林业机器人车轮与土壤相互作用力学性能仿真1)
2017-12-27 01:01苏永涛刘滨凡王伟
东北林业大学学报 2017年12期
苏永涛 刘滨凡 王伟
(黑龙江省林业科学院,哈尔滨,150081) (东北林业大学)
林业机器人车轮与土壤相互作用力学性能仿真1)
苏永涛 刘滨凡 王伟
(黑龙江省林业科学院,哈尔滨,150081) (东北林业大学)
为了提高林业机器人在林区地面的行走性能,以东北林业大学帽儿山实验林场为试验地,在分析林区土壤力学特性基础上,依据车轮与林区土壤相互作用力的关系,建立了轮胎-林区土壤力学模型;应用力学分析软件,对林业机器人的车轮与林区土壤力学性能进行了仿真研究。结果表明:在现有结构和受力情况下,轮胎不会陷入林区土壤中。
机器人车轮;林区土壤;力学性能;力学模型
四轮移动机器人被运用到很多领域,如林区火源探测、林区巡防监测、林区沙地探险等,要求机器人有良好的环境适应性,能够正常的在狭窄的地方和松软的地面上行走,完成预定的任务。在实际的行走过程当中,林区土壤条件对机器人的行走有很大影响,因此,在研究机器人的行走性能时,需要充分考虑地面的实际情况,即车轮与地面的相互作用力。
目前,针对行走性能的研究,主要借助于计算机仿真分析技术。薛雪[1]利用有限元分析的原理,建立了轮胎与土壤接触的三维有限元模型,对轮胎变形量和土壤下陷量进行了研究,为车辆性能改进提供了可靠依据;伦佳琪[2]利用轮胎-林区土壤的有限元模型,对不同工况下二者接触区域的变化进行了研究,得到了胎压与载荷的关系。本文通过对车轮与林区土壤相互作用力的分析,建立了轮胎-林区土壤力学模型,对林业机器人的车轮与林区土壤相互作用力学性能进行了仿真研究,旨在为提高机器人在林区的行走性能提供参考。
1 试验地土壤力学特性计算方法
本研究的林业机器人是东北林业大学机电工程学院机器人技术实验室研制的轮式机器人,试验地为东北林业大学帽儿山实验林场(地理坐标为东经127°18′~127°41′6″,北纬45°2′20″~45°18′16″)。试验地地面相对比较松软,为了确保机器人能够在地面上正常行走,不发生车轮陷入土壤中等现象,需要对车轮与土壤的相互作用进行仿真研究,以验证设计的机器人的行走可靠性。准确计算地面与车轮的相互作用力,需要对土壤的力学特性进行分析。
土壤的力学特性,主要包括土壤的承压特性和剪切特性。土壤的承压特性,主要指当有负载作用在土壤时,土壤被压实发生沉陷,沉陷包括永久变形及弹性变形两部分。将负载去掉时,沉陷的部分能否恢复到原来的状态取决于它的弹性变形值。土壤只有在负载很小时才会发生弹性变形,其大小是使土壤蹦裂所需的负载。从弹性形变到塑性形变的转变不是突然发生的,变形是由负载表面逐渐向全部土壤扩展,因此对中间部分的土壤应力应变的计算十分复杂。
地面压力与土壤下陷量之间的关系曲线见图1。为方便计算,将曲线OC假设为2条直线OA和AB。由图1可见,直线OA对应着变形较小的情况,直线AB对应着变形较大的情况,均可表示为压力与下陷量呈线性关系。
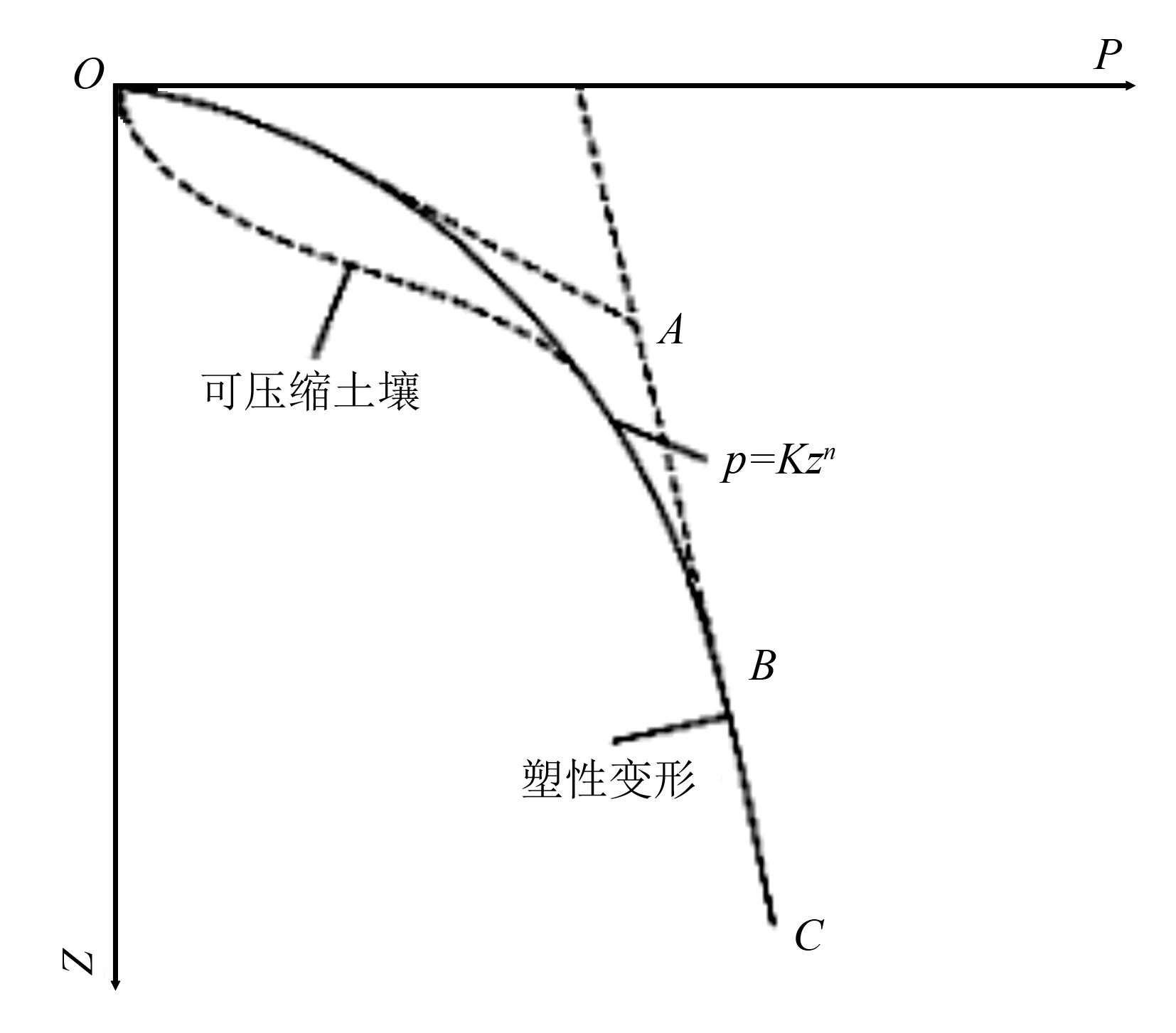
图1 地面压力与土壤下陷量之间的关系
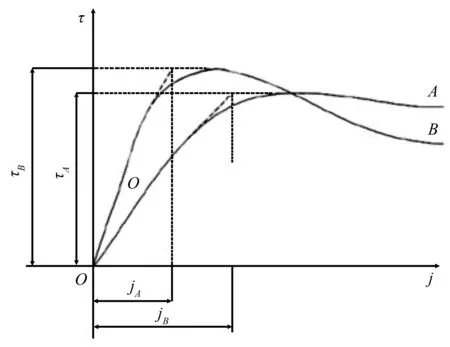
图2 剪切应力和林区土壤位移的关系
2 车轮与林区土壤相互作用的力学模型
将车轮底面与林区土壤接触部分内的任意一点的作用力,分解为切线方向的剪应力和法线方向的正应力(见图3)。
根据Bekker的压力-下陷模型,正应力σ=((kc/b)+kφ)zn。式中:kc为林区土壤的内聚力模量,kφ为内摩擦模数,n为下陷指数,z为车轮的下陷量,b为车轮与林区土壤接触面的短边长。
根据Janosi土壤剪切模型[3],剪应力τ=τmax(1-e-j/k)。式中:k为林区土壤的剪切变形模量,j为剪切位移,τmax为林区土壤的剪切强度。
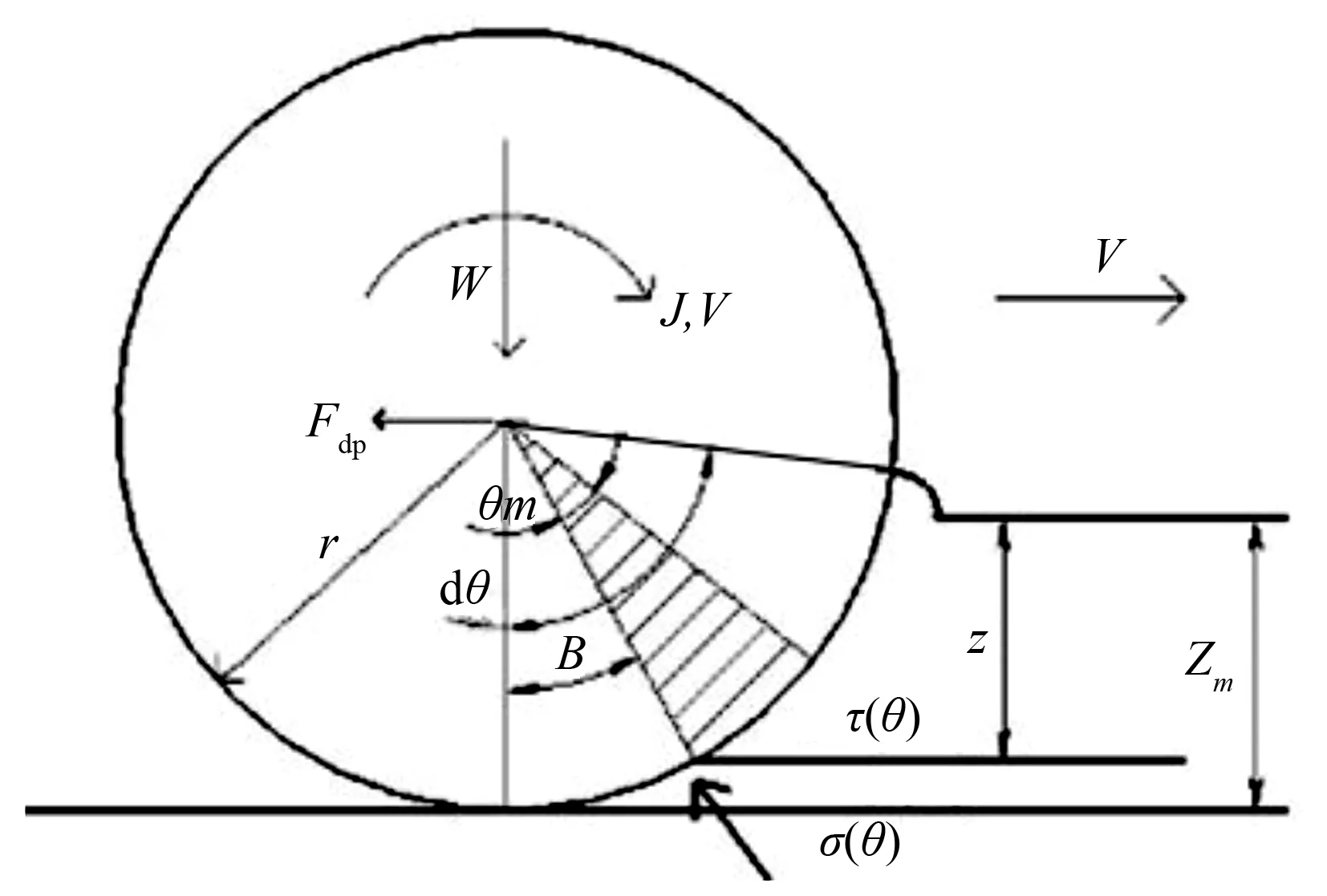
W为施加在车轮上的重力;T为车轮前进时的转矩;Fdp为机器人行走时车轮受到的挂钩牵引力;σ为车轮底面与林区土壤接触部分内任意一点P所受到的正应力,τ为车轮这一点所受到的剪应力。
图3刚性驱动轮的受力示意图
剪切强度满足摩尔-库伦屈服准则:τmax=c+σtanφ。式中:c为林区土壤内聚力,φ为林区土壤的内摩擦角。
由τ=τmax(1-e-j/k)可见,车轮受到的剪应力τ与土壤的剪切位移j有关,而剪切位移j存在如下关系:j=r[(θm-θ)-(1-s)(sinθm-sinθ)]。式中:r为车轮半径,θ为车轮接触点P处法线与铅垂线的偏角,θm为车轮的渐进角,s为车轮的滑转率。
车轮的滑转率,通常定义为:s=(rω-v)/rω。式中:ω为车轮滚动的角速度,v为车轮前进的线速度。
从上面的分析过程可以得出,车轮与土壤相互作用的正应力与切应力的大小,随着接触点P的位置不同而发生变化。根据图3,对车轮可以得出水平方向和垂直方向的力平衡方程以及对圆心的转矩平衡方程:

20世纪70年代初,我国开始进行果园采摘机的研究,刚开始我国的研究成果大部分是一些简单的采摘机械,如手持电动采摘机和电机式采摘机等等,而对椰果采摘机的研究大多还是采用机械式的采摘。在20世纪70年代末,随着计算机技术和自动化控制技术的迅速发展,美国开始研究各种农业机器人。由于不断的学习和交流,我国在2007年新疆机械研究所研制了我国第一台多功能果园作业机,即LG-1型多功能果园作业机。这台机器的研制成功标志着我国在果实的采摘方面从机械化向机器人方向发展迈开了重要的一步。


根据以上各式,可求得机器人前进时车轮的力学特性参量。
3 有限元建模及仿真分析
3.1 仿真流程
建模及仿真过程流程图如图4所示。
①建模。土壤模型的尺寸为长1 000 mm、宽120 mm、高300 mm;车轮直径为160 mm、宽40 mm(见图5)。
②定义材料。仿真过程中,林区土壤选为自定义材料,模型参数设定为在林区土壤的物理特性分析中给出的数据;车轮由于形变很小,材料设定为橡胶。

图4 仿真过程流程图

图5 土壤和车轮模型
③施加载荷。为了能够准确的分析车轮与地面的相互作用力,需要在车轮与地面上设定相应的载荷,林区土壤地面上添加固定几何体约束。在本体结构设计中,选定小车所受的重力为100 N,平均分配到4个车轮上,每个车轮受力为25 N,在车轮轴上添加垂直地面25 N的力。考虑到机器人小车行走过程中重力分布不均匀和机器人小车的再开发,机器人小车可能会加载更多的传感器,或者机械手臂等负载的情况,这里对每个车轮上所承载的重力为35 N的情况进行了仿真研究作为对比,添加载荷如图6所示。
④设置连接。车轮与地面的相触面组设为无穿透,零部件接触设置为允许贯通。

图6 添加载荷示意图
⑤网格划分。对车轮和地面模型进行网格划分过程中,由于车轮比地面的结构相对更加复杂,分别给出了整体网格划分图和车轮网格划分图(见图7、图8)。

图7 整体网格划分
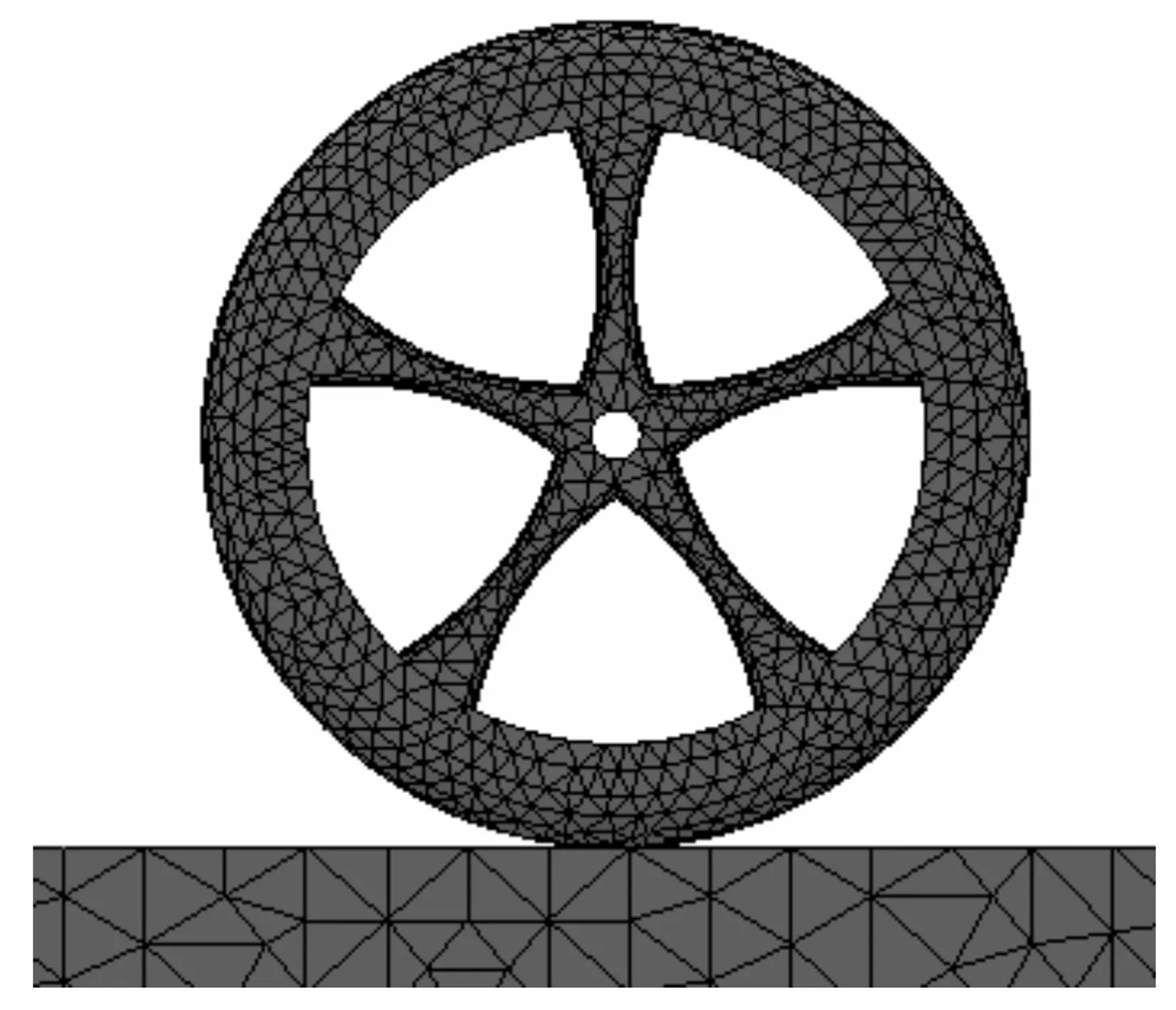
图8 车轮网格划分
⑥运行。将网格划分好后,运行算例并求得仿真结果。
3.2 静止状态车轮与土壤相互作用的有限元分析
由图9可见:车轮与地面之间的作用力相对地面不大,应力的主要分布区域为车轮与地面的接触部分。当施加的重力为25 N时,最大的应力为0.638 MPa;当施加的重力为35 N时,最大应力为0.714 MPa。
由图10可见:车轮的位移最大的地方在车轮的顶部,随着与地面的接近则位移越来越小,复合正常的逻辑。当施加的重力为25 N时,最大位移为4.287 mm;当施加的重力为35 N时,最大位移为4.901 mm。由图11可见:重力较大时,车轮对林区土壤的压迫较大,林区土壤的形变也会大。
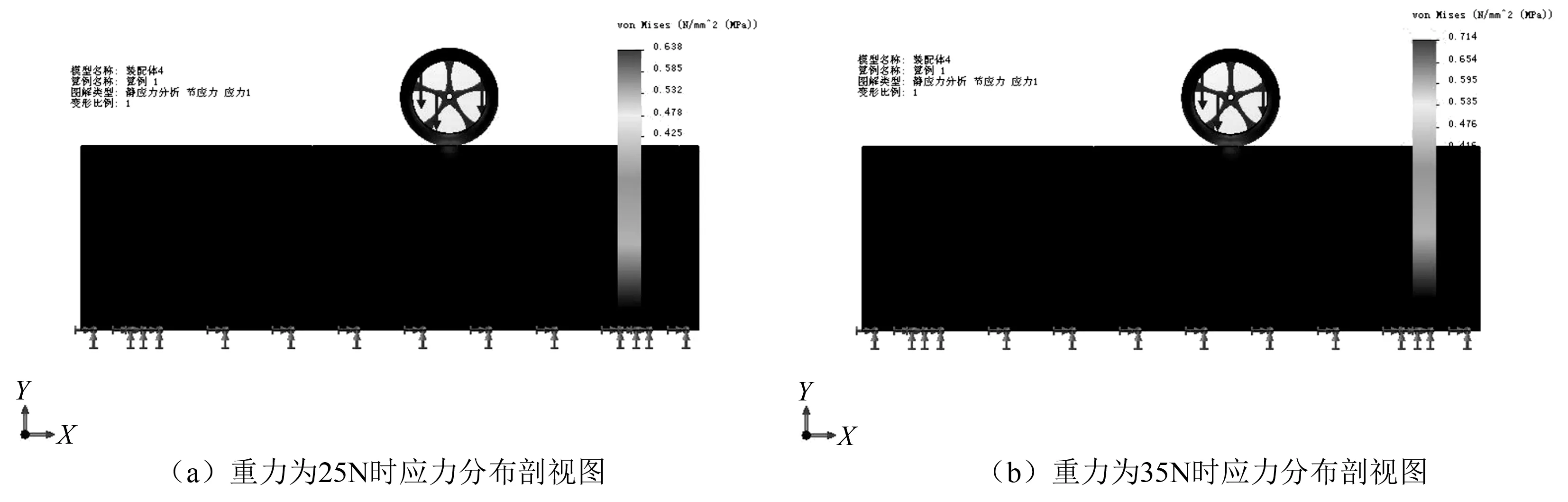
图9 应力分布剖视图

图10 位移分布图
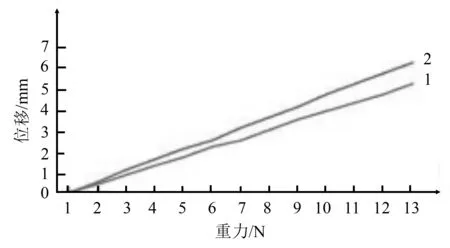
1为重力为25 N时位移曲线;2为重力为35 N时位移曲线。
由图12可见:应变主要分布在地面与车轮接触的部分,地面的应变不大,证明小车在静止状态下,不会陷入地面中。当施加的重力为25 N时,最大应变为2.665;当施加的重力为35 N时,最大应变为3.463。
由图13可见:车轮与地面相互作用的过程中,对地面的挤压。当施加的重力为25 N时,地面土壤被压缩的体积为0.15%;当施加的重力为35 N时,地面土壤被压缩的体积为0.17%;完全不会使小车的车轮陷入到土壤中。

图12 应变分布剖视图

图13 设计洞察图
从仿真结果看,机器人小车静止在林区沙土地面上时,应力、应变都主要集中在车轮与林区土壤相接处的部分,地面的挤压变形也很小,车轮不会陷入土壤中。
4 结论
在研究和分析帽儿山实验林场土壤的力学特性基础上,建立了车轮-林区土壤相互作用的力学模型,并进行了车轮与地面相互作用的仿真研究。通过对轮胎-林区土壤的相互作用力学模型进行有限元仿真分析可见,在现有结构和受力情况下,轮胎不会陷入林区土壤中。
[1] 薛雪.车辆轮胎与土壤接触变形的有限元分析[D].杨凌:西北农林科技大学,2016.
[2] 伦佳琪.基于轮胎沉陷量的轮胎与土壤接触试验及有限元分析[D].杨凌:西北农林科技大学,2016.
[3] 全齐全.月球车车轮与土壤作用的力学特性测试系统的研制与实验[D].哈尔滨:哈尔滨工业大学,2007.
[4] 陈明祥.弹塑性力学[M].北京:科学出版社,2007.
[5] 费学博.高等动力学[M].杭州:浙江大学出版社,1991.
[6] 庄继德.计算汽车地面力学[M].北京:机械工业出版社,2001:14-29.
[7] 孟为国.农业车辆田间土壤承载特性参数的在线估计与检测[D].南京:南京航空航天大学,2009.
SimulationonMechanicalPerformanceofWheelForestSoilInteractioninForestryRobot
Su Yongtao, Liu Binfan
(Heilongjiang Academy of Forestry, Harbin 150081, P. R. China); Wang Wei(Northeast Forestry University) Journal of Northeast Forestry University,2017,45(12):72-75,82.
Robot wheel; Forest soil; Mechanical model; Mechanical properties
1)黑龙江省博士后基金项目(LBH-Z15194)。
苏永涛,男,1973年3月生,黑龙江省林业科学院博士后科研工作站,博士后科学研究;现工作于东北林业大学文法学院,副教授。E-mail:syt200810@163.com。
刘滨凡,黑龙江省林业科学院,研究员。E-mail:liubinfan88@126.com。
2017年7月20日。
张 玉。
S714.2
In order to improve the walking performance of robot, taking Maoershan Forestry Experiment Station of Northeast Forestry University as an experimental site, we analyzed the interaction force between wheel and forest soil, and established a soil mechanics model of tire forest zone. A mechanical analysis software was used to simulate the soil mechanical properties of wheel forest in a forest robot. From simulation research, under the existing structure and force condition, the tires will not sink into the forest soil.
猜你喜欢
科学大众(2022年23期)2023-01-30
山西林业(2021年2期)2021-07-21
中华养生保健(2020年10期)2021-01-18
科普童话·神秘大侦探(2020年3期)2020-05-11
小读者(2019年24期)2020-01-19
汽车观察(2019年2期)2019-03-15
红土地(2018年8期)2018-09-26
现代园艺(2018年2期)2018-03-15
中学生数理化·八年级物理人教版(2017年6期)2017-11-09
小天使·一年级语数英综合(2016年9期)2016-05-14