
基于侧向光电圆弧阵列的温室路沿检测与导航方法
2017-11-01 23:07刘继展李萍萍
农业工程学报 2017年18期
居 锦,刘继展,李 男,李萍萍
基于侧向光电圆弧阵列的温室路沿检测与导航方法
居 锦1,刘继展1※,李 男1,李萍萍2
(1. 现代农业装备与技术教育部重点实验室(江苏大学),镇江 212013;2. 南京林业大学森林资源与环境学院,南京 210037)
针对现有温室移动机器人沿边导航技术的精度与实时性不足等问题,提出了一种基于光电开关圆弧阵列的沿边导航方法。提出了基于圆弧阵列理想目标带原理的位姿检测与调控方法,并建立了基于光电圆弧阵列信号触发数与触发中心序号双指标的位姿检测模型,按照双指标的不同阈值进行车体位姿状态归类并触发相应调控轨迹程序,进而根据由该双指标数值计算得到的位姿给定各调控轨迹参数,实现实时的沿边导航。试验结果表明,在0.15 m/s速度内,小车的沿边位置与姿态偏差分别保持在-35 mm~+15 mm和-5°~+5°范围内,能够满足实际施药、搬运等作业的行走需求。同时小车的调控周期约为2 m,实现了温室内低调控频度的沿边平顺导航,并且沿下沉路沿行走时,能够适应300 mm长的杂物。该方法为温室环境下的低成本快速沿边导航提供了新的技术思路。
导航;温室;监测;光电开关;圆弧阵列;沿边;位姿
0 引 言
近二十年来中国设施农业发展迅猛,总面积已超过400万hm2,占全球的85%。在温室环境下,频繁地搬运、施药、移栽、收获等大量移动作业均急需适应温室环境的移动平台,而具备导航能力的各类温室自主移动平台研究亦得到了高度重视[1-5]。
适应温室环境的导航技术是实现自主移动平台研发和高效移动作业的关键,其中利用温室内的道路边沿特征进行导航是研究的主要方向之一。基于环境图像信息提取道路边沿的车辆导航方法已开展了大量研究[6-15],但该类方法算法较为复杂且易受复杂的温室非结构环境和半自然条件干扰,距离实际生产应用仍有一定距离。相对更简单的基于距离或接近信息的边沿检测已在扫地机器人等诸多领域得到应用,但简单基于机械、红外光电或超声的距离或碰撞感知仅能实现边沿的防碰撞或防跌落控制[16-17],而难以精确地确定自身与边沿的相对位置和姿态,因而无法满足温室内准确沿边快速行进的需要;在基于距离感知的车辆沿边导航方面,贾士伟等[18]基于激光扫描测距的二维深度信息实现温室道路边沿检测,但其算法仅能处理温室道路相对平坦的情形,而对于温室道路两侧有平缓坡度以及有凹凸不平障碍物的情况适应能力较差;周慧等[19-20]通过在车辆沿边一侧安装一个超声或红外光电传感器对墙体进行测距实现沿边行走,但无法实现对车身相对墙体倾斜状态的判断,因而无法避免车头或车尾与墙体的碰撞,难以保证安全可靠和平顺快速的沿边行进;袁宇龙等[21]通过在AS-R移动机器人侧前方弧形布置多个距离传感器、徐明亮等[22]在Khepera移动机器人前方弧形布置多个距离传感器对墙体进行测距,进而通过多个距离信号的模糊逻辑融合等来实现沿边行走,但模糊逻辑融合的计算复杂,试验结果表明行走姿态不够稳定;杜利超等[23]则通过在车辆侧面平行直线安装若干个光电开关实现沿边行进,但只能通过不同光电开关的高低电平制定判断规则来了解车身偏离边沿的大致情况,而无法获得车身相对于边沿的具体位置和姿态,因而难以保证沿边导航的良好精度和运行平滑性。
本文针对温室内垄间、槽间沿边导航的需要和现有研究的不足,提出了基于侧向光电圆弧阵列的温室路沿检测与导航方法,通过7关电开关的“0、1”信号规律实现了车辆相对边沿的位置和姿态准确检测和沿边导航,并进行了试验验证。
1 小车沿边运动模型
1.1 两轮差速小车的运动学模型
如图1,本研究以转弯半径小、控制简单等优点的两轮差速小车作为研究对象,以向量描述其任一时刻的位姿[24]。
(,,)T(1)
式中为自主小车中心的纵向坐标,mm;为自主小车中心的横向坐标,mm;为自主小车的航向角,(°);并以向量描述小车任一时刻的速度:
=(,)T(2)
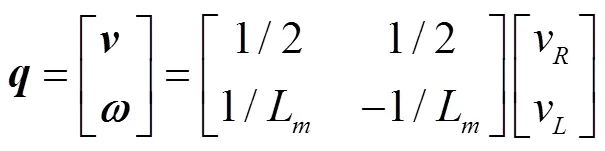
式中为两轮中点沿车体纵向的瞬时速度,mm/s;为小车的瞬时角速度,rad/s。
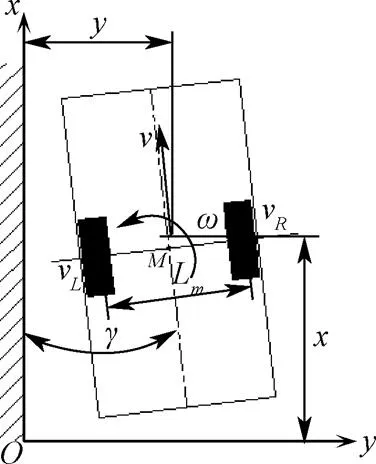
注:vL左轮轮速;vR右轮轮速;v小车速度;x小车中心纵向坐标;y小车中心与路沿距离;γ航向角;Lm轮距;ω小车角速度;M小车中心转矩。下同。
忽略小车行走时轮胎与地面之间的滑动摩擦,则有
其中,
v=ωR(4)
v=ωR(5)
由式(3)、(4)、(5)可得
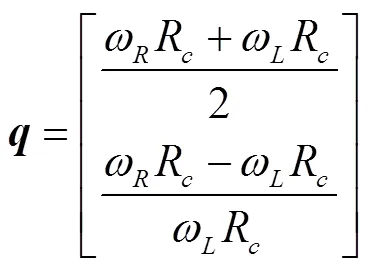
式中v、v分别为左、右驱动轮的线速度,mm/s;ω、ω分别为左右驱动轮的角速度,rad/s;L为小车驱动轮的轮距,mm;R为小车驱动轮行驶半径,mm。
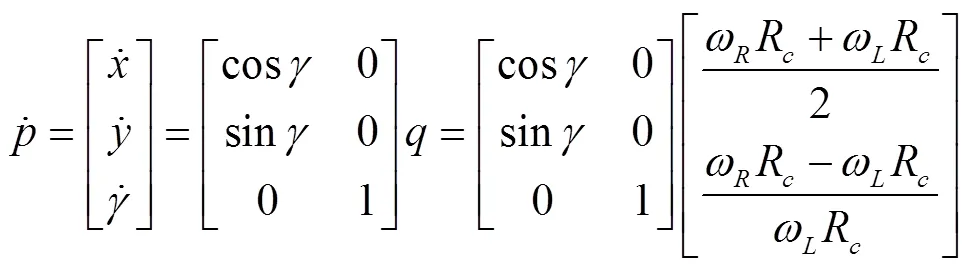
则小车的运动学方程,可由式(7)表示[25-29]。
1.2 小车沿边模型分析
小车在沿边行驶时,除拐角、急弯等极少情况外,在导航计算区域内道路边沿相对于车体可近似为直线,小车相对于道路边沿的位姿=(,,)T可简化为由小车中心点相对于路沿的横向位移与航向角来表示:
=(,)T(8)
由式(7)、(8)联立,可得

式中0为小车的初始位姿,R、L由小车自身固定结构参数决定。
由式(9)可以发现,小车的位姿取决于上一时刻的航向角和小车左右轮速ω、ω,因而航向角的准确检测是实现车体位姿控制和沿边导航的前提,而沿边导航控制必须由小车的左右轮速ω、ω调节来实现。
2 光电开关圆弧阵列的沿边位姿检测与导航模型
2.1 多光电开关的道路边沿检测原理
规范化建设的温室内具有垄间、槽间、立体栽培装置间的边沿型通道,根据道路与边沿的几何关系可分为下沉路沿和凸起路沿(图2)。
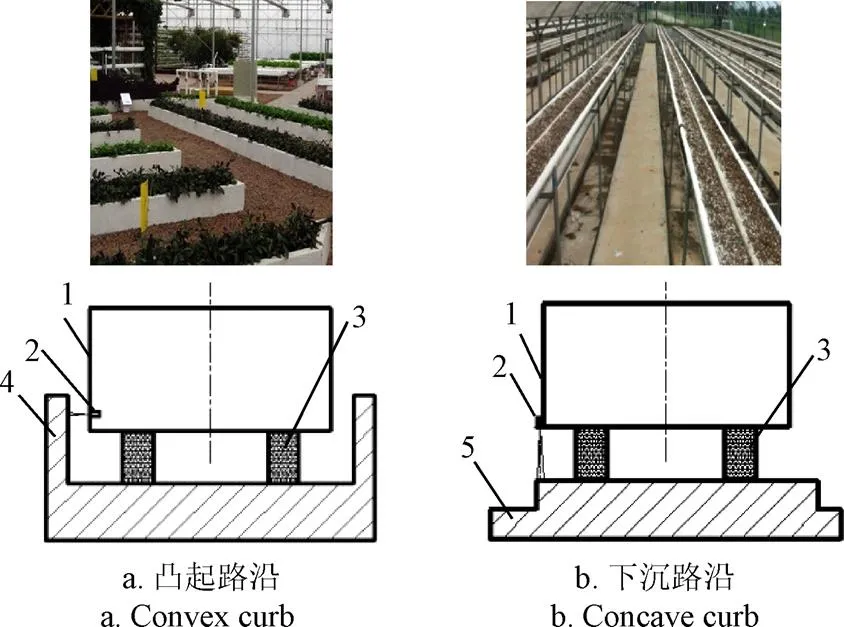
1.小车 2.光电开关 3.车轮 4.凸起路沿 5.下沉路沿
当路沿处于检测范围内时,在车体侧面布置的光电开关会相应地输出一个设定的低电平或高电平信号,但单个光电开关只能获得车体安装点相对于路沿的位置,无法获得车体姿态信息。
通过在车体侧面以一定结构布置多个光电开关,其产生的各高低电平信号包含了车体相对于路沿的距离与偏转姿态信息,从而实现简单可靠性的温室边沿检测和导航。
2.2 基于光电开关圆弧阵列的车体位姿获取
2.2.1 光电开关圆弧阵列的布置
为实现小车位置、姿态的准确反馈,提出了车体侧面的光电开关圆弧阵列布置方法。
如图3所示,在自主小车的沿边一侧,7个光电开关1~7按圆弧均匀布置构成弧形阵列,并由光电开关的量程决定各检测点′1~′7分布决定一检测圆弧。两相邻光电开关检测点间的夹角为

2.2.2 七光电开关圆弧阵列的位姿检测原理
沿边导航的目标是控制车体始终在与路沿处于相对稳定的位姿范围内平顺行进,为此根据光电开关圆弧阵列结构,将检测点′2′6和′3′5两连线之间形成的宽度带作为位姿理想目标带(图3),当路沿处于理想目标带内时,小车处于沿边的理想位姿而不需调节。当路沿跨出理想目标带时,将导致光电开关圆弧阵列的高、低电平状态发生变化,根据各光电开关的高低电平状态规律可判断小车位姿进而完成沿边行进的调控。
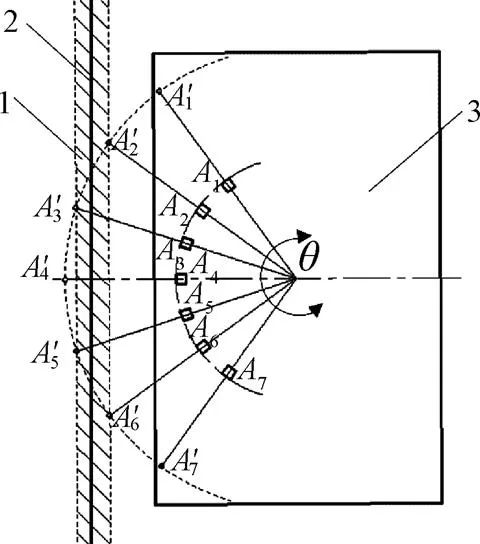
1.理想目标带 2.道路边沿 2.小车
1.Ideal control target area 2.Curb 3.Vehicle
注:1~7光电开关;′1~′7光电开关的检测点;光电开关圆弧阵列的圆心角。下同。
Note:1-7are photoelectric switches;′1-′7are detection points of photoelectric switches;is central angle of arc array of photoelectric switches. The same as below.
图3 光电开关圆弧阵列布置示意图
Fig.3 Schematic diagram of arc array for photoelectric switches
2.2.3 七光电开关圆弧阵列的位姿检测指标
为了从圆弧阵列中多个高低电平信号判断小车的位姿状态,引入信号触发数N和触发中心序号N两个位姿检测参数。
1)N表示检测到路沿而被触发的光电开关的数量(图4),N越大表明车辆距离路沿越近;
2)N为检测到路沿而被触发的的光电开关的序号的平均值(图4),N越大表明车辆的头部越偏离路沿。
控制程序通过对各光电开关高低电平信号的信号触发数N和触发中心序号N的自动计算和数值分析,可实现对车体沿边位姿的判定。
2.2.4车体沿边位姿状态判定
由图4可知,当车辆边沿位于理想目标带内时,信号触发数N=3且触发中心序号N=4,车辆与路沿处于理想位姿状态。当路沿跨出理想目标带时,导致N和N发生变化,根据七光电开关圆弧阵列布局的检测范围和位姿控制精度需要,首先按照N和N的不同阈值进行车体位姿状态归类,从而触发控制系统调用对应的调控轨迹程序;进而根据由N和N数值计算得到的准确位姿给定各调控轨迹参数,实现实时的沿边导航。
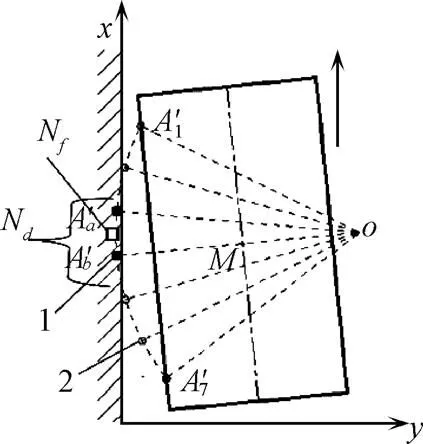
1.触发的光电开关检测点 2.未触发的光电开关检测点
1.Triggered detection point 2.Detection point not triggered
注:′~′被触发的关电开关检测点;N被触发光电开关数量;N被触发光电开关序号均值。
Note:′-′are triggered detection points of photoelectric switches;Nis number of triggered photoelectric switches;Nis center sequence number of triggered photoelectric switches.
图4 位姿检测指标示意图
Fig.4 Sketch diagram of position and orientation detection indexes
当N=0时,车辆已经远离路沿,处于导航失效的不可控状态;而当N>5时,车辆已经快越过路沿,处于沿边导航失效的不可控状态(图5a)。
同时,当N≤2或N≥6时,车辆相对路沿已经严重倾斜,处于沿边导航失效的不可控状态(图5b)。
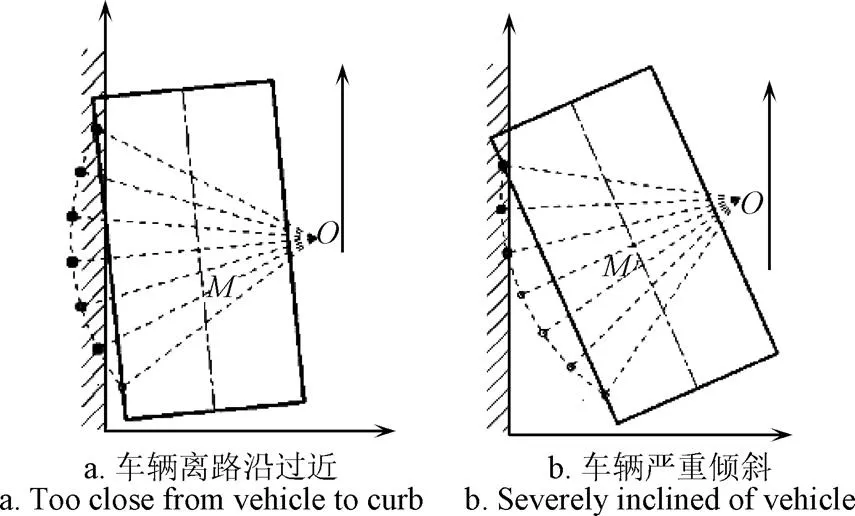
图5 导航失效状态示意图
因此在导航有效范围内,将车体位姿分为9种状态(表1),其中为理想位姿状态,当处于其他状态时即启动对应调控程序向理想位姿状态调节。
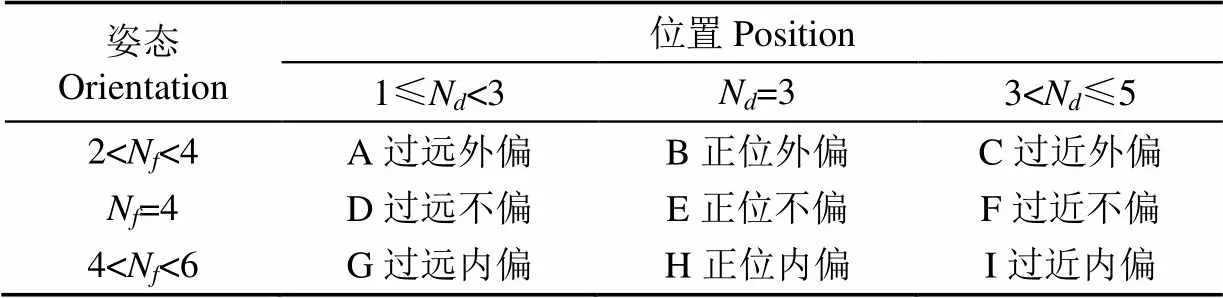
表1 小车位姿状态
2.2.5 车体沿边位姿偏差计算
小车在沿边导航过程中,根据图1和4所示几何关系,由七光电开关圆弧阵列所检测出的车辆的姿态偏差为
其中Δ为正表示车辆头部偏向路沿;Δ为负表示车辆头部偏离路沿。
同时根据图1和图4所示几何关系,由七光电开关圆弧阵列所检测出的车辆的位置偏差为

2.3 光电开关圆弧阵列布置要求
由式(11)、式(12)可知,由光电开关圆弧阵列所检测出的位姿偏差精度与布置圆弧的圆心角和半径相关,而参数由位姿的检测精度要求和系统响应时间所共同决定。
2.3.1 位姿的检测精度要求
由式(12),七光电开关圆弧阵列的位置检测误差为
其中[]为车辆沿边导航中对七光电开关圆弧阵列的位置检测误差要求。当在表1所示有效调控范围内,N为最大值5时
由式(11),七光电开关圆弧阵列的姿态检测误差为
其中[]为车辆沿边导航中对七光电开关圆弧阵列的姿态检测误差要求。
2.3.2 系统响应时间要求
同时,相邻光电开关的触发间隔必须满足系统响应时间要求,才能有效反映车辆对路沿的位姿变化
其中0为车辆沿边行进中可能出现的最大偏转角速度,为系统从光电开关触发到车轮作出响应的时间。
在进行光电开关圆弧阵列布置时,首先可由式(15)和式(16)确定七光电开关圆弧阵列的检测圆弧的圆心角
60<<6[] (17)
进而由式(17)和式(14)可确定七光电开关圆弧阵列的检测圆弧半径。
2.4 不同位姿的差速调控
针对表1所示小车9种不同位姿状态,当路沿跨出理想目标带时,依照图6所示分类轨迹模式进行调节[30]。
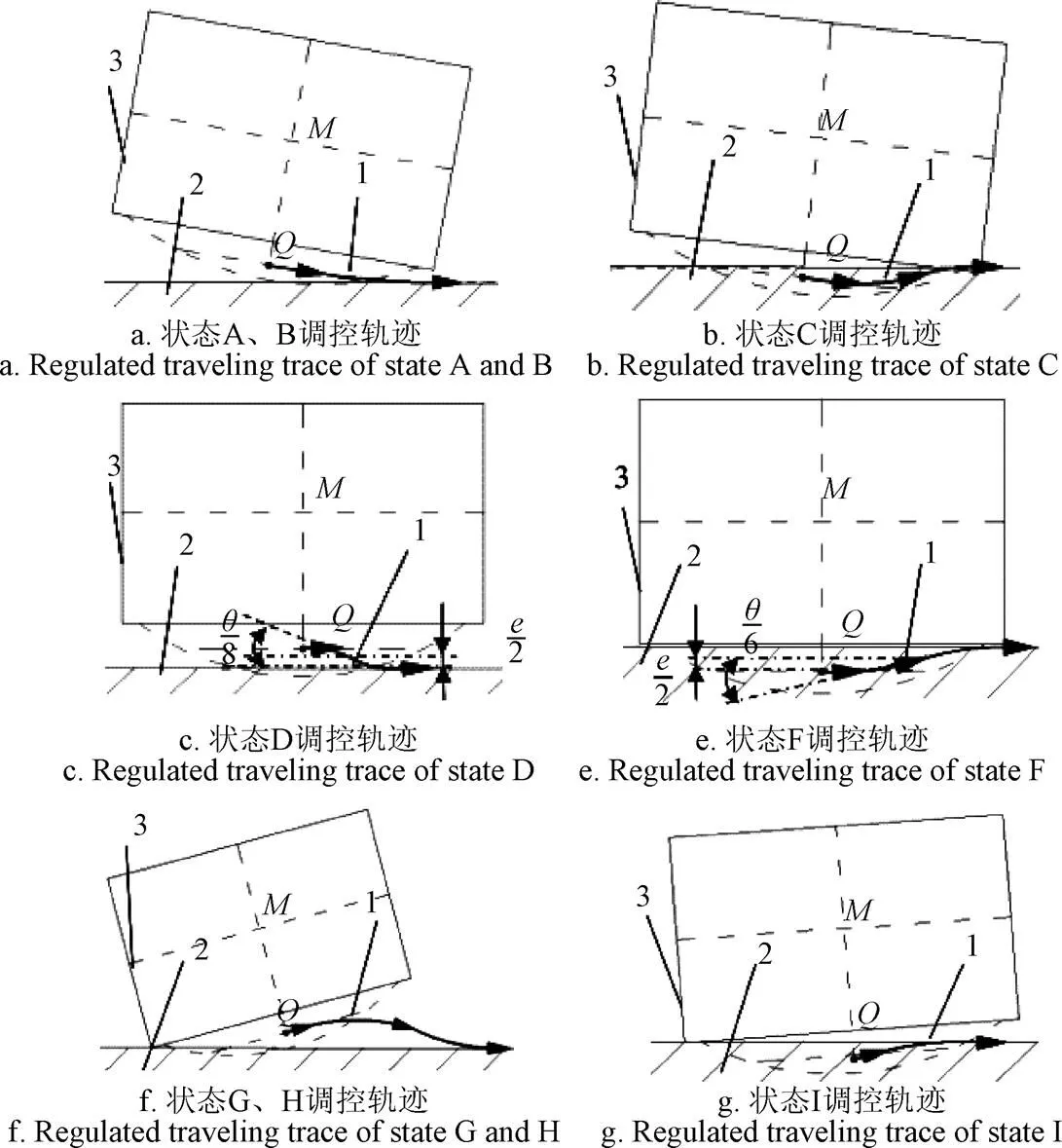
1.行驶轨迹 2.路沿 3.小车
1. Traveling trace 2.Curb 3. Vehicle
注:为光电开关圆弧阵列的目标带的中心点;为圆弧轨迹的偏距。
Note:is the central point of the target band of photoelectric switch arc array;is offset distance of arc trajectory.
图6 不同位姿调控示意图
Fig.6 Sketch diagram of different position and orientation control
根据上述调控模式和式(11)、式(12)得到的车体位姿,通过控制两轮差速小车的左右轮速v、v来实现沿边行进。
3 沿边导航效果试验
3.1 车体结构与光电开关布置参数
试验使用的自主开发的长1 200 mm、宽600 mm、高550 mm两轮独立驱动小车,采用400 W伺服减速电机为左右轮动力。采用欧姆龙E3Z-D61的NPN输出型反射型光电开关,检测范围5~100 mm可调,其调节精度可达1 mm,指向角2.5°。针对下沉路沿和凸起路沿分别按以下方式布置光电开关圆弧阵列。
1)下沉路沿:试验时将光电开关检测距离调节至90 mm,垂直向下入射地面、离地高度为50 mm,布置的光电开关圆弧的弦与小车沿边一侧重合,取圆弧的参数=20°、=3291 mm,由公式(14)、式(15)可知其位置检测最大误差为12.5 mm,姿态检测最大误差为3.3°。按照车速0.15 m/s和式(16)测算,只要系统响应时间在0.1 s以内即可满足光电开关圆弧阵列的位姿检测需要(图7a)
3.2 无障碍沿边行走试验
3.2.1 光电开关布置参数
试验采用欧姆龙E3Z-D61,NPN输出型反射型光电开关,检测范围5~100 mm可调,其调节精度可达1 mm,指向角2.5°。为对该方法进行初步验证,下沉路沿和凸起路沿分别按下布置光电开关圆弧阵列:
1)下沉路沿:试验时将光电开关检测距离调节至90 mm,垂直向下入射地面、离地高度为50 mm,布置的光电开关圆弧的弦与小车沿边一侧重合,取圆弧的参数=20°、=3 291 mm,由式(14)、(15)可知其位置检测最大误差为12.5 mm,姿态检测最大误差为3.3°。按照车速0.15 m/s和式(16)测算,只要系统响应时间在0.1 s以内即可满足光电开关圆弧阵列的位姿检测需要(图7a)。
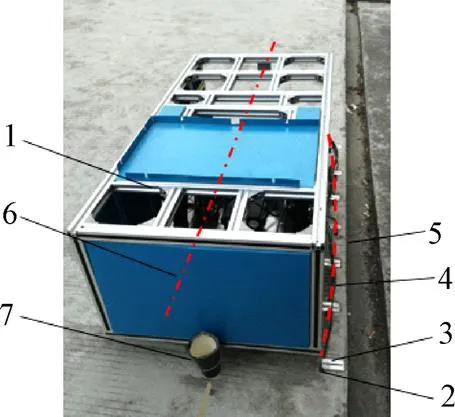
1.自主小车 2.光电开关 3.光电开关支架 4.光电开关圆弧 5.下沉路沿 6.车体中心线 7.沙漏
1.Vehicle 2.Photoelectric switch 3.Stand 4.Arc array 5.Concave curb 6.Vehicle center line 7.Hourglass
a. 下沉路沿
a. Concave curb
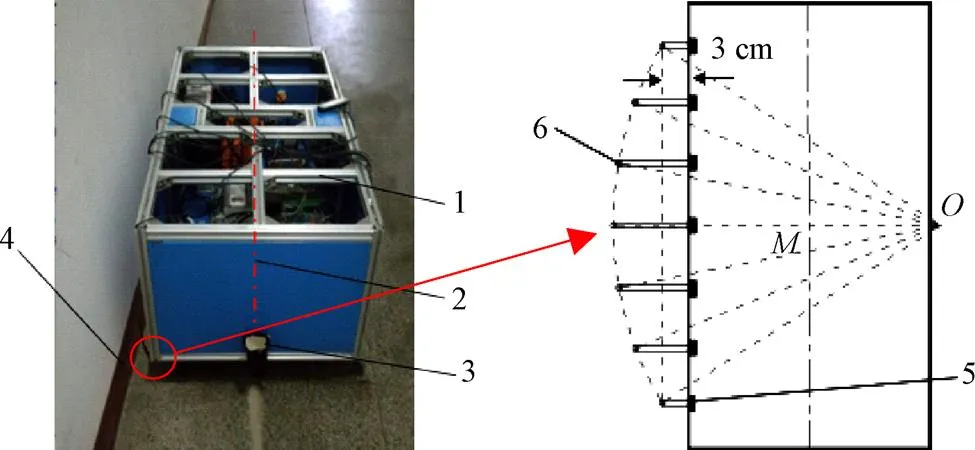
1.自主小车 2.车体中心线 3.沙漏 4.凸起路沿 5.光电开关 6光电开关检测点
1.Vehicle 2.Vehicle center line 3.Hourglass 4.Convex curb 5.Photoelectric switches 6.Detection points
b. 凸起路沿
b. Convex curb
图7 下沉凸起路沿光电开关布置示意图
Fig.7 Arrangement of photoelectric switches walking along concave curb and convex curb
2)凸起路沿:试验时将光电开关水平布置在小车底部,通过调节光电开关的水平检测距离形成参数=20°、=3 291 mm光电圆弧,布置的光电圆弧的弦与小车边缘距离为30 mm(图7b)。
3.2.2 试验材料与方法
为方便试验开展,对于下沉路沿和凸起路沿的沿边行走试验处理分别为:
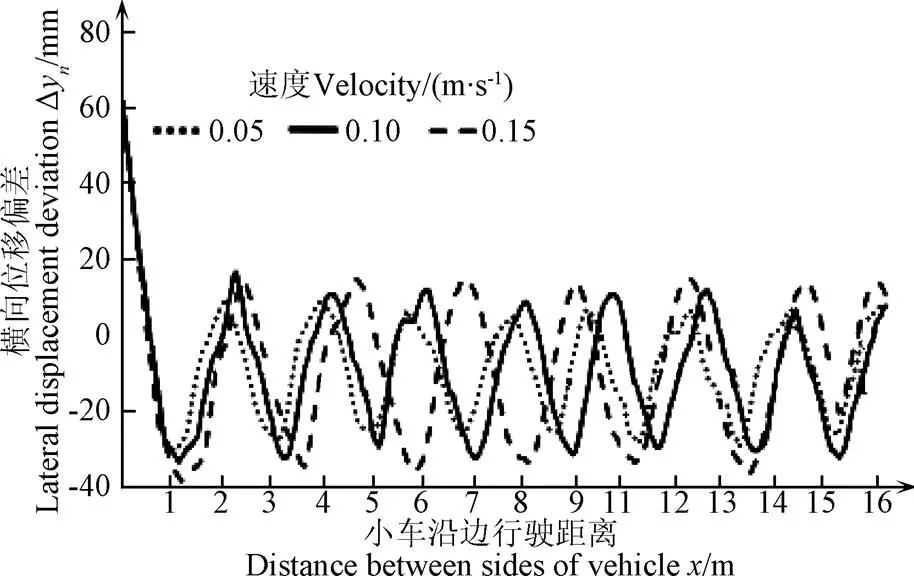
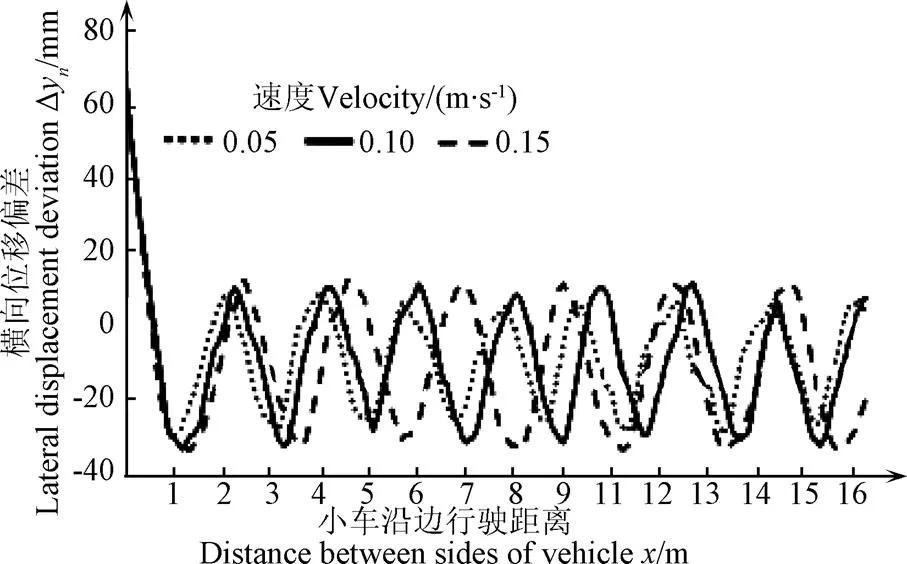
1)下沉路沿:选取江苏大学农业装备工程学院实验楼旁的水泥路沿,路沿的台阶高度约140 mm,小车尾部中心出安装一沙漏,小车初始位置中心距离路面边沿400 mm、航向角为0°;小车分别以0.05、0.1、0.15 m/s的初速度分别行驶16 m,得到沙漏在水泥路面留下的轨迹,从起点开始使用T型尺每隔50 mm测量一次黄沙轨迹中心点到路面边沿的垂直距离y,并记录下来(图7a)。
2)凸起路沿:选取江苏大学农业装备工程学院实验楼内的走廊通道的墙壁,在小车尾部中心出安装一沙漏,小车初始位置中心距离路面边沿430 mm、航向角为0°;小车的左右轮初始速度为0.05、0.1、0.15 m/s进行试验,行驶距离为16 m,得到沙漏在水泥路面留下的轨迹,从起点开始使用T型尺每隔50 mm测量一次黄沙轨迹中心点到路面边沿的垂直距离y,并记录下来(图7b)。
3.2.3 试验结果与分析
试验中小车并未出现坠落下沉路沿、与凸起路沿碰撞现象,其沿边导航效果可以用其相对于路沿的位置偏差、航向角来反应。小车中心与路沿的位置偏差Δy为
Δy=y-0(18)
其中0为小车相对于路沿的理想位置,由3.2.1节内容可知,下沉路沿和凸起路沿的0分别为335、365 mm。
可得小车与路沿位置偏差Δy随小车沿边行驶距离的变化关系(图8)。
a. 下沉路沿
a. Concave curb
b. 凸起路沿
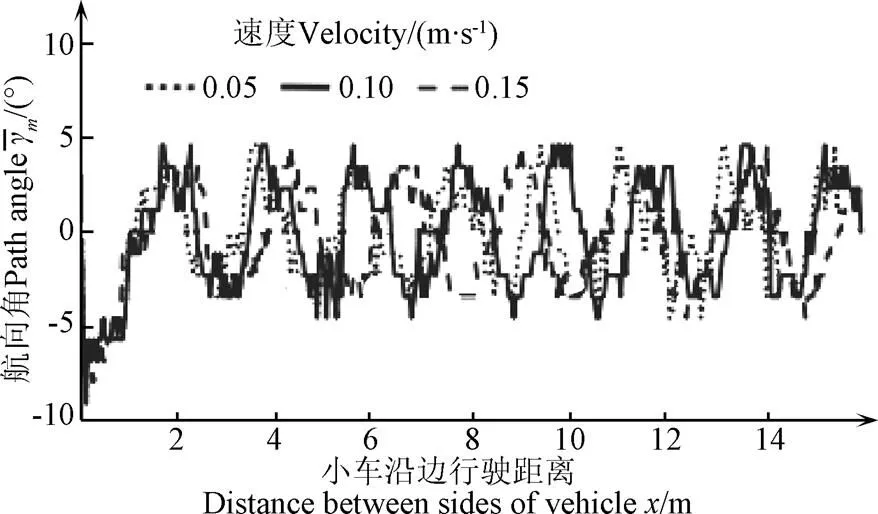
同理可得小车相对于路沿的航向角变化图(图9)
a. 下沉路沿
a. Concave curb
b. 凸起路沿


表2 自主小车行走轨迹分析
由上面的数据分析可见:
1)随着速度增大,小车的横向位移偏差、航向角偏差的均值呈变大趋势,且两者的波动也逐渐变大,但在理论设计的速度内,未出现温室小车位姿剧烈震荡、调控不稳现象。
2)在0.15 m/s速度内,小车的实际位置与离理想位置偏差保持在−35 mm~+15 mm,其偏差的绝对值的均值在16.9 mm以内,角度偏差保持−5°~+5°,其偏差绝对值的均值在4°以内,相对于温室自主小车尺寸,此误差基本能够满足实际施药、搬运等作业的行走需求。
3)沿边导航中每行驶约2 m自动实施1次调控,且此调控距离随速度增加而呈增加趋势,表明基于光电开关圆弧阵列可实现温室内的低调控频度的沿边平顺导航行进。
3.3 路沿障碍物的导航影响试验
3.3.1 试验材料与方法
实际作业时,温室的下沉路沿可能存在杂物,使部分下沉路沿高度与地面一致,此时光电圆弧阵列反映的车辆的有效位姿与实际具有一定偏差,为验证杂物的对沿边导航效果的影响,在路沿的3 m处设置长100 mm杂物、5 m处设置长300 mm杂物、12 m处设置600 mm杂物,小车初始位置中心距离路面边沿400 mm、航向角为0°,以0.1 m/s的初速度行驶,得到沙漏在水泥路面留下的轨迹,从起点开始使用T型尺每隔50 mm测量一次黄沙轨迹中心点到路面边沿的垂直距离y,并记录下来。
3.3.2 试验结果
由上数据可得到有杂物情况下小车与路沿位置偏差Δy随小车沿边行驶距离的变化关系,结合3.2.3节内容可得图10。
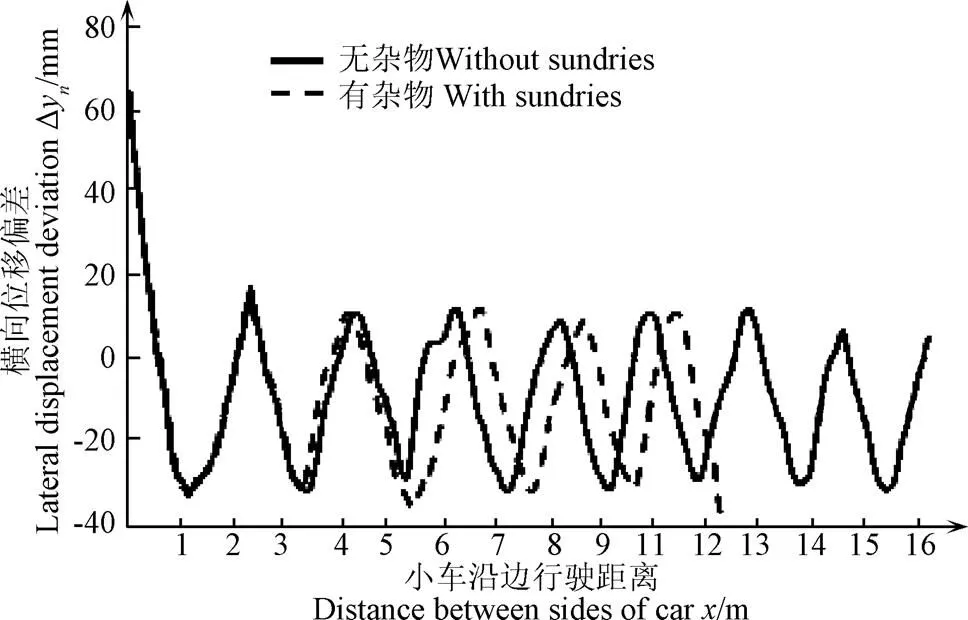
注:在路沿3、5、12 m处,分别设置长度为100、300、600 mm杂物。
小车在长度为100 mm杂物附近的位姿并未发生很大化,长度为300 mm杂物附近的位姿波动明显增大,横向位移偏差达38 mm,长度为600 mm杂物附近的位姿偏差急剧增大,严重偏向路沿外侧,车体会坠落下沉路沿。试验表明系统具有一定的容错性,能够适应300 mm以内的杂物,可以满足生产中绝大多数情况。
4 结 论
1)提出了基于光电开关圆弧阵列理想目标带原理的温室小车位姿检测与调控方法,并建立了基于光电圆弧阵列信号触发数与触发中心序号双指标的沿边位姿检测模型。
2)下沉路沿与凸起路沿的沿边行走试验表明,0.15 m/s速度内小车的沿边位置与姿态偏差分别保持在−35 mm~+15 mm和−5°~+5°范围内,小车的调控精度和平顺性均能满足温室小车沿边导航工作需求,并且沿下沉路沿行走时具有一定容错性。
初步试验验证了光电开关圆弧阵列的沿边导航方法的有效性,而通过提高所使用两轮差速小车的加工与安装精度,可进一步减小两轮动作误差和提高沿边导航控制精度。同时,对于光电开关圆弧阵列的小型集成化研究工作正在进一步进行中。
[1] 张欣. 日光温室相变材料墙板蓄/放热过程数值模拟研究[D].杨凌:西北农林科技大学,2016:1-6.
Zhang Xin. CFD Based Simulation of Heat Charging /Discharging Process of Phase Change Wallboard in Chinese Solar Greenhous[D]. Yangling:Northwest A&F University, 2016: 1-6. (in Chinese with English abstract)
[2] 王志文,郭戈. 移动机器人导航技术现状与展望[J]. 机器人,2003,25(5):470-474.
Wang Zhiwen, Guo Ge. Present situation and future development of mobile robot navigation technology[J]. Robot, 2003, 25(5): 470-474. (in Chinese with English abstract)
[3] Ohmori H. Utilization of the electric vehicle in greenhouse horticulture[J]. Journal of the Japanese Society of Agricultural Machinery, 2010, 72: 527-530.
[4] Yamashita J, Satou K, Hikita M, et al. Development of an automatic transport vehicle for use in greenhouses[J]. Journal of the Japanese Society of Agricultural Machinery,2010,53:75-84.
[5] 牛雪梅,高国琴,鲍智达,等. 基于滑模变结构控制的温室喷药移动机器人路径跟踪[J]. 农业工程学报,2013,29(2):9-16.
Niu Xuemei, Gao Guoqin, Bao Zhida, et al. Path tracking of mobile robots for greenhouse spraying controlled by sliding mode variable structure[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2013, 29(2): 9-16. (in Chinese with English abstract)
[6] 贾士伟,李军民,邱权,等. 基于激光测距仪的温室机器人道路边缘检测与路径导航[J]. 农业工程学报,2015,31(13):39-45.
Jia Shiwei, Li Junmin, Qiu Quan, et al. New corridor edge detection and navigation for greenhouse mobile robots based on laser scanner[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2015, 31(13): 39-45. (in Chinese with English abstract)
[7] 王新忠,韩旭. 基于最小二乘法的温室番茄垄间视觉导航路径检测农业机械学报,2012(6):161-166.
Wang Xinzhong, Han Xu. Navigation line detection of tomato ridges in greenhouse based on least square method[J]. Transactions of the Chinese Society of Agricultural Machinery, 2012(6): 161-166. (in Chinese with English abstract)
[8] 赵颖,陈兵旗,王书茂. 基于机器视觉的耕作机器人行走目标直线检测[J]. 农业机械学报,2006,37(4):83-86.
Zhao Ying, Chen Bingqi, Wang Shumao. Fast detection of furrows based on machine vision on autonomous mobile robot[J]. Transactions of the Chinese Society for Agricultural Machinery, 2006, 37(4): 83-86. (in Chinese with English abstract)
[9] 张甜. 高茬水田耕整路径机器视觉识别方法研究[D]. 武汉:华中农业大学,2014.
Zhang Tian. Study on the Method of Machine Vision Recognition of High Stubble Paddyfield-tillage’s Path [D].Wuhan:Huazhong Agricultural University, 2014. (in Chinese with English abstract)
[10] 高国琴,李明. 基于K-means算法的温室移动机器人导航路径识别[J]. 农业工程学报,2014,30(7): 25-33.
Gao Guoqin, Li Ming. Navigating path recognition for greenhouse mobile robot based on K-means algorithm[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2014, 30(7): 25-33. (in Chinese with English abstract)
[11] Kyunghoon Jung, Inseong Lee, Hajun Song, et al. Vision guidance dystem for AGV using ANFIS[C]// International Conference on Intelligent Robotics and Applications. Springer-Verlag, 2012:377-385.
[12] Butdee S, Suebsomran A. Automatic guided vehicle control by vision system[C]//Industrial Engineering and Engineering Management, 2009. IEEE International Conference on. IEEE, 2009: 694-697.
[13] Grimson W E L, Lozano-Pérez T. Model- based recognition and localization from sparse range or tactile data[J]. International Journal of Robotics Research, 1984, 3(3): 3-35.
[14] 李明,李旭,孙松林,等. 基于全方位视觉传感器的农业机械定位系统[J]. 农业工程学报,2010,26(2):170-174.
Li Ming, Li Xu, Sun Songlin, et al. Localization system of agricultural machinery based on omni-directional vision sensor[J]. Transactions of the Chinese Society of Agricultural Engineering(Transactions of the CSAE), 2010, 26(2): 170-174. (in Chinese with English abstract)
[15] 江锽,肖爱平. 喷药机器人在温室中道路识别及边界提取的研究[J]. 林业机械与木工设备,2014,(10):18-21.
Jiang Huang, Xiao Aiping. Study on spraying robot’s road recognition and boundary extraction in greenhouses[J]. Forestry Machinery & Woodworking Equipment, 2014, (10): 18-21. (in Chinese with English abstract)
[16] 汪华章,汪亮. 基于MSP430的“智能吸尘器”设计[J]. 西南民族大学学报:自然科学版,2015,41(5):593-598.
Wang Huazhang, Wang Liang. Design of intelligent cleaner based on MSP430[J]. Journal of Southwest University for Nationalities: Natural Science Edition, 2015, 41(5): 593-598. (in Chinese with English abstract)
[17] 赵堂春,于彤. 传感器技术在智能移动(保洁)机器人装置中的应用[J]. 机电产品开发与创新,2012,25(5):7-9.
Zhao Tangchun, Yu Tong. The application of sensor technology in intelligent mobile (cleaning) robotic devices[J]. Development & Innovation of Machinery & Electrical Products, 2012, 25(5): 7-9. (in Chinese with English abstract)
[18] 贾士伟, 李军民, 邱权,等. 基于激光测距仪的温室机器人道路边缘检测与路径导航[J]. 农业工程学报,2015,31(13):39-45.
Jia Shiwei, Li Junmin, Qiu Quan, et al. New corridor edge detection and navigation for greenhouse mobile robots based on laser scanner[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2015, 31(13): 39-45. (in Chinese with English abstract)
[19] 周慧. 基于单超声传感器的移动机器人沿墙导航[J]. 声学技术,2014,33(S2):243-246.
Zhou Hui. Mobile Robot wall-following navigation based on a single ultrasonic sensor[J]. Technical Acoustics, 2014, 33(S2): 243-246.
[20] 查峰,肖世德,冯刘中,等. 移动机器鼠沿墙导航策略与算法研究[J]. 计算机工程,2012(6):172-174.
Zha Feng, Xiao Shide, Feng Liuzhong, et al. Research on wall-following navigation strategy and algorithm for mobile mechanical mouse[J]. Computer Engineering, 2012(6): 172-174. (in Chinese with English abstract)
[21] 袁宇龙,李军. 基于模糊逻辑的移动机器人沿墙行为精准控制[J]. 世界科技研究与发展,2013(6):704-708.
Yuan Yulong, Li Jun. Precision control of mobile robot in wall-following behavior based on fuzzy logic[J]. World Sci-Tech R&D, 2013(6): 704-708. (in Chinese with English abstract)
[22] 徐明亮,柴志雷,须文波. 移动机器人模糊Q-学习沿墙导航[J]. 电机与控制学报,2010(6):83-88.
Xu Mingliang, Chai Zhilei, Xu Wenbo. Wall-following control of a mobile robot with fuzzy Q-learning[J]. Electric Machines and Control, 2010(6): 83-88. (in Chinese with English abstract)
[23] 杜利超. 大棚喷雾作业机器人底盘的设计与研究[D]. 北京:北京林业大学,2010.
Du Lichao. Design and Research on Greenhouse Spray Robot Chassis[D]. Beijing: Beijing Forestry University, 2010. (in Chinese with English abstract)
[24] 赵韩,尹晓红,吴焱明. 非完整约束AGV轨迹跟踪的非线性预测控制[J]. 中国机械工程,2011(6):681-686.
Zhao Han, Yin Xiaohong, Wu Yanming. Nonlinear model predictive control of trajectory tracking for nonholonomic AGV[J]. China Mechanical Engineering, 2011(6): 681-686. (in Chinese with English abstract)
[25] 徐俊艳,张培仁. 非完整轮式移动机器人轨迹跟踪控制研究[J]. 中国科学技术大学学报,2004(3):121-125.
Xu Junyan, Zhang Peiren. Research on trajectory tracking control of nonholonomic wheeled mobile robots[J]. Journal of University of Science and Technology of China, 2004(3): 121-125. (in Chinese with English abstract)
[26] Vis I A. Survey of research in the design and control of automated guided vehicle systems[J]. European Journal of Operational Research, 2006, 170(3): 677-709.
[27] Lee Y, Suh J, Lee J. Driving control of an AGV for an automated container terminal using an immunized PID controller based on cell-mediated immunity[J]. Artificial Life and Robotics 2005, 9(2): 90-95.
[28] Dogandzic A, Riba J, Seco G, et al. Positioning and navigation with applications to communications[J]. IEEE Signal Proc Magazine, 2005, 22(4): 10-11.
[29] Le-Anh T, De Koster M. A review of design and control of automated guided vehicle system[J]. Eur, J Oper Res, 2006, 171: 1-23.
[30] 史晨红,左敦稳,张国家. 基于轨迹控制的AGV运动控制器设计研究[J]. 机械设计与制造工程,2014(2):7-12.
Shi Chenhong, Zuo Dunwen, Zhang Guojia. Design of AGV-based trajectory navigation motion controller[J]. Machine Design and Manufacturing Engineering, 2014(2): 7-12. (in Chinese with English abstract)
Curb-following detection and navigation of greenhouse vehicle based on arc array of photoelectric switches
Ju Jin1,Liu Jizhan1※,Li Nan1, Li Pingping2
(1.,,212013; 2.,210037,
In the past 20 years, protected agriculture has been developed rapidly in China, with a total area of 4,000 kha. A large number of mobile platforms are urgently needed to satisfy the need of operation, and research on autonomous vehicles with navigation ability has been highly valued. For structured hard pressed road surface between cultivation beds in modern greenhouse, curb-following navigation technology is most valuable for autonomous vehicle working in greenhouse. However, present curb-following navigation technologies based on machine vision are too complicated and lack of stability, while navigation technologies based on distance sensing cannot reach ideal accuracy of position/orientation detection. The target of curb-following navigation in this paper was to control the vehicle body within a stable position/orientation relative to the curb based on limited simple high/low level signals from arc array of photoelectric switches. Principle of detection and control of position/orientation based on both arc array of photoelectric switches and ideal control area was firstly introduced, and indexNthat represents the number of triggered photoelectric switches and indexNwhich represents the center sequence number of triggered photoelectric switches were introduced to establish a position/orientation detection model. The position/orientation was classified by different thresholds of the two indices which can trigger the corresponding control program of trajectory. And then accurate position and orientation which were calculated by the values of two indexes were used to set the parameters of control program to realize the curb line following navigation in real time. This method can realize precise navigation with just limited number of high-low signals from photoelectric switches. The curb-following navigation accuracy relies on number of photoelectric switches, radius and central angle of the arc array, while triggered time interval between adjacent photoelectric switches must satisfy the need of response of sensing, control and mechanical transmission for a vehicle. Differential controlling strategies for different position/orientation states of vehicle based on arc array of photoelectric switches were also put forward. It was found from experiments that as the speed increased, both the transverse error and course angle of the vehicle displacement would rise. While within the designed speed, neither violent shock nor instability was found. Experiment results also indicated that the deviations of vehicle’s position and orientation were kept -35 mm to +15 mm and -5° to +5°, respectively. Relative to the size of the greenhouse vehicle, the error was acceptable which satisfied the curb-following navigation requirement of pesticide spraying, seedling transplanting, transporting etc. in greenhouse. And the control cycle of trajectory was about 2 m along the curb line, which indicated that the vehicle can run smoothly along the curb line under a low control frequency in the greenhouse based on the method above. It was also found that this method could maintain better curb-following navigation accuracy even under interference of sundries if its length was not more than 300 mm, which may meet the actual need of vast majority of the production. In this paper, we proposed new technical ideas for robots running along curb with low cost in the greenhouse.
navigation; greenhouse;monitoring; photoelectronic switches; circular arc; curb line following; position and orientation
10.11975/j.issn.1002-6819.2017.18.024
O345; TS201.7
A
1002-6819(2017)-18-0180-08
2017-03-07
2017-06-05
江苏省农业科技支撑重点资助项目(BE2014406),国家自然科学基金项目(51475212),江苏省农业科技自主创新资金项目(CX(15)1020),江苏省六大人才高峰项目(JXQC-008)、江苏高校优势学科建设工程项目(PAPD)和江苏省2015年度普通高校研究生实践创新计划项目(SJLX15_0507)
居 锦,男,江苏扬州人,主要从事农业机器人研究。镇江 现代农业装备与技术教育部重点实验室(江苏大学),212013。Email:jujin19880626@163.com
刘继展,男,研究员,博士生导师,主要从事农业机器人研究。镇江 现代农业装备与技术教育部重点实验室(江苏大学),212013。Email:liujizhan@163.com
猜你喜欢
建材发展导向(2022年4期)2022-03-16
中国惯性技术学报(2020年4期)2020-12-14
商品与质量(2020年33期)2020-11-07
浙江海洋大学学报(自然科学版)(2020年5期)2020-06-19
科学技术创新(2020年6期)2020-04-18
电子技术与软件工程(2019年6期)2019-04-26
现代商贸工业(2018年31期)2018-12-08
制造技术与机床(2017年3期)2017-06-23
制造技术与机床(2017年3期)2017-06-23
智富时代(2015年3期)2015-05-22
