基于MATLABSimlink的半主动悬架系统数学建模
2017-10-17 03:42张亦伟姜再友周伟许生
汽车实用技术 2017年18期
张亦伟,姜再友,周伟,许生
(安徽江淮汽车集团股份有限公司,安徽 合肥 230601)
基于MATLABSimlink的半主动悬架系统数学建模
张亦伟,姜再友,周伟,许生
(安徽江淮汽车集团股份有限公司,安徽 合肥 230601)
文章针对新型的半主动悬架,通过白噪声法建立路面数学模型,利用MATLABSimlink模块搭建道路谱输出模块,最终生成道路谱激励,完成模型的建模,为悬架系统的后续仿真提供可靠的基础和依据。
半主动悬架;MATLABSimlink;白噪声
Abstract:This paper is aimed at the new semi-active suspension, using the white noise method to build the mathematical model of pavement, combine the Matlab/simlink module to buid the road spectrum output, and finally generate the road spectrum excitation, complete the modeling of the model. It provides reliable foundation and basis for future simulation of suspension system.
Keywords: The semi-active suspention; Matab/simlink; White noise
CLC NO.: U463.8 Document Code: A Article ID: 1671-7988 (2017)18-195-03
引言
半主动悬架控制方案中通过改变悬架减振器的阻尼,在不改变悬架弹性元件的刚度的基础上,完成了悬架半主动控制。由于半主动悬架相比较主动悬架,没有气动液压等消耗车辆动力的装置,结构变得简单,在低成本的情况下悬架性能与主动悬架相近,使得其成为最有希望的发展方向。半主动悬架控制器能通过适当的传感器感知汽车行驶过程中的的路面和行驶状态变化,根据内置的控制规律,输出控制信号调节悬架减振器阻尼,其基本结构如图1所示。
1 路面干扰输入
在路面输入方面,路面起伏度一般用路面不平度来描述,它是汽车行进时的主要外激励。路面不平度使汽车在行进中产生振动颠簸和行驶阻力,这会影响零部件的疲劳寿命、汽车行驶平顺性、操纵稳定性等方面的性能。所以,要进行整车振动及其多体动力学的仿真分析与实验研究,关键因素就是要获得准确的道路模型。
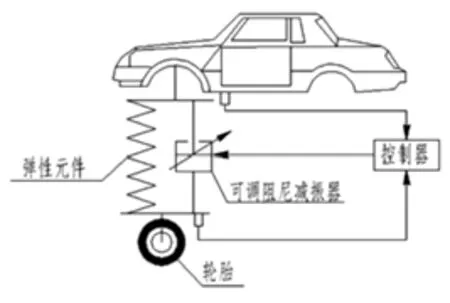
图1 半主动悬架基本结构
路面干扰输入总体上可以分成两类:确定性路面输入冲击与随机路面干扰输入。确定性路面描述比较明确,根据国标它是一个冲击函数,用来模拟实际路况行驶过程时遇到的凹坑或凸起等激励;而随机路面干扰则根据统计学特征,基于频率特性表述的物理量,它假定在在一般性路面工况上行驶时,路面不平所给汽车输入的激励量。当然无论何种干扰,它的能量都取决于路面状况和汽车行驶速度的共同作用。
为了更好的对半主动悬架建模正确的模拟仿真悬架性能,首先要用到地面的随机输入进行输入,才能在后续的时域或频域内对其进行处理。
2 随机路面干扰定义与模拟
一般性的路面激励可看做是一随机过程,功率谱密度用来对其进行统计学意义上的描述。一般而言,路面相对于基准平面的高度z沿道路走向d的变化z(d)称为路面不平度函数或路面纵坡面曲线。通过计算机仿真计算,对路面不平度随机数据(通过实际测量得到)进行频谱分析,从而获得测试路面的功率谱。
图2所示为随机路面干扰下,测试路面相对于基准路面的垂向位移在水平方向上的变化。对于不同的测量路段,要得到两个完全一致的路面不平度函数或者轮廓曲线是很困难的。一般用功率谱函数对其特性进行描述,根据表现形式不同,它可分为有理函数和幂函数两种。这两种函数是构建时域模型的基础,并且具有一致性的特征。
图2 随机路面干扰示意图
描述路面不平度时,随机路面干扰的时域模型,按照功率谱函数角度分析,有白噪声法、PSD离散采样法、谐波叠加法、AR/ARMA法等多种,本文路面的随机激励模型采用白噪声法来建立。白噪声法建立路面数学模型的方法如下所述:
当道路不同时,不同路面会有不同的激励;当道路相同时,但车速不同,汽车受到的激励是肯定不同的。本文通过运用白噪声法建立D级路面的数学模型。白噪声法的基本思想是让一白噪声通过一个成型滤波器来产生随机的激励。路面不平度表示方法采用国际标准化组织在 ISO/TC 108/SC2N67的描述和国内长春汽车研究所定义的《车辆振动输入——路面不平度表示》GB 7031标准,两个文件均建议路面功率谱密度Gq(n)用下式作为拟合表达式:

式中,n为空间频率,等于1/波长λ,表示每米中包括几个波长;n0为参考空间频率;W为频率指数,为双对数坐标上斜线的斜率,它决定路面功率谱密度的频率结构,分级路面谱的频率指数W=2。所以,上式可以写为:

上面只讲了路面不平度不同时的情况,还要考虑不同车速对汽车激励的影响,这里可以将车速u在空间频率谱密度Gq(n)换算为,以时间定义的功率谱函数Gq(f),有:

设截止频率为ω0,则上式变换成:

假设(1)式子是白噪声通过激励悬架系统,系统的会有输出响应,设系统频率的输出响应如下:

(Sω为白噪声信号,设Sω=1)
联立式1、6、7解得:

该线性系统的频率响应函数为:
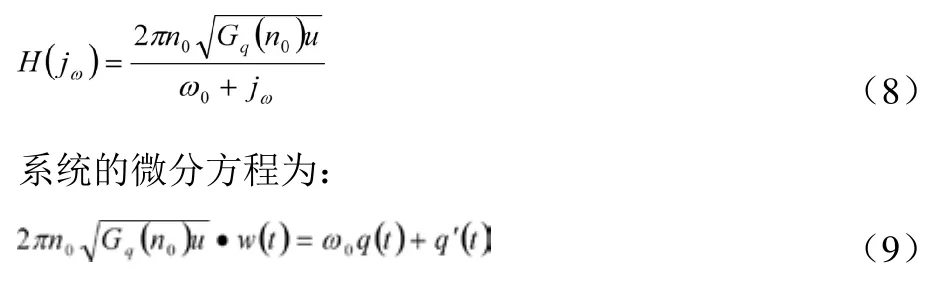
(w(t)为白噪声的时域信号,q(t)为激励,即为路面谱时域信号)
所以,得到路面随机激励模型的状态方程为:

其中:q(t) ----路面随机激励
n0----参考空间频率,n0=0.1m-1
u ----汽车行驶车速,取n=20m/s
Gq(n0) ----路面不平度系数的几何平均值,查表知D级路面为1024×10-16m3
f0----下截止频率,f0=0.0628Hz
w(t) ----白噪声时域信号
基于以上分析,编写 MATLAB函数,仿真随机路谱。部分代码如下:
q2=0;
t=0.005;
%b=wgn(1,2000,0.5)/sqrt(0.005)
b=[3.56518581481412; 23.8666114717210;
-8.57429305989830; 12.8532521365836;
1.96195613487109 ; -3.87890176196077;
-9.19803883120414; 1.37815110086305;
5.77086639602593 ; 2.52116315315951;
5.11122598144808 ; 4.96660961655743;
-1.38619172071334; 12.5328941711971;
3.82139313633067 ; ]
for k=1:2000;
q=2*pi*0.1*sqrt(0.000064*30)*b(k)*t;
q=q+q2;
qq(1,k)=q;
q2=q;
end
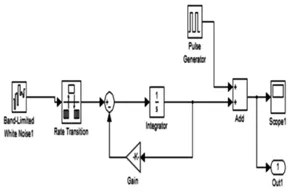
图3 道路模型Simulink仿真模型构造图

图4 随机路面干扰示意图
利用MATLABSimlink模块搭建的道路谱输出模块,用来生成道路谱激励,其模型构建如图3所示。将上面的道路谱模拟函数,在子模型的输出接口上接一个示波器模块,得到此子模型输出的图形如图4所示。
3 小结
本文通过综合考虑模型的准确性、测量方法的局限性,建立了半主动悬架系统动力学模型——车辆二自由度1/4全车模型,并在此基础上推导分析了汽车悬架的状态方程,并进行了路面谱模拟输入,最终应用 MATLAB/Simulink进行了仿真。仿真结果表明,建立的模型,满足预期、符合实际需要。
[1] 黄永安,马路等. MATLAB7.0/Simulink6.0 建模仿真开发与高级工程应用.[M] 清华大学出版社,2005年.
[2] 李颖等.Simulink 动态系统建模与仿真基础.[M]西安电子科技大学出版社,2004 年.
[3] 李晓青.灰色控制理论在汽车半主动悬架控制中的应用[D].武汉:武汉理工大学,2008.
[4] KITCHING K J. Performance of a semi-active damper for heavy vehicles [J]. TransASME J Dynamic Systems,Measurement control,2000,122(9):498-506.
[5] FischerDaniel, IsermannRolf. Mechatronic Semi-activeand Active Vehicle Suspensions[J]. Control Engeering Practice, 2004(12):1353-1367.
[6] 余志生. 汽车理论[ M]. 北京:机械工业出版社, 2000.
[7] 高国生等.汽车悬架控制系统研究动态与展望[J].机械强度,2003,1.
[8] 方子帆等.汽车半主动悬架系统研究进展[J] .重庆大学学报, 2003,1.
Based on the HyperWorks sub-frame strength and modal analysis
Zhang Yiwei, Jiang Zaiyou, Zhou Wei, Xu Sheng
( Anhui jianghuai automobile group co., LTD., Anhui Hefei 230601 )
U463.8 文献标识码:A 文章编号:1671-7988 (2017)18-195-03
10.16638/j.cnki.1671-7988.2017.18.068
张亦伟,就职于安徽江淮汽车集团股份有限公司。
猜你喜欢
电声技术(2022年7期)2022-09-23
广西科技大学学报(2021年1期)2021-03-15
科技视界(2020年24期)2020-08-26
科技视界(2020年22期)2020-08-14
江苏教育·职业教育(2019年5期)2019-07-08
宇航计测技术(2019年1期)2019-03-25
青岛画报(2017年12期)2018-02-06
汽车技术(2017年10期)2017-11-24
科学与财富(2017年12期)2017-05-16
农业知识·百姓新生活(2017年2期)2017-03-07