
蔬菜穴盘钵苗取苗机构设计——基于PLC控制和虚拟样机技术
2017-12-15 06:47姜岩蕾韩艳赞
农机化研究 2017年1期
姜岩蕾,韩艳赞
(河南工业职业技术学院,河南 南阳 473000)
蔬菜穴盘钵苗取苗机构设计
——基于PLC控制和虚拟样机技术
姜岩蕾,韩艳赞
(河南工业职业技术学院,河南 南阳 473000)
蔬菜穴盘钵苗是目前最常用的育苗方式之一,其工作方式为人工取苗后,再由机械进行栽苗操作的半自动化移栽,但这种方式的种植效率受到人工取苗效率的限制,达不到高效移栽的目的。为此,设计了一种新的自动取苗装置,并提出了5个椭圆齿轮组成行星取苗机构,利用PLC控制系统,可以实现取苗的连续自动化操作,并配备了远程控制和闭环调节环节,大大提高了穴盘育苗的机械效率和作业精度。利用虚拟样机仿真测试的方法对取苗机构进行了优化设计,使用UG软件建立了取苗机构的模型,将模型导入到ADMAS软件中进行了动力学仿真,将虚拟仿真得到的取苗片尖点运动轨迹结果和实验测试结果进行了对比,验证了其一致性。
穴盘育苗;虚拟样机;PLC控制;闭环调节;ADMAS仿真
0 引言
目前,半自动蔬菜钵苗移栽机是穴盘育苗移栽过程中使用的主要机械,该机械利用人工取苗和放苗,降低了工作效率。随着移栽机构转速的增加,露苗速度也会加快,因此需要研究一种集自动送苗、取苗、植苗等多种功能于一体的全自动蔬菜钵苗移栽机,以提高穴盘育苗提高工作效率。取苗机主要结构为自动化取苗机构,但目前国内外研究的自动取苗装置结构复杂,不易大规模生产和制造,只有设计出合理简单的取苗结构,才能降低设计和制造成本,加快全自动移栽机械的发展速度。
1 蔬菜穴盘钵苗取苗机构和PLC控制
目前,育苗最广泛使用的3种方式为穴盘育苗、苗床育苗及营养育苗,穴盘育苗是将营养土壤放置于穴孔中,将种子种在穴盘中,待秧苗长成后将秧苗取出,进行种植,这种育苗方式利于机械移栽。钵苗盘的结构如图1所示。
当秧苗长成之后,实现秧苗的顺利移栽是实现穴盘育苗种植的关键。移栽后的蔬菜可以更加充分的利用自然资源,缩短了幼苗的发育时间,降低了生产周期,从而增加了产量。目前我国对于蔬菜移栽机械的研究还比较落后,移栽主要靠人工完成,为了提高移栽效率,需要设计出自动化水平较高的移栽机械。
图2为近年来研制的半自动穴盘育苗移栽机。该移栽机的工作方式为人工取苗后,再由机械进行载苗操作,其种植的效率受到了人工取苗的限制。基于此,本研究设计了一种新的自动取苗装置,如图3所示。

图1 钵苗盘结构示意图

图2 半自动穴盘育苗自动移栽机
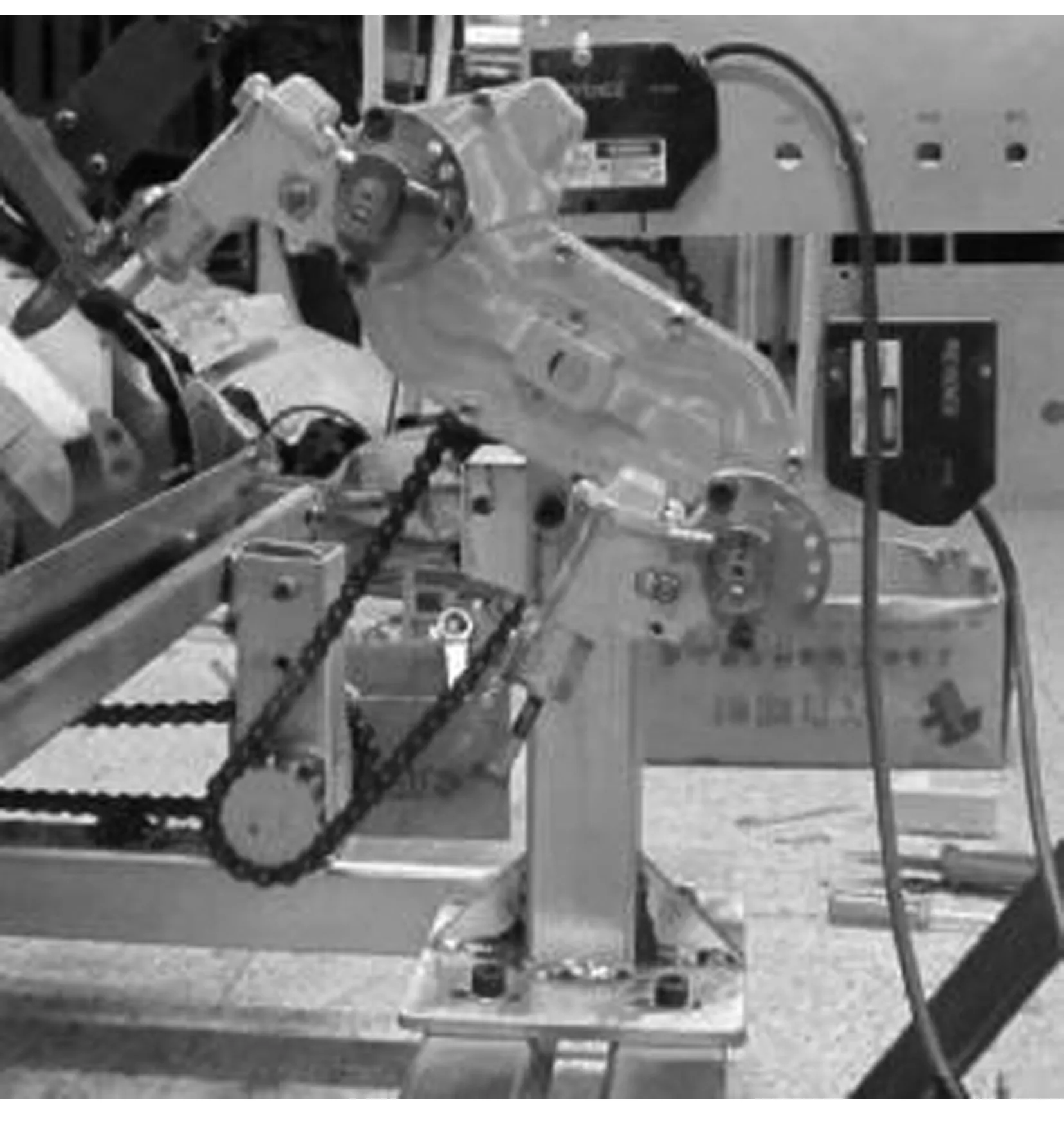
图3 自动取苗机械手
图3中,机械手基于PLC控制系统,可以实现取苗的连续自动化操作,并且利用PLC控制系统设计了远程控制和闭环调节系统,从而提高了机械取苗的精度和效率。
图4为本研究设计的穴盘苗自动移栽的流程图。其工作的流程主要分为4部分,包括定位、机械手抓取穴盘苗、重新定位和投放穴盘苗。其中,定位和机械手的动作通过PLC控制,实现了穴盘育苗的自动化操作。
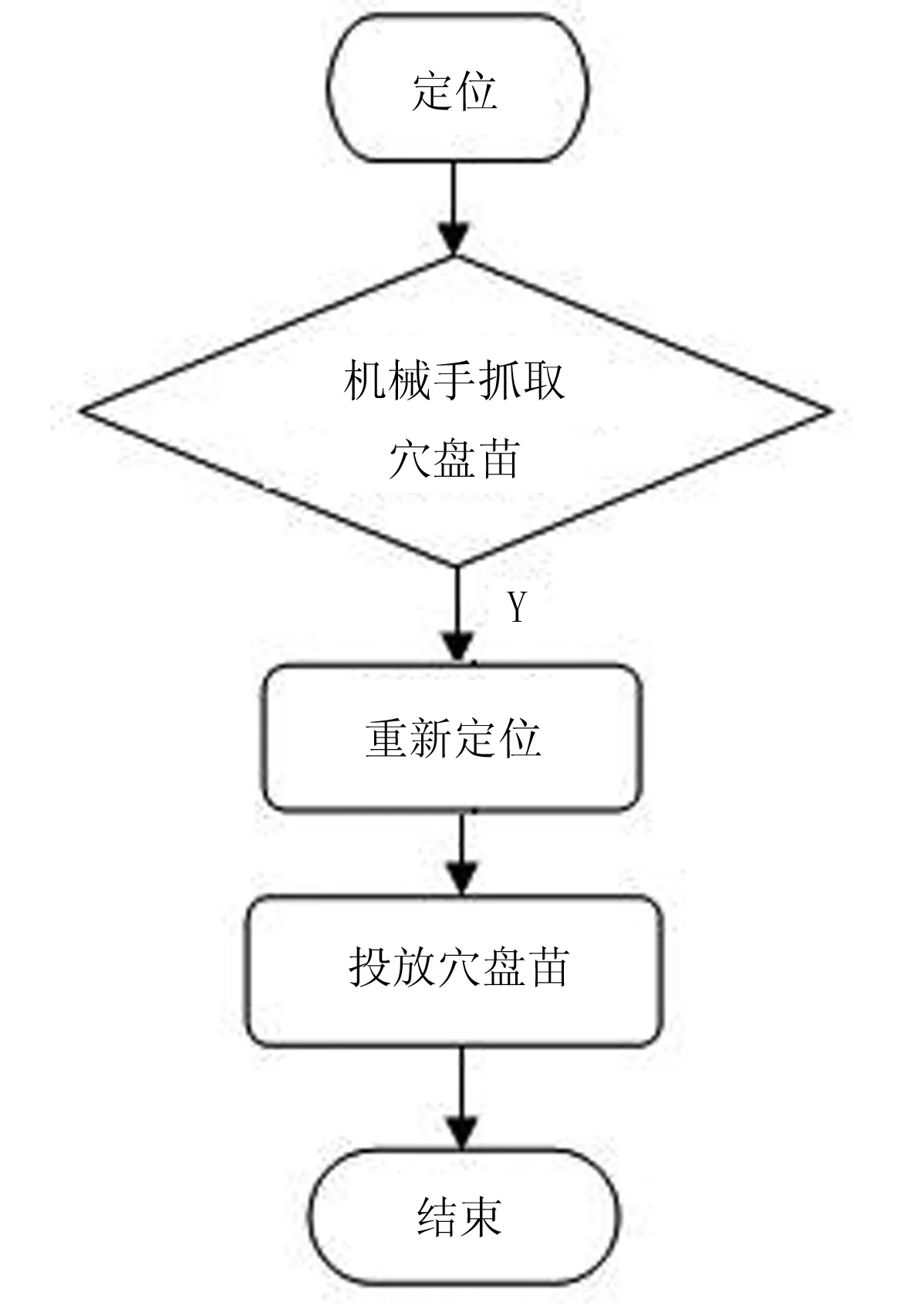
图4 穴盘苗自动移栽流程图
2 蔬菜穴盘钵苗自动取苗机构运动模型
蔬菜穴盘钵苗自动取苗机构主要是由5个椭圆非均匀尺寸组成,理论上实现了传动的无侧隙啮合,使传动机构工作平稳、结构简单、工作效率高,其结构原理的示意图如图5所示。
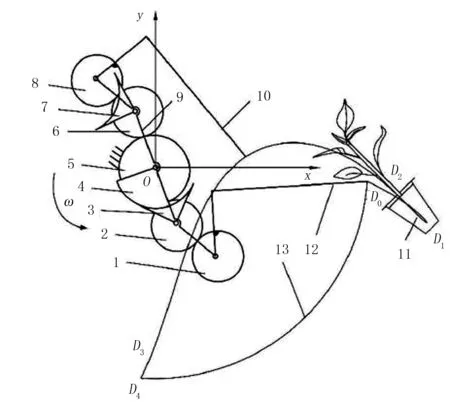
1、2、5、6、8.齿轮 3、7.凹锁止弧 4.凸锁止弧 9.行星架 10、12.取苗爪 11.钵苗机构 13.取苗时的运动轨迹
假设椭圆齿轮的半长轴为a,半短轴为b,M1为行星架的旋转中心,M2为中间轮的旋转中心,相对于起始边旋转过角度φ后,得到行星架和中间轮的旋中心为M1'和M2'。假设与x轴之间的夹角为φ0,M1'M2为行星架M2M1的起始边,啮合位置用极坐标进行表示,于是可以得到
(1)
(2)
当φ>0时,有
r1=M1P
(3)
r2=2a-r1
(4)
其中,以M2'M2为行星架M2M1的起始边,行星架转过的角度为φ21(φ21<0),则有
(5)
(6)
当φ在0~π之间时,φ21在-π~0之间;当φ在0~2π之间时,φ21在-π~-2π之间。因此,可以根据cosφ21>0或cosφ21<0确定φ21的唯一角度,令
φ1=φ0+φ
(7)
则轴心M3可以表示为
(8)
取苗机构的尖点T位移为
(9)
其中,S表示取苗臂的长度,φT=φ0+φ+φ21,利用尖点的位移可以对自动取苗机构进行虚拟仿真,对结构进行优化设计。取苗机构尖点的位移值是机构PLC反馈调节的重要依据,也是远程监控的主要参数。本PLC控制系统的设计采用日本欧姆龙公司的CPM2A系列PLC作为现场的控制设备,并利用AD模块对模拟信号进行处理,系统的设计框架如图6所示。
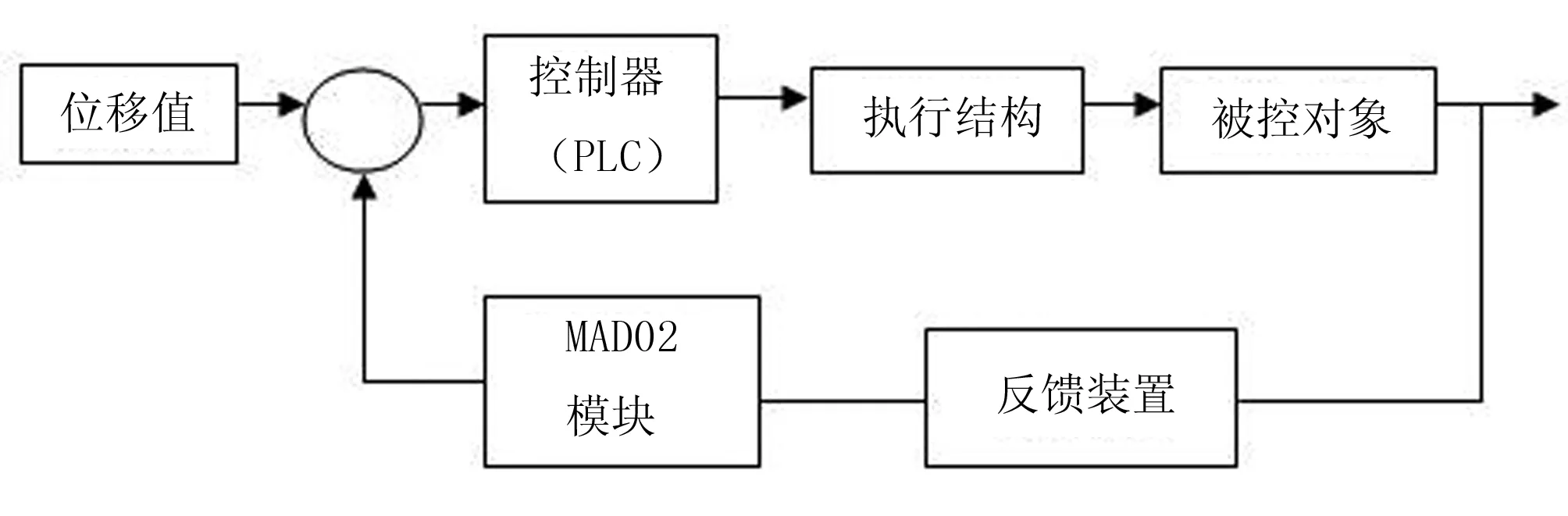
图6 PLC控制系统结构框架图
将模拟仿真得到的位移值通过组态画面输入到给定值中,PLC的数据存储利用A/D转化模块转换为数字量,通过和实际得到的位移轨迹进行对比,确定机构的操作,形成一个闭环控制系统。同时,PLC作为下位机,利用内置的RS-232连接器和上位机进行通信,提高了系统的效率,其原理如图7所示。
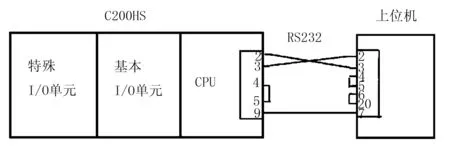
图7 RS-232通讯连接原理图
PLC与上位机一般采用RS-232接口的异步串行方式,C200HS在CPU单元上增加了一个内置的RS-232连接器,因此PLC不再需要使用专用的通讯模块便可以方便地与外部装置进行通讯。PLC和PC的通信接线示意图如图8所示。

图8 PLC与计算机RS232通信接线示意图
图8中,通信的波特率为9 600,数据为是7位,停止位是2位,奇偶校验为偶校验。
3 自动取苗机构实验和虚拟样机测试
为了实现蔬菜穴盘钵苗自动取苗装置的优化设计,采用UG7.0软件设计了取苗机构的虚拟样机,虚拟样机通过齿廓拉伸得到了椭圆齿轮的实体造型,利用约束将拉伸得到的三维实体模型组装成一个装配体,便可以得到蔬菜穴盘钵苗自动取苗装置的虚拟样机,如图9所示。
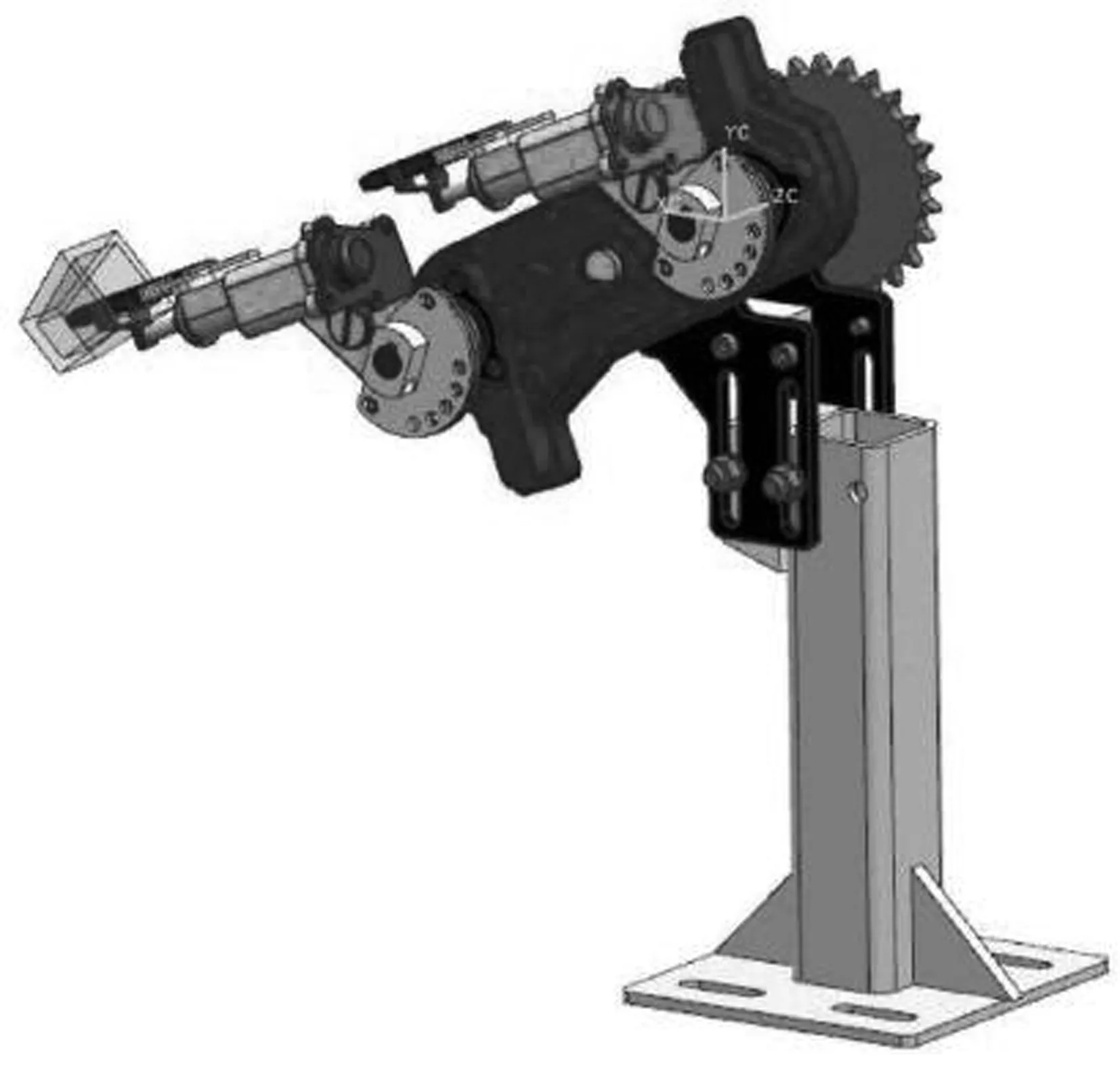
图9 蔬菜穴盘钵苗自动取苗装置的虚拟样机
本次仿真采用自底向上的建模方式,机构共分为支架、齿轮箱和取苗臂,对每个部分分别进行建模,然后组装为子装配体,最后通过约束完成总装配体。
图10为虚拟样机在ADAMS软件中的运动仿真。在ADAMS中主要对取苗机构的取苗片运动轨迹进行仿真,由仿真计算得到了取苗片的合速度随位移变化的曲线,如图11所示。
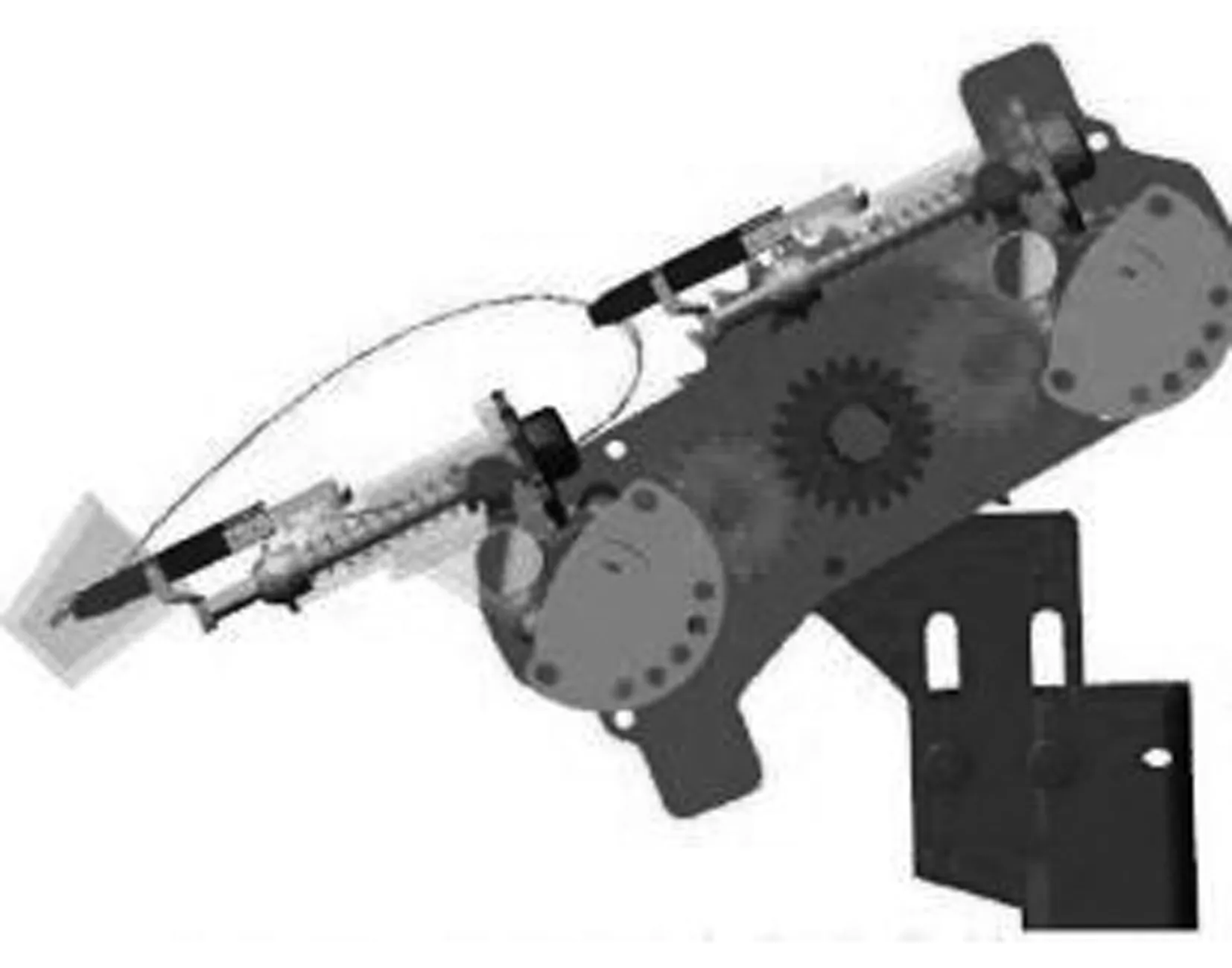
图10 ADAMS运动仿真曲线
由图11可以看出:不同的行星架角位移在尖点处的和速度有所不同,为了使取苗机构达到最佳的速度,可以合速度曲线为参照,通过调整臂长,得到合适的合速度。

图11 取苗片尖点合速度仿真曲线
为了验证虚拟仿真实验结果的合理性和可靠性,对取苗机构进行了实验测试,实验场景如图12所示,首先在苗钵中培育好秧苗,然后利用取苗机构进行取苗,通过测试得到了如图13所示的合速度实验测试曲线。

图12 取苗机构实验测试

图13 取苗片尖点合速度实验测试曲线
由图13可以看出:通过实验测试得到的合速度曲线的趋势同仿真模拟得到的曲线基本一致,从而验证了虚拟仿真的可靠性,因此可以通过虚拟仿真对蔬菜穴盘钵苗自动取苗装置进行合理的优化设计,使其达到最佳的设计效果。
4 结论
为了提高蔬菜穴盘育苗移栽的效率,提高作业机自动化水平和机械化作业质量,设计了一种新的自动取苗装置,并在该装置上配置了5个椭圆齿轮组成行星取苗机构,提高了取苗装置工作的稳定性。利用PLC和PC机设计了机构的远程控制和闭环反馈调节系统,提高了作业的自动化水平和作业精度。使用UG软件建立了取苗机构的模型,将模型导入到ADMAS软件中进行了动力学仿真,得到了取苗片尖点合速度随角位移的变化曲线。采用实验测试的方法对取苗机构进行了测试,将得到的尖点合速度曲线同虚拟仿真结果进行了对比,验证了虚拟仿真的有效性和可靠性。
[1] 韩绿化,毛罕平,胡建平,等.穴盘苗自动移栽钵体力学特性试验[J].农业工程学报,2013,29(2):24-28.
[2] 繆小花,毛罕平,韩绿化,等.黃瓜穴盘苗拉拔力及钵体抗压性能影响因素分析[J].农业机械学报,2013, 44(S1),27-31.
[3] 韩绿化,毛罕平,繆小花,等.基于穴盘苗力学特性的自动取苗末端执行器设计[J].农业机械学报,2013, 44(11): 260-265.
[4] 金鑫,李树君,杨学军,等.蔬菜穴盘苗取苗机构分析与参数优化[J].农业机械学报,2013,44(S1): 1-6.
[5] 李崇光,包玉泽.我国蔬菜产业发展面临的新问题与对策[J].中国蔬菜,2010(15): 1-5.
[6] 方宪法.中国旱作移栽机械技术现状及发展趋势[J].农业机械,2010(1):35-36.
[7] 于红松,张铁中,杨丽.穴盘苗自动移栽机研究现状与发展前景[J].农业机械,2010(2):44-45.
[8] 武科,陈永成,毕新胜.几种典型移栽机[J].新疆农机化,2009(3):12-14.
[9] 李其昀,鲁善文,杨宪武.吊篮式棉花移栽机的研究[J].农机化研究,2006(4):164-166.
[9] 宋鹏,张俊雄.精量播种机工作性能实时监测系统[J].农业机械学报,2011(2):71-74.
[10] 王振华,李文广.基于单片机控制的气力式免耕播种机监测系统[J].农业机械学报,2013,44(S1):56-59.
[11] 董丽梅.山地播种机的研究与设计[D].兰州:甘肃农业大学,2009:19-21.
[12] 徐云峰.小型免耕播种机的设计及试验研究[D].北京:中国农业大学,2005:22-24.
[13] 高焕文,李问盈,李洪文.中国特色保护性耕作技术[J].农业工程学报,2003,19(3):1-4.
[14] 王晋生,王桂英.小麦机械化播种实践[J].农业技术与装备,2009(9):21-22.
[15] 刘蕴贤,倪道明,李从华,等.不同施肥方法对水稻生长及稻田周围水体污染的影响[J].天津农业科学,2007,13(1):31-34.
[16] 吴子岳,高焕文,张晋国.玉米秸秆切断速度和切断功耗的试验研究[J].农业机械学报,2002,32(2):38-41.
[17] 何伟,陈彬,张玲.DSP/BIOS 在基于DM642的视频图像处理中的应用[J].信息与电子工程, 2006, 4(1): 60-62.
[18] 龚菲,王永骥.基于神经网络的PID参数自整定与实时控制[J].华中科技大学学报:自然科学版,2002, 30(10):298-305.
[19] 赵望达,鲁五一,徐志胜,等.PID控制器及其智能化方法探讨[J].化工自动化及仪表,1999,26(6):45-48.
[20] 谷传纲,阎防,王彤.采用改进的BP神经网络预测离心通风机性能的研究[J].西安交通大学学报,1999,33(3):43-47.
[21] 郭艳兵,齐古庆,王雪光.一种改进的BP网络学习算法[J].自动化技术与应用,2002,26(2):13-14.
[22] 秦国成,秦贵,张艳红.设施农业装备技术现状及发展趋势[J].农机化研究,2012,34(3):81-82.
Design of the Seedling Mechanism of Vegetable Seedling Tray Based on PLC Control and Virtual Prototyping Technology
Jiang Yanlei, Han Yanzan
(Henan Polytechnic Institute, Nanyang 473000, China)
The vegetable bowl seedling is one of the most commonly used methods of seedling raising, and its working way is the semi automatic transplanting, which is carried out by the machine to carry out the seedlings. Based on this, a new automatic picking device is designed, and five elliptical gears are proposed. The mechanism of PLC control system, which can realize the continuous automatic operation, and is equipped with remote control and closed loop control. Using the method of virtual prototype simulation, the optimization design was carried out using UG software. The model was imported into ADMAS software. The results were compared with the experimental results.
plug seedling; virtual prototyping; PLC control; closed-loop control; ADMAS simulation
2016-01-25
河南省科技攻关项目(152102110161)
姜岩蕾(1974-),女,河南南阳人,副教授,硕士。
韩艳赞(1984-),男,河南南阳人,讲师,硕士,(E-mail)yzhan1984@hnpi.edu.cn。
S223.94
A
1003-188X(2017)01-0222-05
猜你喜欢
中国特种设备安全(2022年4期)2022-07-08
林业科技(2020年3期)2021-01-21
装备制造技术(2020年4期)2020-12-25
房地产导刊(2020年6期)2020-07-25
四川蚕业(2020年3期)2020-07-16
农机化研究(2019年7期)2019-05-24
农业工程学报(2018年21期)2018-11-05
农机化研究(2018年6期)2018-06-06
农业工程学报(2018年9期)2018-06-01
现代园艺(2018年15期)2018-01-18
