
花生收获机械化技术应用研究与推广
2017-12-15 06:49高雪梅杨同毅尚书旗鹿光耀满玉云刘文帅
农机化研究 2017年1期
高雪梅,杨同毅,尚书旗,鹿光耀,满玉云,刘文帅
(青岛农业大学 a.经济与管理学院;b.机电工程学院,山东 青岛 266109)
花生收获机械化技术应用研究与推广
高雪梅a,杨同毅a,尚书旗b,鹿光耀b,满玉云a,刘文帅a
(青岛农业大学 a.经济与管理学院;b.机电工程学院,山东 青岛 266109)
经过多年的发展,我国花生收获机械技术有了较大的提升,但与发达国家相比,仍相对滞后。为此,通过对当前花生收获机械挖掘输送技术、去土技术及摘果技术、清选分离技术等的应用情况进行对比分析,总结出制约其技术推广的主要问题。结合其推广现状,提出借鉴发达国家农机推广成功经验,加强政策调研和产业调研的全新模式。通过强化优势、弥补弱项,以及搭建创新产业平台建设与平台高效率利用,探索“互联网+农机”的全新机制适合花生收获机械推广应用的发展对策,为整个农机技术的应用研究与推广提供现实依据与理论支持。
花生收获;技术应用;发展推广;对策研究 ;互联网+
0 引言
国家“十二五”规划顺利实施,为促进农村经济发展,工作重点将以转变农机化发展方式、提升发展质量效益为主线,调整优化装备结构布局、主攻薄弱环节机械化、推广先进适用技术,实现农业机械化又好又快的发展[1]。借鉴小麦联合收获机对外服务和跨区作业的成功经验,农民逐渐意识到机械化生产将是增收的重要途径。可以预见,在未来几年发展中,功能完善的根茎类作物收获机械将得以重点开发和应用。
花生是世界各地区广泛种植的经济作物和油料作物,是我国农业结构调整重点扶持发展的农产品。根据国家统计局数据显示:2013年全国油料作物播种面积14 022.62khm2,总产量3 516.99万t。其中,花生种植面积4 632.99 khm2,产量1 697.22万t,分别占33%和48%,总出口量居世界首位。在花生生产中,收获阶段占整个花生生产工作量的58%,发达国家于20世纪50年代末就已全面实现花生生产机械化。伴随着国家对经济作物机械化生产的大力扶持,我国花生机械化收获水平有明显提升,但由于装备的研究开发起步较晚、技术落后,推广不利。目前,国内花生收获仍以传统手工作业和中小型简单机械作业为主,花生联合收获仅在局部产区进行试验示范,与发达国家机械化水平差距较大。因此,大力推广花生收获机械,对于发展花生产业、提高农产品竞争力、促进农村劳动力转移和农民增收及实现农业现代化都具有重要意义。
1 机械化收获技术与推广现状
1.1 技术应用
我国花生收获技术的发展经历了人工收获、半机械化收获、机械化分段收获、机械化联合收获及全程机械化等不同阶段。机械化分段收获技术指将花生的挖掘、输送、去土、摘果、清选、分离及集果等技术分别在不同设备上完成,或者有由同一机器完成部分作业步骤。现阶段我国花生分段收获技术应用的机器设备有挖掘铺放机、摘果机和捡拾机等,如青岛明鸿机械有限公司生产的花生条铺收获机。花生联合收获是所有作业在一台机器上逐步完成,关键技术如表1所示。
1.1.1 输送技术及应用
花生挖掘铺放收获技术分为有序条铺和无序汇集。有序铺放收获机,主要包括机架、夹持输送装置、导杆、传动齿轮、夹持链调节装置及角度调节装置等几部分。工作过程为:花生秧果经夹持输送装置输送到有序铺放装置,在此过程中多路花生秧果汇集成一路进行铺放;由于机架特殊的结构实现花生秧果垂直于机组前进方向倒伏并整齐的铺放在地表进行晾晒。其中,角度调节装置可对花生秧果倒伏铺放的角度进行调节,以达到最佳的收获铺放效果。
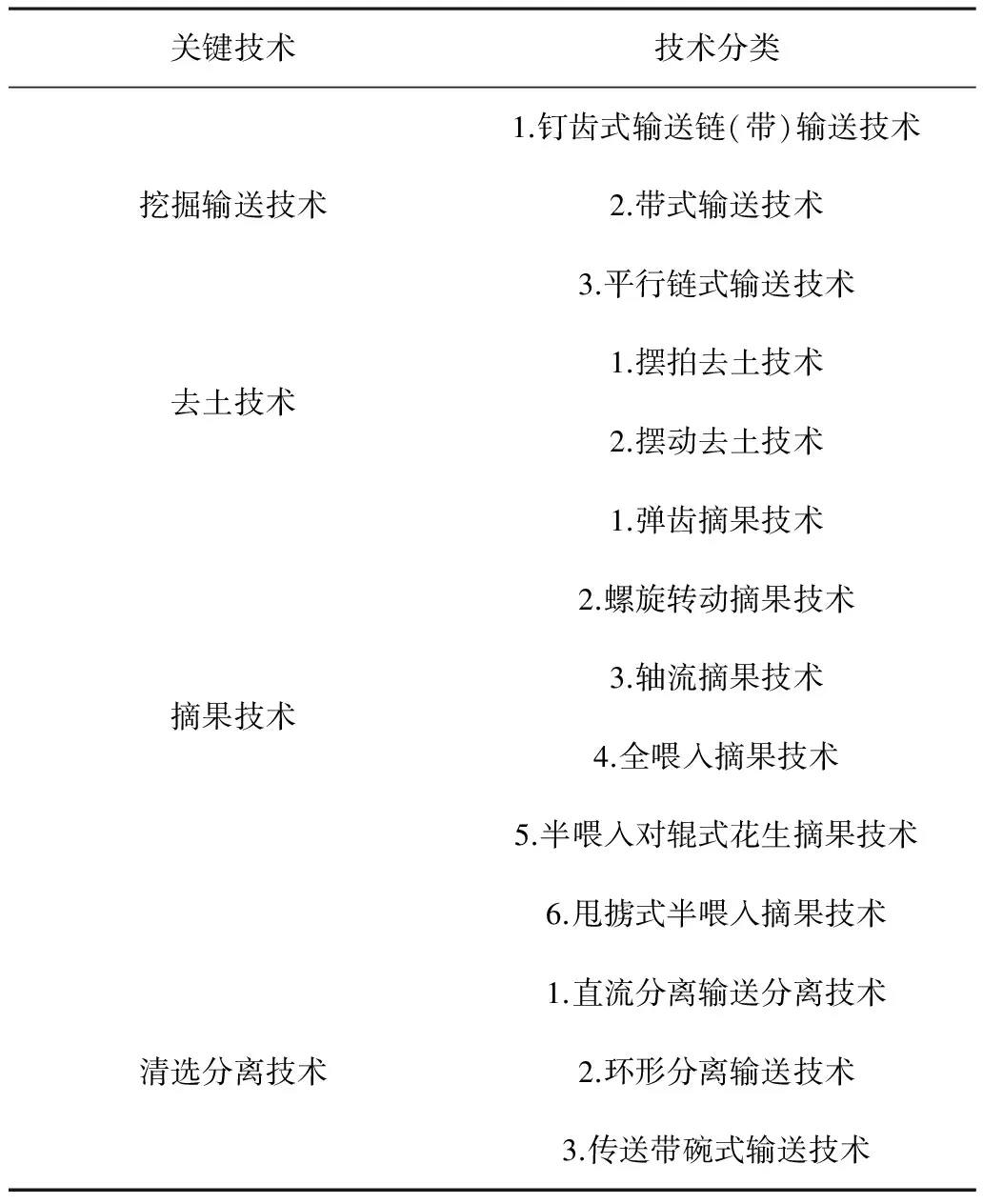
表1 花生机械化收获技术
应用代表机型为4HP-4花生挖掘铺放收获机,如图1所示。其中,夹持链采用大齿链,夹持杆处于浮动状态,可自动调节夹持过程中花生秧夹持力的大小,传动系统简单而稳定。归集导秧创新装置是一种新型升运装置,可实现花生1垄2行同时收获作业,挖掘后的花生秧果经输送装置顺利升运,平稳输送。

图1 4HP-4花生挖掘铺放收获机
1.1.2 去土技术及应用
机械化去土技术分为摆拍去土和摆动去土,现以左右摆拍去土装置为例。摆拍去土时模仿人工去土过程,工作部件直接作用于结果区域拍击和摆动。通过链传动将动力分配到装置的各个机构的传动中,实现筒轴和偏心筒旋转工作;通过连杆推动做往复摆动运动,并带动拍土面板及链轮做摆动运动,产生对花生秧果的连续拍打效果[3];花生果包裹的土壤经拍松、拍碎后与花生荚果分离,掉落到地面上,完成整个去土作业过程。摆动去土的工作原理与摆拍去土工作原理不同,摆动去土根据人工捡拾花生进行摆动去土的作业形式,利用惯性力通过摆动花生秧果实现花生果与土壤的分离[4]。
花生刚被挖出后,植株往往带有大量泥土,迅速去土可以有效保证机器后续作业的正常进行,减少机械掉果。青岛万农达公司和开封市福田机械制造厂对花生去土装置研发具有丰富经验。
1.1.3 摘果技术及应用
摘果技术要满足采摘干净及破损率低的要求,是花生机械化收获的核心技术。其发展过程经历了弹齿摘果技术、螺旋转动摘果技术、轴流摘果技术、全喂入摘果技术、半喂入对辊式花生摘果技术,以及甩掳式半喂入摘果技术。摘果原理类似于人工的甩捋式摘果,如图2所示。工作时,通过输送装置的花生秧果进入摘果部分,旋转拖拉、加速运动,在离心作用下甩出花生;由于重力作用,花生果掉至下方的清选机构,而花生秧受到筒爪齿的不断作用后甩向分离机构[5]。
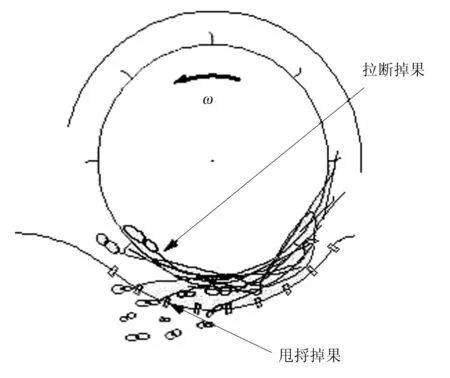
图2 摘果技术原理
花生摘果装置是花生联合收获机的关键部件,对机收花生质量具有直接影响。国内市场上的花生摘果装置以全喂入式为主,半喂入式摘果装置因适用性较差和生产效率难以提高而市场占有率较小。全喂入式花生摘果装置根据滚筒形式不同,主要有钉齿式、篦梳式、差动式和刮板式等[6]。
1.1.4 清选分离技术及应用
清选分离技术是摘到的花生在输送到集果箱中进一步分离杂质的过程,代表机型如青岛农业大学研发的L型输送清选分离机器。其由清选架焊合、动力传动装置、输送链和升运斗装置组成。通过三维软件设计出最佳机架结构,运用ANSYS和ADAMS软件分析花生下落和L型分离清选机构发生碰撞时受力情况,有效降低花生损失率和含杂率。性能参数表2所示。其主动链轮和从动链轮的运送速度快,输送能力强,负荷功率小,实用性强。
清选装置是花生联合收获机的重要组成部分,其工作性能直接影响到损失率及含杂率等指标[7]。根据作业要求和市场调查,自走式花生联合收获机含杂率以不大于3.0%为宜,但目前国产机型的含杂率普遍在5. 0%左右[8]。因此,清选分离装置的结构创新及性能优化,直接影响到花生收获机的整体性能指标及推广应用情况。

表2 L型输送清选分离机性能参数
1.2 代表机型
1.2.1 国外方面
美国、加拿大等发达国家地区,经过多年的技术发展与市场优选淘汰,花生收获机械的农机农艺结合程度高,分段式收获与联合收获技术较为成熟。现在市场上比较典型的分段式花生收获机有 KMC 生产的2、4、6、8行花生挖掘收获机,AMADAS 公司生产的ADI型2、4、6、8、12行等系列花生收获机和Pearman Corpora-tion生产的1~8行系列花生收获机[9]。并且,美国公司John Deere和Kelley Manufacturing研制生产的花生分段收获机械已成为世界先进技术水平应用的代表[13]。
联合收获机械方面,比较有代表性的有美国Kelley Manufactuongoring公司生产的KMC3374-4、KMC3376-6和KMC2002等3种型号的牵引式花生联合收获机[10]。目前,受市场欢迎的有Pearman公司生产的1~8行系列收获机[11],John Deere 公司生产的25型花生联合收获机和111型自走式花生联合收获机[12]。图3为国外代表性花生联合收获机型。
1.2.2 国内方面
20世纪60年代,我国开始花生收获机械的研制,引进消化吸收国外先进技术并进行国产化开发。如4H-1500型花生收获机及东风-69型等。到21世纪初,青岛农业大学与万农达机械公司共同研制出4H-2型花生收获机。该机型应用摆动挖掘原理,将挖掘和除土在同一部件依次完成,简化了花生机械的机体结构,使分段收获有突破性进展。近年来,随着政府、企业、科研单位对农机研发投入的增加,花生收获机械化进入快速发展的阶段,代表性的分段收获机主要有4HFS-150花生收获机、4H-2A花生收获机及4H-1500分段收获机等。

图3 国外花生联合收获机
现阶段普遍应用的联合收获机主要为半喂入型花生收获机,部分胶东地区应用了全喂入花生收获机,如4HL-160型牵引式花生收获机、ZZHL-60型自走式花生收获机、4HQL-2 型花生收获机和4LH2 型花生收获机等。半喂式4HBL-2型花生联合收获机和4HB-2A型花生联合收获机已进入花生联合收获机补贴目录,广受农户欢迎。图4为国内研制的代表性花生联合收获机。

图4 国内花生联合收获机
1.3 技术应用推广现状
中国是世界花生的主要产区,种植几乎覆盖全国,但由于各省份之间地貌千差万别,地区间土壤特征不尽相同,因此花生收获机械化技术发展很不平衡,各地区技术推广水平差距较大。如我国北方地区土壤疏松、地势较为平坦,花生种植规模化,有利于推广机械化生产技术,因此机械化水平和程度相对较高。而南方花生生产区多丘陵,地形多变,土壤多为砂砾土和红壤土,种植分散,不适合大型农机作业,技术推广速度慢,花生收获机械化程度较低。
观察图5国内花生机械化水平分布图发现,我国花生收获机械的开发研制和应用推广主要集中在花生的主产区。因自然条件优越,适合大型机械规模化种植,辽宁的机械化水平最高,机械收获率大于60%;其次是山东,机械化收获占一半以上;河北、河南、江西、新疆等地区占15%左右;而陕西、安徽、吉林等地仅占近10%,地区间的花生机械化生产水平差距较大。
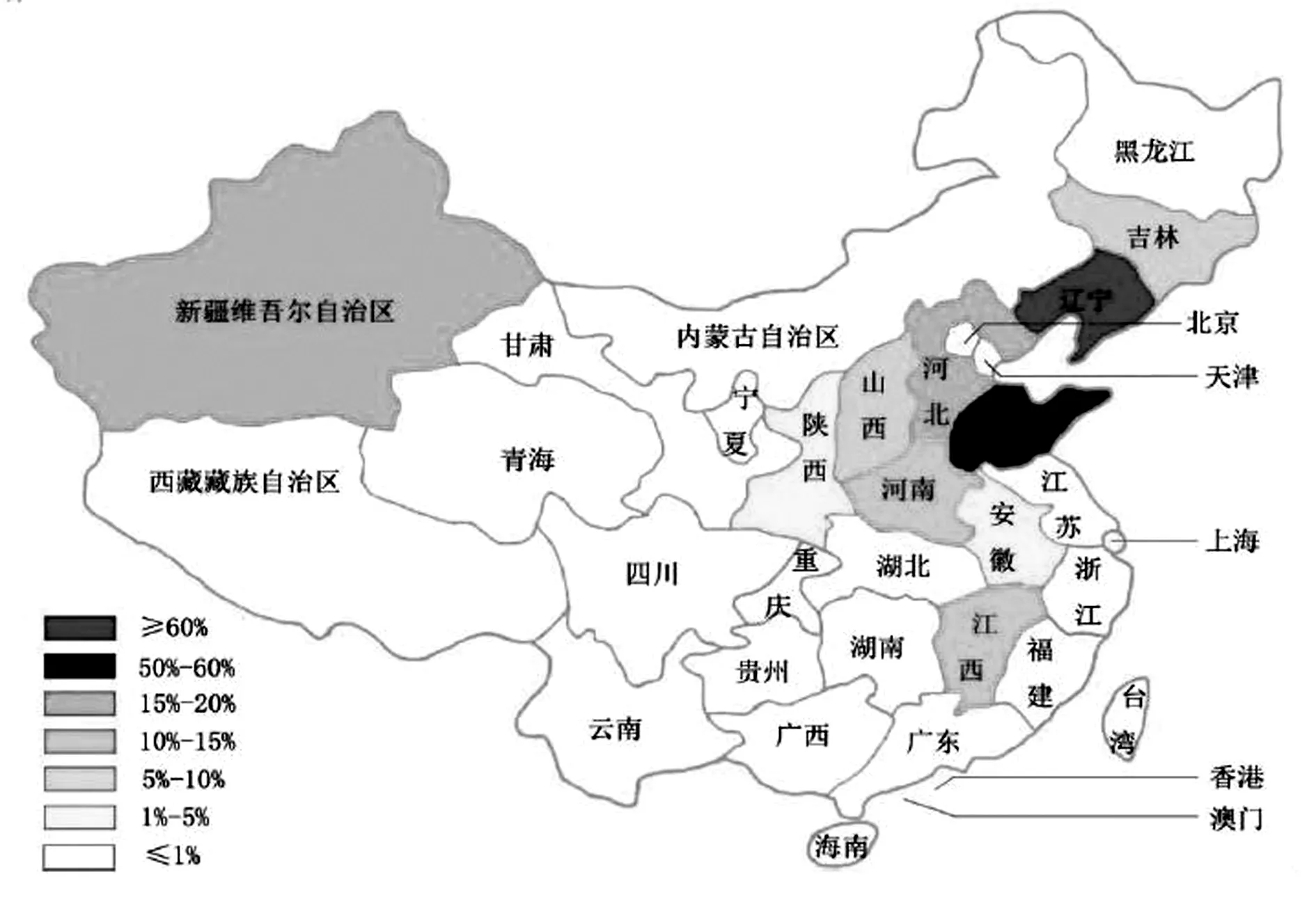
图5 国内花生机械化收获水平
截止到2014年,我国研制的花生分段收获机累计销售52 700台多,联合收获机2 017台多,销售额近2.7亿元,收获面积达7905万hm2。但花生机收面积与机耕、机播及其他农作物相比比例较小。由图6机收面积比较可知:在整个农业收获体系中,小麦、玉米机收面积分别为95.1%、27.4%,花生机收面积仅为6.4%。中国花生耕种收综合机械化水平为36.44%,其中机械化耕作、播种和收获水平分别为56.56%、32.86%和19.89%,花生收获机械化及自动化程度明显偏低[14]。作为重要的创汇农产品,花生机械化收获技术应用不完善,无法满足农业发展的需求。
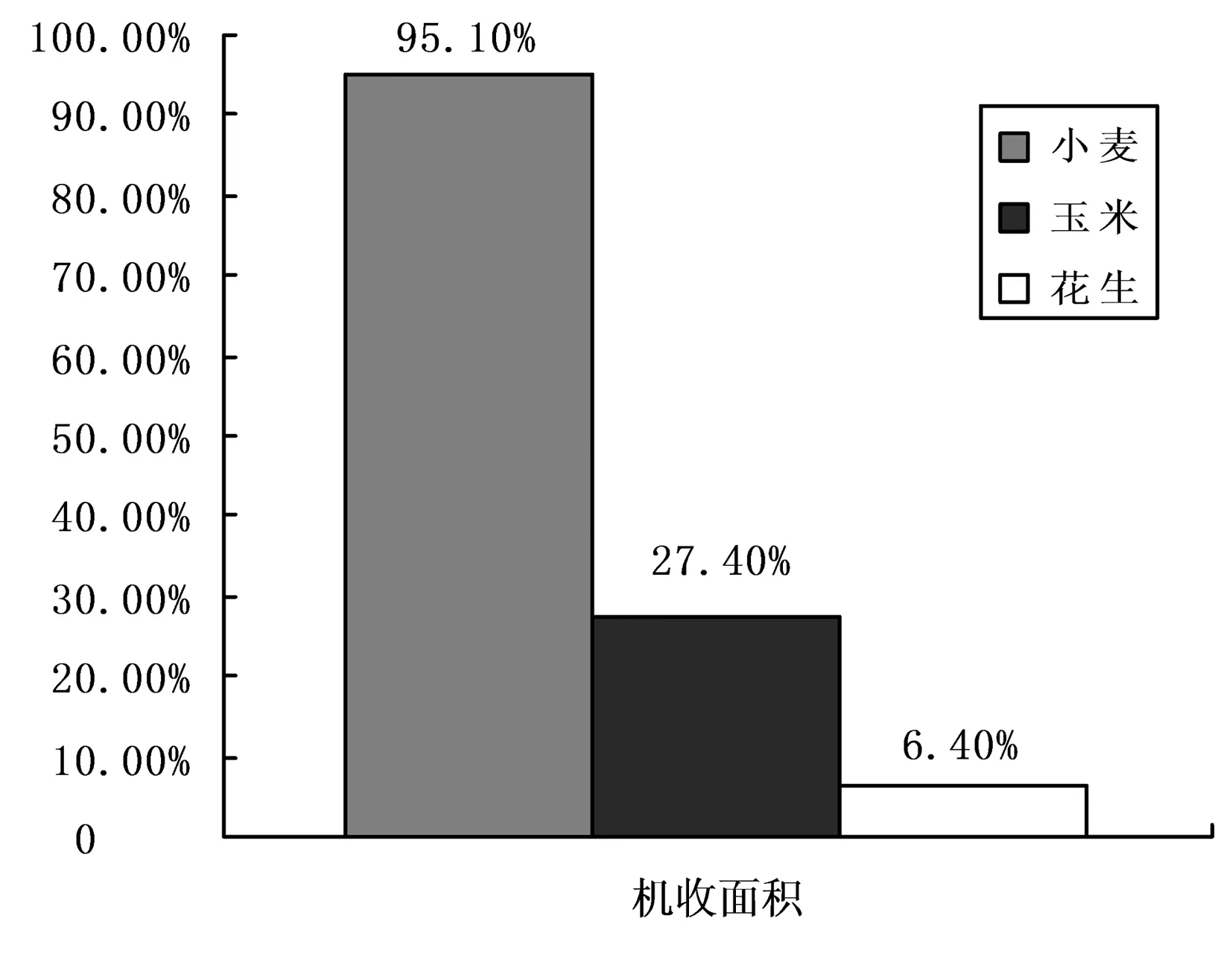
图6 机收面积比较
2 制约技术推广的问题分析
2.1 技术层面问题
1)目前,花生收获机的设计主要针对某一品种和所在地区的生长环境进行设计,其通用性、兼容性和适应性较差,虽然部分花生收获机可以兼收大蒜、马铃薯等,但工作性能仍需进一步改善;与发达国家相比,标准化差距较大。随着国际化进程的加快,国外农机巨头纷纷在我国建厂,对我国农机企业的发展带来冲击,传统生产花生收获机械的企业如青岛弘盛机械有限公司及万农达机械有限公司等急需转型升级。
2)经过多年的科研攻关,以国家项目支撑为依托,部分高校、科研院所在花生收获技术层面已经有了很大的突破;但与生产企业对接不够,技术成果真实转化率相对较低。
3)当前国内生产花生收获机械的企业仍以中小型为主,缺乏大型企业的参与。中小企业基本上没有专门的研发机构,多以经验改进为主,部分生产企业互相抄袭,技术难以保护,给技术推广增加了难度。
2.2 农艺层面问题
长期以来,受传统种植模式的影响,农户在种植花生的时候,只单纯地为了提高花生的收获产量,往往忽略如何适应机械化来进行播种、田间管理级收获等问题,导致花生不管是在播种还是收获等机械的推广与使用方面遇到很大阻力。
农机和农艺相匹配是花生收获机械化发展的必经之路,根据农业部办公厅下发的《花生机械化生产技术指导意见》,其播种部分要求:一垄双行垄距控制在80~90cm,垄上小行距28~33cm,垄高10~12cm之间,穴距14~20cm;平作播种要求宽行距45~55cm,窄行距25~30cm,以便机械化标准种植和配套收获[16]。但我国花生品种繁多,花生产区土壤性质多样,且同一产区以及不同产区栽培方式和多种种植制度并存,特别是间套种植方式的存在,花生机械工作部件与幅宽不相适应,加大了花生机械收获的技术难度。
2.3 推广方面问题
近些年,我国从国外引进了多种花生收获机械,也制造出了通过消化吸收国外先进技术的花生收获机械;但由于在花生的农艺、选种、播种等各方面的不同,导致在使用引进或改进后的花生收获机械效果并不能达到预期的效果。为了贯彻落实中央一号文件精神,进一步解放农村劳动力,大力发扬自主创新精神,结合先进的国外技术在国内花生收获机械上充分发挥作用,并加大推广力度也是我们当前的重中之重。
经过调研发现,高素质的农机推广队伍、先进的推广方式和充足的推广经费是促进农机推广的三个重要因素。而现阶段我国推广人员的结构不合理,基层农机工作者匮乏,相关激励制度不完善,使推广人员缺乏积极性,制约先进农业科技成果的转化与推广;推广方式上,我国长期以来农业教育、科研、推广分属不同部门和单位,推广体系分为种植业、农机、畜牧、渔业等各自独立的系统[19],受传统观念的禁锢,主管部门往往有多一事不如少一事的做法,导致主管部门之间的沟通不顺畅,不能为农机的推广等工作提供准确的数据支撑,进而影响农机推广效果;从经费上看,进入 21 世纪以后,上到中央政府,下到地方政府,对农业的资金投入大多集中在农业生产和技术研究层面,对农机推广的可使用经费一直严重不足[20]。同时,项目过度分散,资金不多,影响了资金效益的发挥。
3 发展建议
3.1 攻克花生收获机械化的技术难点
1)根据不同产区种植模式的不同,并考虑生长环境因素,在山东、河北、河南等华北平原地区主推适应花生收获的半喂入联合收获机;对黑龙江、吉林、辽宁等东北地区主推适合大地块收获的花生联合收获机。二是东北地区为联合收获与分段收获并存技术模式。三是对江苏、湖南、江西等长江中下游平原地区主推分段收获与半喂入联合收获共同发展的花生收获机。四是对广西、广东,四川等丘陵地区主推适合本地花生收获的分段收获方式[21]。各地区因地制宜,发展特色技术模式。
2)分析土壤特性及种子物理机械特性对设备性能的影响,为技术装备的性能提升提供基础。深入进行挖掘、分选、集果、升运等共性关键技术研究,探索花生机械化收获技术指标的最佳范围,提高农业机械与农艺的结合度,快速促进农机农艺有效融合。基础研究与应用研究相结合,进一步提高设备的可靠性、稳定性,以性价比优势参与国际竞争,实施“走出去”战略,并以东南亚、中东、非洲等国为突破口,逐步进入美洲等发达国家的市场。
3.2 创新推广体系
1)通过创新机制使高水平平台建设与平台高效率利用结合,强化优势, 弥补弱项。针对花生不同主管部门的不同职责,构建既分工明确、责任明确,又沟通顺畅、合作共赢的长效机制,通力推进花生收获方面的教学、科研、推广及生产等各方面合作,打造花生产业的新增长极,加快花生收获机械技术推广应用步伐。在现有花生收获机械推广体系的基础上,扩宽原有单纯以农技推广部门、代理商为主的推广方式,探索以政府引导、市场决断、产学研推多种方式、多种渠道协同推广的全新推广服务机制,提高在推广每个环节的服务质量,吸引更多的用户参与花生收获机械的推广,加快花生收获机械推广的进程。
2)探索“互联网+农机”的全新机制。由于国内生产花生收获机械的企业均为传统企业,宣传推广方式仍以经销商代理为主,但我国花生种植分布不均,成熟的花生收获机械的推广应用与互联网行业的结合程度明显不够。当前国家大力支持 “互联网+”的发展,农机行业应该抓住难得政策机遇,应借助互联网平台,形成“互联网+农机”的模式,推进花生收获机械化的技术应用与推广工作。
4 结束语
当前,我国花生种植面积有明显下降的趋势,其主要原因在于传统的收获过程繁琐,劳动强度大,严重影响其经济效益。因此,花生收获技术的升级、转化、应用与推广显得格外重要。今后,应抓住“互联网+”的历史机遇,引进先进推广理念,多种应用交错结合,形成全新机制,促进农业结构转型。
[1] 农业机械化管理司2015年工作要点.农业部农业机械化管理司[J].农机质量与监督,2015(4):9-11.
[2] 赵思静,王东伟,王延耀,等.有序铺放花生收获机的研制[J].农机化研究,2013,35(10):73-79.
[3] 胡志超.半喂入花生联合收获机关键技术研究[D].南京:南京农业大学,2011:21-22.
[4] 王东伟.花生联合收获机关键装置的研究[D].沈阳:沈阳农业大学,2013.
[5] 尚书旗,王建刚.4H-2型花生收获机的设计原理与运动特性分析[J].农业工程学报,2005(1):81-91.
[6] 杨然兵.4HQL-2型花生联合收获机主要装置的设计与试验研究[D].沈阳:沈阳农业大学,2009.
[7] 孙同珍,尚书旗,李国莹,等.4HQL-2型全喂入花生联合收获机摘果及清选部件的研制[J].农机化研究,2009,31(6):54.
[8] NY/T502-2002,花生收获机作业质量[S].
[9] 孙玉涛,尚书旗,王东伟,等.美国花生收获机械现状与技术特点分析[J].农机化研究,2014,36(4):7-11.
[10] Kim sw,Misra AK.Kelley Manufacture Corporation Peanut harvesting[J].Parnan Corporation,1992(2):2-6.
[11] Mathew,David JB,Sethuv.Parman Corporation Pearman Peanut Digger-Shaker-Inverters[J].Georgia,2006(3):3-8.
[12] Ralph H.John Deere Peanut Combines[J].Machinery Feature,1997(3):41-43.
[13] 王亮.中国花生全程机械化发展状况及其在新疆的应用[J].中国农学通报,2014,30(2):161-168.
[14] 中国农业机械化年鉴2010[M].北京:中国农业科学技术出版社,2011:26-30.
[15] 吕小莲,王海鸥,张会娟,等.国内花生机械化收获的现状与研究[J].农机化研究,2012,34(6):245-248.
[16] 农业部办公厅:花生机械化生产技术指导意见[EB/OL].2013-09-10.http://news.aweb.com.cn/20130910/638294100.shtml,2009.
[17] 胡志超,王海鸥,彭宝良,等.国内外花生收获机械化现状与发展[J].中国农机化,2006(5):40-42.
[18] 郑月男,尚书旗,杨然兵,等.山东省花生种植和收获现状的研究[J].农业机械,2009(7):52-54.
[19] 刘振伟,李飞,张桃林.农业技术推广法导读[M].北京: 中国农业出版社,2013: 318-340.
[20] 中国农村财经研究会调查组.关于我国农业科技推广财税政策的建议[J].农村财政与财务,2014(1) : 3-6.
[21] 胡志超,王海鸥,胡良龙.我国花生生产机械化技术[J].农机化研究,2010,32(4):240-243.
[22] 蒋亦元.农机科技创新中的农机与农艺相结合问题[J].农业机械学报,2007(3):179-181.
[23] 李安宁.依法加快推进农机化技术推广体系建设[J].农机科技推广,2013(4):7-9.
[24] 胡志超,彭宝良,尹文庆.多功能根茎类作物联合收获机设计与试验 [J].农业机械学报,2008,39(8):58-61.
[25] 王晓燕,梁洁,尚书旗.半喂入式花生摘果试验装置的设计与试验 [J].农业工程学报,2008,24(9):94-98.
[26] 尚书旗,李国莹,杨然兵.4HQL-2型全喂入花生联合收获机的研制[J].农业工程学报,2009,25(6):125-130.
[27] 尚书旗,王建刚,王芳艳.4H-2型花生收获机的设计原理及运动特性分析[J].农业工程学报,2005,21(1):87-91.
[28] 胡志超,彭宝良.4LH2型半喂入自走式花生联合收获机的研制[J].农业工程学报,2008,24(3):148-153.
[29] 杨然兵,尚书旗.花生联合收获机柔性夹持装置设计与试验 [J].农业机械学报,2010(8):67-71.
[30] 周瑞宝.中国花生生产、加工产业现状及发展建议[J].中国油脂,2005(2):5-6.
Research and Popularization of the Application of Peanut Harvesting Mechanization Technology
Gao Xuemeia, Yang Tongyia, Shang Shuqib, Lu Guangyaob,Man Yuyuna,Liu Wenshuaia
(a.College of Economics and Management; b.College of Mechanical and Electrical Engineering, Qingdao Agricultural University, Qingdao 266109, China)
After many years of development, China's peanut harvesting machinery technology has been greatly improved, But compared with the developed countries, it still lags behind. Through the comparison and analysis of the application of the main technology, such as the technology, the technology of the harvest machinery, the technology of the soil, the technology of the soil, the technology of the separation and the separation technology, the main problems are summarized. Combined with the status of its popularization, the new model of agricultural mechanization promotion in developed countries is put forward, which is to strengthen the successful experience of agricultural mechanization, to strengthen policy research and industry research. By strengthening the advantages and make up for weaknesses, build industrial innovation platform construction and platform efficient use, explore “Internet + farm” of the new mechanism for the Countermeasures for the development of peanut harvesting machinery popularization and application, research and popularization of the whole agricultural technology provide realistic basis and theoretical support.
peanut harvest; technical application; development; research on strategy; internet +
2015-12-10
国家公益性行业(农业)科研专项(201203028.4);青岛农业大学社会科学项目(614Z10)
高雪梅(1990-),女,山东兖州人,硕士研究生,(E-mail)1427283316@qq.com。
杨同毅(1965-),男,山东荣成人,教授,研究生导师,(E-mail)tyyang@qau.edu.cn。
S233.4
A
1003-188X(2017)01-0237-06
猜你喜欢
儿童时代·快乐苗苗(2022年10期)2022-12-09
中国农村科技(2021年12期)2021-12-28
河北科技师范学院学报(2020年1期)2020-01-19
———2020 款中农博远玉米收获机值得期待
河北农机(2020年1期)2020-01-11
河北农机(2020年2期)2020-01-08
儿童时代·快乐苗苗(2016年4期)2016-11-07
学苑创造·A版(2016年7期)2016-07-06
浙江大学学报(工学版)(2016年9期)2016-06-05
小天使·二年级语数英综合(2015年5期)2015-05-15
