重型越野汽车DMEPS系统设计与验证
2017-10-17 03:41史小川高锦虎忠周元豪
汽车实用技术 2017年18期
史小川,高锦,虎忠,周元豪
(陕西重型汽车有限公司,陕西 西安 710200)
重型越野汽车DMEPS系统设计与验证
史小川,高锦,虎忠,周元豪
(陕西重型汽车有限公司,陕西 西安 710200)
为研究电动助力转向对重型军用越野汽车操纵性及燃油经济性的改善情况, 同时为混合动力技术在重型越野汽车的应用做技术储备,根据重型车辆前桥轴荷较大的特点,设计了基于双电机的电子助力转向系统(DMEPS)。依据目标车型的性能参数及DMEPS控制策略,以车辆动力学仿真软件ADAMS和Simulink为平台,建立了目标车型的整车动力学和控制策略联合仿真模型。重点仿真研究DMEPS系统控制策略的响应跟随能力及系统对整车转向轻便性的影响。并通过快速原型控制器对控制策略进行了台架试验验证,结果表明,文章设计的DMEPS系统控制策略具有良好的响应跟随能力,同时与常规液压助力转向系统相比,在转向轻便型方面具有明显的优势。
助力转向系统;永磁同步电机;控制策略;联合仿真
Abstract:For the purpose of reduce the braking distance and improving brakperformance for heavy off-road vehicle,Aelectronically controlled brakesystem (EBS) wasdesigned. on the platform of MATLAB/Simulink, dynamic model of vehicle and control model ofEBS was established. Emphasis is placed on studies of the braking ability of EBS in different working condition,and verifyinging are with the date of ABS test the rationality of the system through comparing with the data of ABS test.The result show that EBS which designed in this paper has obvious advantage in reducing brake response time and enhancing brake security.
According to the characteristics of the steering system in a higher load heavy off-road vehicle, Double motor electric power steering system (DMEPS) was designed, on the platform of ADAMS and Matlab / Simulink, dynamic model of heavy cross country vehicle and control model of DMEPS was established. Then through jointing simulation of these two models,researches the influences of DMEPS on the vehicle control stability in different working condition. Compared to hydraulic power steering system, The simulation results show that the problems of steering ensiness and road feel were solved, and the return ability was increased.
Keywords: Double motor electric power steering system; Co_simulation; control algorithm
CLC NO.: U467.1 Document Code: A Article ID: 1671-7988 (2017)18-61-05
前言
EPS作为一种新型的助力转向系统,现已广泛应用于乘用车辆。与传统的液压助力转向相比,EPS具有可调的助力特性以及良好的转向跟随性及燃油经济性,可有效降低路面不平对转向系统产生的扰动。在重型车辆领域,由于转向轴荷大,转向时需要较大助力矩,现有助力电机的技术无法满足其对助力矩的需求,目前国内仅有少数科研院校开展了相应的理论及试验研究。
本文针对重型越野汽车转向轴荷大,行驶工况恶劣等特点,以陕汽4×4装甲车为目标车型,设计了双电机助力转向系统(DMEPS:Double Motor Electric Power Steering System)。通过ADAMS和Simulink仿真平台,重点仿真研究所设计的DMEPS系统控制策略的响应跟随能力及系统对整车转向轻便性的影响。并将仿真结果与装备液压助力转向系统的目标车型在同工况下得到的试验结果相对比,验证所设计的DMEPS系统的合理性及优越性。
1 DMEPS系统结构设计
1.1 总体方案设计
在参考乘用车辆成熟EPS系统的基础上,设计双电机助力转向系统。该系统以陕汽4×4反伏击装甲车为目标车型,其主要技术参数如表1所示:

表1 整车技术参数
图1为所设计DMEPS的系统结构示意图。系统主要由扭矩转角传感器总成、DMEPS控制器、减速器、助力电机驱动器、助力电机总成等零部件组成。DMEPS控制器通过其私有 CAN总线和车身 CAN总线读取驾驶员扭矩输入信号、方向盘转角信号及车速信号。根据控制策略分别输出目标电流控制信号至左右助力电机驱动器,由左右助力电机驱动器调制三相交流电,驱动永磁同步助力电机输出电磁力矩。该力矩经过减速器增扭后施加到转向梯形机构,为转向系统提供转向助力矩。

图1 DMEPS系统结构图
1.2 助力电机设计选型
EPS助力电机一般有无刷及有刷结构形式,有刷电机控制相对简单,但是由于其电磁辐射严重,不适于在军用车辆上应用。因此该方案助力电机结构确定为无刷电机。
电机选型时其输出扭矩应保证其最大输出力矩经减速器减速增扭后大于目标车辆的最大极限转向阻力矩,该阻力矩由三部分组成:转向轮相对主销轴线的滚动阻力矩T1,轮胎与地面接触部分的滑动摩擦摩擦力矩T2,转向车轮的自动回正力矩所形成的阻力矩T3。计算公式如式1所示:

式中:M1为满载时转向轴载荷;g为重力加速度;f为车轮滚动阻力系数,a为主销偏移距;φ为地面附着系数; rg为轮胎滚动半径;rs为轮胎静力半径;β为主销内倾角;γ为主销后倾角;为内轮的平均转角;为外轮的平均转角。
静态原地转向阻力矩MS0计算公式如2式:

作用在两个减速器摇臂上的力矩和M转计算公式如3式:

式中 ip为转向传动机构的力传动比;η'为转向传动机构的效率。
经计算作用在两个减速器摇臂上的力矩和为3695 N·M。因本文选用减速器减速比为20:1,则单个助力电机的最大输出扭矩必须大于92.34 N·M,同时其额定转速必须大于驾驶员操纵方向盘的最大角速度(经验值为55r/min)。
结合电机扭矩、转速需求及车辆供电情况,选用某型号永磁同步电机总成,该总成由永磁同步助力电机和减速比为20:1的行星齿轮减速器组成,其主要技术参数如表2所示:

表2 助力电机总成技术参数
1.3 控制器及传感器设计选型
DMEPS控制器作为系统的核心部件,其作用是通过采集方向盘扭矩信号、方向盘转角信号、车速信号,根据系统控制策略输出左右电机目标电流。其中控制器的输入输出信号均为 CAN信号。经过对比,选用主频为 40MHZ的MC9S12XEP100为DMEPS控制器的MCU。该芯片拥有的4路高速CAN通道,最高通讯速率可达10Mbit/s,能为系统提供高效的信号采集、运算及输出功能。
助力电机驱动器的功能是根据控制器输出的目标电流信号,将系统24V直流电源转变为永磁同步助力电机电枢绕组中的三相交流电流,以产生系统所需要的助力力矩,其性能直接影响系统的执行及响应跟随能力。根据所选助力电机的参数,并取安全系数为1.3,其单相驱动电流必须大于86.4A。通过参照成熟的电机驱动电路,选用绝缘栅双极型晶体管(IGBT)作为三相逆变电路的功率开关器件。IGBT综合了MOSFET和GTR的优点,具有高输入阻抗、高开关频率和大电流、低饱和电压等特点,可有效保证系统的执行及响应跟随能力。
扭矩转角传感器总成是DMEPS系统的关键部件,主要作用是将方向盘的输入力矩及转角转变为电信号,供控制器采集运算。其信号的准确性、实时性及抗干扰能力极大的影响着系统的性能。本文所设计的DMEPS系统采用定制的扭矩转角传感器总成,满足军用车辆环境使用要求。该总成作为DMEPS系统私有CAN总线上的一个节点,通过总线发送方向盘输入扭矩及方向盘转角信号,可有效屏蔽复杂电磁环境对采集信号的干扰,保证所采集信号的准确性。
2 联合仿真系统建模
2.1 整车多体动力学模型
以ADAMS/VIEW为平台,建立了目标车型的整车模型,包括悬架系统、转向系统等子系统。在建立模型过程中,除阻尼、弹性元件和轮胎外,其余零件均认为是刚体。几何定位点的坐标根据图纸查的,轮胎特性参数和路面谱参数根据国标GB/T 6323.5-94所规定的汽车操纵稳定性试验方法转向轻便性试验要求编制。其中前后悬架均为双横臂式独立悬架,扭矩传感器模型的建立是将转向管柱断开为两部分,在断开处加一扭簧,刚度参数为实际扭矩传感器所用扭杆的刚度。在左右助力电机输出轴上分别添加一力矩元素,大小由VARVAL函数执行来自 Simulink的输出状态变量。同时定义状态变量,向Simulink模型输出车速、方向盘转角、方向盘输入扭矩的测量值。整车多体动力学模型如下图2所示:

图2 整车多体动力学模型
2.2 DMEPS系统控制策略及模型
本文所设计的DMEPS系统的控制策略为双层结构控制,即主环路控制和伺服环路控制。主环路控制为DMEPS系统的运动控制,控制器读取系统私有CAN总线和车身CAN总线上的驾驶员扭矩输入信号、方向盘转角信号及车速信号,通过判断车辆的运动模式。采用查 MAP表的方式计算输出目标电流,其中所查 MAP表根据折线型助力曲线制定。伺服环路控制为助力电机的力矩控制,本文对助力电机输出力矩的控制方法为SVPWM(Space Vector PWM)。该方法是一种优化的PWM控制技术,能明显减小逆变电路输出的谐波成分及电机的谐波损耗,降低转矩脉动,且控制简单,电压利用率高,可实现对所需助力的足够跟踪精度。控制策略原理如图3所示:

图3 DMEPS控制策略原理图
根据上述控制策略,在 MATLAB/Simulink中建立了控制器模型、左右助力电机驱动器模型及左右助力电机模型。
2.2.1 控制器模型
控制器模型主要实现系统控制策略中主环路控制功能,即根据采集的方向盘输入扭矩信号、方向盘转角信号及车速信号,判断车辆的运动模式,并计算输出目标电流。文中所建控制器模型由运动模式判断模块、助力模式模块、回正模式模块、阻尼模式模块及目标电流处理模块组成。其中运动模式判断模块采用Stateflow建模,其输入信号为方向盘输入扭矩信号、方向盘转角信号。输出信号为工作模式状态、助力模式标志位、回正模式标志位和阻尼模式标志位。通过各工作模式标志位的状态调用相对应的工作模式,采用查MAP表的方式输出目标电流至目标电流处理模块,在该模块中对目标电流采用斜坡算法处理后输出。控制器模型如图4所示:

图4 控制器模型
2.2.2 助力电机驱动器及助力电机模型
在DMEPS系统中,左右助力电机驱动器及助力电机模型的建模方法及参数均相同。本文仅介绍右电机驱动器及电机的建模方法及模型结构。
电机驱动器模型的功能是将控制器模型输入的目标电流与电机模型反馈电流的差值作PI控制后,计算出d、q轴电枢电压Ud、Uq。经过Park逆变换为两相静止绕组α、β轴上的电压Uα、Uβ,并输出至SVPWM模块。在SVPWM模块中,由Uα、Uβ计算出合成的电压空间矢量所处扇区及单个周期T内合成七段式PWM波所需的时间T1、T2。其中d、q轴电枢电压Ud、Uq计算公式如式4:

式中:Ud、Uq为 d、q轴电枢电压;id、ia为 d、q轴电枢电流;Ld、Lq为定子绕组自感;P为微分算子;Ra为定子绕组电阻;ω为转子旋转角速度;ψfm为与定子u、v、w相交链的永磁体磁链幅值;
两相静止绕组α、β的电压Uα、Uβ的计算公式如式5:

式中:θ为u相绕组轴线与d轴之间的电角度;

式中:sign(x)为符号函数,如果x>0,sign(x) =1,如果sign(x) =0;B0、B1、B2为辅助变量,其计算公式如式7:

单个控制周期T内合成七段式PWM波所需的时间T1、T2在各扇区数值如表3所示:

表3 T1、T2与扇区对应关系
表2中所列X、Y、Z由式8计算可得:

式中:T为单个控制周期所需时间;UDC为驱动器电源电压;
助力电机模型采用Simulink提供的永磁同步电机模型,并依照所选用得助力电机设置相关性能参数。助力电机驱动器及助力电机模型如图5所示:

图5 助力电机驱动器及助力电机模型
2.3 联合仿真模型
本文首先在ADAMS/VIEW环境中定义状态变量,以方向盘输入力矩、方向盘转角及车速为系统输出量,以加在助力电机输出轴上的助力矩和整车驱动力为控制输入量。通过ADAMS/Controls模块将整车动力学模型输出至MATLAB环境中,以ADAMS整车模型子系统来表示,最后建立以目标电流为控制参数的DMEPS联合仿真模型,如图4所示:

图4 DMEPS系统联合仿真模型图
3 DMEPS系统仿真结果分析
3.1 控制策略仿真分析
利用所建立的联合仿真模型,本文对系统控制策略的响应跟随能力在原地转向工况下进行了仿真研究,其中转向时方向盘最大转角为±600°。仿真结果如图5、图6所示:

图5 左电机目标电流与输出力矩的跟随关系
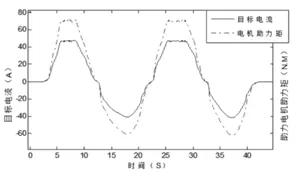
图6 右电机目标电流与输出力矩的跟随关系
图5、图6分别为DMEPS控制器输出的目标电流与左右助力电机输出力矩的跟随关系。可见,随着方向盘角度的变化,DMEPS控制器根据控制策略实时计算出目标电流,由电机驱动器响应目标电流并驱动电机输出助力矩,助力电机输出力矩对目标电流有良好的跟随响应能力。
3.2 转向轻便性仿真分析
DMEPS系统设计的主要目的在于提高重型越野汽车低速行驶转向时的转向轻便性,解决转向轻便性和路感之间的矛盾。限于篇幅,本文仅重点仿真研究所设计的DMEPS系统对目标车型转向轻便型的影响。
根据国标GB/T 6323.5-94所规定的汽车操纵稳定性试验方法转向轻便性试验规定,以地面附着系数为0.7的平坦混凝土路面为仿真路谱,使整车模型以10Km/h的车速沿双纽线路径行驶。转向盘输入力矩仿真结果与装备有液压转向助力系统的目标车型在相同试验工况下得试验数据对比结果如图7和表3所示:

图7 方向盘输入力矩与转角的关系曲线
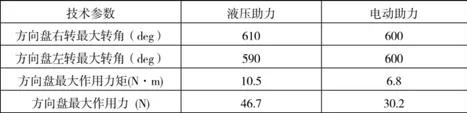
表3 转向轻便性特征值表
由图7和表3可知,液压助力转向系统在转向轻便性试验中,方向盘最大作用力矩为10.5N·m,最大作用力为46.7N,双电机助力转向系统方向盘最大作用力矩为6.8N·m,最大作用力为 30.2N,其转向轻便性较液压助力转向系统具有明显优势。
4 结论
仿真试验及台架试验结果表明:
文中设计的DMEPS系统,其控制策略可准确采集并处理方向盘扭矩信号,方向盘转角信号及车速信号,并能实时输出目标电流至左右电机驱动器驱动助力电机提供助力矩,具有良好的响应及跟随能力。同时该系统与传统的液压助力系统相比具有更加优越的转向轻便性。
[1] 余志生.汽车理论[M].北京:清华大学出版社,2007.56-70.
[2] 李修曾,伦景光.GB/T 6323.5—94,汽车操纵稳定性试验方法转向转向轻便性试验[S].清华大学,长春汽车研究所:1994.
[3] 林逸,施国标,邹常丰等.电动助力转向助力控制策略的研究[J].设计·计算·研究,2003.
[4] Ji-Hoon Kim,Jae-Bok Song. Control logic for an electric power steering system using assist motor [J].Mechatronics, 2002,12:447-459.
[5] 寇宝泉,程树康.交流伺服电机及其控制[M].北京:机械工业出版社,2008.53-65.
[6] 徐忠明,胡康博等.基于Adams和Matlab的汽车EPS控制联合仿真[J].重庆理工大学学报,2010.
[7] 施国标,邹常丰.林逸等.电动助力转向系统的建模与仿真技术[J].吉林大学学报:工业版,2007,37(1):31-36 [2].
[8] 王其东,杨孝剑,陈无畏等.电动助力转向系统的建模与控制[J].农业机械学报.2004,35(5):1-4,,24.
Design and Validate Of Double Motor Electric Power Steering System For Heavy Military Vehicle
Shi Xiaochuan, Gao Jin, Hu Zhong, Zhou Yuanhao
(Shaanxi Heavy Duty Automobile Co., Ltd., Shaanxi Xi’an 710200)
U467.1 文献标识码:A 文章编号:1671-7988 (2017)18-61-05
10.16638/j.cnki.1671-7988.2017.18.022
史小川,学士,助理工程师,就职于陕西重型汽车有限公司、主要从事汽车电器系统开发。高锦,学士,助理工程师,就职于陕西重型汽车有限公司、主要从事汽车电子电器产品的设计与开发工作。虎忠,硕士,工程师,就职于陕西重型汽车有限公司。主要从事汽车嵌入式系统开发。周元豪,学士,助理工程师,就职于陕西重型汽车有限公司,主要从事汽车嵌入式系统开发。
猜你喜欢
当代水产(2022年6期)2022-06-29
汽车实用技术(2022年7期)2022-04-20
新视线·建筑与电力(2021年2期)2021-09-10
直升机技术(2020年2期)2020-06-16
小资CHIC!ELEGANCE(2019年20期)2019-07-02
新传奇(2018年47期)2018-08-09
中国建筑金属结构(2018年4期)2018-05-23
专用车与零部件(2018年1期)2018-03-25
山东青年(2016年12期)2017-03-02
中学生数理化·八年级物理人教版(2014年2期)2014-04-02