
A*算法的规模控制与代码实现
2017-10-26 11:22蒋晓南
电脑知识与技术 2017年22期
蒋晓南

摘要:A*算法是一种在静态路网中求解最短路径的最有效的方法,它是启发式搜索中最具代表性的一种,目前被广泛应用在机器人、自动控制、游戏等多个AI领域。然而A*算法会随着搜索规模的扩大而迅速降低搜索效率,所以有效控制A*搜索的规模才能让它适应更多场合。
关键词:A*算法;规模控制
中图分类号:TP393 文献标识码:A 文章编号:1009-3044(2017)22-0187-03
1概述
A*算法是一种在静态路网中求解最短路径最有效的方法。公式表示为:f(n)=g(n)+h(n),其中f(n)是从起点经由节点n到达终点的估价函数,g(n)是在状态空间中从起始节点到n节点的实际代价,h(n)是从n节点到目标节点的最佳路径的估计代价。能否找到最短路径的关键在于估价函数h(n)的选取,如果估价函数h(n)的值小于等于n到目标节点的距离实际值,这种情况下,搜索的点数多,搜索范围大,效率低,但能得到最优解。如果估价函数h(11)的值大于n到目标节点的距离实际值,这种情况下,搜索的点数少,搜索范围小,效率高,但不能保证得到最优解。
通过上段对A*算法的描述,可知A*算法会随着搜索规模的扩大而迅速降低搜索效率,只有有效控制A*搜索的规模才能让它适应更多场合。本文会首先介绍A*算法的基本思想,接着在讨论如何控制A*算法的规模,最后通过JAVA进行代码实现。
2A*算法的基本思想
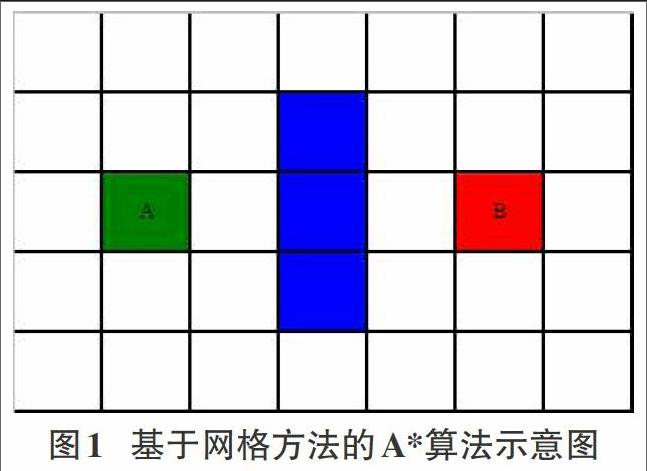
A*算法通常会将搜索区域分割成大小相同的网格,这是对搜索区域进行的有效简化。这样搜索区域就可以用一个简单的二维数组进行表示,数组中的一个元素就代表方格网中的一个方格。另外每个方格都必须被定义一个通过可能性的阀值,表示这个方格能否通过。接着,需要做的就是搜索从A到B需要经过的最短方格路径。如图1,左侧阴影方格A为起点,右侧阴影方格B为终点,中间三个阴影方格为障碍物。
A*算法的搜索过程依赖于“路径代价值”的估算,“路径代价值”的计算公式就是绪论中提到的:f(n)=g(n)+h(n),这里简单记为:F=G+H。
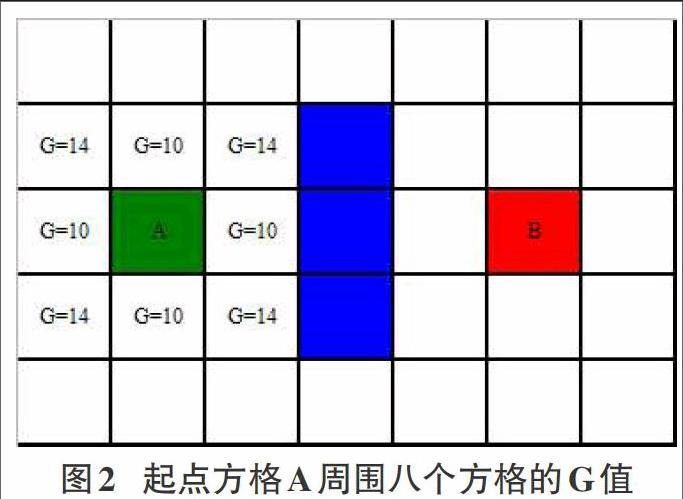
假定每次水平移动和竖直移动的代价为10,根据勾股定理,对角线的长度是两个直角边平方和的2次方根,因此对角的移动代价为14.14。为了简单起见,本文使用10和14。
G是从起点A移动到给定方格的实际移动代价值。计算给定方格G值的方法是,用其移动路线中前一个方格的G值加上10或者14,分别对应水平竖直移动和对角线移动。那么,前一个方格的G值如何计算呢?不用担心,因为不断往前延伸,总会找到起点,而起点的G值是0。图2为起点方格A周围八个方格的G值。
H是从给定方格移动到终点B的预估移动代价值。之所以称为“预估”,是因为这只是一个猜测,它不考虑移动中可能遇到的障碍,只计算从给定方格水平或竖直移动到终点经过的方格总数,并忽略对角移动和障碍物,然后将方格总数乘上水平或竖直移动一格的代价值10,以得到H值。图3为起点方格A周围八个方格的H值。
F是从起点经由给定方格到达终点的综合代价值,即G和H的简单相加。图4为起点方格A周围八个方格的G、H、F值。
接下来A*算法会通过对F和G值的判断找到最短路径,但由于A*搜索过程复杂,本文不在这里赘述。
从图中不难看出,如果想让搜索到的路径更加精确,必须将方格划分的更小。然而这样一来方格数量就会激增,从而增加A*搜索的规模,降低搜索效率。那么,如何才能在满足应用要求的情况下,降低搜索规模呢,这是本文下面要讨论的内容。
3A*算法規模控制
实际应用中,目标往往只出现在某些固定的点,不会毫无规律;又或是应用本身对精度要求并不高,只需要找到目标所在区域即可。基于这样的思路,作者提出两个降低搜索规模的可行方案。
如图5所示,传统方法会将搜索区域进行这样的划分,并进行A*搜索。本文下面以这张图举例分析如何降低搜索规模。
节点网:
如图6所示,如果目标只会出现在图中小圆点位置,那完全没有必要将图划分成那么多方格,只要将节点连接起来形成一张节点网,就可以使用A*算法找到这些点之间的最短连接路径。
节点网和传统网格方法的本质是一样的,它们都是对算法难以操作的状态空间进行简化,但是节点网比传统网格方法存储代价低得多,但缺点是不能很好地适应动态障碍。对于这个问题,较好的解决方法是在节点网中融合进避障系统,利用避障系统来对付移动障碍,利用节点网来实现在地图中的常规穿行,这样即使在常规行进的路线上出现障碍物,壁障系统也能帮忙躲开它。
区域网:
如图7所示,搜索区域被划分成几个多边形区域,如果对搜索精度要求不高,只需要确定目标在某个区域,那么就可以使用这种区域网。设计时可以把多边形区域的中心点作为节点,从而形成节点网。
区域网具有节点网的大多数优点,而且更加节省存储空间,但必须使用避障系统,而且如果构建区域网的方法本身不够智能,那么就会出现一些看起来非常奇怪的路径。
避障系统:
本文前面提到的避障系统,是一种利用磁铁同性相斥原理设计出来的避开障碍物的系统。
简单得说,就是当探路者根据A*算法搜索出来的最佳路径行进时,突然遇到移动障碍物,或是因为路径计算不够精确而与障碍物有碰擦的危险,就对探路者施加一个反作用力,距离越近反作用力越强,好像同极性的两块磁铁,以此来避开障碍物。有了它,节点网和区域网就有了用武之地。
4代码实现
由于本设计是用JAVA语言进行程序实现与测试,因此以下给出的均为JAVA源代码。
节点网和区域网中都牵涉到节点问题,所以节点的设计尤为关键。
以下是“节点”类的成员变量和重要成员函数:
classNode{
private Node parentNode;//父节点,此变量非常重要,是获得最佳路径的线索
private Stringid;//为了便于测试,加人一个节点id,作为将来的输出显示
private boolean attainability;//节点是否可通过
private int X,Y;//节点的位置信息
private int G;//当前点到起点的移动耗费
private int H;//当前点到终点的移动耗费
privateint F;//f=g+h
public Node[]getNeighborNodes(Node[][]map){…}//获得周围节点
publicintgetNeighborNodeCostG(Node neighborNode){…}//获得相邻节点G值
public void costGHF(Node endNode){…}//计算当前节点GHF值
getNeighborNodes函数用于获得当前节点周围的节点,并自动给无效的节点作出标记(即给无效节点赋值null)。入口参数为一个Node类型的二维数组,返回一个Node类型的一维数组。
getNeighborNodeCostG函数用于获得当前节点的相邻节点的G值。人口参数为一个相邻节点,返回一个整型的G值。
costGHF函数用于计算当前节点的GHF值。入口参数为A*搜索的终点,无返回类型。
以下是“寻路”类的成员变量和重要成员函数:
public class PathFinding{
private intnodeMapRow;//节点地图行数
private intnodeMapColumn;//节点地图列数
private Node[][]nodeMap;//地图数组
private Node startNode;//起点
private Node endNode;//终点
private Stack open;//开启列表
private Stack close;//关闭列表
private Node getMinCostNode(Stack s){…}//获得最小代价节点
private void Astar(){…}//A*算法
public
Stack
getPath(intstartX,intstartY,intendX,intendY){…}//获得最佳路径
public
void printPathontstartX,intstartY,intendX,intendY){…}//打印最佳路径
getMinCostNode函数用于从提供的开放列表中获得最小代价值节点,同时将其从开放列表中删除。函数入口参数为一个堆栈类型的开放列表,返回一个最小代价的节点。
Astar函数用于A*搜索,是本文最核心的函数之一。此函数既无人口参数也无返回类型,原因在于很多准备工作已在其他类和函数中完成。
getPath函数用于获得A*算法搜索出的路径节点。入口参数为起点和终点的X、Y坐标,返回的路径节点用堆栈存储。
printPath函数用于打印getPath获得的最佳路径。入口参数为起点和终点的X、Y坐标,无返回类型。此函数在A*搜索中并不起任何作用,只是为了测试A*搜索而编写的。
5结论
测试结果:
图8和图9,是使用本设计之前和之后针对同一个搜素区域进行1000次循环搜索的对比。采用本设计后的搜索时间只有传统方式的1/5,显然大大缩减了搜索时间,提高了搜索效率。需要指出的是,本设計虽然有效降低的搜索规模,但并非适用于所有场合。至于所适用的场合在前文中已有讨论,不在此赘述。
猜你喜欢
数学小灵通(1-2年级)(2021年12期)2021-12-30
数学小灵通(1-2年级)(2020年12期)2021-01-14
动漫界·幼教365(中班)(2020年3期)2020-04-20
铁道通信信号(2020年9期)2020-02-06
小学生导刊(2018年16期)2018-11-30
小学生学习指导(低年级)(2018年10期)2018-10-13
音乐天地(音乐创作版)(2018年2期)2018-05-21
小学生导刊(2018年1期)2018-03-15
小学生作文(中高年级适用)(2017年3期)2017-07-07
城市道桥与防洪(2014年5期)2014-02-27
