基于SOFM的岸桥提升电机状态识别及可视化
2017-11-01 08:57杨志启
东华大学学报(自然科学版) 2017年4期
唐 刚, 杨志启, 胡 雄
(上海海事大学 物流工程学院 上海 201306)
基于SOFM的岸桥提升电机状态识别及可视化
唐 刚, 杨志启, 胡 雄
(上海海事大学 物流工程学院 上海 201306)
研究并分析自组织特征映射(self-organizing feature map, SOFM)神经网络的结构和算法, 并应用于岸桥提升电机的状态识别及可视化.通过运用SOFM, 对属性约简后的数据进行聚类及可视化分析,以有效值、脉冲指标和裕度指标为特征向量, 得到3种主要的电机状态, 并利用Matlab实现仿真可视化.通过对样本数据处理, 实现电机状态的准确识别, 从而更好地监测岸桥提升电机, 同时也为机械状态的识别和维护提供一种新途径.
神经网络; 自组织特征映射; 无监督学习; 状态识别; 可视化
在挖掘岸桥提升电机监测信息之前, 通常无法得到数据的先验知识.状态识别, 即聚类分析, 是一种有效的监测手段.借助非监督学习的聚类算法可以有效解决上述问题.
岸桥提升电机多特征参数状态识别是通过多个传感器获取样本数据, 从而形成一个多维空间, 然后将数据降到低维空间中进行识别.在映射过程中, 高维空间数据的主要性质需要在低维空间中表现出来, 以提高电机状态识别的准确性.
1 高维数据可视化及其方法
1.1高维数据可视化的概念
高维数据的变量形式通常为F=f(x1,x2, …xn),n为测点数.例如, 岸桥提升电机的监测点有N个, 每个测点有9个特征值, 就组成了N×9维的数据. 高维数据的可视化表达,通常采用降低数据维数的方法, 借助非线性或线性的表达方式将高维数据转化到人类容易理解的低维空间.线性方法不易表达复杂的高维信息, 但是采用非线性的方法进行降维时, 复杂数据会被认为其有效维数要比实际维数小, 这是由于其中有些维数并不影响数据本身的性质.有效维数的数据通常是根据样本数据的显著因子而定的, 即使有效维数不能在低维线性子空间显示, 也应有一个低维非线性结构与之相对应[1].
1.2自组织特征映射模型的映射结
自组织特征映射(self-organizing feature map, SOFM)网共有两层[2-5], 一是输入层, 二是竞争层.其中, 竞争层和输出层位于同一层.SOFM的映射结构如图1所示.一维线阵是最简单的, 每个竞争层的神经元之间都有侧向连接; 二维平面线阵是最常用和最经典的方法, 每一个神经元侧向与周围神经元相连接, 形成一个矩阵形式.
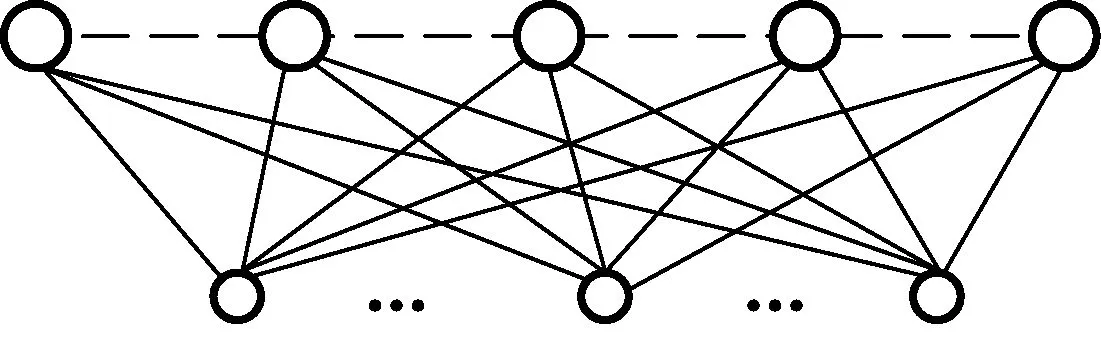
(a) 一维线阵

(b) 二维平面线阵图1 SOFM映射结构Fig.1 Feature structure of SOFM
1.3SOFM算法
SOFM是一种无监督的自组织学习聚类算法.该算法通过对输入数据进行学习, 依照优胜邻域内所有神经元的远近距离的要求, 不同程度地调整权值, 从而确定空间权值密度, 使其与样本数据的概率分布趋向相似, 此方法可以有效保证输入的统计特征.
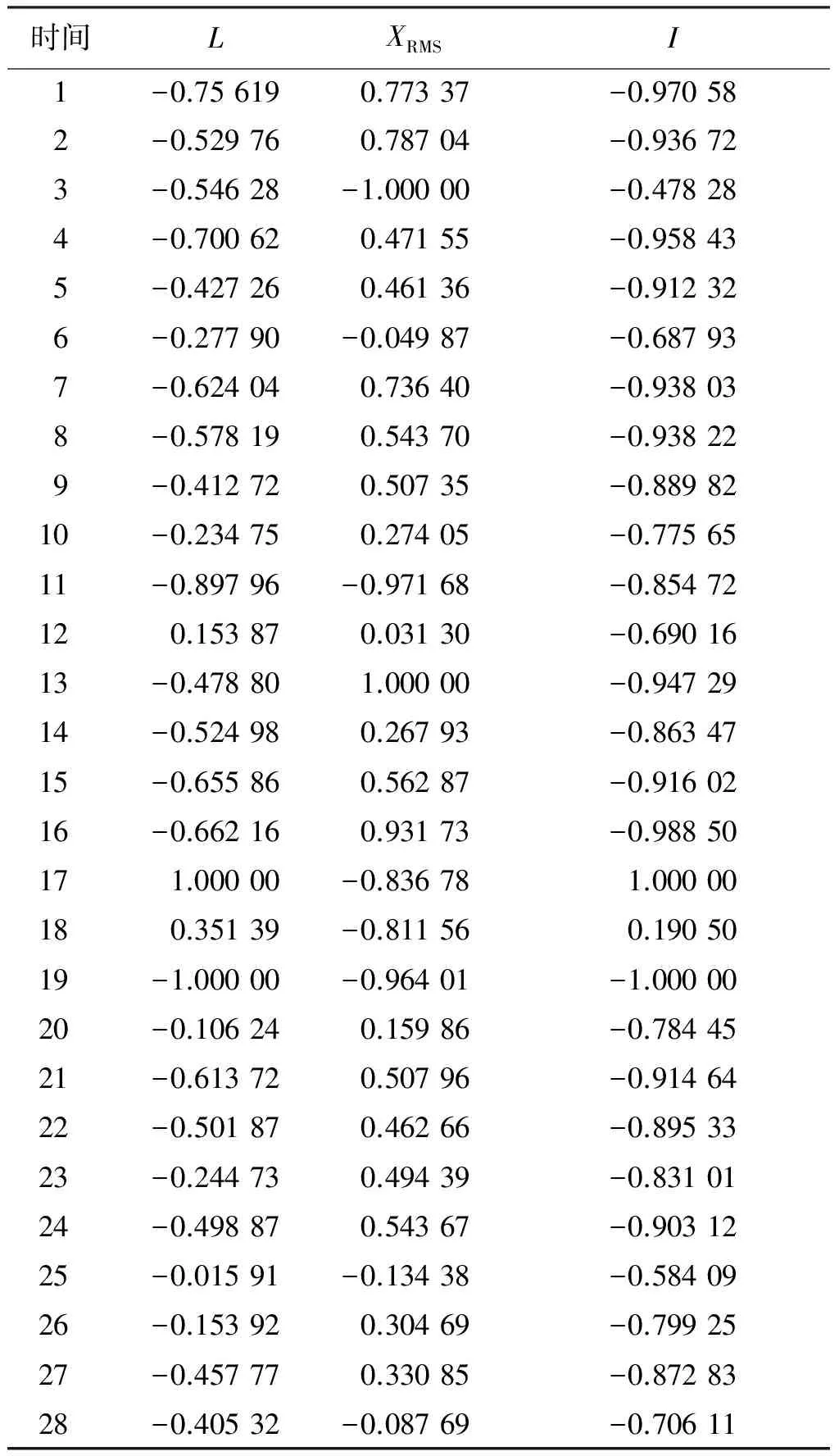
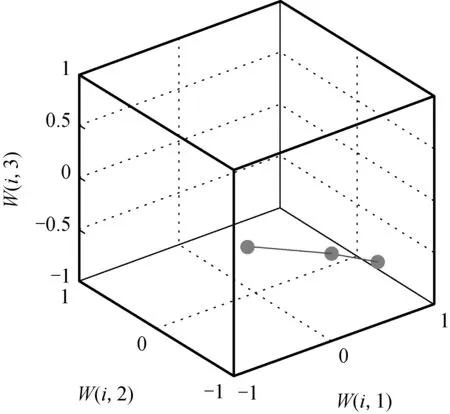
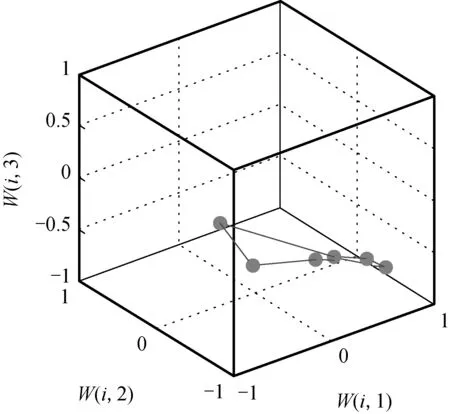
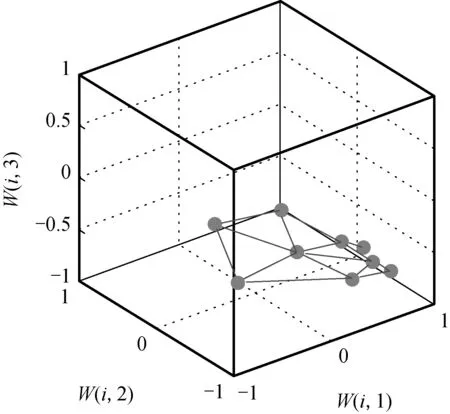
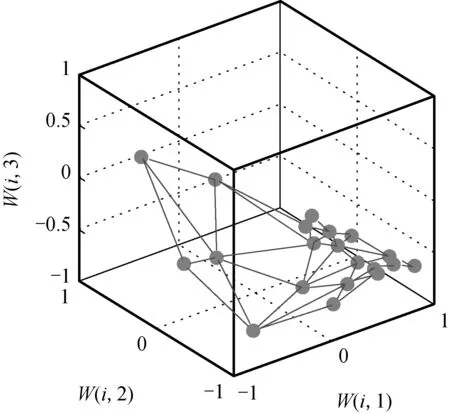
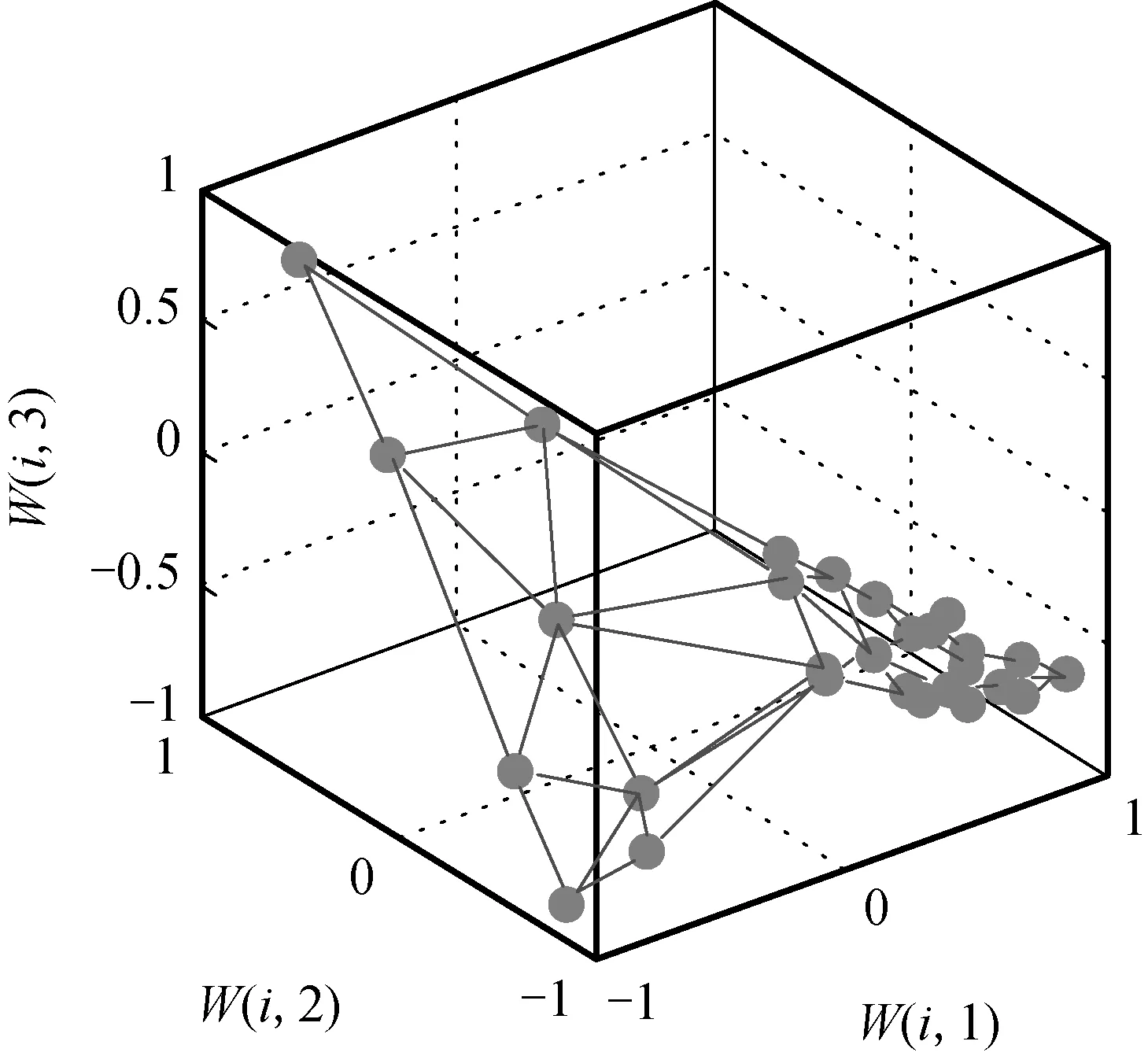
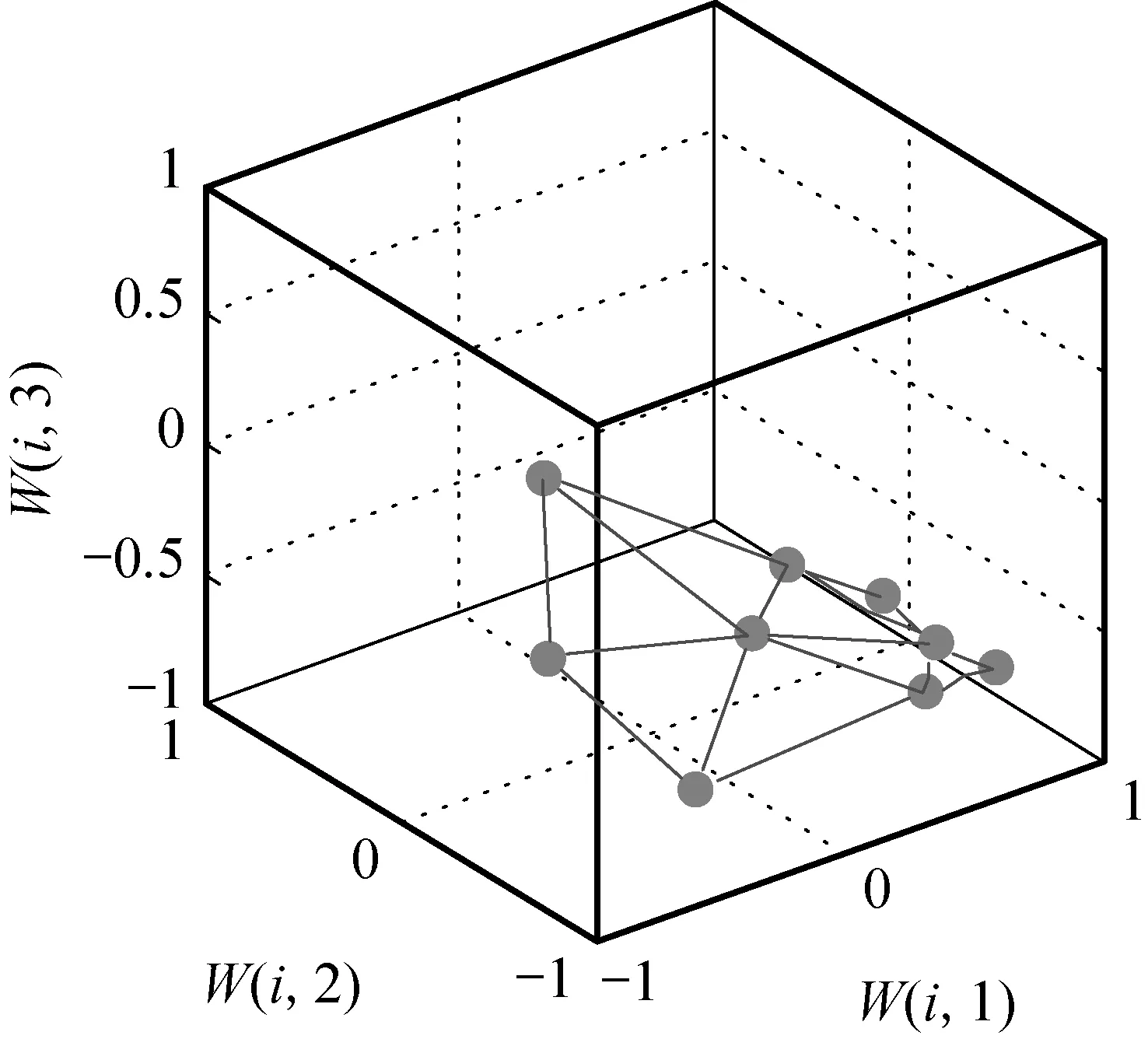
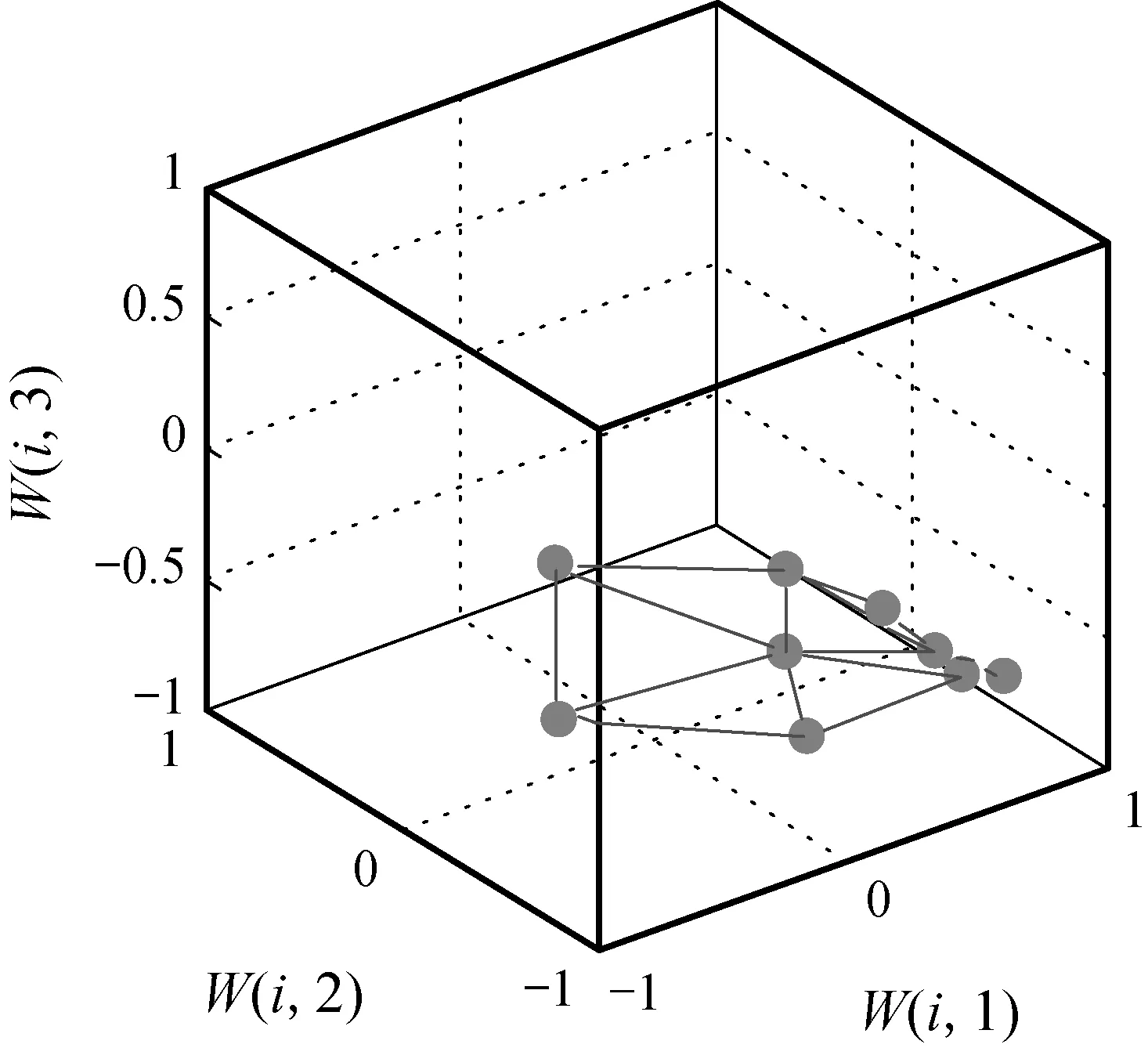
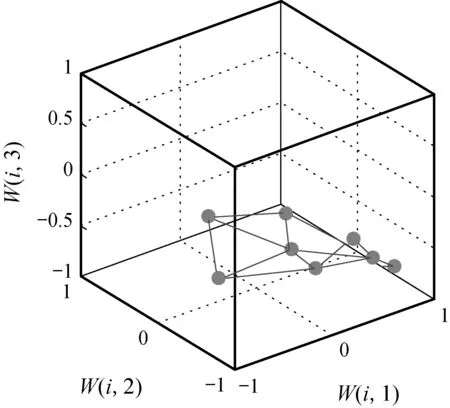
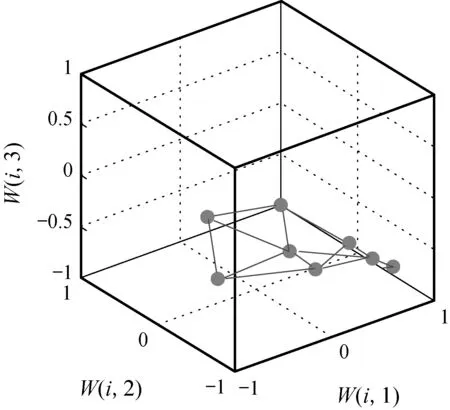
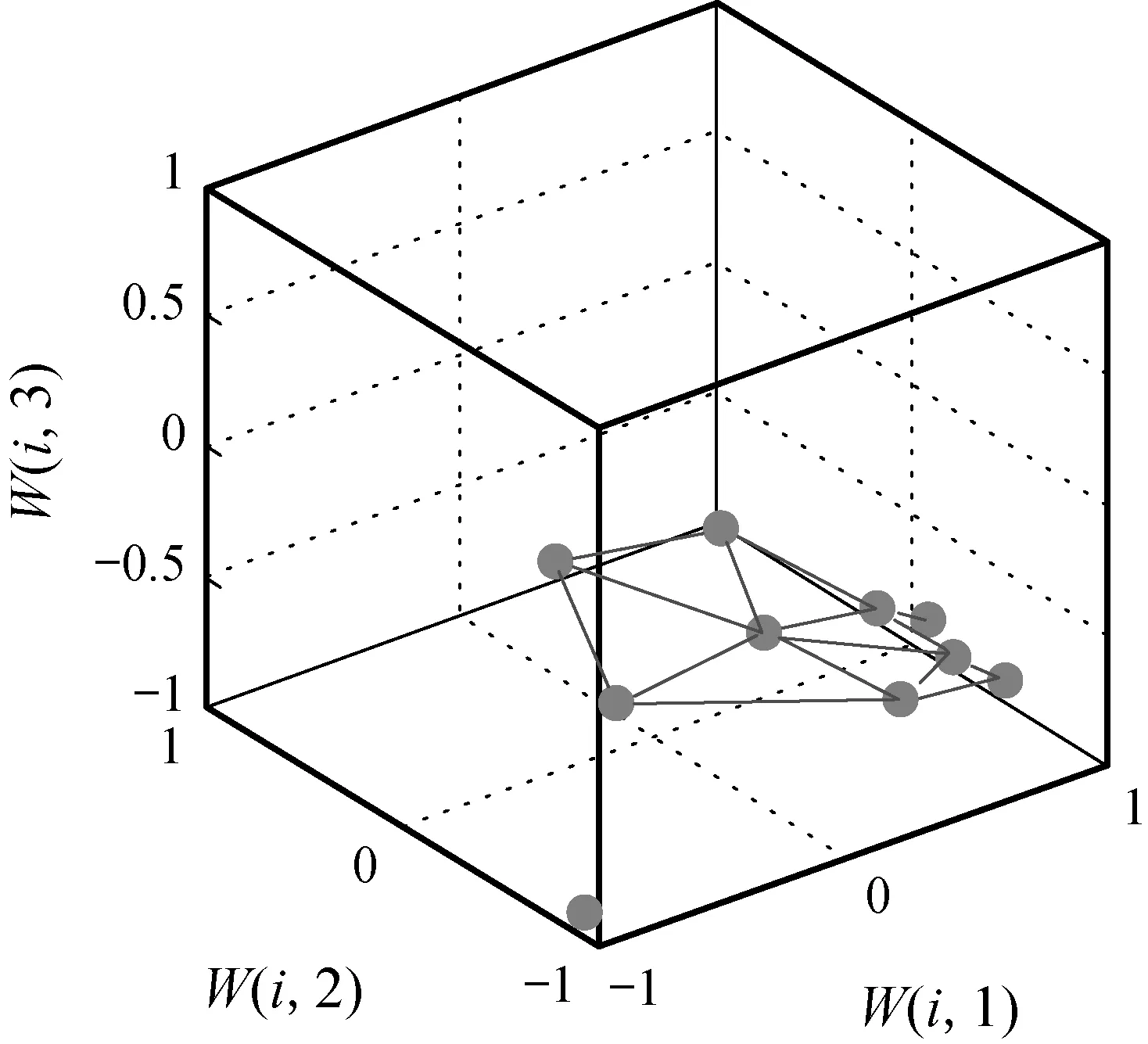
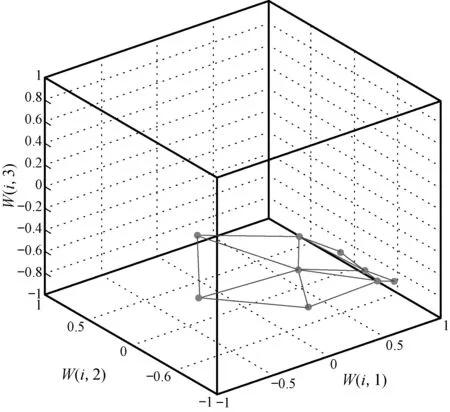
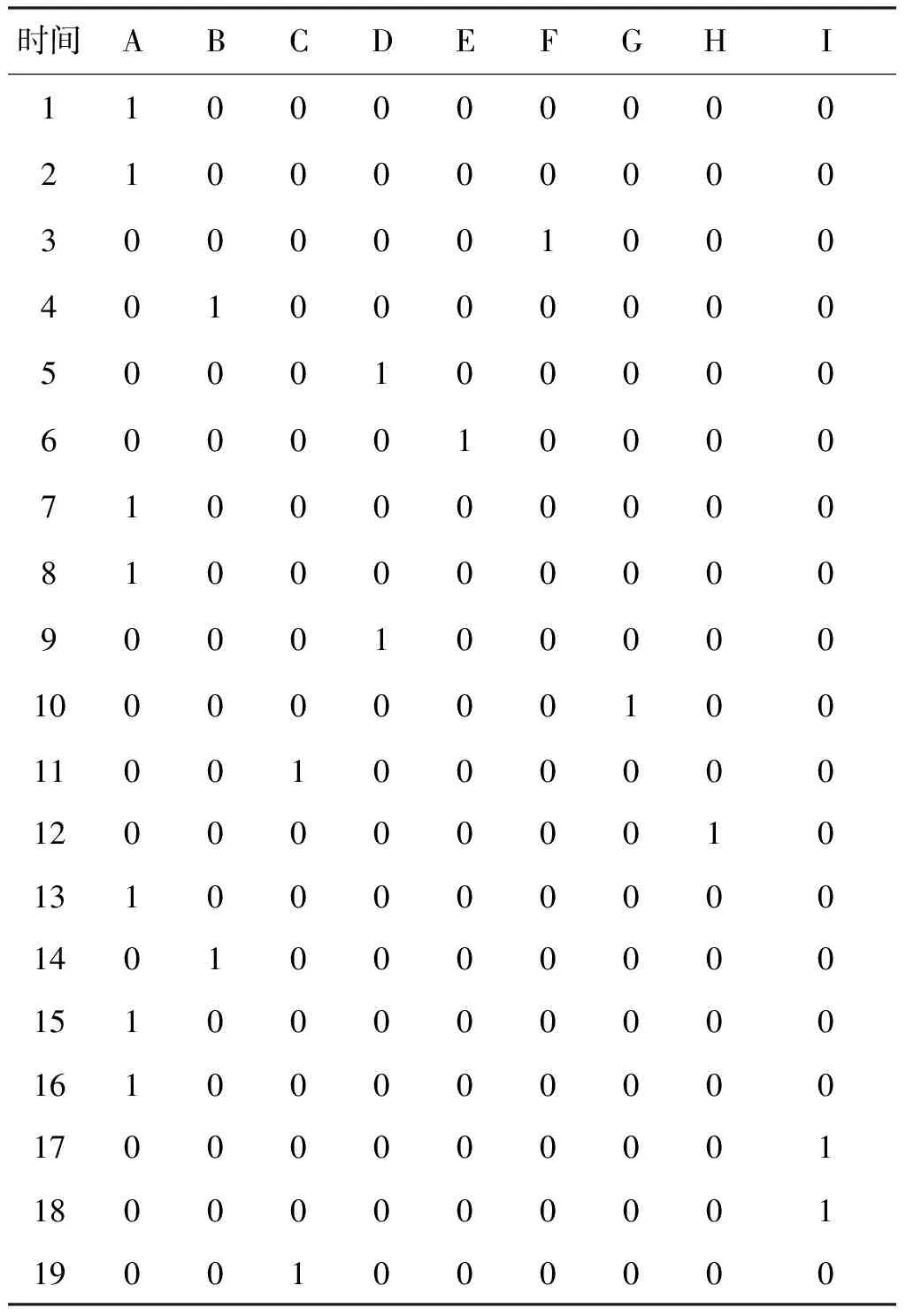
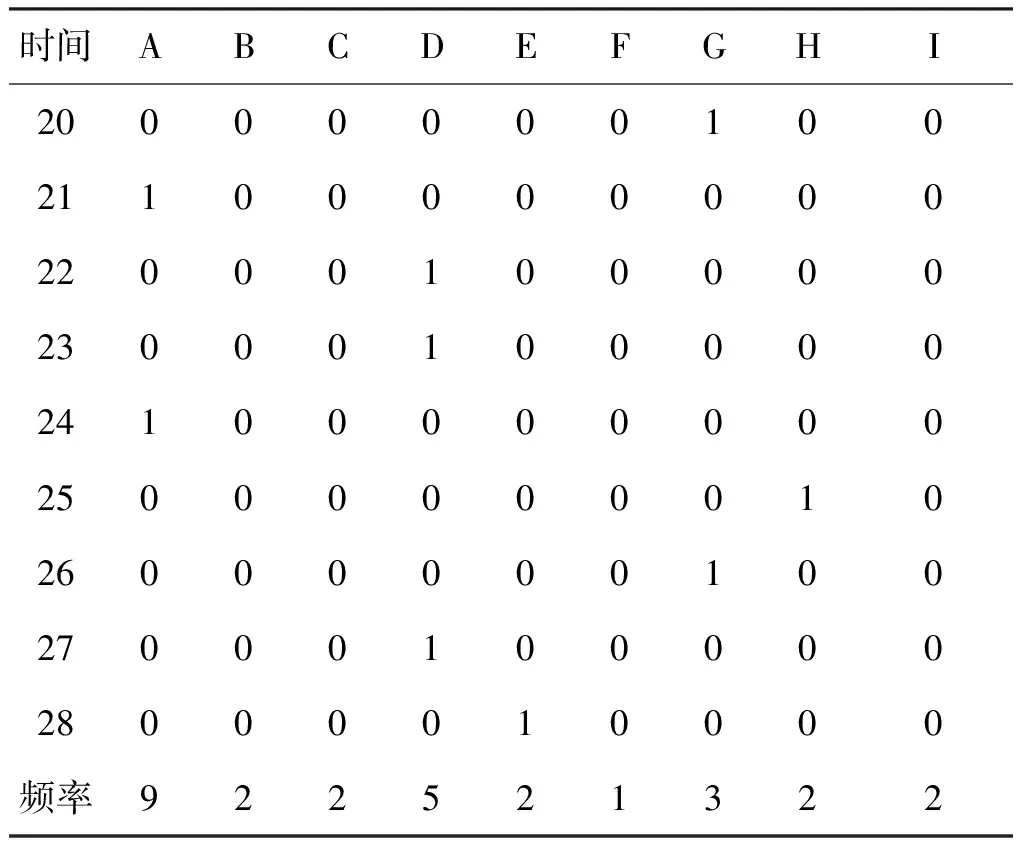
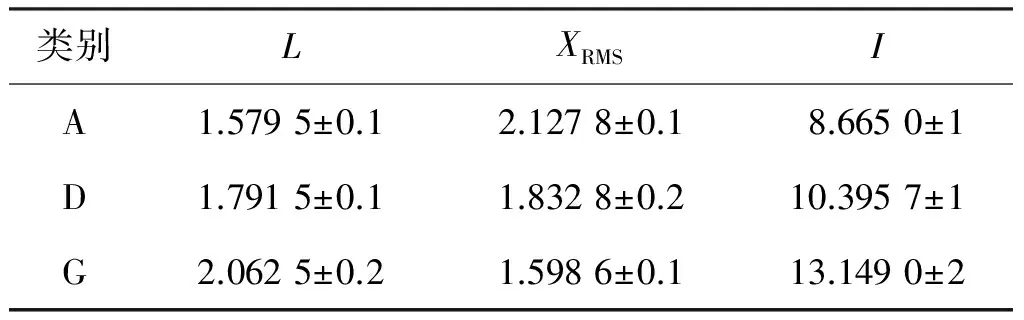
在SOFM模型的学习中, 通常取500 2.1约简数据 在提升电机的监测中, 放置多个加速度传感器,计算采样数据的9个特征值, 即振动速度的方根幅值(Xr)、有效值(XRMS)、偏态指标(K3)、峭度指标(K4)、波形指标(K)、峰值指标(P)、脉冲指标(I)、裕度指标(L)和方差指标(S).各指标的数学表达式如式(1~(9)所示. (1) (2) (3) (4) (5) (6) (7) (8) (9) 式中:xi为采样所得离散数据点;N为一组数据点个数;μx为一组数据点的平均值;σx为一组数据点的标准差. 有效值和方根幅值可以反映能量的大小, 偏态指标和峭度指标能够体现信号偏离正态分布的程度, 峰值指标和脉冲指标反映脉冲振动程度和冲击能量的大小, 裕度指标反映电机对振动故障的敏感度, 波形指标和方差指标反映振动能量的波动程度[6-9].选取岸桥提升电机进行为期28 d的数据采样, 得到相关的特征数据.取样本数据每天4 000组, 对其进行聚类分析和可视化研究.通过属性约简降维, 然后归一化处理得到结果如表1所示. 表1 特征值约简结果Table 1 Reduction results of the eigenvalues 2.2数据聚类分析 利用Matlab实现SOFM算法, 首先对网络拓扑结构进行构建和选择.在对网络拓扑的结构构建中, 根据相关算法和经验, 在经多次调试选择后进行确定.本次构建了6种拓扑结构, 神经元排列顺序分别为1×3、2×3、3×3、4×5、4×7, 取η(t)=0.1, 并使每一种网络结构达到一定的训练次数, 从而使训练后的网络结构趋于稳定, 得到结果如图2所示. (a) 1×3 (b) 2×3 (c) 3×3 (d) 4×3 (e) 4×5 (f) 4×7图2 训练后网络拓扑结构Fig.2 Topology of training network 从图2以及输出结果可知, 当神经元个数过多, 存在神经元利用不充分的问题[10], 为了使网络映射效果更具准确性, 需要选取适当的神经元结构.从图2的聚类空间中可以看出, 数据可以分成3~9类, 网络拓扑结构1×3和2×3不能达到精确分类, 网络拓扑结构4×5和4×7的利用不充分. 为了更准确地表达, 选取神经元排列为3×3的网络拓扑结构进行数据分析. 2.3数据聚类结果 对简化后的数据进行归一化处理, 然后运用SOFM算法处理[11], 取η(t)=0.1, 训练次数Tepochs=[100 500 1 000 2 000 3 000 4 000], 得到不同学习次数后网络拓扑结构如图3所示. (a) 100 (b) 500 (c) 1 000 (d) 2 000 (e) 3 000 (f) 4 000图3 不同学习次数后网络拓扑结构Fig.3 Network topology after different training epochs 为达到良好的训练结果, 从图3中选取训练3 000 次的网络拓扑结构,然后对数据进行处理, 并且学习速率取η(t)=0.1, 得到结果如图4和表2所示. 图4 训练3 000次的网络拓扑结构Fig.4 Network topology of 3 000 training times 时间ABCDEFGHI11000000002100000000300000100040100000005000100000600001000071000000008100000000900010000010000000100110010000001200000001013100000000140100000001510000000016100000000170000000011800000000119001000000 (续 表) 从图4和表2中可以分析出聚类情况, 主要集中在A、D和G类, 其特征向量的裕度指标、有效值和脉冲指标均值如表3所示. 表3 聚类状态指标 Table 3 Clustering state index 从表3中可以看出, 每种状态的一组特征向量都有各自的特点.在一个月内, 由于岸桥都是处在正常的工作范围内, 并未出现故障, 故本次的聚类指标差别不大, 从而验证了网络拓扑结构的正确性.故使用SOFM算法能够实现准确的状态识别和可视化, 并可以对机械状态有更好的监测. 本次数据处理所建立的阈值指标相对保守, 所以确定最大阈值数值时仍需要大量的数据计算, 从而建立阈值指标和标准化的正常机械工作状态的特征参数值.利用本文方法可以建立不同机械的状态数据库, 能够形成优良的规划系统, 从而应用于实际机械状态监测和维护.相比其他机械安全监测方法, 本文方法具有成本低、计算精确, 更适应于工业4.0的智能化处理, 但该方法也需要大量数据支持.当建立一定标准, 以后对其他机械采集数据处理时, 当出现特征向量指标差值超过最大阈值时, 与对应标准比较, 确定此机械的工作状态, 及时发现并检查修理. 本文处理的数据是以天为单位对提升电机的状态进行识别及可视化, 运用自组织映射网络(SOFM)算法, 达到了很准确的聚类和可视化效果, 也可以以小时为单位, 对岸桥电机状态进行更精确的状态识别.对岸桥提升电机状态的数据采集处理, 能够对电机工作状态进行准确的识别, 从而对岸桥提升电机提供更好的监测, 保证提升电机正常稳定的工作, 避免事故的发生. [1] 王志欣. 岸桥机械动态特征信息的数据挖掘与状态识别[D].上海: 上海交通大学机械与动力工程学院, 2008: 79-90. [2] KOHONEN T. The self-organizing map[J]. Neurocomputing. 1998, 21(1): 1-6 [3] KOHONEN T. Self-organized formation of topologically correct feature maps[C]// Neurocomputing: Foundations of Research. MIT Press, 1988. [4] 马勇, 阮洋. 基于改进的SOFM神经网络的矢量量化方法[J]. 计算机工程与科学, 2011, 33(12): 126-129. [5] VESANTO J, ALHONIEMI E. Clustering of the self-organizing map[J]. IEEE Transaction on Neural Networks, 2000, 11(3): 586-600. [6] 肖坤, 原思聪, 王丹. SOM神经网络在旋转机械故障诊断中的应用[J]. 机械设计与制造, 2010(11): 44-46. [7] PENG K C C, SINGHOUSE W. Crane control using machine vision and wand following[C]// Mechatronics 2009. IEEE International Conference on. IEEE, 2009: 1-6. [8] YANG L, OUYANG Z, SHI Y. A modified clustering method based on self-organizing maps and its applications[J]. Procedia Computer Science, 2012, 9(11): 1371-1379. [9] 张袅娜, 王永庆, 李景帅. 基于SOM神经网络的永磁同步电机故障诊断[J]. 吉林大学学报, 2012, 30(6): 555-560. [10] IVRISSIMTZIS I, JEONG W K, SEIDEL H P. Using growing cell structures for surface reconstruction[C]// Shape Modeling International. IEEE Computer Society, 2003: 288. [11] DAI S B, LEI W H, CHENG Y Z, et al. Clustering of DOA data in radar pulse base Don SOFM and CDBW[J]. Journal of Electronics (China), 2014, 31(2): 107-114. (责任编辑:杜佳) StateRecognitionandVisualizationofHoistingMotorofQuaysideContainerCraneBasedonSOFM TANGGang,YANGZhiqi,HUXiong (College of Logistics Engineering, Shanghai Maritime University, Shanghai 201306, China) The neural network structure and algorithm of self-organizing feature map (SOFM) are researched and analyzed. Besides, the SOFM is applied to state recognition and visualization of the quayside hoisting motor. By using SOFM, the clustering and visualization of attribute reduction of data are carried out, and three kinds of motor states are obtained primarily with root mean square, impulse index and margin index, and the simulation visualization interface is realized by Matlab. It can realize accurate identification of the motor state through data processing, which would perform better monitoring to the quayside hoisting motor and provide a new way for the mechanical state recognition. neural network; self-organizing feature map; unsupervised learning; state recognition; visualization 1671-0444 (2017)04-0559-06 2016-12-31 国家自然科学基金资助项目(31300783);中国博士后科学基金资助项目(2014M561458);教育部博士点基金联合资助项目(20123121120004);国家高技术研究发展计划(863)资助项目(2013A2041106);上海海事大学科研基金资助项目(20130474);上海高校一流学科—管理科学与工程;上海市自然科学基金资助项目(13ZR1419200);国家重点基础研究发展计划(973)资助项目(2011CB711000) 唐 刚(1982—),男,重庆人,副教授,博士,研究方向为人机工程. E-mail: gangtang@shmtu.edu.cn2 岸桥提升电机机械状态聚类分析



3 结 语
猜你喜欢
数学杂志(2022年4期)2022-09-27
网络安全与数据管理(2022年2期)2022-05-23
电子制作(2018年23期)2018-12-26
现代装饰(2018年5期)2018-05-26
自动化学报(2017年11期)2017-04-04
汽车维修技师(2017年10期)2017-03-17
电测与仪表(2016年5期)2016-04-22
中国生化药物杂志(2015年4期)2015-07-07
弹箭与制导学报(2015年1期)2015-03-11
郑州大学学报(医学版)(2015年2期)2015-02-27