地基长波授时系统/GNSS组合定位技术研究
2017-11-22 05:35刘音华李孝辉刘长虹李实锋
时间频率学报 2017年3期
刘音华,李孝辉,刘长虹,李实锋
地基长波授时系统/GNSS组合定位技术研究
刘音华1,2,3,李孝辉1,2,4,刘长虹1,李实锋1
(1. 中国科学院 国家授时中心,西安 710600;2. 中国科学院 精密导航定位与定时技术重点实验室,西安 710600;3. 中国科学院大学,北京 100049;4. 中国科学院大学 天文与空间科学学院,北京 100049)
GNSS星基导航系统易受敌方干扰,且易受遮挡,使其在军事应用中存在较大的风险和局限性。地基长波授时系统具有发射功率大、抗电磁干扰强等优势,且长波发射台可以当作GNSS系统的伪卫星来使用。因此,长波授时系统和GNSS系统进行组合定位取长补短,可以大大提高导航系统的可用性,降低在军事应用中的风险。首先从性能上分析两个系统进行组合定位的可行性;再从理论上对双系统组合定位方法进行研究,并提出校正—融合的组合定位算法用以修正长波授时系统的系统误差,进一步优化组合定位性能;然后,以西安为例分析长波授时系统和北斗系统组合定位对几何精度因子的改善情况;最后,基于实测数据研究长波授时系统和北斗系统组合定位性能。研究结果表明,地基长波授时系统与北斗组合定位,能大大改善几何精度因子,对多遮挡环境下的改善尤为明显。采用笔者提出的组合定位算法,基于北斗伪码接收机可以达到数十米量级的定位精度,相比北斗单系统导航组合定位精度有一定恶化,但是如果后期对长波数据增加平滑滤波处理,组合定位性能会进一步提升。
GNSS;长波授时;组合定位;DOP;定位精度
0 引言
GNSS系统是目前业界公认的高精度、高可靠性,可以实现全天侯、全天时、全球范围导航的星基导航系统,但是基于GNSS导航系统的技术特征,它们在空间区段、运行与控制区段、用户区段都可能遭受敌方干扰,尤其在用户区段抗电磁干扰能力弱[1-2]。因为GNSS卫星只有几十瓦的发射功率,并且需要经过几万千米的距离到达地球表面的接收机,而干扰信号距接收机可能近得多,功率也可能大很多,在复杂电磁环境下星基导航的性能会大打折扣[3]。此外,GNSS系统具有高频段、短波长、对大建筑物绕射能力差的特点,在大建筑物密集区域的导航性能也会受到影响。因此,单独把GNSS作为各国的军事支撑存在较大的风险和局限性,需要有其他导航系统进行辅助以提高其可用性和可靠性。目前,美国、欧盟、韩国等都已经启动Loran系统的重建工作,计划把Loran系统作为GNSS系统的备份和增强系统。
中国的BPL和长河二号属于地基长波授时系统,是大功率陆基无线电系统,以Loran-C作为其信号体制,与GNSS系统的技术特征有明显不同,可以归纳为陆基对星基、低频对高频、高信号电平对低信号电平等三大技术差别。长波授时系统的技术特征使其具有很强的抗干扰能力和对大建筑物的高绕射能力。在完成了长波发射台系统时间和UTC(NTSC)的同步之后,长波发射台可以当作GNSS系统的伪卫星来使用[4],使得长波授时系统与GNSS系统组合定位成为可能[5]。由于长波授时系统以Loran-C作为其信号体制,Loran系统进行导航精度较低也是业界公知的,定位误差在百米量级[6-8],所以传统认为长波授时系统不能与GNSS系统进行组合定位,否则会降低导航性能。但是,Loran系统的重复精度却比绝对精度高很多,地基长波授时系统的重复精度在纳秒量级,和GNSS系统授时精度在同一个量级。如果采取合适而有效的方法进行系统误差的校正,长波授时系统是可以和GNSS系统进行组合定位的,从而充分利用长波授时系统的优势来弥补GNSS系统的一些缺陷,增强GNSS系统的可用性和可靠性。
为克服长波授时系统绝对精度低的问题,本文提出了校正—融合的组合定位算法用以修正长波授时系统的系统误差,从而充分利用长波授时系统重复精度高的优势来提高组合定位性能。此外,以西安为例分析了长波授时系统和北斗系统组合定位对几何精度因子的改善情况,并基于实测数据研究了长波授时系统和北斗系统组合定位的性能,并与北斗单系统定位结果进行了对比。
1 长波授时特点
BPL长波授时系统是陆基无线电授时系统,其发播信号采用国际通用的Loran-C信号体制。为了进一步发挥我国Loran-C资源优势,提升长波授时系统的功能与性能,中国科学院国家授时中心于2008年完成了长波授时系统现代化技术升级改造。目前长波授时系统的主要指标为:发射频率100 kHz、辐射功率800 kW、地波信号覆盖范围1 000~2 000 km、天波信号覆盖范围为3 000 km、地波授时精度在0.5~0.7μs量级、天波授时精度在1μs量级。
长波授时精度在微秒量级,而GNSS卫星单向授时精度在几十纳秒量级,两者相差甚远,但这是指授时的绝对精度。在授时的重复精度方面,差距有很大程度的缩小。图1是在临潼接收蒲城长波发射台数据的2 h授时结果,可以看出图中授时数据波动比较均匀,标准偏差为13.4 ns,最大值与最小值之差为80.5ns。图2为临潼北斗接收机2h授时结果,北斗授时的标准偏差为6.5ns,最大值与最小值之差为34.9 ns,尽管数据曲线较长波数据要平滑许多,但统计结果和长波数据仍在同一个数量级。因此可以看出,2h的长波授时的重复精度在10ns量级,和北斗单系统授时精度差别不大。

图1 长波2h授时结果

图2 北斗2h授时结果
图3为临潼长波接收机接收蒲城长波发射台数据的24 h授时结果。图3与图1进行比较可以看出,24 h的授时数据统计特性与2h基本相当,24h的授时结果的标准偏差为13.7ns,与2h的标准偏差仅相差0.3ns;24 h授时结果的最大值与最小值之差为87.5ns,与2h的结果相差7ns。因此,长波授时高精度的重复特性使得其可以与GNSS卫星导航系统进行组合定位,但是前提是要采取额外的方法进行系统误差的校正,通过系统误差的校正来弥补长波授时绝对精度低的缺陷,从而充分利用长波授时重复精度高的优势。

图3 长波24h授时结果
2 长波授时系统/GNSS组合定位方法
下面以北斗系统为例,来说明GNSS系统与长波授时系统进行组合定位的方法,并详细介绍本文采用的长波授时数据的系统误差进行修正方法,本方法也适用于其他Loran系统与GNSS系统的组合定位。
2.1 组合定位数学模型
以3颗北斗卫星和一个长波发射台进行组合定位为例来研究组合定位数学模型。北斗和长波系统的伪距观测方程如式(1)所示:





大地经纬度和球面经纬度的转换可以通过式(4)来进行。,分别为参考椭球的长半轴与短半轴:

式(5)中,为接收机高程,为卯酉圈曲率半径,为椭球偏心率,分别可以按照以下式(6)和(7)计算:

对方程组(1)进行微分运算,则有:
而
根据式(2),则有:

根据式(5),可以得到式(11)~(16):



根据式(3),则有:

根据式(9)、(10)和(11),可以得到长波系统伪距方程的微分方程。联合北斗伪距方程的微分方程,可以得到式(18):

式(18)中




因此,可以得到式(25):
之后就可以利用迭代法进行北斗和长波授时系统组合定位接收机坐标求解。
2.2 长波授时数据系统误差校正方法
长波授时绝对精度主要受限于ASF附加二次相位因子修正误差、时钟同步误差、发射和接收设备时延标定误差等等,这些误差都可以认为是系统差,在组合定位解算时可以通过采取额外的校正方法对其进行校正从而改善组合定位绝对精度。
本文提出校正—融合的方法来进行长波授时数据系统误差的校正,采用北斗系统来标校长波授时系统的系统误差,然后再进行两个导航系统数据的融合处理,得到组合定位的定位结果。因此,数据处理分为两个过程:一个为校正的过程,在校正时采用北斗单系统进行一段时间的定位,获得北斗单系统定位结果,用该结果来修正长波数据的系统误差;另一个为长波授时系统和北斗双系统数据融合的过程,在该过程中融合北斗和长波数据,利用2.1节的组合定位数学模型进行定位解算,但是在每次迭代求解接收机坐标时都需要进行长波数据系统误差的修正。




3 组合定位几何精度因子的改善
GNSS导航系统的定位精度一方面由用户等效距离误差(UERE)决定,另一方面由卫星的几何布局决定[9],几何精度因子GDOP是衡量卫星几何布局优劣的一个物理量。一般情况下,在GDOP<5的区域,属于高精度区;在5
对于GPS系统,由于其建设时间长,在轨可用卫星较多,除非在遮挡严重的区域,星座几何分布较好,GDOP值较低。但是北斗系统还处在加速建设阶段,在轨可用卫星数目少于GPS系统,且许多卫星是GEO和IGSO卫星,因而在高纬度地区和遮挡严重的区域可视卫星数目偏少,GDOP值较高。此时,结合地基长波发射台进行组合定位,把地基长波发射台当作一颗伪卫星来使用,可以大大改善星座几何布局,降低GDOP。
GNSS与长波授时系统组合定位DOP值的计算公式见式(29)~(35)。其中,式(29)由式(19)~(24)推导得来。式(35)中,为光速。



我们以北斗和蒲城长波发射台组合定位为例,基于临潼北斗伪码接收机和长波接收机北京时间2015-04-09 12:30~15:30的观测数据进行DOP值解算,分析了西安地区组合定位对几何精度因子的改善程度,包括对GDOP,PDOP,HDOP,VDOP和TDOP的分析。在分析几何精度因子的改善情况时,以不同的卫星高度角来模拟开阔环境和多遮挡环境,以高度角大于5°作为限制条件来模拟开阔环境,以高度角大于35°作为限制条件来模拟多遮挡环境,对比组合定位在两种环境下的改善程度。
图4为西安地区24h组合定位和北斗单系统GDOP对比分析结果,其中图4(a)为开阔环境对比结果,图4(b)为多遮挡环境对比结果。从图中明显可以看出,不论是开阔环境还是多遮挡环境,组合定位的几何精度因子GDOP均优于北斗单系统GDOP。由于开阔环境下西安北斗单系统的星座几何布局较好,GDOP值本身就很小,改善幅度没有多遮挡环境大。在多遮挡环境下,1 d中大多数时候GDOP值是大于5的,还有大于10的时候,不属于高精度定位区域,引入地基长波发射台进行组合定位可以大大优化几何精度因子,使其值都小于5,从图4(b)估计组合定位GDOP值均小于3。

图4 西安24 h几何精度因子(GDOP)对比曲线
图5为西安地区24 h组合定位和北斗单系统位置精度因子PDOP对比分析结果。从图5中明显可以看出,不论是开阔环境还是多遮挡环境,组合定位的位置精度因子PDOP均优于北斗单系统PDOP。尤其在多遮挡环境下,组合定位对PDOP的改善程度更加明显。
图6为西安地区组合定位和北斗单系统水平精度因子HDOP对比分析结果。同GDOP和PDOP一样,组合定位对HDOP也有明显的改善,尤其是多遮挡环境。
图7为西安地区组合定位和北斗单系统垂直精度因子VDOP对比分析结果。VDOP分析结果与GDOP,PDOP和HDOP不同,在开阔环境下北斗单系统和组合定位的垂直精度因子曲线几乎重合,即在开阔环境下北斗单系统VDOP数值已经很小,组合定位对其改善效果不明显。但是在多遮挡环境下,组合定位能将VDOP值改善到2以下。
图8为西安地区组合定位和北斗单系统时间精度因子TDOP对比分析结果。同GDOP,PDOP和HDOP一样,组合定位对TDOP也有明显的改善,在多遮挡环境下改善效果更为明显。

图5 西安24 h三维位置精度因子(PDOP)对比曲线
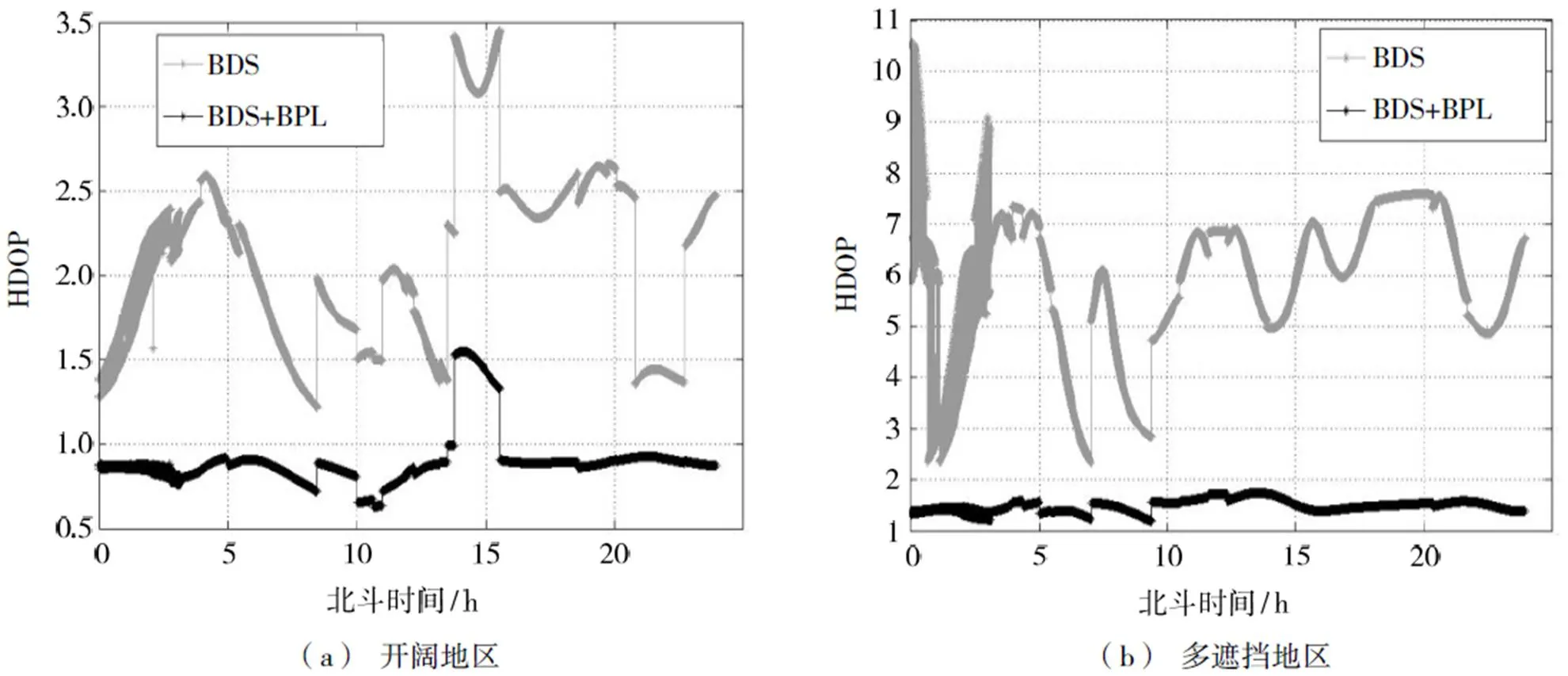
图6 西安24 h 水平位置精度因子(HDOP)对比曲线

图7 西安24 h 高程精度因子(VDOP)对比曲线

图8 西安24 h 钟差几何精度因子(TDOP)对比曲线
从上面的分析可知,不论是在开阔环境还是多遮挡环境,组合定位对GDOP都有明显的改善,在多遮挡环境下改善效果更为突出。该结论也适用与PDOP,HDOP和TDOP。在开阔环境下组合定位对VDOP改善效果并不明显,但是在多遮挡环境下,组合定位能有效改善VDOP。
4 组合定位精度分析
为研究地基长波授时系统与GNSS系统组合定位的精度,本文基于临潼北斗伪码接收机和长波接收机北京时间2015-04-09 12:30~15:30的实测数据进行组合定位坐标解算,组合定位解算采用本文所提出的校正—融合方法,具体算法和公式参见第2节。在分析过程中以不同的卫星高度角来模拟开阔环境和多遮挡环境,以高度角大于5°作为限制条件来模拟开阔环境,以高度角大于35°作为限制条件来模拟多遮挡环境,对比组合定位在两种环境下的定位性能。同时,基于该时间段的数据进行北斗单系统定位解算,对比分析组合定位和北斗单系统导航性能。
4.1 开阔环境下组合定位精度分析
分别以15,30,45和60min的校正时间来对比分析开阔环境下地基长波授时系统与GNSS系统组合定位效果,组合定位定位结果同时与北斗单系统定位结果进行对比,定位误差对比曲线如图9所示。
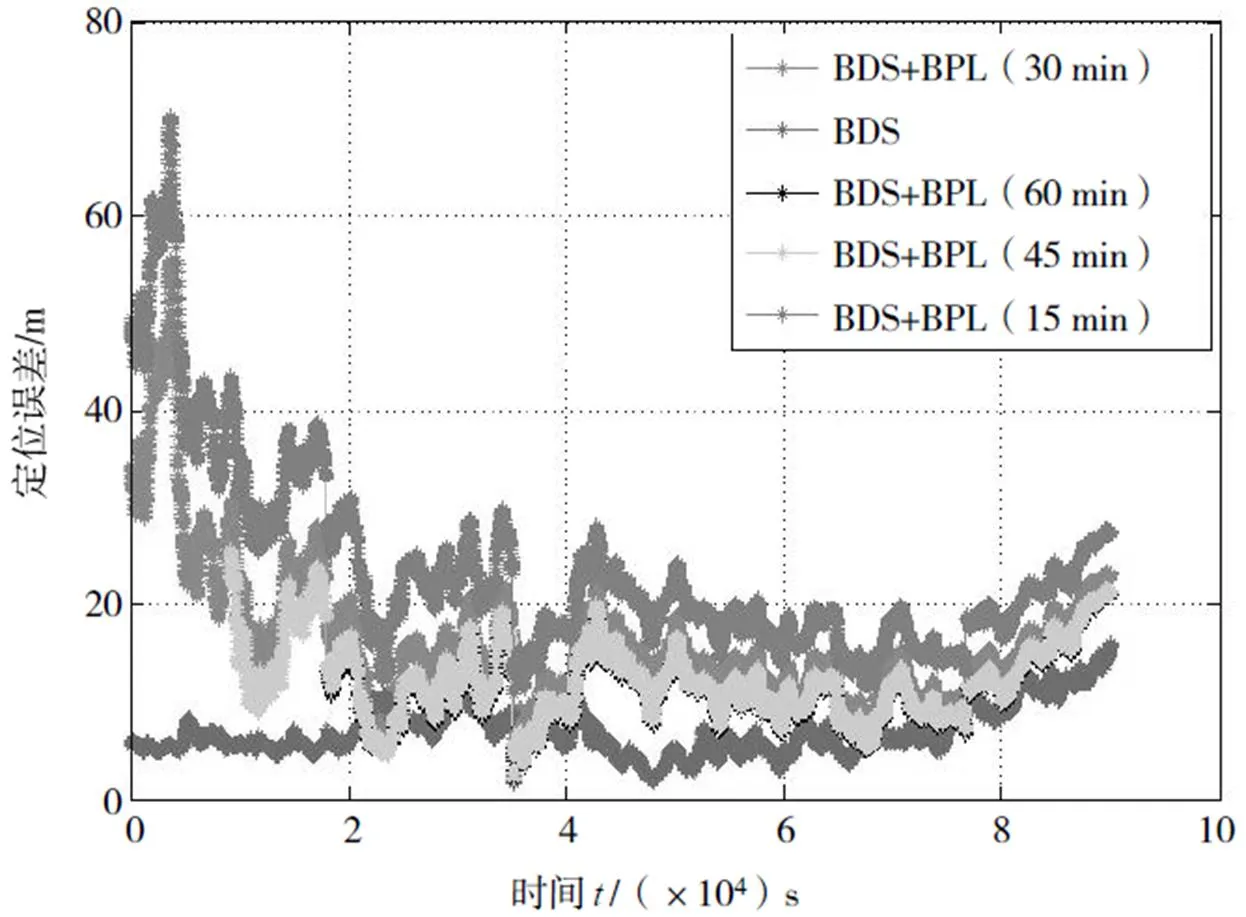
图9 开阔环境下组合定位与北斗单系统定位误差对比曲线
定位误差统计结果和校正误差见表1和表2所示。结合图9和表1与表2统计结果可以看出,在开阔环境下组合定位的定位精度在10 m量级,与北斗单系统定位精度在同一量级上,但是组合定位精度较北斗单系统定位有所恶化,组合定位定位精度与校正精度有关,校正时长越长校正精度越高组合定位精度也越高。

表1 开阔环境下组合定位与北斗单系统定位误差统计结果(一)
续表1
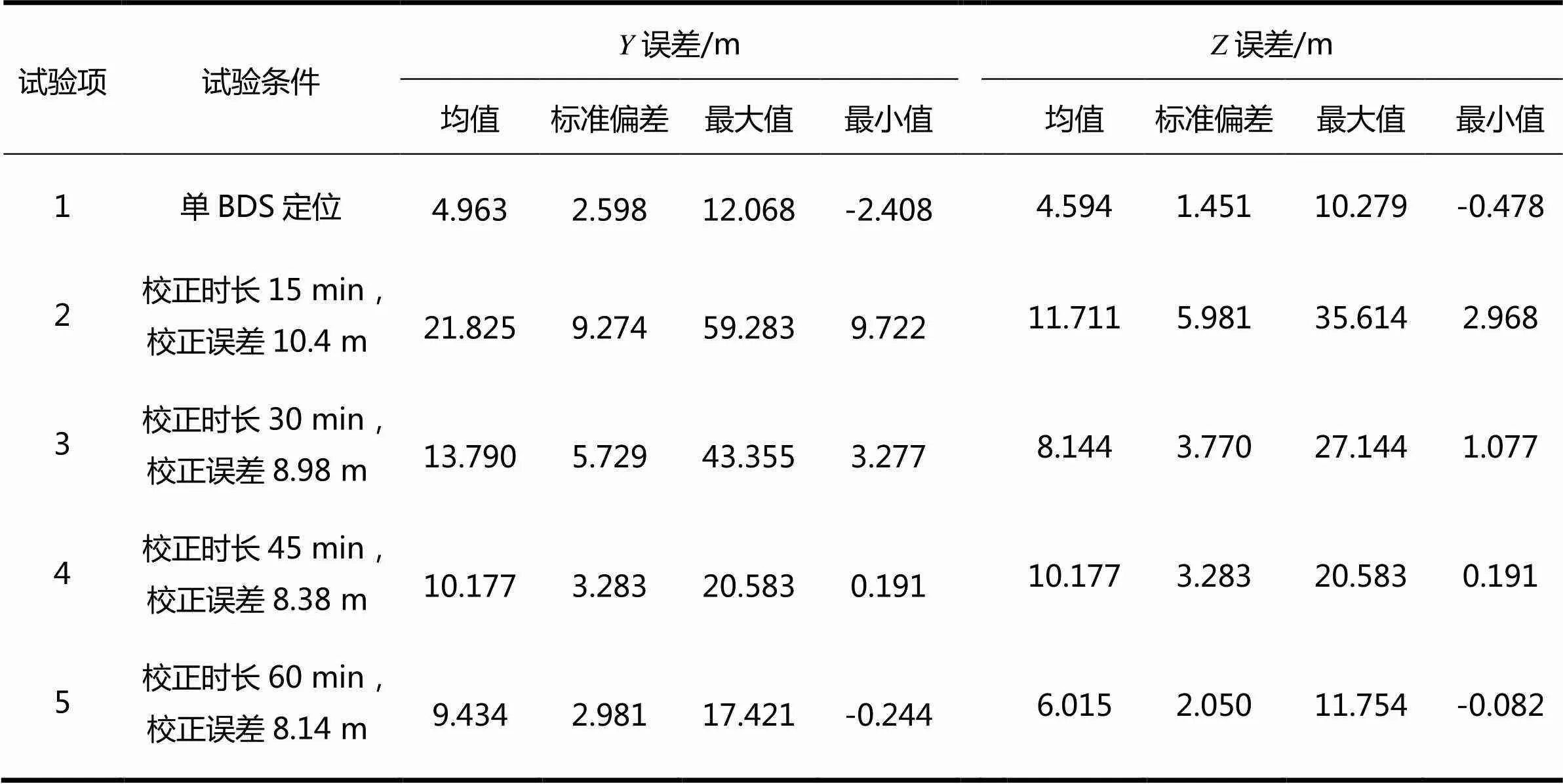
试验项试验条件Y误差/mZ误差/m 均值标准偏差最大值最小值均值标准偏差 最大值 最小值 1单BDS定位4.9632.59812.068-2.4084.594 1.451 10.279 -0.478 2校正时长15 min,校正误差10.4 m21.8259.27459.2839.72211.711 5.981 35.614 2.968 3校正时长30 min,校正误差8.98 m13.7905.72943.3553.2778.1443.770 27.144 1.077 4校正时长45 min,校正误差8.38 m10.1773.28320.5830.19110.177 3.283 20.583 0.191 5校正时长60 min,校正误差8.14 m9.4342.98117.421-0.2446.015 2.050 11.754 -0.082

表2 开阔环境下组合定位与北斗单系统定位误差统计结果(二)
续表2

试验项试验条件纬度误差/m高程误差/m 均值标准偏差最大值最小值均值标准偏差最大值最小值 1单BDS定位0.041 0.032 0.170 -0.041 6.290 2.907 15.780 -1.072 2校正时长15 min,校正误差10.4 m-0.108 0.038 -0.055 -0.259 25.611 12.146 74.740 10.074 3校正时长30 min,校正误差8.98 m-0.041 0.023 0.009 -0.154 16.269 7.481 55.005 2.447 4校正时长45 min,校正误差8.38 m-0.014 0.014 0.033 -0.046 11.992 4.260 25.566 -1.132 5校正时长60 min,校正误差8.14 m-0.010 0.014 0.037 -0.043 11.089 3.869 21.352 -1.637
对比表1和表2可以发现,尽管随着校正精度的提高组合定位在,,各个维度上的定位误差较北斗单系统定位并没有改善,但是在经度和纬度定位精度方面与北斗单系统定位相比是有一定改善的,表2中组合定位经度、纬度定位误差的均值的绝对值都小于北斗单系统定位,在纬度误差的标准偏差方面组合定位也低于北斗单系统导航,在经度误差的标准偏差方面组合定位随着校正精度的提高也逐渐逼近于北斗单系统导航。因此可以说明,满足一定的校正精度时在开阔环境下地基长波授时系统和北斗双系统组合定位能改善水平定位精度。结合第4节在开阔环境下组合定位能有效改善HDOP,但是对VDOP改善效果并不明显的结论,与本节开阔环境下组合定位实测数据分析结论一致。
从表1和表2还可以看出,校正精度越高组合定位的各项定位误差的绝对值越小、标准偏差也越小、各项定位误差的分布区间也越窄,各项定位误差包括距离误差、误差、误差、误差、纬度误差和高度误差,但不包括经度误差,表2中经度误差的绝对值随着校正精度的升高反而增大。
4.2 遮挡环境下组合定位精度分析
同样以15,30,45和60 min的校正时间来对比分析遮挡环境下组合定位精度,组合定位的定位结果同时与北斗单系统定位结果进行对比,定位误差对比曲线如图10所示,定位误差统计结果和校正误差见表3和表4所示。结合图10和表3与表4统计结果可以看出,在遮挡环境下组合定位的定位精度也在10m量级,与北斗单系统定位精度在同一量级上,但是组合定位精度较北斗单系统定位有所恶化,这与开阔环境下得出的结论一致。
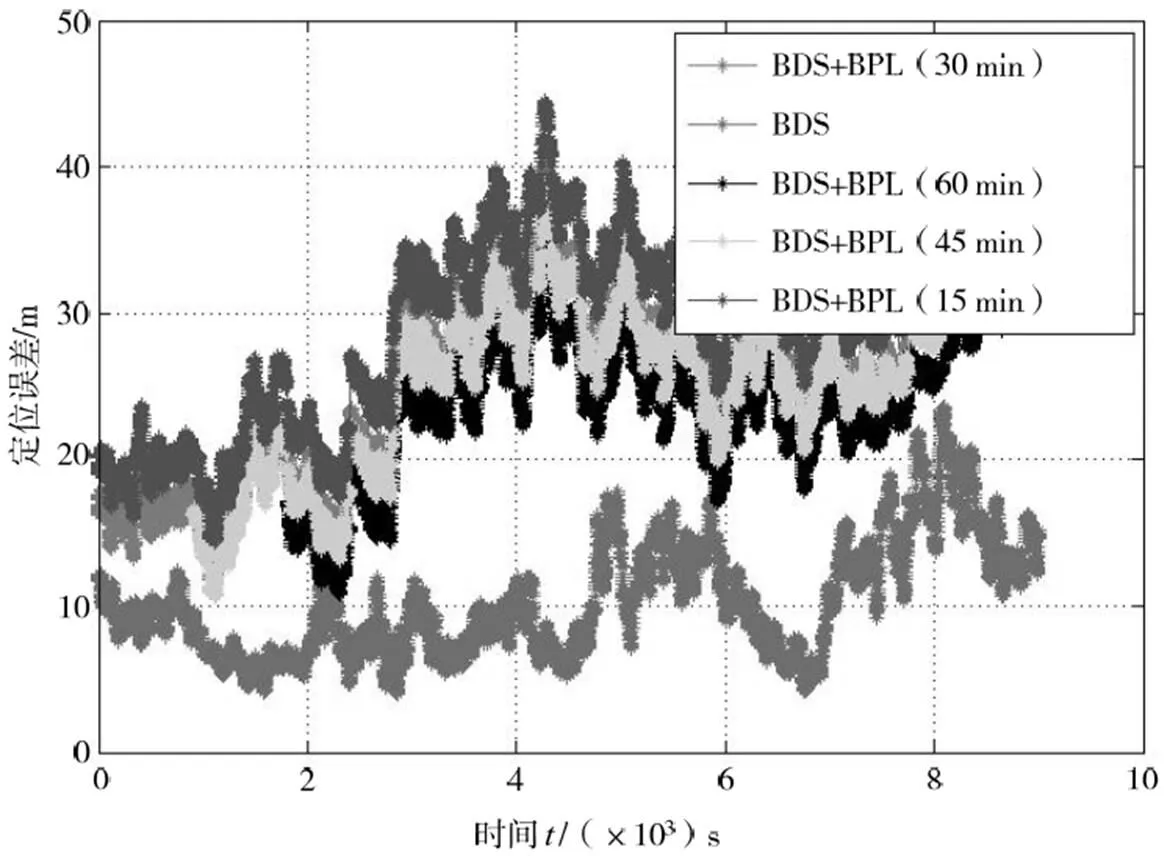
图10 遮挡环境下组合定位与北斗单系统定位误差对比曲线
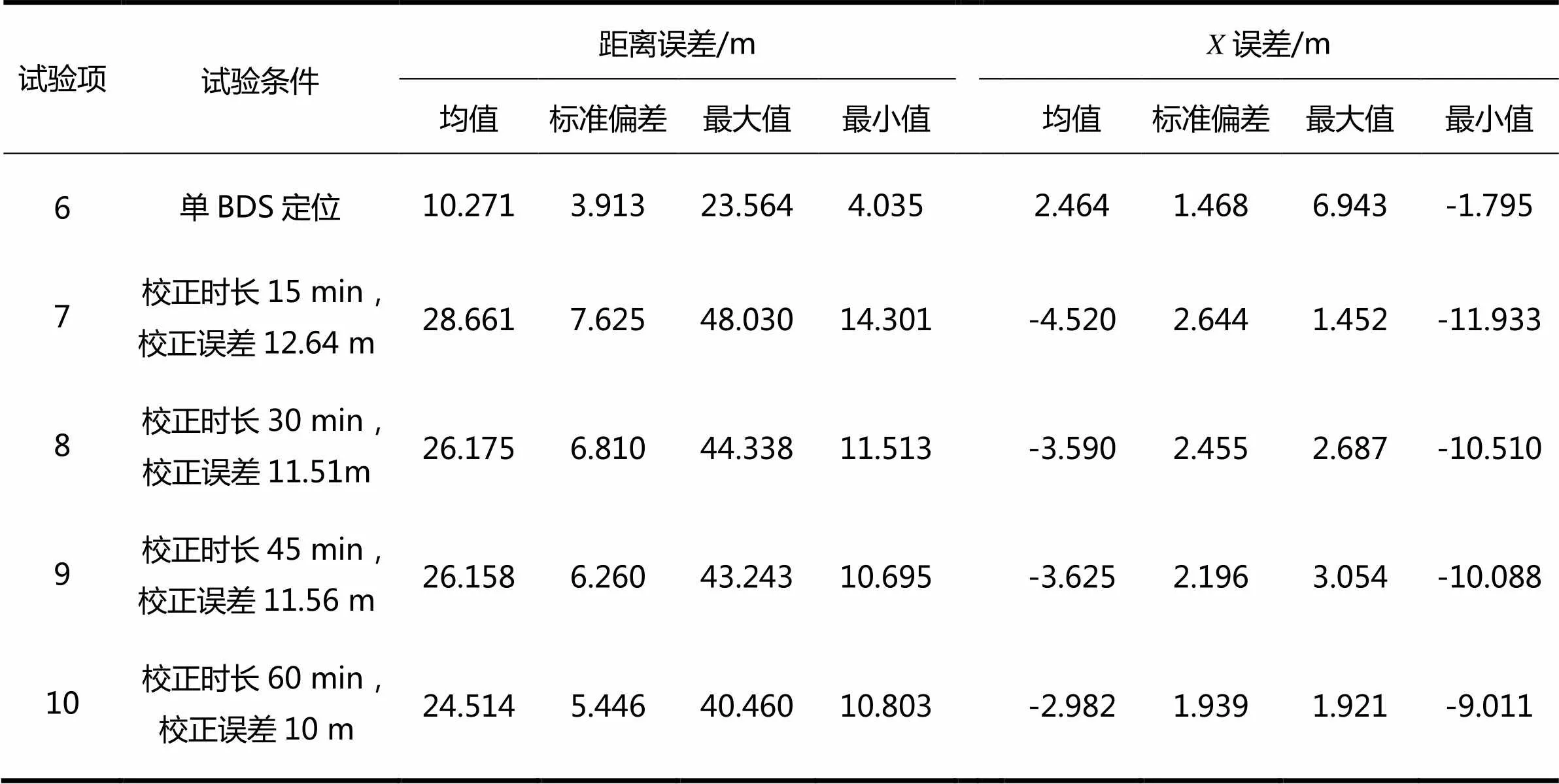
表3 遮挡环境下组合定位与北斗单系统定位误差统计结果(一)
续表三
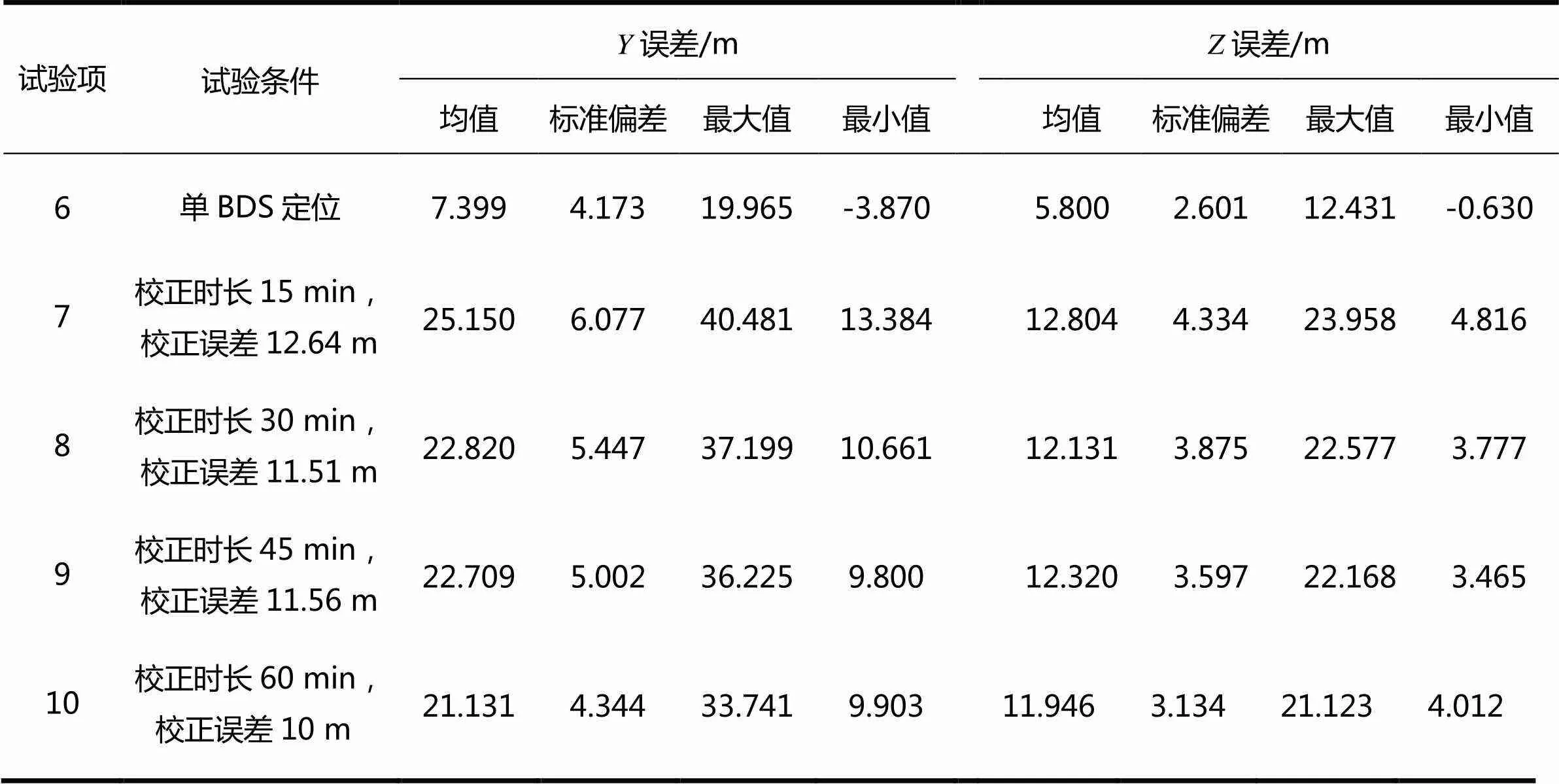
试验项试验条件Y误差/mZ误差/m 均值标准偏差最大值最小值均值标准偏差最大值最小值 6单BDS定位7.399 4.173 19.965 -3.870 5.800 2.601 12.431 -0.630 7校正时长15 min,校正误差12.64 m25.150 6.077 40.481 13.384 12.804 4.334 23.958 4.816 8校正时长30 min,校正误差11.51 m22.820 5.447 37.199 10.661 12.131 3.875 22.577 3.777 9校正时长45 min,校正误差11.56 m22.709 5.002 36.225 9.800 12.320 3.597 22.168 3.465 10校正时长60 min,校正误差10 m21.1314.344 33.741 9.903 11.946 3.134 21.123 4.012
对比表3和表4可以发现,遮挡环境下组合定位在,,各个维度上的定位误差较北斗单系统定位并没有改善,但是在经度定位精度方面与北斗单系统定位相比是有一定改善的,遮挡环境下的纬度和高度定位误差也没有改善。从表3和表4还可以看出,遮挡环境下校正精度越高组合定位的各项定位误差的绝对值越小、标准偏差也越小、各项定位误差的分布区间也越窄,各项定位误差包括距离误差、误差、误差、误差、纬度误差和高度误差,不包括经度误差,表4中经度误差的绝对值并没有随着校正精度的升高而减少。这一结论与开阔环境下得到的结论基本一致。
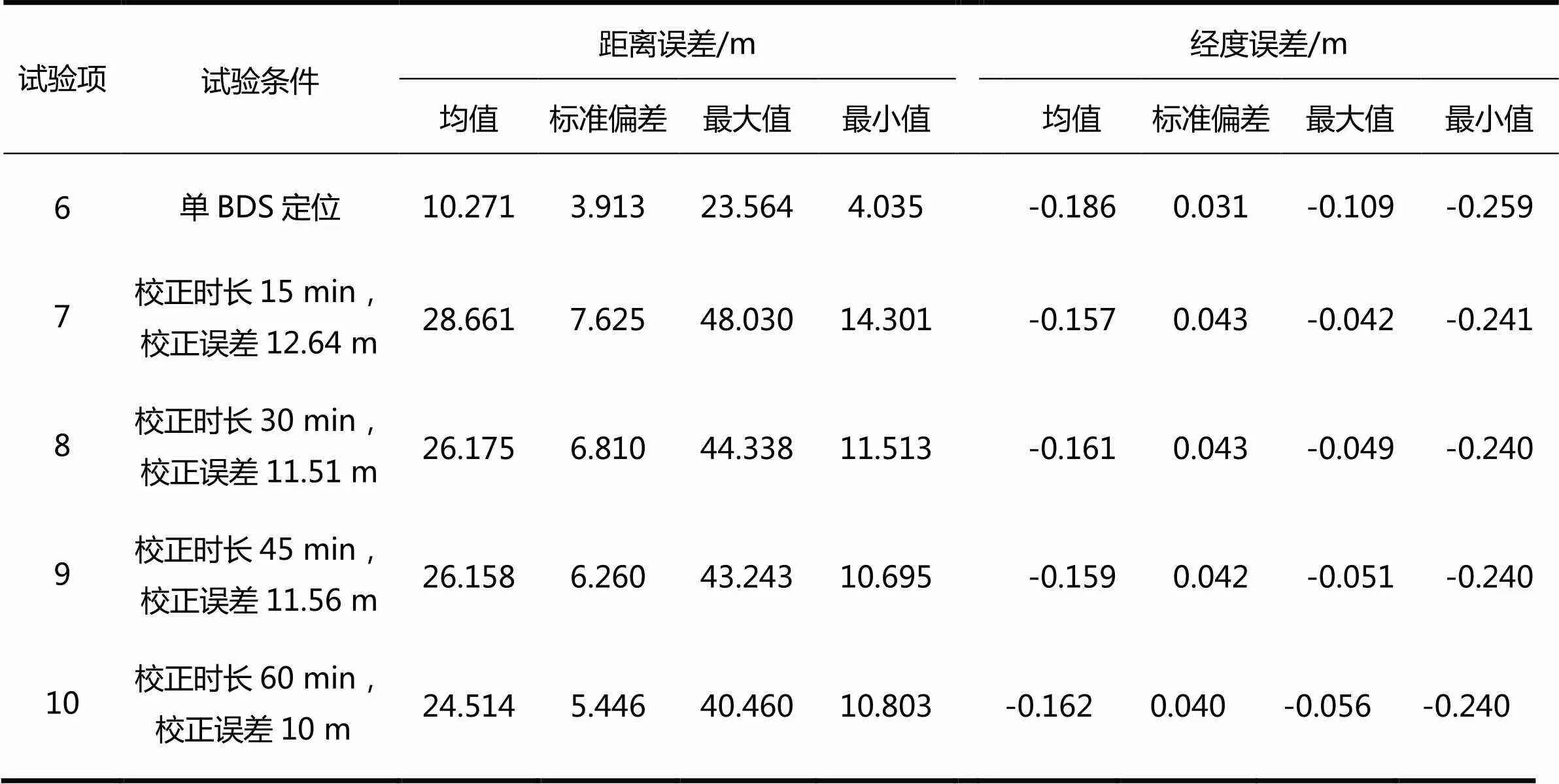
表4 遮挡环境下组合定位与北斗单系统定位误差统计结果(二)
续表4
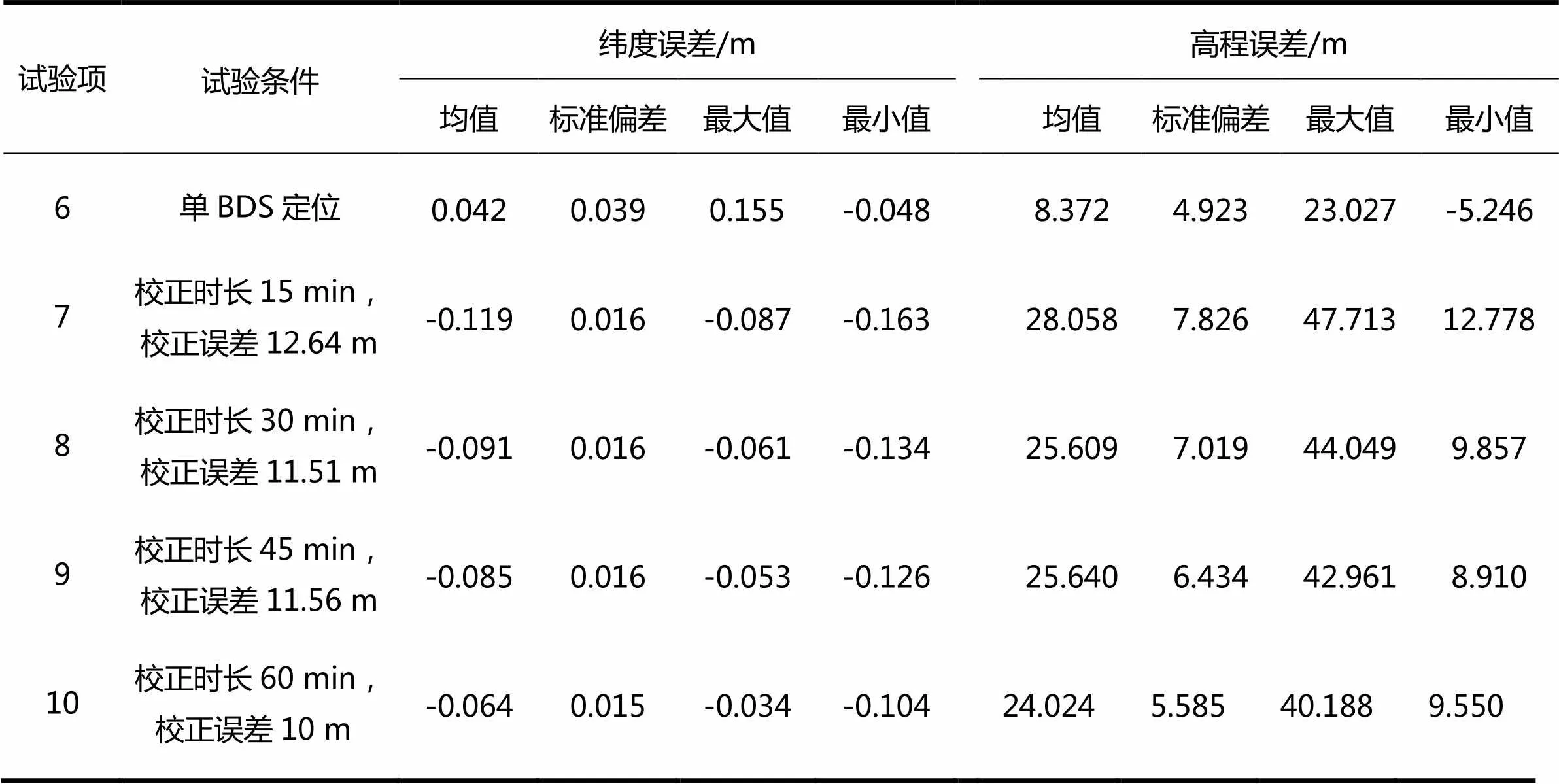
试验项试验条件纬度误差/m高程误差/m 均值标准偏差最大值最小值均值标准偏差最大值最小值 6单BDS定位0.042 0.039 0.155 -0.048 8.372 4.923 23.027 -5.246 7校正时长15 min,校正误差12.64 m-0.119 0.016 -0.087 -0.163 28.058 7.826 47.713 12.778 8校正时长30 min,校正误差11.51 m-0.091 0.016 -0.061 -0.134 25.609 7.019 44.049 9.857 9校正时长45 min,校正误差11.56 m-0.085 0.016 -0.053 -0.126 25.640 6.434 42.961 8.910 10校正时长60 min,校正误差10 m-0.064 0.015 -0.034 -0.104 24.024 5.585 40.188 9.550
对比图4,图9和图10可以发现,不论是在开阔环境还是遮挡环境下,组合定位能够有效改善几何精度因子,但是受限于长波授时系统的技术精度,组合定位的整体精度较北斗单系统导航会有所降低,在开阔环境下组合定位水平方向的绝对定位精度优于北斗单系统,在遮挡环境下组合定位经度维度的定位绝对精度也优于北斗单系统。如果后续对长波数据增加平滑滤波的预处理过程,组合定位精度还有进一步提升的空间。
5 结语
本文首先从理论上分析了地基长波授时系统和GNSS系统组合定位的可行性,并提出了校正—融合的组合定位算法用以修正长波数据系统误差,进一步提升组合定位性能。然后,以西安为例分析了长波授时系统和北斗系统组合定位对几何精度因子的改善情况。最后,基于实测数据研究了长波授时系统和北斗系统组合定位精度,并与北斗单系统定位进行对比。基于实际研究结果,可以得到以下结论:
①以蒲城长波发射台和北斗导航卫星进行组合定位,无论是在开阔环境下还是遮挡环境下,采用本文提出的校正—融合算法可以达到数十米量级的定位精度。但是相比北斗单系统,定位精度有一定的恶化,如果引入对长波数据的平滑滤波等预处理方法,组合定位可进一步提升其精度;
②不论是在开阔环境还是多遮挡环境,组合定位对GDOP,PDOP,HDOP和TDOP都有明显的改善,在多遮挡环境下改善效果更为突出。在开阔环境下,组合定位对VDOP改善效果并不明显,但是在遮挡环境下,组合定位能有效改善VDOP;
③采用本文提出的校正—融合的方法进行组合定位,校正精度随校正时间的延长而有所提高,校正精度越高组合定位的整体性能也会随之提升。该方法也适用于其他Loran系统与GNSS系统的组合定位。
因此,在GNSS卫星遮挡和干扰严重时,利用本文所提出的校正—融合的方法进行组合定位,既可以改善DOP值,也可以提高系统的可用性,定位精度和GNSS单系统在同一数量级。
[1] 张戎, 路明, 龚涛, 等. 复杂电磁环境下罗兰C系统作为GPS备份的探讨[J]. 全球定位系统, 2010, 4: 43-46.
[2] 黄辉, 吉春生. RDSS/LORAN-C组合导航的实现方法研究[J]. 宇航计测技术, 2005, 25(1): 18-21.
[3] 李实锋. 罗兰-C数字化定时接收机关键技术研究[D]. 西安: 中国科学院国家授时中心, 2009.
[4] 曹正文, 罗锐, 彭进业. 北斗/罗兰C组合导航系统定位算法的研究[J]. 西北大学学报: 自然科学版, 2005, 35(5): 559-561.
[5] 刘志国, 廖守亿, 王仕成, 等. 一种新的北斗/罗兰C组合导航滤波算法[J]. 系统仿真学报, 2009, 21(7): 1834-1837.
[6] 马立新, 陈永兵. 罗兰C和北斗组合导航系统导航精度研究[J]. 海洋测绘, 2009, 29(1): 76-78.
[7] 曹可劲, 朱银兵, 张磊, 等. 罗兰C双台链交叉导航算法研究[J]. 海军工程大学学报, 2011, 23(3): 1-4.
[8] 杨光, 欧阳光洲, 郝巍娜, 等. CAPS/罗兰C组合导航系统的DOP值研究[C]//2013年中国卫星导航学术年会电子文集, 武汉: 第四届中国卫星导航学术年会组委会, 2013: 170-174.
[9] 佟海鹏, 徐海刚, 刘兆平. 复杂环境下罗兰C/北斗组合导航系统GDOP仿真分析[J]. 舰船科学技术, 2012, 34(5): 108-11
Research on the integrated positioning techniques of ground-based LF time service system and GNSS
LIU Yin-hua1,2,3, LI Xiao-hui1,2,4, LIU Chang-hong1, LI Shi-feng1
(1. National Time Service Center, Chinese Academy of Sciences, Xi’an 710600, China;2. Key Laboratory of Precise Positioning and Timing Technology, National Time Service Center,Chinese Academy of Sciences, Xi’an 710600, China;3. University of Chinese Academy of Sciences, Beijing 100049, China;4. School of Astronomy and Space Science, University of Chinese Academy of Sciences, Beijing 100049, China)
GNSS can be easily interfered and blocked-off because of its technique characteristics, thus, it is of limitation and will bring risk if use only GNSS system in national military applications. The long wave time service system such as BPL is a kind of terrestrial radio transmitting system, which adopts Loran-C (Long Range Navigation System) signal format and has the advantages of great transmitting signal power and strong ability of anti-electromagnetic interference. So far, the synchronization of LF time and UTC time has been completed based on common view link, so the LF time transmitting station can be considered as a pseudo-satellite of GNSS. Thus, LF time service system and GNSS can be integrated to improve the usability of navigation systems and reduce the risk of military application. Firstly, the accuracy of long wave timing is studied and compared with that of BDS, and the feasibility of integrated navigation is analyzed based on the performance. Then, the theory and method of integrated positioning is introduced, meanwhile the integrated positioning algorithm based on calibration-fusion is presented to correct the systematic error of long wave data and achieve further improvement of the performance of integrated positioning. Furthermore, Xi’an is taken as an example to analyze the effect of integrated positioning on geometric dilution of precision (GDOP). Finally, the performance of integrated positioning is researched based on the data collected from the receivers of two systems, and the result of integrated positioning is compared with that of single BDS. The research results show that integrated positioning of LF time service system and BDS can improve GDOP greatly, and the effect is more obvious in blocked-off area; the positioning accuracy of tens of meters can be achieved based on pseudo-code receiver if the integrated positioning algorithm is used, which is slightly worse than single BDS positioning.
GNSS; LF time service; integrated positioning; DOP; positioning accuracy
P127.1
A
1674-0637(2017)03-0161-17
10.13875/j.issn.1674-0637.2017-03-0161-17
2017-01-17
中国科学院“西部之光”人才培养计划西部青年学者A类资助项目(XAB2016A05)
刘音华,女,博士研究生,副研究员,主要从事卫星导航、时频测量方面的研究工作。
猜你喜欢
军事文摘(2023年4期)2023-04-05
小哥白尼(神奇星球)(2022年3期)2022-06-06
数学物理学报(2021年3期)2021-07-19
当代陕西(2019年18期)2019-10-17
智富时代(2019年4期)2019-06-01
智富时代(2019年4期)2019-06-01
测控技术(2018年4期)2018-11-25
城市轨道交通研究(2017年6期)2017-07-05
太空探索(2016年12期)2016-07-18
太空探索(2016年3期)2016-07-12