
太阳翼驱动机构的扰振力矩测试与分析
2017-11-08 11:54陈江攀张为雯
环境技术 2017年4期
陈江攀,王 冬,刘 艳,张为雯,刘 艺
(北京电子工程总体研究所,北京 100854)
太阳翼驱动机构的扰振力矩测试与分析
陈江攀,王 冬,刘 艳,张为雯,刘 艺
(北京电子工程总体研究所,北京 100854)
为了研究太阳翼驱动机构(solar array drive assembly,SADA)驱动太阳翼运行期间所产生的扰振力矩特性,设计了一套地面测试系统,包括应变式微振动测试平台、柔性负载以及模拟SADA在轨无重力工作环境的重力卸载装置。阐述了所设计测试系统的工作原理,并利用该测试系统进行了试验测试。测试结果表明:SADA驱动柔性负载运行期间所产生扰振力矩的扰振频率成分主要包含两部分,即:1)SADA驱动柔性负载耦合系统的低阶扭转固有频率;2)SADA电脉冲信号的输入频率及其高阶谐波。
太阳翼驱动机构;扰振力矩;应变式微振动测试平台;柔性负载;重力卸载装置
引言
航天器在轨运行期间所产的微振动会对其成像质量和指向精度等关键工作性能产生较大的影响。航天器上存在较多的微振动源,如动量轮、控制力矩陀螺以及SADA等[1,2]。近年来,国内外学者针对动量轮和控制力矩陀螺的微振动特性,开展了大量成果显著的研究工作。但受限于三方面的原因,目前有关SADA驱动太阳翼耦合系统所产生微振动的试验测试研究仍处于初始阶段。首先,太阳翼是一个典型的结构大、柔度大、质量/惯量大且阻尼较弱的柔性装置[3],在重力环境下难以直接展开并参与试验测试;其次,与航天器在轨工作环境不同,地面环境存在空气阻力,SADA驱动太阳翼在两种工作环境下所产生的微振动大相径庭,地面测试结果无法有效预测其在轨状态;最后,目前国内外应用广泛的压电式微振动测试平台低频响应特性较差[4],无法精确测试SADA驱动太阳翼耦合系统所产生的低频微振动。此外,文献[5]指出,SADA驱动太阳翼耦合系统所产生的微振动主要表现为扰振力矩分量。综上所述,亟需开展SADA驱动太阳翼耦合系统所产生扰振力矩的试验测试研究。为此,本研究设计了一套地面测试SADA扰振力矩特性的测试系统,并利用该测试系统对SADA驱动柔性负载运行期间所产生的扰振力矩进行了测试和分析。本研究所得的结论,对预测SADA驱动太阳翼在轨运行期间所产生的扰振力矩具有一定的帮助。
1 测试系统工作原理
本研究所设计的地面测试系统是由应变式微振动测试平台、柔性负载以及重力卸载装置3部分组成,下面分别对各部分的工作原理进行说明。
1.1 应变式微振动测试平台
应变式微振动测试平台主要由8个双孔梁应变式力传感器(S1~S8)、负载盘以及平台外壳组成,其照片以及内部结构示意图参见图1。
图1中,负载盘用于安装被测活动部件,选用中间开大圆孔的厚铝板,其特点是接口灵活且刚度高;平台外壳不仅用于支撑和保护传感器,还起到连接测试平台与刚性基础的作用,采用铝板组装而成,在保证刚度的前提下尽量降低质量,以便于搬运。而对于双孔梁应变式力传感器而言,如图1所示,其结构形式为在板状梁上开有4个圆弧孔。当在梁的端部作用集中力时,4个圆弧孔均承受弯曲变形,此时,若将4片应变片分别粘贴在4个圆弧孔的外壁上,则恰有两片处于正应力区,两片处于负应力区,故所粘贴的4片应变片恰好组成了一个等臂对称全桥测量电路。此外,为了结构对称和便于安装,S1~S4均为一根双孔梁,而S5~S8则均由两根双孔梁组成。
综上所述,当被测活动部件安装在应变式微振动测试平台的负载盘上工作时,活动部件所产生的微振动会以空间正交的3个扰振力(Fx、Fy和Fz)和3个扰振力矩(Mx、My和Mz)的形式作用在负载盘的几何中心,并通过负载盘分解到8个双孔梁应变式力传感器上,此时,S1~S8则会输出与所受外力成正比的电压。其中,双孔梁应变式力传感器S1和S3可实现对Fx和Mz分量的测试,S2和S4可实现对Fy和Mz分量的测试,S5~S8则可实现对Fz、Mx和My3个分量的测试,故该测试平台具备测试航天器活动部件6分量扰振特性的能力。此外,由图1还可知,应变式微振动测试平台的内部是一个空腔,被测活动部件既可以安装在测试平台外部也可以安装在其内部,即该测试平台具有接口灵活的优势。
另外,应变式微振动测试平台的标定方法参见文献[6]。
1.2 柔性负载
柔性负载是由支架钢梁、薄铝板(1 000 mm×800 mm×1 mm)以及4根配重钢梁(800 mm×30 mm×15 mm)组成,其照片以及在固支边界条件下前3阶模态测试结果分别参见图2和图3。
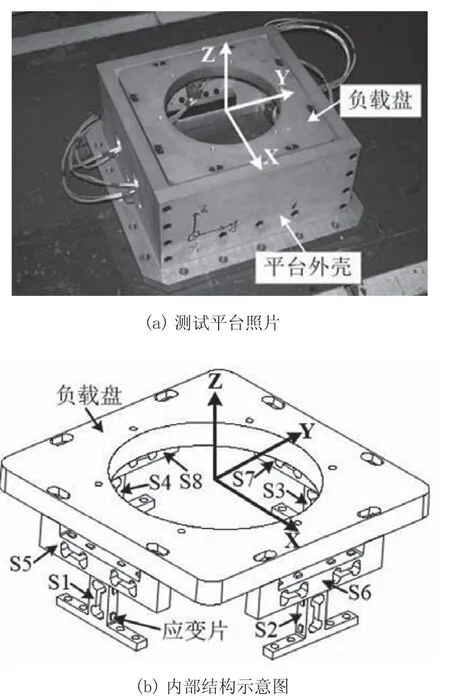
图1 应变式微振动测试平台照片及内部结构示意图
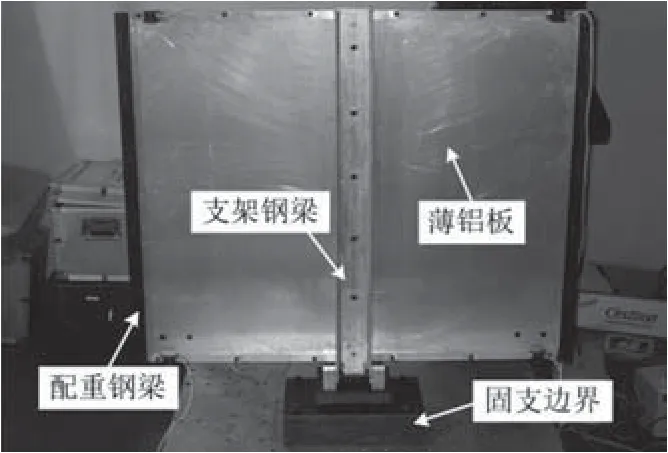
图2 柔性负载照片
由图3所示的模态测试结果可知,柔性负载低频区模态密集,且其1阶模态为扭转模态,对应的固有频率为1.153 Hz,处于低频区。因此,该柔性负载可用于研究SADA驱动太阳翼耦合系统的扰振力矩特性。
1.3 重力卸载装置
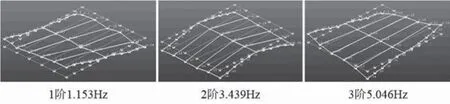
图3 柔性负载模态测试结果
与动量轮和控制力矩陀螺等活动部件不同,开展地面试验对SADA驱动负载耦合系统的微振动特性进行测试时,由于负载的重力会通过SADA传递至测试平台,故负载重力会对SADA运行过程中的摩擦特性产生影响,从而使其与在轨工作环境不同。为了模拟SADA在轨的无重力工作环境,研制了一套重力卸载装置,其照片参见图4。
由图4可知,重力卸载装置主要由水平/高度调节装置、卸载支架、传动轴以及气浮轴承4部分组成。4部分的主要功能分别为:
1)水平/高度调节装置。该装置安装于卸载支架和刚性基础之间。首先,在刚性基础的安装面固定4块上表面具有球面凹槽的钢砖,且钢砖位置与卸载支架的4条支腿一一对应;然后,通过4根旋转螺杆对卸载支架进行支撑,旋转螺杆底端设计成半球状且恰好支撑在钢砖上表面的球面凹槽里,上端则拧入卸载支架四条支腿的内螺纹中,故通过转动4根旋转螺杆即可调整卸载支架的水平度和高度;最后,待卸载支架的水平度和高度满足要求后,再通过螺栓将卸载支架的4条支腿与对应的钢砖进行刚性连接。综上所述,该装置既可调整卸载支架的水平度和高度,又可保证卸载支架的安装刚度。
2)卸载支架。卸载支架的主要作用是支撑和固定气浮轴承的定子,并将气浮轴承定子所受的外力传递至刚性基础。
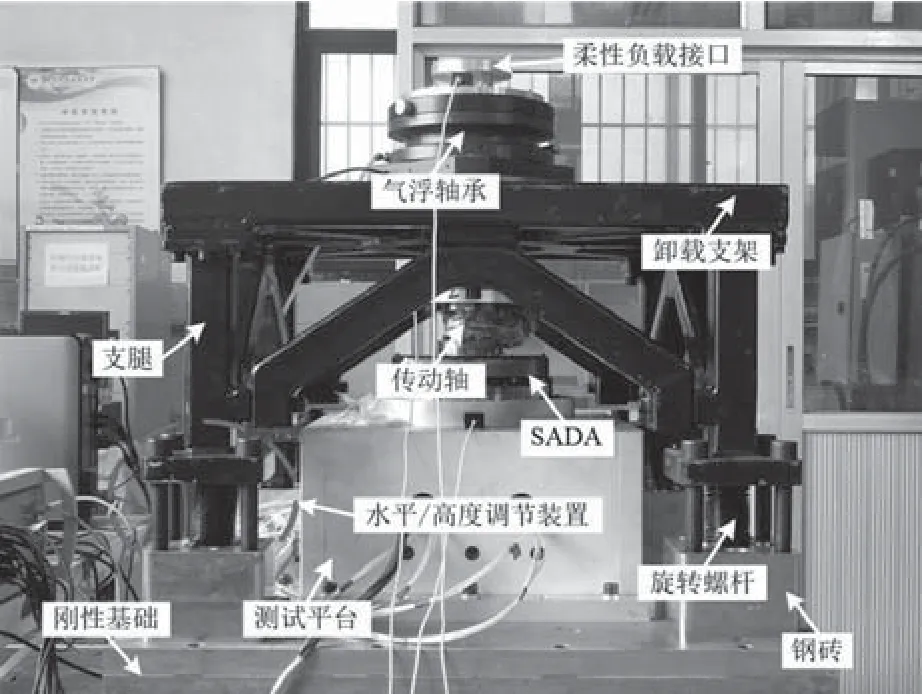
图4 重力卸载装置照片
3)传动轴。传动轴的主要作用是将气浮轴承转子的下端与SADA进行连接,从而将气浮轴承转子上端所连负载的转动惯量传递给SADA。
4)气浮轴承。气浮轴承的主要作用是卸载SADA所驱负载的重力,其定子与卸载支架固连,转子的上下两端分别与负载和传动轴固连。气浮轴承的工作原理为:当其充气工作时,转子处于悬浮状态,和定子无直接接触且相对于定子可自由旋转。故SADA通过气浮轴承驱动负载运行时,负载的重力通过气浮轴承的定子和卸载支架传递至刚性基础,而转动惯量则通过转子和传动轴传递给SADA,从而在不影响转动惯量传递的同时实现重力卸载。
值得注意的是,由于气浮轴承是由气泵提供高压气体,而气泵的压缩机在工作时会导致其输出的高压气体有脉动现象,脉动现象会直接对气浮轴承的工作性能以及试验的测试结果产生影响。因此,在测试过程中,当气泵储气罐内的气压达到设定值压缩机停止工作时,可进行测试,而当气泵储气罐内气压过低压缩机开始工作时,应停止测试。此外,在压缩机停止工作的状态下进行测试,背景噪声水平明显降低,有利于提高测试精度。
2 测试结果与分析
本研究所讨论的SADA是由两部分组成,即驱动源(两相混合式步进电机)以及两级直齿轮减速装置(总减速比为100)。在此基础上,利用所设计的地面测试系统,对该SADA驱动图2所示柔性负载运行期间所产生的扰振力矩进行了测试。扰振力矩测试结果参见图5。
由图5所示的测试结果可知,在0~50 Hz的频带内,SADA驱动图2所示柔性负载运行期间所产生扰振力矩的扰振频率有4个,即1.156 Hz、14.8 Hz、29.59 Hz以及44.38 Hz。由于SADA的减速比为100,故SADA内部转子和定子间的电磁刚度[6]相对于柔性负载而言,可等效为固支边界。因此,扰振频率中的1.156 Hz为SADA驱动柔性负载耦合系统的1阶扭转固有频率。而对于14.8 Hz而言,其为SADA电脉冲信号的输入频率,故29.59 Hz和44.38 Hz则分别为14.8 Hz的2阶和3阶谐波。其中,SADA电脉冲信号输入频率fd的计算公式为:

式中:h、ωc、z、p以及n分别为SADA的总减速比、巡航速度、转子齿数、运行拍数以及细分数,且5者对应的数值分别为100、7.26×10-5rad、50、4以及64,代入式(1)可得:

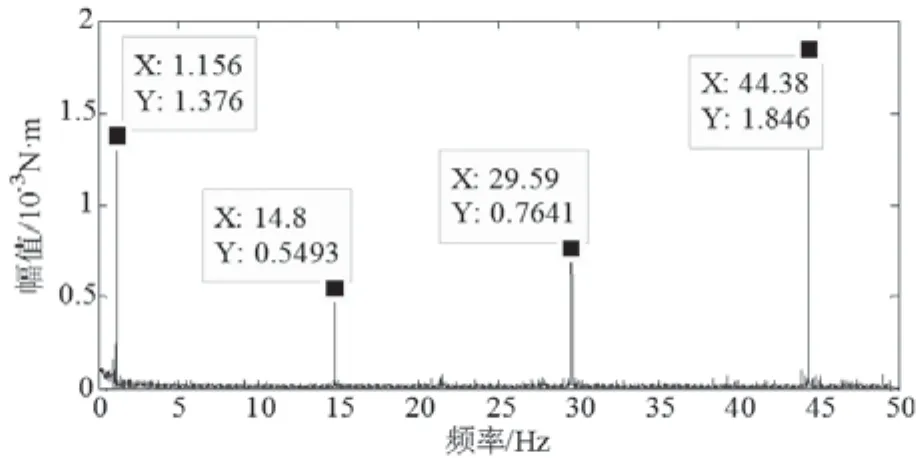
图5 扰振力矩测试结果
3 结论
本研究设计了一套地面测试SADA扰振力矩特性的测试系统,介绍了该测试系统各部分的工作原理,并利用该测试系统对SADA驱动柔性负载运行期间所产生的扰振力矩进行了测试和分析。结果表明:SADA驱动柔性负载运行期间所产生扰振力矩的扰振频率成分主要包含两部分,即:1)SADA驱动柔性负载耦合系统的低阶扭转固有频率;2)SADA电脉冲信号的输入频率及其高阶谐波。本研究所得的结论具有一定的工程应用价值。
[1] 孟光, 周徐斌, 苗军. 航天重大工程中的力学问题[J]. 力学进展,2016, 46(1):267-322.
[2] 庞世伟, 潘腾, 毛一岚,等. 某型号卫星微振动试验研究及验证[J].航天器环境工程, 2016, 33(3):305-311.
[3] 陈亚梅. 应用形状记忆合金的太阳帆板的振动控制[J]. 机械工程与自动化, 2010(1):173-175.
[4] Chen J P, Cheng W. Low-frequency compensation of piezoelectric micro-vibration test platform[J]. Tehnicki Vjesnik-Technical Gazette, 2016, 23: 1251-1258.
[5] 朱仕尧, 谢燕, 雷勇军. 太阳能电池阵跟踪驱动过程扰振特性分析[J]. 国防科技大学学报, 2014(1):27-33.
[6] Chen J P, Cheng W, Li M. Modeling, measurement and simulation of the disturbance torque generated via solar array drive assembly[J]. Science China Technological Sciences, 2017:1-17.
Measurement and Analysis of the Disturbance Torque Generated via Solar Array Drive Assembly
CHEN Jiang-pan,WANG Dong,LIU Yan,ZHANG Wei-wen,LIU Yi
(Beijing Institute of Electronic System Engineering, Beijing 100854)
For investigating the disturbance torque aroused via solar array drive assembly (SADA), a set of ground measurement system is designed in this work, which is composed of strain-effect microvibration measurement platform, flexible load and gravity unloading device used to simulate the nongravity working environment of SADA running on orbit. The working principle of the ground measurement system is demonstrated and the experimental measurement is carried out on the basis of the designed measurement system. All the results show that, the disturbance frequency of the disturbance torque aroused by SADA driving a flexible system is mainly consisting of two parts: 1) the low order torsional natural frequency of the coupling structure; 2) the input frequency of the digital pulse signal and its harmonics.
solar array drive assembly; disturbance torque; strain-effect micro-vibration measurement platform; flexible load; gravity unloading device
TH113.1;V414
A
1004-7204(2017)04-0139-04
陈江攀(1988.04),男,博士,研究方向:结构动力学。
猜你喜欢
科学大众(2022年23期)2023-01-30
机械工业标准化与质量(2022年9期)2022-09-30
中国特种设备安全(2022年2期)2022-07-08
石油沥青(2021年5期)2021-12-02
中华养生保健(2020年10期)2021-01-18
文化创新比较研究(2020年7期)2021-01-13
科普童话·神秘大侦探(2020年3期)2020-05-11
山东青年(2016年12期)2017-03-02
小天使·一年级语数英综合(2016年9期)2016-05-14
航天制造技术(2016年6期)2016-05-09
