
人体行为识别中骨骼特征信息的鸡群优化选择算法
2017-10-13 22:33唐凤宣士斌范晓杰
数码设计 2017年2期
唐凤,宣士斌*,范晓杰
人体行为识别中骨骼特征信息的鸡群优化选择算法
唐凤,宣士斌*,范晓杰
(广西民族大学信息科学与工程学院,南宁,530006)
随着低成本深度传感器的出现,人体行为识别研究吸引了很多研究人员。由于这些设备提供了身体关节的三维位置等骨骼数据,使得基于骨骼的人体行为识别变得简单。但这些关节特征的信息存在部分冗余或者不必要的关节点信息,从而降低识别精度。为此,提出了用改进的CSO(Chicken Swarm Optimization)算法来优化关节点信息的方法,过滤一些不必要的关节点的特征信息,提高了识别精度。改进的CSO算法引入“佳点集”和OS(Ordered Subsets)方法,利用“佳点集”均匀化初始种群;利用OS方法将整个有序种群分成了3个部分,在进行位置更新时,引入猴群算法中的望-眺过程来比拟鸡群在觅食的过程中寻找食物的眺望过程作为其修正公式,加快了算法的收敛速度并且避免算法陷入局部最优。实验结果表明,提出的方法在UTKinect和Florence3D数据集上测试得到的精度分别达到98.01%和93.77%。
行为识别;特征选择;鸡群优化算法;佳点集;有序子集
引言
人类具有从视觉信息感知人体动作的非凡能力,能够准确地定位人、物并跟踪人体运动,通过分析人与物体的交互可以知道人们在做什么并且推断其意图。自动识别与理解人体动作在许多人工智能系统中是非常重要的,在智能视频监控、人机交互、视频分析与检索以及机器人等领域中广泛地应用。尤其是微软Kinect等的出现,这些设备提供了身体关节的三维位置等骨骼数据,然后用各种描述子对相关的运动信息进行描述识别。
文献[1]用固定长度的圆柱体表示相对关节肢体距离和关节角之间的信息,该文章的主要贡献就是采用了数据驱动的马尔可夫链蒙特卡尔理论方法,不需要很大的数据集,但是他们的方法对快速运动和背景比较敏感。文献[2]用了Plagemann 等人提出的基于15个肢体部分的运动学链模型,并提出用一个平滑的似然函数来定位追踪身体的位置,但是在一些系统中(Grest et al.[3], 2005; Knoop et al.[4], 2009)的快速的运动环境下会导致模糊或者追踪定位失败。文献[5]从一个3D点云中粗糙的评估整个身体模型,他们首先找到身体的中心和外部边界点,姿势的表示就简单地用这些点组成的向量来表示,方便定位和追踪,但是得到的精度主要依靠先验的身体姿势。文献[6]用文献[7]中的方法实现了对20个关节点的追踪,并且用傅立叶金字塔来建立关节特征向量之间时间模式的模型,他的主要工作是采用了Actionlet Ensemble (AE)方法,这个方法可以处理骨骼追踪的错误并能得到类内之间更好的特征,但是他没有考虑骨骼局部的相对关系。文献[8]采用了基于李群的几何关系对人体行为进行识别,主要的贡献是用旋转和平移表示不同肢体部分之间的3D几何关系模型。
文献[8]中使用的是相对关节之间的几何关系,所以得到的关节点的信息比较多。对于一些行为或者姿势只用到了手臂或者手上的一些信息,却包括了整个身体肢体特征的信息。比如说举东西这个动作只用到了手臂上的信息,而其他的关节信息就变的冗余了,并且比较容易与其他行为产生混淆;走的这个动作只有下半身的关节坐标会产生相应的变化,而上半身的只有在水平方向有相应的变化,而在纵向和垂向两个方向上没有相应的变化。这些多余的关节特征信息会降低识别的精度,因此关节的哪些信息对识别性能有较高的价值并抛弃关节的哪些特征成为了一个重点考虑的对象。
本文提出了一个改进的鸡群智能优化方法来选择关节的有用信息以提高行为的识别精度,将鸡群的位置信息对应到骨骼特征的选择中去,实现算法对特征信息的选择。因为智能优化算法对初始值的依赖性比较大,所以改进的CSO算法引入佳点集方法对种群初始化,以达到均匀化初始种群的目的,预防种群过早陷入局部最优。还引入了OS方法,将整个有序种群分成了3个部分,在进行位置更新的时候,也就是在迭代过程中,引入猴群算法中的望-眺过程来比拟鸡群在觅食的过程中寻找食物的眺望过程作为其修正公式,加快了算法的收敛速度并且避免算法陷入局部最优。最后将行为的识别精度作为算法的适应度函数得到相应的实验结果。
1 相关工作
1.1 基于李群的骨骼表示
在这一部分中,我们首先介绍基于李群[9]的行为识别方法。由于三维刚体运动是欧几里德群的一部分,作者提出的骨骼表示是基于李群的基础上进行的。即将整个视频中的骨骼变化表示成一个曲率流形。在关节位置的计算上面,分别采用了关节位置的计算和相对关节位置的计算,然后在李氏空间中分别对它们进行旋转和平移操作,形成两种描述子的方法,由20个关节点,19个肢体组成的人体骨骼图如图1所示。

图1 由20个关节点,19个肢体组成的人体骨骼图
Figure1.Human Skeleton is composed of 20 joints and 19 limbs
第一种描述子:关节位置(Joint positions—JP)。在第t帧肢体j的位置可以定义为,肢体的位置定义为其中,表示的是肢体的数目。直接将关节位置随着时间的变化作为行为的一种描述子。
第二种描述子:基于李群的相对关节位置(Relative Joint position based on lie groups—Li_JP)。根据第一种描述子得到了关节的位置,则肢体之间的相对位置表示方式为,其中;以此类推计算所有的两两肢体的相对位置数据。
得到肢体的相对关节之后,将其中一个肢体相对于另一个肢体进行旋转平移,如文献[8]中所示。在两个相对肢体部分的局部坐标系,其中一个向另一个旋转平移示意图如图2所示。

图2 在两个相对肢体部分的局部坐标系,其中一个向另一个旋转平移示意图。
Figure 2.In the local coordinate,the schematic view of two opposite limbs and one of them translate and rotate to another one

(2)
由于肢体的长度不会随着帧数的变化而变化,所以两肢体的相对几何关系可以用式(3)和(4)来表示:
(4)

(6)
将整个人体看作是一个点,用DTW[10](Dynamic Time Warping)方法,一个行为就产生了一条曲线。用傅立叶描述子对曲线进行描述,将得到的傅立叶描述子用一个三层时间金字塔表示,并将每个部分长度的1/4作为其低频系数[6],得到整个视频的特征描述子。
由于文献计算的是相对肢体之间的几何关系,所以对于取点越多的骨骼文献计算量就越大,最后产生的关节的信息也会产生很大的冗余或者不必要的肢体特征,这些肢体特征对行为识别的精度造成一定的负面的影响,从而降低识别精度。本文在这个基础上引入了改进的智能算法对最后的识别精度进行优化,并且取得了较好的结果。
1.2 鸡群算法
鸡群算法是MENG Xianbing[11]等人提出的基于鸡群搜索行为的随机优化算法,他们模拟了鸡群的行为并且它们之间存在等级制度。
整个算法概括如下:
1. 将整个鸡群分成若干个群体,每一个群体均有一只公鸡,若干只母鸡和小鸡组成,母鸡中还包含带小鸡的鸡妈妈。
2. 不同的鸡有不同的移动规律,在一个具体的等级制度下,它们之间存在竞争关系。适应度值大的作为公鸡,最小的最为小鸡,其他的是母鸡,其中母鸡与小鸡的关系是随机建立的。
3. 鸡群中的等级制度,群内关系以及小鸡与母鸡的关系要在数代之后才更新。
4. 群体里的鸡随着它们的组员公鸡寻找食物,并且他们阻止其他种群的鸡来偷吃它们的食物。小鸡跟随鸡妈妈一起寻找食物,并可以随机偷食其他鸡找到的食物。在鸡群里,具有支配地位的个体优先于其他个体先找到食物。
根据上述的规则对每一类鸡分别制定相应的位置更新公式,迭代,直到满足迭代条件停止。所有只鸡,它们在时间的位置表示方法是,该公式表示第个体第维在时间迭代的值。表示的是鸡群搜索食物的维空间。
整个鸡群中三种类型的鸡,每一个个体根据自身的种类不同更新公式不同,公鸡对应于鸡群中适应度值最好的个体,其对应的位置更新公式如下:

(8)
母鸡跟随它们所在的群体寻找食物,并且可以随机偷取其他鸡找到的食物,占有更多主导地位的母鸡比其他个体更容易找到食物,也就是说适应度值越大的母鸡在竞争中的优势越大。则母鸡的位置更新公式如下:

其中,
(10)
根据上面算法的相关描述,小鸡的位置更新数学公式表示如下:
(11)
2 人体行为识别中骨骼特征的鸡群优化选择算法
2.1 佳点集初始化
智能优化算法的收敛过程中,很大程度的依赖于生成的初始值,若产生的初始值太极端,可能很难得到收敛的值。因此引入数论中的佳点集对初始值均匀化[12],如图3,在区域[1,1]之间随机生成600个点。若使用佳点集法产生的点是均匀分布在图像中如图a,若未使用,则生成的点则是散乱的分布在图像中如图b。因此使用佳点集可以有效的预防算法过早陷入局部最优,并提高搜索效率,a佳点集生成的点图; b、随机生成的点图如图3 a、b所示。

图3. a、佳点集生成的点图;
Figure 3. a. A dot plot is generated by good point set ;

图 3. b、随机生成的点图
Figure 3. b. A dot plot is generated by random.
2.2 基于有序子集(OS)的鸡群优化算法(Chicken Swarm Optimization based on ordered subsets —OS_CSO)
在有序子集的方法中,将整个数据集分成T个有序子集。其中的子集水平定义为这些子集的数目。每次迭代时使用相应的更新公式对子集内的每个数据进行修正,这样所有的子集中的数据就被修正一次,得到的整个数据集就被更新了T次,完成一次迭代过程。与传统的迭代更新算法相比较,在相同的时间和计算量的基础下,数据集被多更新了T次,因此有序子集方法具有加快收敛速度的作用。我们将这个方法应用到鸡群优化算法中来,以此提高算法的收敛速度。
在鸡群优化算法中,整个算法分成的是三个子集,分别是公鸡,母鸡,小鸡三个群体,各个子集水平则为公鸡,母鸡,小鸡对应的群体个数。每次迭代的时候我们效仿猴群算法[13]中望-眺的过程作为OS方法中的修正公式。鸡群在寻找食物的过程中,可以通过眺望的过程,在视野范围内寻找优于当前位置的点,然后去食物更多的位置觅食。相应的步骤如下:

2)若是更新后的群体比未更新的群体的适应度值大,则用更新后的群体替代以前的群体,得到新的适应度值,反之则不替换。
其中,在对应鸡群更新位置公式的时候,其他鸡群的位置保持不变,计算相应的适应度值。以此类推,得到最后的实验结果。因为在OS方法中引入了鸡群的眺望动作,在提高算法的收敛速度的同时也避免算法陷入局部最优。
2.3 人体行为识别中骨骼特征的鸡群优化选择算法
当使用骨骼特征向量的时候,特征向量信息的选择成了值得考虑的问题,由于这些特征信息可能包含降低识别精度的不相关或者冗余的信息。事实上,不相关或者冗余的信息对有用的特征信息的影响比较大,大多数的分类器不能区分开它们。所以特征的选择在于找到优化分类的子集,以找到更好的分类性能,得到更高的分类精度。
比如对于跑跟走的两个动作,两者之间需要的关节特征是差不多的,但是跑的时候人体的躯干上的纵坐标会发生一定的变化,而对于走路的这个姿势几乎是不变的,所以这个时候人体躯干上纵坐标的特征对于走的这个姿势就显得冗余了,而且可能会让分类器混淆对这两个动作正确的判断。如果我们将躯干上纵坐标的特征用0表示,表示没有选择这个特征。这样子即使走的这个姿势在躯干的纵坐标上有轻微的变化也不会影响最后的分类的结果,也对行为识别产生了一定的鲁棒性,提高了分类器的识别精度。最后的实验结果显示选择了之后的关节信息降低了动作之间的混淆程度,大大的提高了动作的识别精度。
本文主要的贡献是用改进的CSO算法选择关节特征信息。将个体的关节特征信息选择编码成一个布尔数组,数组的值表示对于该特征信息在识别系统中选或者不选。需要注意的是,数组的维数在不同的模型中已经选择好了,也就是识别特征信息的数目是确定的,也就是鸡群觅食的搜索空间。在整个算法的计算过程中,我们将位置搜索空间固定在和之间,其中,搜索空间为维,对应于文中关节特征的总数目。由于计算的是鸡群的最优位置,在这个过程中会产生小数,我们设计若产生的数是大于等于0.5(按实验的经验取值),则向上取整,反之向下取整。再根据这个数组进行计算,0表示的是不选,1表示的是选择。需要注意的是迭代更新的位置是在按上述规则取值之前的数据计算的,所以取值后的操作是不影响位置的更新,只会影响适应度大小的求解。最后再把得到的行为识别精度作为适应度函数值。参照图1建立的模型表一所示。

表 1 骨骼特征信息选择模型
在大多数使用相对骨骼位置和骨骼位置进行特征计算的文献中,学者们使用的是全部肢体或者关节的所有信息进行特征表示,但不是所有的肢体或关节特征对最后的识别有用,相反,有的肢体或关节特征会混淆最后的识别,导致精度下降。我们提出基于CSO算法的特征选择[14],对信息进行优化,选取有效的关节特征进行识别。算法流程如下:
2. 评估初始种群的适应度值,将种群的代数设为0;
3. 判断种群的代数是否大于最大的迭代次数,如果大于,则停止计算,输出相应的最大适应度值(识别精度),否则转向第4步;
5. 根据得到的适应度值排序,并建立一个等级制度,得到一个有序子集。将一个鸡群划分成若干个群体并确定小鸡与鸡妈妈的关系。转向第6步。
6. 根据公式7得到公鸡的位置更新公式,根据OS方法,用公式12替代公式7中的位置信息,计算适应度值,小鸡和母鸡的位置信息不变。若得到的适应度值比未替代之前的适应度值大,则替代式7,否则不替代。其中,的值取为0.25。根据式9和11分别得到母鸡和小鸡的位置更新公式,跟公鸡的位置更新处理一致。其中,的值分别取为0.2和0.1(按实验的经验取值)。转向第7步。
7. 更新鸡群中个体当前最优位置和鸡群的全局个体最优位置,迭代次数加1,并转向第3步。
在用改进的CSO算法对特征选择进行优化的过程中,由于智能优化算法对初始值的依赖性很强,一个好的初始值可能会让算法很快得到全局最优,反之,也有可能让算法陷入局部最优,针对这个问题,我们提出了佳点集对算法的初始值进行了优化处理,得到一个分布比较均匀的初始值,可避免算法过早陷入局部最优。然后根据群体的位置信息决定骨骼特征信息在计算的过程中是选还是不选。在算法的位置更新上,也就是在迭代的过程中,引入了OS方法,将整个群体分成了三个子集,在一定的程度上加快了算法的收敛性并避免陷入局部最优。
3 实验分析
本文在数据集UTKinect-Action[15]和Florence3D-Action[16]上进行比较,为了使得人体骨骼在场景中的位置数据不变,所有的三维关节位置坐标均从世界坐标系转换为以人体的髋关节为坐标中心的局部坐标系中。在所有的实验中,我们均采用3层傅立叶时间金字塔得到描述系数,并使用每个部分的1/4作为低频系数。最后均采用动态时间规划、傅立叶时间金字塔和线性SVM(Support Vector Machine)方法对得到的描述子进行分类。
UTKinect-Action数据集:这个数据集用一个固定的Kinect传感器获得。它由10个行为组成,分别为:walk, sit_down, stand_ up, pick _ up, carry, thow, push, pull, wave_ hands, clap_ hands。这10个行为由10个不同的人来演示。每一个人展示每一个行为2次,其中一个是无效的,总共产生199个行为序列。这个数据集提供了20个关节点的三维位置信息,由于视点和类内的变化,识别这个数据集是一项充满挑战的任务。
Florence3D-Action数据集:这个数据集用一个固定的Kinect传感器获得。它由9个行为组成,分别为:wave, drink, answer phone, clap, tight lace, sit down, stand up, read wath, bow。这9个行为有10个不同的人来演示,每一个人对于每一个行为重复2次或者3次。总共产生215个行为序列。这个数据集提供了15个关节点的三维坐标位置。由于类内的多变性(一些行为在一些序列中用左手而在另一些序列中用右手),并且有一些行为的表现方式也比较相似,像喝水和打电话这两个行为的动作就比较的相似,对这个数据集的识别也是一项比较有挑战性的任务。
表2显示了关节位置(JP)方法在数据集UTKinect-Action和Florence3D-Action中的识别率。在数据集UTKinect-Action中,在JP的基础上使用了CSO方法之后数据集的识别率比之前方法的精度提高了1.44%,在JP的基础上使用了改进的CSO方法之后比原来方法的精度提高了2.33%。在数据集Florence3D-Action中,使用CSO方法和改进的CSO方法数据集的识别精度分别提高了2.44%和3.77%。
表2 关节位置(JP)方法在数据集UTKinect和Florence3D上不同方法识别率的比较

Table 2 The comparison of different methods’ recognition rate base on JP in UTKinect dataset and
表3显示了基于李群的关节位置(Li_JP)方法在数据集UTKinect和Florence3D上不同方法识别率。在数据集UTKinect-Action中,在Li_JP的基础上使用了CSO方法之后数据集的识别精度比之前的方法提高了0.52%,在Li_JP的基础上使用了改进的CSO方法之后比原来方法的精度提高了0.93%。从得到的数据上分析,算法的识别精度在改进后提高的不是特别明显,主要的原因是Li_JP的识别精度在UTKinect-Action已经很高了,每一次精度的提高都是一种挑战,更是一种突破,因此,算法的改进还是有效的。在数据集Florence3D-Action中,使用CSO方法和改进的CSO 方法数据集的识别精度分别提高了1.63%和2.89%。
表3 基于李群的关节位置(Li_JP)方法在数据集UTKinect和Florence3D上不同方法识别率的比较

Table 2 The comparison of different methods’ recognition rate base on Li_JP in UTKinect dataset and Florence3D dataset
在数据集UTKinect和Florence3D上生成的混淆矩阵的数据如图4所示。
从得到的混淆矩阵可以看出,在图4a中,数据集UTKinect数据集中throw和push、clap-Hands、pull; walk和pick_up比较容易产生了混淆。在图4b中,只有throw和push,pull,clap_hands比较容易产生混淆。图a和图b分别是在未优化关节点信息特征和使用了改进的鸡群优化算法优化关节点信息特征的基础上得到的混淆矩阵,从两个图的对比上可以看出,优化后的pick_up, throw等动作的识别精度提高了,并且throw和pull,clap_hands的混淆率降低了。在图4c中,drink和wave、answer phone;answer phone 和read watch、clap、read watch;read watch和wave、answer phone、clap产生了比较明显的混淆。在图d中,drink和answer phone;answer phone 和drink、clap;read watch和clap产生了比较明显的混淆。从两幅图的对比上看,使用了改进的鸡群优化算法进行特征选择后改善了read watch 和drink、answer phone等比较容易混淆的动作,从得到的单个动作的识别精度上看,wave,drink, answer phone等动作的识别精度明显得到了提高。综合以上两个实验的对比,说明了使用改进的鸡群优化算法对关节点信息特征选择可以减少动作之间的混淆并且提高识别精度。因此,也进一步说明了提出的算法的有效性。
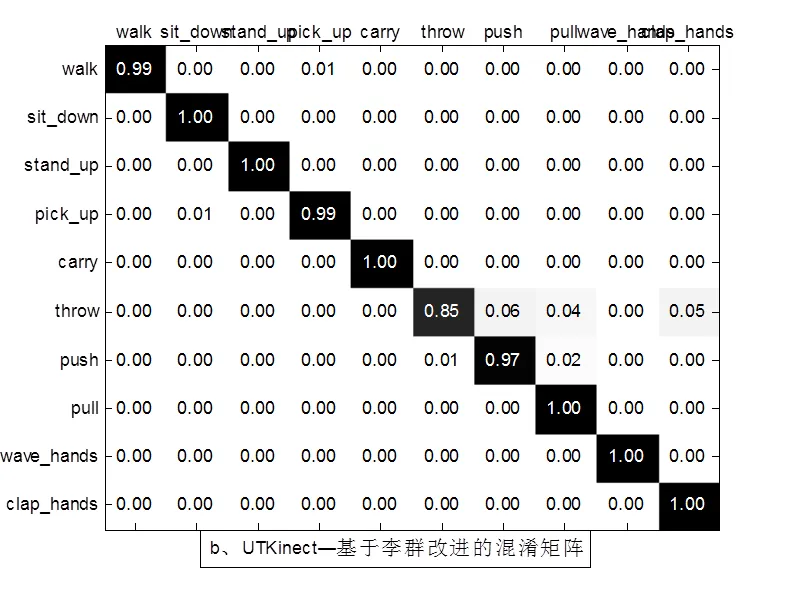

图4 混淆矩阵a、b是基于UTKinect数据集方法JP和JP用改进的CSO方法—Li_JP得到的混淆矩阵;c、d是基于Florence3D数据集用同样的两种方法得到的混淆矩阵。
Figure 4.a and b are confusion matrix base on JP and JP using improved CSO-Li_JP in UTKinect dataset respectively;c and d are confusion matrix base on same methods in Florence3D dataset respectively;
数据集Florence3D中喝水和打电话这两个动作比较容易混淆,因为都是在头部上面的相关动作,并且手臂对头部也会有一定的遮挡的作用,使得计算机更加容易混淆,因此这也是以后我们需要努力与改进的方向。总的来说,这几种混淆的动作大多是同一肢体上的运行,所以比较容易产生混淆。这也是视频行为识别的难点之一。
改进后算法的收敛性和识别精度均得到了提高,在两个数据集上的Li_JP方法上同时使用CSO方法和改进的CSO方法举例说明。如图5_a所示,表示的是在数据集UTKinect-Action上算法的收敛性和识别精度,从图中可以直观的看出,改进后的算法无论在识别精度还是在收敛速度上均优于为改进的算法。我们将算法的迭代次数设置为400代,从图中可以看出,改进前算法的迭代收敛代数在第270代左右,而改进后算法在160代左右就收敛了,并且精度也有所提高。如图5_b所示,和图5_a类似,表示的是Florence3D-Action数据集上的识别精度和算法的收敛速度,也能得到和上个数据集一样的结果。我们将算法的迭代次数设置为250代,从图中可以看出,改进前算法的迭代收敛代数在第200代左右,而改进后算法在120代左右就收敛了,并且精度也有所提高。实验证明说明OS方法对算法的收敛速度有一定的提高作用并且有利于实验识别精度的提高,并且都这两个不同的数据集都达到了期望的结果,UTKinect-Action dataset收敛曲线;Florence3D-Action dataset收敛曲线如图5 a、b所示。

图5 a、UTKinect-Action dataset收敛曲线b、Florence3D-Action dataset收敛曲线
Figure 5 a. The convergence curve of UTKinect-Action dataset b.The convergence curve of Florence3D-Action dataset
提出的这个方法也优于许多已经存在的基于这两个数据集的方法,如表4。在同一个数据集上,提出的方法比文献15中的Histograms of 3Dionts方法得出的识别精度高了7.09%,比文献17中Random forests方法高了10.11%。比文献16中的Multi-part Bag-of-Poses方法高出11.77%。
表4 与其他方法的实验结果比较

Table 4 Comparison with other methods’ experimental results
4 结语
在本文中,我们将一个人体骨骼看作是一个点,将一个行为看作是一条曲线。建立三维位置的关节模型,最后对该曲线用傅立叶时间金字塔描述,得到相应的描述子。对描述子用改进的CSO算法进行优化,用线性SVM对优化后的描述子分类,得到分类结果。在用改进的CSO算法对关节进行选择的时候,将种群的位置与关节的选择对应起来,由于在位置更新的时候相应的位置数据会产生小数的情况,我们设定当位置信息大于某个小数时则向上取1,否则取0。取后的实验数据并不影响种群的位置更新,再用得到的识别精度作为适应度函数值。改进的CSO算法引入佳点集的方法对种群初始化,预防种群过早陷入局部最优。还引入了OS方法,将整个有序种群分成了3个部分,在进行位置更新的时候,也就是在迭代过程中,引入猴群算法中的望-眺的过程来比拟鸡群在觅食的过程中寻找食物的眺望过程作为其修正公式,加快了算法的收敛速度。实验结果表明本文提出的方法比其他很多方法在这两个数据集得到的结果均要高出很多。由于在这两个数据集中没有涉及到人与人之间的交互运动,所以在以后的工作中,我们要更加注重研究人与人之间的交互活动以及在更加嘈杂的坏境中得到更高的识别精度。
[1] Siddiqui, M., Medioni, G., 2010. Human pose estimation from a single view point, real-time range sensor. In: 2010 IEEE Computer Society Conf. on ComputerVision and Pattern Recognition Workshops (CVPRW), pp. 1-8.
[2] Ganapathi, V., Plagemann, C., Koller, D., Thrun, S., 2010. Real time motion capture using a single time-of-flight camera. In: 2010 IEEE Conf. on Computer Vision and Pattern Recognition (CVPR), pp. 755-762.
[3] Grest, D., Woetzel, J., Koch, R., 2005. Nonlinear body pose estimation from depth images. In: Proc. of the 27th DAGM Conf. on Pattern Recognition. Springer-Verlag, Berlin, Heidelberg, pp. 285-292.
[4] Knoop, S., Vacek, S., Dillmann, R., 2009. Fusion of 2D and 3D sensor data for articulated body tracking. Robot. Autonom. Systems 57, 321-329.
[5] Schwarz, L.A., Mateus, D., Castaneda, V., Nava, N., 2010. Manifold learning for tofbased human body tracking and activity recognition. In: British Machine Vision Conf. (BMVC).
[6] J. Wang, Z. Liu, Y. Wu, and J. Yuan. Mining Actionlet Ensemble for Action Recognition with Depth Cameras. In CVPR, 2012. 2, 5, 7.
[7] Shotton, J., Girshick, R., Fitzgibbon, A., Sharp, T., Cook, M., Finocchio, M., Moore, R.,Kohli, P., Criminisi, A., Kipman, A., Blake, A., 2012. Efficient human poseestimation from single depth images. IEEE Trans. Pattern Anal. Machine Intell., 1.
[8] Raviteja Vemulapalli.Human Action Recognition by Representing 3D Skeletons as Points in a Lie Group.IEEE Conference on Computer Vision & Pattern Re..., 2014: 588-595
[9] B. Hall. Lie Groups, Lie Algebras, and Representations: An Elementary Introduction. Springer, 2003. 3.
[10] 孙焘, 夏斐, 刘洪波. 基于动态规划求解时间序列DTW中心[J]. 计算机科学, 2015(12) : 278-282. (Sun T, Xia F, Liu H B . Calculating DTW Center of Time Series Using Dynamic Planning[J]. Computer Science,2015(12) : 278-282. )
[11] MENG X B, LIU Y, GAO X Z, et al. A new bio-inspired algorithm: chicken swarm optimization[C]/ /5th International Conference on Swarm Intelligence. Hefei: Springer International Publishing, 2014: 86-94.
[12] 李志俊, 程家兴. 基于数论佳点集的遗传算法初始种群均匀设计[J]. 电脑与信息技术. 2007(04). 29-32.(Zhi-jun LI ,Jia-xing CHENG Uniform Design of Initial Population of Genetic Algorithm Based on Good Point Set.Computer and Information Technology.2007(04).29-32.)
[13] 陈信, 周永权. 基于猴群算法和单纯法的混合优化算法[J]. 计算机科学. 2013(11)。248-254. (Xin C,Yongquan Z.Hybrid Algorithm Based on Monkey Algorithm and Simple Method. Computer Science. 2013(11): 248-254.)
[14] 黄炜, 黄志华.一种基于遗传算法和SVM的特征选择[J]. 计算机技术与发展. 2010(06): 21-24. (Huang W, Huang Z H.Feature Selection Based on Genetic Algorithm and SVM[J]. Computer Technology and Development.2010(06):21-24.)
[15] L. Xia, C. C. Chen, and J. K. Aggarwal. View Invariant Human Action Recognition Using Histograms of 3D Joints. In CVPRW, 2012. 2, 3, 5, 7.
[16] L. Seidenari, V. Varano, S. Berretti, A. D. Bimbo, and P. Pala. Recognizing Actions from Depth Cameras as Weakly Aligned Multi-part Bag-of-Poses. In CVPRW, 2013. 2, 5, 7.
[17] Y. Zhu, W. Chen, and G. Guo. Fusing Spatiotemporal Features and Joints for 3D Action Recognition. In CVPRW, 2013. 3, 6, 7.
Selecting Optimal Skeletal Features Information in Human Action Recognition by Chicken Swarm Optimization
TANG Feng, XUAN Shibin*, FAN Xiaojie
(College of Information Science and Engineering, GuangXi University for Nationalities, Nanning, Guangxi, 530006, China)
With the low-cost depth sensors developed, human action recognition has attracted the attention of many researchers. Since these devices provided skeletal data consisting of 3D positions of body joints, human action recognition became simple. But these might contain irrelevant or redundant features information of body joints that could cut down recognition accuracy. An improved CSO (Chicken Swarm Optimization) is used to optimize features information of body joints by filtering unnecessary data. The Good Point Set and OS (Ordered Subsets) are added to the improved CSO algorithm. The Good Point Set is used to uniform initial population .The OS method divides entire ordered population into three parts correspondingly. During the process of updating position information, the Monkey Algorithm’s gaze afar motion is regarded as the process of gazing afar when chicken looking for food, and revised formula is established. It improved the convergence speed of algorithm and avoided falling into local optimal. The proposed approach has been tested on UTKinect-Action dataset and Florence3D-Action dataset. Experimental results show that our method gains test accuracy with 98.01% and 93.77% respectively.
action recognition;features selection;improved CSO;Good Point Set;Ordered Subsets
10.19551/j.cnki.issn1672-9129.2017.02.02
TP39
A
1672-9129(2017)02-0009-008
2016-12-14;
2017-01-09。
本课题研究受广西自然科学基金(2015GXNSFAA139311)资助(National Natural Science Foundation of Guangxi, China (2015GXNSFAA139311))
宣士斌,广西民族大学信息科学与工程学院。
E-mail:sbinx@qq.com
引用:唐凤, 宣士斌, 范晓杰. 人体行为识别中骨骼特征信息的鸡群优化选择算法[J]. 数码设计, 2017, 6(2): 9-16.
Cite:Tang Feng, Xuan Shibin, Fan Xiaojie. Selecting Optimal Skeletal Features Information in Human Action Recognition by Chicken Swarm Optimization[J]. Peak Data Science, 2017, 6(2): 9-16.
猜你喜欢
一重技术(2021年5期)2022-01-18
读者·校园版(2020年11期)2020-06-04
第一财经(2019年6期)2019-06-25
电子制作(2018年11期)2018-08-04
天津诗人(2017年2期)2017-11-29
华人时刊(2016年16期)2016-04-05
海外英语(2013年5期)2013-08-27
养殖与饲料(2011年2期)2011-12-09
中学生英语高中综合天地(2009年6期)2009-07-30
职业·中旬(2009年12期)2009-06-01
