
基于粒子群优化算法对PID参数的优化整定
2017-12-07 02:03董楠楠王长海
软件 2017年11期
董楠楠,夏 天,王长海
(辽宁大学信息学院,辽宁 沈阳 110035)
基于粒子群优化算法对PID参数的优化整定
董楠楠,夏 天,王长海
(辽宁大学信息学院,辽宁 沈阳 110035)
本文首先介绍了PID控制器,在此基础上提出了一种基于智能群算法对PID控制器的比例、积分、微分三个参数进行优化整定的改进PSO算法,并利用Mat lab对 PID工业控制器进行模拟仿真,利用仿真曲线进行直观的对比。通过与标准PSO优化算法及常规的Z-N整定法的比较,结果表明基于改进PSO算法对PID的整定方法不仅能快速的从全局搜索出优化的整定参数,而且也能够大大地提升整定效果。实验结果也表明该算法具体良好的收敛速度和稳定性,是一种具有高控制精度、高稳定性和快速性的PID整定算法。
群智能算法;改进PSO算法;惯性权重;学习因子;PID控制器;参数整定
0 引言
粒子群算法(Particle Swarm Optimization,PSO)是近年来由J. Kennedy和R. C. Eberhard等开发的一种新的进化算法[3](Evolutionary Algorithm,EA),它和遗传算法类似。本文针对粒子群算法的不足,提出一种改进的粒子群算法。大量实验证明了这种改进如果运用到PID的参数整定中,为工业设备自愈技术的发展奠定了基础。
1 问题描述
在工业生产过程中,使用比较多的调节器控制规律应该为比例、积分、微分控制,也可以称为PID调节[4]。这种 PID调节是最初使用的控制策略中的一个。也是目前世界范围内应用最广泛的工业控制之一。使用PSO优化算法对PID控制参数进行优化整定,就是在比例、微分和积分(kp、ki、kd)三个系数的可行解空间中寻找某一组控制参数使得性能评价指标最优。使用PSO优化算法使得系统偏离目标参数误差最小,得到的性能指标最优。
2 基于改进粒子群算法对PID参数整定的研究
2.1 PSO 算法概述
PSO算法是一种模拟鸟群行为的最优化算法[5],首先在解空间内初始化一组称之为“粒子”的随机解,然后由若干的粒子组成粒子群,每一个处于粒子群内的粒子都代表着一个可能的最优解。在PSO算法中,每一个粒子都会在搜索空间中“飞行”,所有的粒子都有一个由被优化的函数决定的适应值(fitness),每个粒子还有一个速度决定他们飞行的方向和距离,与此同时,每个粒子都要记录自身到达过的最优解(pBest)和种群所到达的最优解(gBest),通过“跟踪”这两个极值来调整自身所在的位置和“飞行”的速度,从而得到最优解。
该算法作为一种群智能算法,具有易于实现、搜索效率高、搜索速度快等优点。却也存在在算法的后期容易陷入局部最优、收敛速度变慢和对离散解空间处理效果比较差等缺点。对于这些缺点,本文提出了一种对惯性参数和学习因子进行改进的方法。
在找到这两个最优解时,粒子根据如下的公式来更新自己的速度和位置:
运用法治方式、实行多元主体共同治理,是我国近年来探索国家治理现代化的经验总结和实践创新,在构建现代乡村治理体系过程中也要逐步探索这一治理手段。《中共中央国务院关于实施乡村振兴战略的意见》提出,要“建立健全党委领导、政府负责、社会协同、公众参与、法治保障的现代乡村社会治理体制,坚持自治、法治、德治相结合,确保乡村社会充满活力、和谐有序”[3]19。根据意见要求,在具体的乡村治理中,应着力做好三个方面。

其中,t代表当前迭代次数;ω则代表惯性权重,对于不同的优化问题,惯性权重ω的设计对于调节局部搜素能力和全局搜索能力的调节起着至关重要的作用。惯性权重ω取值较大时适合全局搜索;惯性权重ω较小时则搜索精度较高,更适合局部搜索。c1和c1分别对应着个体学习因子和种群学习因子,学习因子c1和c2反映的是粒子自身的飞行经验与种群内部飞行经验对整个种群飞行线路的影响,表现出种群粒子之间信息的互换和共享。r1和 r2则是两个在取值于[0,1]之间的随机定值参数。ppBest代表粒子当前到达的最优解,pgBest代表种群当前到达的最优解。
2.2 惯性权重参数的改进
文献[6]提出动态控制惯性权重的方法,将当前的适应值与上一次通过迭代得出的适应值想比较,其公式如下所示:
文献[7]则提到一种非线性的惯性权重递减策略,具体的实现方法是将惯性权重的更新函数改为如下两个函数中的一个:
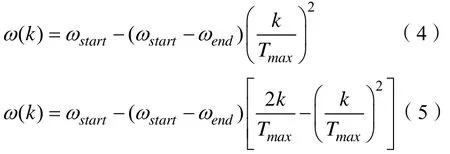
上述两个函数,第一个为凸函数,第二个为凹函数。仿真实验表明,前者容易出现早熟[8],后者则出现早熟现象的可能性较小。当更新函数属于凹函数时,本文提出了一种基于动态非线性更新惯性权重方法:

在上述方法中,惯性权重服从指数分布,在迭代的初期惯性权重ω能够取一个较大的值,而后期惯性权重取相对较小的值,这样做的好处有两个。第一,可以加快收敛速度,使算法在前期快速在全局范围内搜索,末期收敛速度仍较快,同时能保持良好的精度。第二、动态更新策略能防止其早熟现象的出现,有效地提高算法的正确性。
2.3 学习因子的改进
在标准的 PSO优化算法中通常取 c1=c2=2。本文中对比了采取了两种学习因子更新方式[9],并根据这两种方式通过实验评测其优化效果,提出自己的学习因子更新方式:
方式一:保持学习因子c1和c2相加和为4,即满足公式:

我们让c1从1每次以0.25步长递增至3,让c2从3每次以0.25步长递减至1,共产生9组数据。
方式二:保持两个学习因子满足公式:

对于方案一而言,c1落在区间[2.25,3],c2落在区间[1,1.75]时,算法的平均适应度最高。对于方案二来说,c1和 c2同时落在区间[1,1.6]时,算法的平均适应度最高,算法的整体寻优效果较佳。为便于研究观察,将两种实验图进行对比如图1所示。我们不难得出结论,对于方案一而言,c1落在区间2.25,3,c2落在区间1,1.75时,算法的平均适应度最高,算法的整体寻优效果较佳。

图1 寻优对比Fig.1 Optimal contrast
因此,基于以上实验结果,本文提出一种基于随机漫步(Random walk)的方法来确定学习因子的具体数值。随机漫步是一种数学统计模型,它由一连串轨迹所组成[10]。其中每一次的行走都是随机的,它能用来表示不规则的变动形式让c1每一次都在区间[2.25,3]随机取值,c2每一次都在区间[1,1.75]随机取值,满足下列公式:

(其中参数r在区间[0,1]随机漫步)
3 仿真实验分析
3.1 仿真实验过程
通过运用 Mat lab实验改进粒子群算法对 PID控制器的整定,同时在Simulink中构建无刷直流电机模型,研究优化效果[11]。粒子群算法的流程如下描述:
(1)初始化粒子群算法所需的参数。
(2)初始化粒子群。
(3)计算每个粒子的适应度。
(4)判断是否是否全局最优位置已经满足最小界限,如果满足,则结束算法;否则,继续执行步骤3。
3.2 仿真及对比
实验时,采用标准 PSO算法与本文改进 PSO算法进行对比[12]。实验中设置6.0=ω,1c=22c=,采取ITAE评价标准,得到适应值,如图2所示。

图2 采用标准PSO算法与本文改进PSO算法的性能指标ITAE变化曲线Fig.2 IT AE changing curve between adoption of standard PSO algorithm and Improved PSO algorithm
本文惯性系数采用公式 6,学习因子采用公式9,并且改进的粒子群算法采用ITAE性能指标,得到的适应值变化曲线如图3所示。

图3 改进的粒子群算法ITAE性能指标Fig.3 ITAE from improved particle swarm optimization
为了进一步对比标准 PSO和改进的 PSO算法的优劣,我们还将两种算法的最优参数对应的单位阶跃响应曲线,其适应值随时间变化的结果的对比如图4所示。
再使用经典的Z-N公式对相同的情况进行整定以做对比,整定结果如图5所示。对比图4和图5可以看出,改进的PSO算法和传统的Z-N整定相比无论是在收敛速度还是在收敛的稳定性方面都有很大的优化。

图4 标准PSO与改进PSO的单位阶跃响应曲线对比Fig.4 The comparison of step response curves between adoption of standard PSO algorithm and Improved PSO algorithm

图5 Z-N算法优化后的单位阶跃响应曲线Fig.5 the step response curves method after Algorithm optimization
综合以上的实验结果我们得出结论:改进的PSO算法与标准PSO算法相比算法的收敛速度有明显的提高,稳定性也大大增强。
4 总结
本文提出了一种基于智能群算法对PID控制器的参数进行优化整定的改进PSO算法。通过对比改进PSO算法与标准PSO优化算法及普通的Z-N整定法的整定效果,证明了该算法具体良好的收敛速度和稳定性,是一种具有高控制精度、高稳定性和快速性的PID整定算法。
[1] scar, Luis-Angel, Daniel, et al. Analysis of fault signatures for the diagnosis of induction motors fed by voltage source inverters using ANOVA and additive models[J]. Electric Power Systems Research, 2015, 121: 1-13.
[2] Zuqiang Su, Baoping Tang, et al. Multi-fault diagnosis for rotating machinery based on orthogonal supervised linear local tangent space alignment and least square support vector machine[J]. Neurocomputing, 2015, 157: 208-222.
[3] ALFIAlireza. PSO with Adaptive Mutation and Inertia-Weight and Its Application in ParameterEstimation of Dynamic Systems. ActaAutomaticaSinica, 2011, 37(5): 541-549.
[4] Bansal J C, Singh P K, Saraswat M, et al. Inertia Weight strategies in Particle Swarm Optimization[C]// Nature and Biologically Inspired Computing. IEEE, 2011: 633-640.
[5] P. J. García Nieto, E. García-Gonzalo, et al. Hybrid PSO–SVM-based method for forecasting of the remaining useful life for aircraft engines and evaluation of its reliability[J].Reliability Engineering and System Safety, 2015, 138:219-231.
[6] 洪蕾. 粒子群及人工鱼群算法优化研究[J]. 软件, 2014,35(8): 83-86.
[7] Neil Pickthall. The contribution of maintenance human factors to no fault founds on aircraft systems engineering[J].Procedia CIRP, 2014, 22: 59-64.
[8] Idriss El-Thalji, Erkki Jantunen. Comparison of dimensionality reduction techniques for the fault diagnosis of mo no block centrifugal pump using vibration signals[J]. Engineering Science and Technology, an International Journal,2014, 17: 30-38.
[9] 王水花, 张煜东, 吉根林等. 群智能算法的理论及应用综述[J]. 南京师范大学学报(工程技术版), 2014, 14(4):31-38.
[10] 徐甜丽. 基于粒子群算法的轨道电路补偿电容故障诊断方法[J]. 软件, 2014, 35(1): 49‒52.
[11] 连晓峰, 王炜伊等. 基于自适应步长人工鱼群算法的仿生机器鱼目标检测研究[J]. 计算机测量与控制, 2014, 22(12):3864-3866.
[12] Rabindra Kumar Sahu, Sidhartha Panda, et al. A novel hybrid PSO-PS optimized fuzzy PI controller for AGC in multi area interconnected power systems[J]. Electrical Power and Energy Systems, 2015, 64: 880-893.
An Improved Particle Swarm Optimization Approach for Optimum Tuning of PID Controller
DONG Nan-nan, XIA Tian, WANG Chang-hai
(College of information,Liaoning University,Shenyang 110035, China)
We have firstly introduced the PID controller, and proposed an improved particle swarm optimization approach based on swarm intelligent algorithm for the three parameters of PID optimum tuning, and we have used the Matlab for visual comparison with the simulation curve to compare our algorithm with the standard PSO algorithm and conventional Z-N tuning method. The result shows that the improved PSO algorithm can not only rapidly find the global search optimization, but also can greatly enhance the optimum effect and it is an algorithm with good convergence speed and stability, it is also a good PID tuning algorithm with high control precision, high stability and rapidity.
Swarm intelligence algorithm; Improved PSO algorithm; Inertia weigh; Learning factor; PID controller; Optimum design
TM306;TP18
A
10.3969/j.issn.1003-6970.2017.11.013
本文著录格式:董楠楠,夏天,王长海. 基于粒子群优化算法对PID参数的优化整定[J]. 软件,2017,38(11):67-70
辽宁省教育厅科学研究项目资助(NO. LYB201617);国家自然科学基金项目资助(61472169);辽宁省教育厅科学研究一般项目资助(NO. L2015204)
董楠楠,(1981-),女,山东,汉族,硕士研究生,研究方向:数据库和模式识别等;夏天,(1988-),男,硕士研究生,研究方向:数据库和模式识别等;王长海(1995-),本科,研究方向:计算机科学与技术。
猜你喜欢
当代陕西(2020年17期)2020-10-28
测控技术(2018年10期)2018-11-25
人大建设(2018年5期)2018-08-16
浙江工业大学学报(2017年5期)2018-01-22
电信科学(2017年6期)2017-07-01
小学科学(学生版)(2016年1期)2016-10-09
河南科技(2014年15期)2014-02-27
物理与工程(2014年4期)2014-02-27
山西大同大学学报(自然科学版)(2014年3期)2014-01-23
