基于扩展滑模观测器的PMSM转子位置估算方法研究
2018-01-01 00:04史传军王富东季清
科学与财富 2017年30期
史传军+王富东+季清
摘 要: 针对传统滑模观测器在估算永磁同步电机转子位置滞后和抖动的问题,本文通过扩展滑模观测器,将滑模控制和锁相环控制结合在一起,来提取电机转子的位置。通过实验,对新方法与传统滑模观测器方法作了详细的比较,结果验证了新方法可以避免传统滑模参数估算角度严重滞后和抖动的问题。
关键词: 永磁同步电动机;反电动势; 扩展滑模观测器; 锁相环
0 引言
永磁同步电机由于具有高效节能、高功率密度以及强过载能力等优点,其无传感器控制系统成本低,可靠性高,已成为当前电气传动领域的一个重要方向。无传感器控制的核心是转子位置和转速的估计,调速系统性能的好坏取决于估计的精度和动态响应速度。
目前,无传感器控制主要分两种技术:一类是利用永磁同步电机的凸极效应及高频信号注入的方法,但具有高频噪声的问题,对信号检测精度要求较高,且需要设计多个滤波器,实现起来比较复杂。另一类是观测器法,直接或间接地从电机反电动势中提取位置信息。观测器通过比较实际系统和模型输出的误差, 调节模型输入, 使模型状态变量逼近真实系统状态。一般有基于Kalman滤波的位置观测器,滑模观测器和状态观测器。滑模观测器是一种基于反电动势或磁链估计的中高速方法,通过开关函数构建状态变量的误差反馈,获得了优良的动态性能,且对自身参数变化和外部扰动均具有较强的鲁棒性,但是滑模控制的鲁棒性是通过选择较大的控制增益来实现的,而在实际应用中由于切换开关的延迟和滞后、以及状态检测误差,容易使系统产生抖振现象。为了较好克服抖振问题,采用锁相环(PLL) 技术可以很好地实现对有关状态观测器或开环计算得到的位置信息进行闭环控制, 以减少位置偏差
本文采用扩展滑膜观测器结合锁相环方法与传统的滑膜观测器进行比较,并且通过实验的方法验证了算法的可行性。
1 传统滑模观测器
在静止α-β坐标系下,忽略磁滞、涡流损耗的影响,永磁同步电机理想的数学模型如下:
(1)
式中
iα,iβ—定子电流α -β轴分量;
uα,uβ—定子电压α -β轴分量;
eα,eβ—反电动势α -β轴分量;
Ls—定子电感;
R—定子电阻;
Ψf —转子磁链;
ωr —转子转速。
根据滑模变结构控制的基本理论和静止α-β坐标系下永磁同步电机的数学模型,构造定子电流滑模观测器:
(2)
式中 k—滑模增益。
由式(2)减式(1)可得估计电流的误差方程
式中:
定义滑模面为: S= (Sα Sβ )T = (i α-iα ,i β-iβ ) =[0 0]
根據滑模理论,当滑模增益k 足够大时,满足广义滑模存在条件,状态变量趋向滑模面,系统进入滑模状态。系统稳定后,状态变量在滑模面上下抖动,根据等效控制理论,可得
K 中不仅包含了反电动势的信息,而且含有bang-bang 控制产生的高频信号,将不连续的含有高频成分的切换控制量经过适当的低通滤波后得到等效控制量,即估计反电动势 eα 、 eβ 。转子位置信号从估计反电动势中提取出来
反电动势通过低通滤波器来获得,引入了相位延迟。该延迟与低通滤波器的相位响应直接相关,其截止频率越低,对应固定频率的相延迟越大。
由于滑模变结构控制在滑动模态下伴随着高频抖动,因此估计反电动势中将存在高频抖动。如果直接将这种抖动引入算术运算,高频抖动将被放大,进而造成较大的速度以及转子位置估计误差。
2 扩展滑模观测器
2.1 扩展滑模观测器滤波的设计
当用传统滑模观测器,估算的马达的反电动势会有很大的纹波。为了克服纹波,加入了一阶低通滤波器。滤波器会引起实际的反电势和估算的反电势相位滞后。这个滞后取决于低通滤波器的截止频率。如果截止频率是个常数,这样会存在几个问题。当截止频率低时,在高速的时候相位滞后比较严重,如果截止频率比较高,在低速时估算的反电势抖动比较严重因为没有足够的滤波。传统滑模观测器的截至频率一般选择在中间速度,但是在高速的时候效果并不好。因此,滤波器的设计对角度补偿非常重要。
对于扩展滑模观测器,当运行频率小于一半的截止频率,滤波器的截止频率是一个常数。当运行频率大于截至频率一半时,截止频率一般选择两倍的运行频率。这个方法,可以保证在高速时运行的相移比较小。这样保证了一个可靠的转子位置估算。
2.2滑模角度估算滤波器
PLL是一种能使输出信号在频率和相位上与输入信号同步的电路,即系统进入锁定状态 (或同步状态)后,震荡器的输出信号与系统输入信号之间相差为零,或者保持为常数它主要由三部分组成,分别是鉴相器(PD)、环路滤波器(LF)和电压控制器(VCO)。
数字锁相环是一个相位反馈控制系统,在数字锁相环中,由于误差控制信号是离散的数字信号,而不是模拟电压,因而受控的输出电压的改变是离散的而不是连续的;此外,环路组成部件也全用数字电路实现.
数字锁相环的结构:数字锁相环的一般由数字鉴相器(DPD, Digital Phase Detector)、数字环路滤波器(DLF,Digital Loop Filter)、数字压控振荡器(DCO,Digital Control Oscillator)三部分组成.
DPD: 数字鉴相器也称采样鉴相器,是用来比较输入信号与压控振荡器输出信号的相位,它的输出电压是对应于这两个信号相位差的函数。它是锁相环路中的关键部件,数字鉴相器的形式可分为:过零采样鉴相器、触发器型数字鉴相器、超前—滞后型数字鉴相器和奈奎斯特速率取样鉴相器.endprint
DLF: 数字环路滤波器在环路中对输入噪声起抑止作用,并且对环路的校正速度起调节作用.
DCO: 数控振荡器,又称为数字钟。它在数字环路中所处的地位相当于模拟锁相环中的压控振荡器(VCO)。但是, 它的输出是一个脉冲序列,而该输出脉冲序列的周期受数字环路滤波器送来的校正信号的控制。其控制特点是:前一采样时刻得到的校正信号将改变下一个采样时刻的脉冲时间位置.
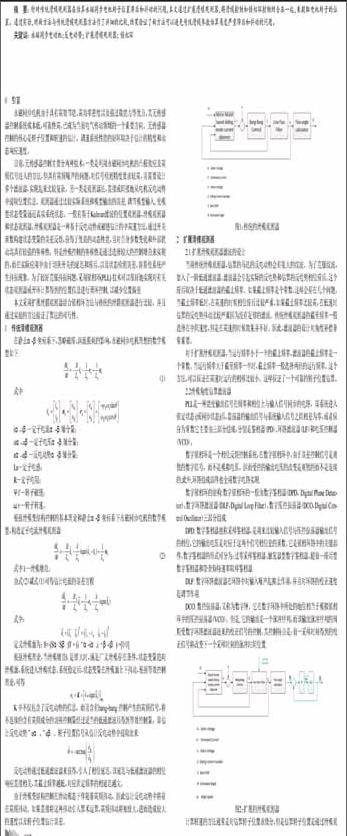
计算转速的方法通常是对估算转子位置求微分,但是估算转子位置是通过滑模观测器法提取出来的,滑模控制存在的抖振及其他方面的干扰,导致估算转子位置存在毛刺,这些微小的误差,反应到转速上就是很大的脉动,甚至是尖锋。为了克服这种转速计算的缺点,一般将转子位置通过低通滤波器滤波以后再进行微分,而低通滤波器的引入,必然引入幅值的衰减和相位的滞后,估算效果并不是很好。扩张滑模观测器根据锁相环电路对频率和相位的跟踪特性,采用类似于锁相环的滤波器来计算转子位置。这个滤波器的的参数可以调节来确保响应速度,不会产生二次相移如图2所示。
3 基于扩展滑模位置估算的实验分析:
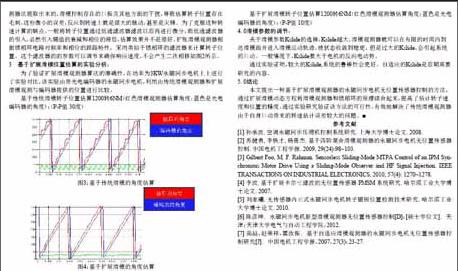
为了验证扩展滑模观测器算法的准确性,在功率为3KW永磁同步电机上上进行了实验对比,该实验由带光电编码器的永磁同步电机,利用由传统滑模观测器和扩展滑模观测与编码器提供的位置进行比较。
基于传统滑模转子位置估算1200转6NM(红色滑模观测器估算角度:蓝色是光电编码器的角度):(P-P值 30度)
基于扩展滑模转子位置估算1200转6NM(红色滑模观测器估算角度:蓝色是光电编码器的角度):(P-P值 10度)
4.0滑模参数的调节:
关于滑模参数Kslide的选择,Kslide越大,滑模观测器就可以在有限的时间内到达滑模面并进入滑模运动轨迹,使状态收敛到稳定, 但是过大的Kslide,会引起系统的抖动。一般情况下,Kslide要大于电机的反向电动势。
通过实验证明,较大的Kslide,系统的鲁棒性会更好。自适应的Kslide是后期需要研究的内容。
5.0结论
本文提出一种基于扩展滑模观测器的永磁同步电机无位置传感器控制的方法,通过扩展滑模动态方程将滑模观测器和锁相环的原理结合起来,提高了估计转子速度和位置的精度,通过实验研究验证该方法的可行性,有效地解决了传统滑模观测器由于自身抖动带来的转速估计误差较大的问题。
参考文献
[1] 孙承波. 空调永磁同步压缩机控制系统研究. 上海大学博士论文. 2008.
[2] 苏健勇, 李铁才, 杨贵杰. 基于四阶混合滑模观测器的永磁同步电机无位置传感器控制. 中国电机工程学报. 2009, 29(24):98~103.
[3] Gilbert Foo, M. F. Rahman. Sensorless Sliding-Mode MTPA Control of an IPM Synchronous Motor Drive Using a Sliding-Mode Observer and HF Signal Injection. IEEE TRANSACTIONS ON INDUSTRIAL ELECTRONICS, 2010, 57(4): 1270~1278.
[4] 李波. 基于擴展卡尔曼滤波的无位置传感器 PMSM 系统研究. 哈尔滨工业大学博士论文. 2007.
[5] 刘家曦. 无传感器内嵌式永磁同步电机转子磁极位置检测技术研究. 哈尔滨工业大学博士论文. 2010.
[6] 陈彦坤.永磁同步电机新型滑模观测器无位置传感器控制[D]:[硕士学位文].天津:天津大学电气与自动工程学院,2012.
[7] 尚喆,赵荣祥,窦汝振.基于自适应滑模观测器的永磁同步电机无位置传感器控制研究[J].中国电机工程学报,2007,27(3):23-27.endprint
猜你喜欢
微电机(2022年8期)2022-10-12
微特电机(2021年11期)2021-11-16
郑州大学学报(工学版)(2020年2期)2020-06-16
电子制作(2019年15期)2019-08-27
汽车电器(2019年2期)2019-03-22
电子测试(2018年14期)2018-09-26
电测与仪表(2017年24期)2017-12-19
电测与仪表(2016年22期)2016-04-12
电测与仪表(2015年9期)2015-04-09
电子设计工程(2014年18期)2014-02-27