
基于方程驻轴的永磁同步电机动态数学模型
2017-11-01 22:21彭亦稰陈小元
丽水学院学报 2017年5期
彭亦稰,陈小元
(丽水学院工学院,浙江丽水323000)
基于方程驻轴的永磁同步电机动态数学模型
彭亦稰,陈小元
(丽水学院工学院,浙江丽水323000)
常用的三相永磁同步电机动态矩阵数学模型的推导过程庞杂,理解难度大。用复数矢量表示绕组轴线位置,获得包含绕组位置信息的绕组驻轴电压方程,推导永磁同步电机的复数矢量电压方程,建立具有随转子旋转的正交两相绕组的永磁同步电机数学模型。用复数矢量运算阐述数学模型推导过程,简练且物理概念清晰,可促进对永磁同步电机动态数学模型的理解及应用。
永磁同步电机;动态数学模型;复数矢量
0 引言
在电机控制的教材[1-4]和相关的论文[5-8]中,对于三相永磁同步电机,均采用矩阵描述其动态数学模型,以便于电机调速时的控制编程。但矩阵模型的推导过程庞杂,理解难度大。
本文将表示绕组轴线位置的复数矢量与绕组方程相乘,获得包含绕组位置信息的绕组驻轴方程。在此基础上,通过复数矢量运算,建立三相永磁同步电机的复数矢量电压方程,推导坐标设立在转子上的永磁同步电机的旋转正交两相绕组数学模型。力求模型推导过程简练且物理概念清晰,以利于理解及应用永磁同步电机动态数学模型。
1 电机的驻轴电压方程
图1所示为三相永磁同步电机的单元电机(两极电机)的永磁转子和Y连接的定子绕组,图中uA、uB和uC为定子三相绕组的相电压,iA、iB和iC为定子三相绕组的相电流。

图1 永磁同步电机的单元电机
图1中,以定子A相绕组轴线为α轴,从α轴逆时针转π/2为β轴,形成静止的αβ坐标。以永磁转子的N极轴线为d轴,从d轴逆时针转π/2为q轴,形成旋转的dq坐标。θ为d轴与α轴之间的转角,转子逆时针旋转的角速度ω为

定子A、B和C相绕组的电压方程为

式中R为定子的相绕组电阻,ψA、ψB和ψC分别为A、B和C相绕组交链的磁链。
式(2)中不包含三相绕组的位置信息,需附加说明。由于三相绕组在空间对称分布,若以α轴为实轴、β轴为虚轴构成复数平面,则A、B、C相绕组轴线位置可分别用复数 ej0、ej2π/3、e-j2π/3表示,如图1所示。
将 ej0、ej2π/3、e-j2π/3分别乘 A、B、C 相绕组方程,得包含绕组位置信息的驻轴电压方程:
2 电机的矢量电压方程
2.1 αβ坐标中的矢量电压方程
将待定常数k乘式(3)的三个等式并相加,得三相永磁同步电机在αβ坐标中的矢量电压方程

式(4)中的电流矢量i、电压矢量u和磁链矢量ψ分别为:
计算永磁同步电机功率,确定待定常数k。由电压矢量和电流矢量计算电机输入功率p的算式为

式中i*为i的共轭矢量,而定子电流有关系

由式(5)、(6)和(7)得

显然,待定常数k应为

在αβ坐标中,电流矢量i、电压矢量u和磁链矢量ψ可分别表达为

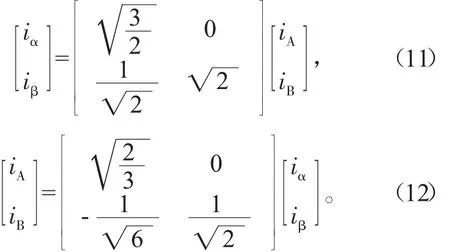
将式(10)的第一式、式(9)和(7)代入式(5)的第一式,得所谓的Clarke变换式
当电机三相对称运行时,电压矢量u和磁链矢量 ψ 也有式(7)、(11)和(12)的关系成立。
2.2 dq坐标中的矢量电压方程
dq坐标和αβ坐标的关系如图1所示,在静止αβ坐标中的电流矢量i、电压矢量u和磁链矢量ψ,在旋转dq坐标中变换为电流矢量idq、电压矢量udq和磁链矢量ψdq,变换前后的矢量关系为

在dq坐标中,电流、电压和磁链矢量可表达为将式(14)和(10)的第一式代入式(13)的第一式,得所谓的Park变换式


3 电机的正交两相模型
3.1 αβ坐标中的正交两相模型
将式(10)代入式(4),得驻于 αβ 坐标轴的电压方程

电压矢量和磁链矢量也有如式(15)和(16)所示的变换关系。
将e-jθ乘式(4)两端,整理得三相永磁同步电机在dq坐标中的矢量电压方程
式(18)表明,三相永磁同步电机可等效为具有静止正交α绕组和β绕组的两相永磁同步电机,如图2所示。

图2 正交两相绕组的永磁同步电机
对称三相电机与正交两相电机之间的变换关系,正是式(11)和(12)所示的Clarke变换关系。
3.2 dq坐标中的正交两相模型
将式(14)代入式(17),得驻于dq坐标轴的电压方程

式(19)表明,三相永磁同步电机可等效为具有旋转正交d绕组和q绕组的两相永磁同步电机,如图2所示。
旋转两相电机与静止两相电机之间的变换关系为式(15)和(16)所示的Park变换关系。
由图2可知,d绕组和q绕组中的磁链为
式中ψr为永磁转子在d绕组中产生的磁链,为常量;Ld为d绕组电感,Lq为q绕组电感,均为常量。
将式(20)代入式(19),得旋转dq两相绕组永磁同步电机的参数电压方程

4 电机参数的变换关系
将三相永磁同步电机变换为两相电机时,由变换前后的电压方程式(2)和(18)知,两相绕组电阻等于三相绕组电阻。依据Clarke变换式,推导三相-两相变换时与磁链相关的电机参数变换关系。
设静止的A相绕组交链旋转的永磁转子磁场产生的交变磁链幅值为ψf,将三相绕组旋转至A相绕组轴线与d轴重合,旋转的A相绕组交链永磁转子磁场产生的磁链即为常量ψf。旋转三相绕组与dq两相绕组之间的变换关系,就是静止三相绕组与αβ两绕组之间的变换关系。由式(12)得旋转三相绕组的A相绕组电流和磁链分别为

由于三相电流之和为零,旋转三相绕组的A相绕组ψA为

式中Lσ为三相绕组的相绕组漏电感,Lmd为三相绕组的相绕组d轴主电感。将式(20)第一式、式(24)和(22)代入式(23)可得
将三相绕组旋转至A相绕组轴线与q轴重合,用相同的方法可推导得

式中np为永磁同步电机的磁极对数。
电机的转动方程为

式中J为永磁同步电机驱动系统的转动惯量,TL为负载转矩。
6 结论
式中Lmd为三相绕组的相绕组q轴主电感。
5 电机的转矩表达式
三相永磁同步电机的单元电机(两极电机)定子绕组产生的电磁转矩矢量是绕组的磁链矢量与电流矢量的叉乘,而永磁转子产生的电磁转矩与其大小相等,方向相反。当采用复数表达矢量时,永磁转子产生的电磁转矩Te为

用复数矢量表示绕组轴线位置,将该复数矢量与对应绕组方程相乘,获得包含绕组位置信息的绕组驻轴方程;将三相永磁同步电机的绕组驻轴方程相加,获得了电机的复数矢量电压方程;通过分解复数矢量电压方程至坐标实轴和虚轴,将三相永磁同步电机变换为正交两相电机;在永磁转子上设立坐标,再将三相永磁同步电机变换为具有随转子旋转的正交两相绕组的电机。
用复数矢量运算阐述数学模型推导过程,使推导过程简练且物理概念清晰,有助于理解及应用永磁同步电机动态数学模型,具有现实意义。
[1]阮毅,陈伯时.电力拖动自动控制系统[M].4版.北京:机械工业出版社,2014:155-199.
[2]李华德,李敬,白晶.电力拖动自动控制系统[M].北京:机械工业出版社,2009:127-232.
[3]李宁,白晶,陈桂.电力拖动与运动控制系统[M].北京:高等教育出版社,2009:67-141.
[4]孙冠群,蔡慧,李景.控制电机与特种电机[M].北京:清华大学出版社,2012:113-124.
[5]丁文,高琳,梁得亮,等.永磁同步电机矢量控制系统的建模与仿真[J].微电机,2010,43(2):66.
[6]鲁文其,胡育文,梁骄雁,等.永磁同步电机伺服系统抗扰动自适应控制[J].中国电机工程学报,2011,31(3):75.
[7]牛里,杨明,刘可述,等.永磁同步电机电流预测控制算法[J].中国电机工程学报,2012,2(6):131.
[8]牛里,杨明,王庚,等.基于无差拍控制的永磁同步电机鲁棒电流控制算法研究[J].中国电机工程学报,2013,33(15):78.
The Dynamic Mathematical Model of PMSM Based on Standing-axis Equations
PENGYixu,CHENXiaoyuan
(FacultyofEngineering,Lishui University,Lishui 323000,Zhejiang)
The dynamic matrix mathematical model of the three-phase permanent magnet synchronous motor(PMSM)is complicated and not easily understandable.In this paper,the axis positions of the windings are expressed by the complex vector,and then the standing-axis voltage equations with the position information of the windings is obtained.The voltage equations of the PMSM with complex vector are derived and the dynamic mathematical model of PMSM with the orthogonal two-phase windings rotating with the rotor is established.The conciseness of the model expressed with complex vector can make the dynamic mathematical model of PMSM easily understandable and applicable.
permanent magnet synchronous motor;dynamic mathematical model;complex vector
10.3969/j.issn.2095-3801.2017.05.017
TM351
A
2095-3801(2017)05-0097-05
2017-03-28;
2017-06-14
浙江省高等教育教学改革项目“学为导向教学模式构建的研究与实践——以‘电力拖动自动控制系统’课程为例”(jg20160188);浙江省高等教育教学改革项目“现代电源技术综合实验平台研制及实验内容设计”(jg2015186);丽水市高层次人才培养资助项目“电动汽车驱动用新型SRM的电磁设计及转矩控制研究”(2014RC07)
彭亦稰,男,上海人,副教授。
猜你喜欢
微电机(2022年8期)2022-10-12
电机与控制应用(2022年1期)2022-09-01
电机与控制应用(2022年4期)2022-06-27
防爆电机(2022年3期)2022-06-17
中学生数理化(高中版.高考数学)(2021年11期)2021-12-21
中学生数理化(高中版.高二数学)(2021年4期)2021-07-20
中学生数理化(高中版.高二数学)(2021年4期)2021-07-20
微特电机(2021年6期)2021-06-22
防爆电机(2021年2期)2021-06-09
防爆电机(2020年6期)2020-12-14
