风力发电机组转子参数测试系统设计
2017-10-24 08:46,,,
电气开关 2017年2期
,,,
(1.广西大学 电气工程学院,广西 南宁 53004;2.国网冀北固安县供电有限公司,河北 廊坊 065500)
风力发电机组转子参数测试系统设计
刘超1,吴华波1,杨萌2,卢祖安1
(1.广西大学 电气工程学院,广西 南宁 53004;2.国网冀北固安县供电有限公司,河北 廊坊 065500)
转子转速及角度是风力发电机机组控制策略中不可或缺的控制参数,这两个参数的测量精度直接影响到系统的控制性能优劣。利用绝对式编码器可以直接读取精确的转子的实时角度信号,但却不能直接获取转子的速度信号,文章以绝对式编码器作为检测元件,以CompactRIO实时控制器作为测控核心,构成转子转速及角度测量单元,设计了一种能同时实现转子转速及角度的测量方法,并编写了相应的测量程序。在风力发电机组动模装置上的使用效果表明:该测量方案达到了预期的设计效果,为风力发电控制系统提供了精准、稳定的控制信号。
绝对式编码器;CompactRIO;LabVIEW;转子参数测量;风力发电
1 引言
风能作为一种无污染的再生能源,对环境危机和能源危机的解决具有重要意义。无论是在实验室对新技术、新理论的先期探究而搭建物理仿真平台中,还是风电系统现场实际应用中,电机转子的转速和角度是机组控制策略中不可或缺的重要控制参数,其测量性能的优劣直接影响整个系统的控制性能。转速和角度的测量方法很多,但能实现两个物理量同时测量的方法鲜有介绍。文献[1]采用一种连续中断的定角测时法(以下简称T法)进行转速的测量,所使用的增量式编码器结构简单、成本低,但它只能给出相对位置增量,而不能检测出轴的绝对位置信息;文献[2]在对比增量式和绝对式编码器优缺点基础上,采用绝对式编码器、通过采集卡和PC 机构建了虚拟测量仪,但只介绍了角度信号的读取方法。本文以绝对式编码器在风力发电机组动模装置中的应用为例,介绍了如何通过虚拟仪器软、硬件读取绝对式编码器的角度信号,同时通过编码器数据线上的脉冲信号巧妙地通过编程实现M/T法对机组的转速的采集。该方案在较宽的转速范围内均能保证足够的精准度,对转速变化范围较大的风力发电机组测控系统的设计与研制具有一定的指导意义。
2 绝对式编码器角度、转速测量原理
绝对值编码器的结构如图1所示,主要由光源、透镜、编码盘、电子处理电路等部件组成。绝对式编码器可以得到所测物体任意时刻所处的具体位置[2],通过读取编码盘上的扇区代码来获得角度坐标,扇区代码的编码方式一般采用格雷码编制。码盘如图2所示,它的特点是在任意两个相邻的扇区之间只有一个数位发生变化,能有效减小误差,提高检测精度。

图1 绝对式编码器结构图
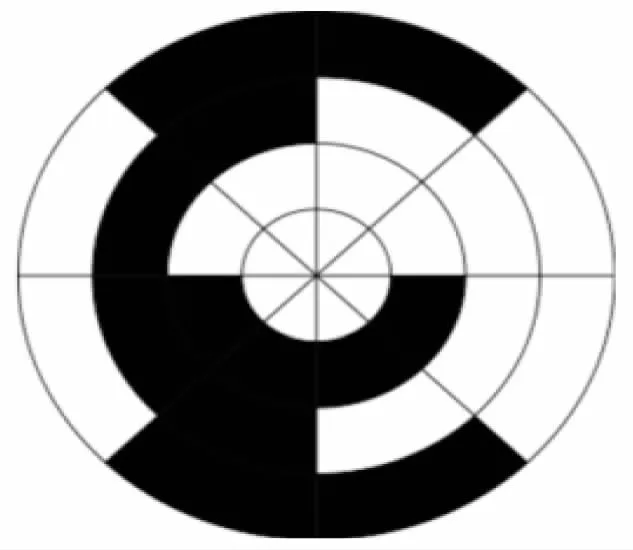
图2 4位格雷码盘示意图
2.1 编码器角度测量原理
为了获取较为精确的实时信号,装置选用12位并行输出模式绝对值式光电编码器来检测直流电机转速和角度信号,通过CompactRIO控制器高速数字信号输入模块对编码器D0~D11上12位数字信号进行采集。由于编码器采用格雷码编码方式,为得到易于理解的十进制数角度信号,可将格雷码转换为二进制码,换算关系如(1)式所示:
D11=G11
D10=D11⊕G10
⋮
D0=D1⊕G0
(1)
式中:⊕代表两个二进制数的相异或。
再将12位二进制代码转换为十进制数,具体方法如下:
编码器为12位并行输出,单圈分辨率为4096,即电机转子旋转一周,CompactRIO主控器采集的12位并行格雷码经二进制码与十进制码转换后,生成4096个脉冲,脉冲的数值为1~4096,两个相邻脉冲之间的角度之差为360/4096=0.08789°,最后将脉冲数值与这个角度差相乘即可得到转子角度。测量精度能够满足风电系统的要求。
2.2 转速测量原理
编码器D0~D11每一根数据线上输出的是频率与转速成正比的均匀脉冲信号,因此可以选取任意一根数据线作为检测信号对转速进行测量,本文选择了数据线D11作为检测对象。常用的测速方法主要有定时测角法(M法)、定角测时法(T法)以及M/T法等三种。 M法是指在规定的时间间隔T内,对数据线上的脉冲进行计数来获取被测速度值,这种方法低速时误差较大,适用于高速情况下的测量;T法测量通过测量数据线上两个脉冲之间的时间间隔来确定被测转速的方法,该方法在转速较低情况下应用。M/T法是综合M法和T法改进得到,通过同时获取检测时间和该段时间内的编码器脉冲数来获得速度值[3],该方法可以在很大转速范围内实现高精度的测量。鉴于风力发电机组工作在较宽的转速范围内,因此本文采用M/T法对发电机组的转速进行测量。
M/T法转速测量原理如图3及图5所示,首先以CompactRIO上频率为fc板载时钟信号PT作为计时脉冲,当第一个时钟信号脉冲到来时启动对D11数据线上脉冲Pm的计数,并于第m2个时钟信号脉冲到来时(此时对应的时间为T)停止并返回数据线上检测到的脉冲数m1,然后根据检测到的数值计算得到机组当前转速,具体计算方法如下:
检测时间T可由式(2)计算得到。

(2)
假设电机每转一圈D11数据线发出P个脉冲,则可由式(3)计算得到时间T内转子的角位移:

(3)
转子实际转速可由式(4)计算得到:

(4)
将式(2)、(3)带入式(4)得式(5)所示的被测转速计算公式:
(5)

图3 M/T测速法
3 风力发电机组动模装置转速测量部分硬件结构
图4所示为本文所介绍的风力发电机组动模装置转速测量部分硬件结构图。编码器与被测机组同轴连接,角度信号以12并行格雷码的经电平转换电路后送到CompactRIO控制器的高速数字输入模块,经计算后得出机组当前的转速与角度值,供风力机及发电机控制系统使用。

图4 测量装置结构图
3.1 CompactRIO实时控制器
CompactRIO是一款坚固耐用、可重配置的嵌入式控制器,主要由实时控制器、现场可编程门阵列(FPGA)和工业级I/O模块三个部分组成。作为风力发电机组动模装置的控制核心,CompactRIO集成了FPGA、高速双向数字I/O模块、模拟量采集模块于一体的嵌入式实时控制器。本文介绍的测速部分,占用了控制器的12位高速数字I/O口,通过对FPGA编程即可实现编码器信号的高速采集。
3.2 编码器及其输出信号调理
选用的12位绝对式编码器的工作电压为10~30Vdc,采用并行推挽输出,适用于NPN、PNP等信号类型。由于CompactRIO控制器的开关量模块输入电平为0~3.5V,与编码器输出不匹配,因此在编码器与CompactRIO控制器之间需要增加一个电平转换电路。
4 程序设计
CompactRIO控制器的编程由虚拟仪器软件LabVIEW实现,根据对各测测控环节对实时性要求的不同,控制器可按FPGA模式—FPGA VI、实时模式—RT VI、主机模式—Host VI三种开发模式进行编程。其中,FPGA模式的程序在FPGA内部运行,为实时性最高的模式。鉴于风力发电机组转子转速和角度信号的测量精度与实时性是影响到整个动模系统的控制性能的关键性变量,因此这部分程序采用FPGA VI模式进行编程。根据上述角度及转速测量原理得图5所示流程图。

图5 编码器程序流程图
4.1 角度及转速信号的检测程序
编码器角度及转速信号测量程序如图6所示。为保证电机保持高速运转时信号检测的准确性与实时性,在图6(a)所示的信号采集程序中,采样时间设置为20ns。程序在FPGA模式下访问I/O口,采集到的12位格雷码经捆绑后可以布尔簇的形式在前面板显示,然后根据式(1)将格雷码信号转换为二进制码。
图6(b)为脉冲计时程序,在Pm信号的上升沿,计算上次上升沿到本次上升沿之间的时间间隔。两次上升沿之间的时间间隔就是一个完整的脉冲周期。由于程序中所配置的FPGA板载时钟为40MHz,即每个时钟脉冲周期25ns,把在一个Pm信号周期内产生的时钟脉冲信号的个数存储在PT中,以此在角度,转速计算程序中得出Pm的脉冲周期的数值为25PTns。
图6(c)为角度,转速计算程序,根据上文介绍的二进制转化为十进制的具体方法求出转子的输出角度。由于Pm是编码器D11数据线上的脉冲信号,在该信号每周期内电机转子转过角度为60°,同时得出Pm的脉冲周期的数值为25PTns,最后根据公式(4)便可以算出转速。

图6 转子参数测量程序
由于CompactRIO板载的FPGA资源有限,风力发电机机组的控制功能一般在RT VI中进行,图7显示了如何利用DMA FIFO(直接访问先进先出模块)将上述FPGA程序所输出的转子角度及转速值传送至RT VI。

图7 RT VI读取DMA FIFO中的数据
5 测试
5.1 转子角度
为验证系统的角度测量的线性度和准确性,对采集到的角度信息利用Labview软件在计算机后台进行了图形化以及数字化显示,图8为不同转速下的角度测量输出波形。

图8 不同转速时转子角度的实测波形
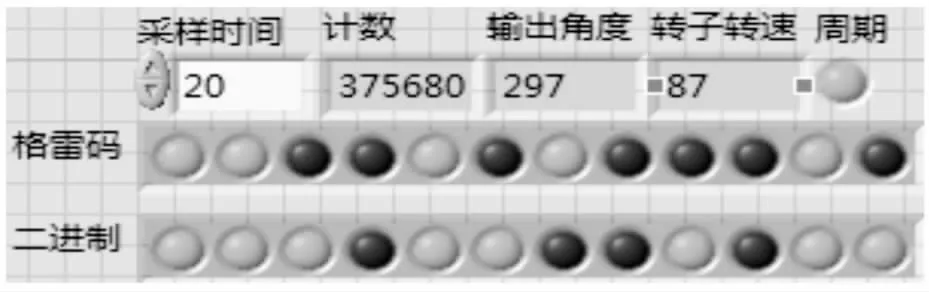
图9 角度显示界面
图8(a)、(b)、(c)分别为1500r/min、1000r/min、800r/min时,转子角度的实时波形。横轴为时间参量,纵轴为角度参量。可以看到,转子每转一圈为一周期,图形显示数值变化为-1~1,角度实际变化范围为0°~360°。输出的曲线呈锯齿波。由图9可知,系统能够实时监测编码器的角度,同时以排灯的形式显示角度的格雷码和二进制码。角度的波形显示和数字显示两者之间相互验证,保证角度测量的准确性和精度。系统的实时性好;显示直观;读取简单;实用性强。
5.2 转速测试
为检验速度测量的精度,采用一个精度为0.02级的转速测量仪作为标准仪表对本方法在不同转速下的测量结果进行校核。因设计的风电动模装置中直流电动机与风力发电机之间采用直驱型连接,所以测量选取的转速范围能够满足直流电动机进行不同风速条件下风力机的模拟。测量结果如表1所示。测量结果比对表明,该测量方法达到了较高的精度,可满足风力发电机组测控系统要求。

表1 转速测量结果
6 结语
本文在分析绝对式编码器角度、转速测量原理的基础上,采用M/T法设计了基于虚拟仪器和绝对式编码器的转速、角度测量方案。风力发电机组动模装置的实验数据表明:在机组低速和高速段的测量数据均有较高的线性度和精准度,可满足风电系统对电机转速及角度的测控要求。
[1] 文晓燕,郑琼林,韦克康,等.增量式编码器测速的典型问题分析及应对策略[J].电工技术学报,2012(2):185-189.
[2] 张力.LabVIEW环境下的绝对式编码器角度测量仪的设计[J].三峡大学学报,2008,30(3):67-69.
[3] 李茂亮,高敬贝,贾仁松,等.基于虚拟仪器技术的电机转速测控系统设计[J].电机与控制应用,2010,37(7):21-23.
[4] 申凌云,苏艳斌,郭发付,等.绝对值编码器在干熄焦提升机中的应用[J].自动化应用,2014(9).44-46.
[5] 邓建,林桦.基于DSP的绝对式光电编码器的电机转速测量[J].电机与控制应用,2010,(1):50-52.
[6] 王永高.基于LabVIEW的发动机轴功率测量虚拟仪器系统开发[D].大连理工大学,2006.
[7] 郑卫,张波,刘品宽.基于FPGA准绝对值编码器的角度测量系统的设计[J].测控技术,2012(6):50-55.
DesignofRotorData′sMeasuringSysteminWindPowerGeneration
LIUChao1,WUHua-bo1,YANGMeng2,LUZu-an1
(1.College of Electrical Engineering,Guangxi University,Nanning,53004,China;2.Guan Branch of State Grid Jibei Electric Power Company,Langfang,065500,China)
In the control strategy of the wind turbine,rotor speed and angle are indispensable control parameters,the measurement accuracy of these two parameters directly affect the control performance of the system.For most of the design can only measure the angle hardly to realize the shortcomings of the rotor speed measurement,the rotor speed and angle measurement unit is set up by absolute encoder which as the detection element and CompactRIO real-time controller which as control core.Based on labVIEW FPGA designs a new method and corresponding measurement program about the rotor speed and angle measurement.The results show that:the device can achieve stable and accuracy measurement and can be conveniently used in the study of wind power generation.
absolute encoder;CompactRIO;LabVIEW;measuring rotor data;wind power generation
1004-289X(2017)02-0082-05
TM614
B
2016-03-07
刘超(1989-),男,山东日照人,硕士研究生,从事风电利用技术的研究工作;吴华波(1992-),男,江西赣州人,硕士研究生,从事风电利用技术的研究工作。
猜你喜欢
山东冶金(2022年4期)2022-09-14
成都信息工程大学学报(2018年3期)2018-08-29
消费者报道(2018年4期)2018-07-31
制造技术与机床(2017年7期)2018-01-19
通信电源技术(2016年4期)2016-04-04
焊接(2016年7期)2016-02-27
电子器件(2015年5期)2015-12-29
发明与创新·中学生(2015年2期)2015-05-13
新疆钢铁(2015年3期)2015-02-20
电测与仪表(2014年13期)2014-04-04