
直线驱动型并联机器人反向动力学分析与验证
2018-01-17 08:02吴超宇钱小吾
农业机械学报 2017年12期
吴超宇 钱小吾 余 伟 于 今 程 敏
(1.重庆大学机械传动国家重点实验室, 重庆 400044; 2.镇江高等专科学校基础部, 镇江 212002)
引言
并联机器人结构的特殊性,使其与串联机器人相比,具有刚度大、承载能力强、精度高、自重负荷比小及动态响应性能好等一系列优点,近年来已成为机器人研究领域的主要热点之一[1-2]。并联机器人整体结构简单、紧凑,驱动部分均布于固定平台,这些特点使它具有良好的运动学和动力学特性。由于并联机器人机构是由多关节、多连杆组成,具有多个输入和输出,通常是一个多自由度、高度非线性、多参数耦合的复杂系统[3-5],因此其运动学和动力学数学模型的建立是复杂的,求解比较困难。国内外学者对各类型并联机器人的运动学和动力学作了大量的研究[6-15],ROMDHANE[8]提出了一种解析法求解位置正解。ZENEBE[10]通过螺旋代数理论对平移类并联机器人进行了速度与加速度的研究,提出了一种用于加速度分析的海塞矩阵关系。建立雅可比矩阵和海塞矩阵是目前比较常用的方法,并且只与行位有关,不需要求导。动力学常用的方法是牛顿-欧拉法、拉格朗日法、虚功原理法、Hamilton法等,NABAT等[13]和PIERROT等[11]、HUANG等[15]分别就各自的类Delta机构建立了简化动力学模型,并通过仿真和试验验证其模型。
本文在借鉴前人研究的基础上,根据直线驱动型并联机器人的几何结构模型,利用矢量法建立机器人的运动学模型,推导出运动学逆解、速度和加速度模型;利用虚功原理建立并联机器人的动力学模型 ,分析机器人机械系统中各运动部件在虚位移下对应的广义力,并通过Matlab和ADAMS联合仿真和负载特性试验验证所建立的动力学理论模型的正确性。
1 机构简介与坐标系建立
如图1所示,本文研究的直线驱动型并联机器人由静平台、动平台、同步带电缸、滑块、U型虎克铰、3组平行四边形支链杆件组成,每组支链分别通过2个虎克铰(U副)连接动平台与滑块,滑块通过平移副(P副)由同步带电缸驱动。3组电缸的投影是120°,均匀分布,3组电缸与水平面呈一个固定的角度,下端交于一点,3个电机安装在同步电缸的上方,直线驱动3个滑块,平行四边形支链结构采用炭纤维制造,质量轻,体积比较小,具有比较好的动态响应性能。

图1 直线驱动型并联机器人三维模型Fig.1 Three dimensional model of linear driven parallel robot1.静平台 2.交流伺服电机 3.同步带电缸 4.滑块 5.U型虎克铰 6.平行四边形支链 7.动平台

图2 直线驱动型并联机器人原理图Fig.2 Schematic of tripod parallel robot

图3 单支链原理图Fig.3 Schematic of single typical chain
图2是直线驱动型并联机器人的原理图,图3是单个支链的原理图,设笛卡尔直角坐标O{x,y,z}在静平台△A1A2A3的中心O点处并且在动平台△B1B2B3的中心P处建立一个移动的动笛卡尔坐标P{x′,y′,z′},由于动平台与静平台平行,并且这个并联机构只有3个平移自由度,所以x轴与x′轴平行,并且x轴沿着OA1方向,向量OA1平行于PB1,z轴均朝上,3条运动直线DiEi相交于M点,并且与静平台相交于Ai(i=1,2,3),并且静平台的半径为a。3个长度为l的杆与动平台相交于Bi,半径
为b,P关节的滑块在限定的Di与Ei之间移动,角度α是静平台与DiEi导轨的夹角。角度φi是x轴与静平台向量OAi的夹角,因为静平台与动平台平行,所以夹角也适用于动平台。
图3中,Di为同步带轮的中心点,Ci是经过同步带轮中心Di沿电缸轴向直线与过滑块与连杆的虎克铰中心Fi的垂直电缸导轨直线的交点,Fi是滑块与连杆的连接虎克铰的中心,Bi是连杆与动平台的虎克铰的中心,P是动平台的几何中心,Ei是选定的驱动轴的原点,滑块到同步带轮中心Di的距离是di(i=1,2,3)。H为滑块的高度,也就是虎克铰到滑块的距离。
2 运动学分析
2.1 位置逆解模型
位置逆解模型解决了动平台的位置与驱动变量的关系问题。如图3所示,点Ai与Bi关于O与P的位置向量可以写成
(1)
(2)

lei=Li-disi-Hi
(3)
其中
Li=P+bi-ai
(4)
这里ei是FiBi的单位向量,di代表第i个滑块的线性位移,si代表相应的DiEi的单位向量,Hi是滑块的高度,它的模长可以表示为|h|是个定值,si与Hi可以表示成
(5)
l2=(Li-disi-Hi)(Li-disi-Hi)T
(6)

(7)
其中si与Hi是垂直的2个向量,所以si与Hi的乘积是0。式(7)可以简化成
(8)
其中
所以可以得到
(9)
因为E为负值,并且坐标系中z轴是朝上的,所以这里取负根号的结果。
由式(3)可以求出从动杆的单位向量ei为
ei=(Li-disi-Hi)/l
(10)
2.2 速度模型
对式(3)关于时间求导,可以得到
(11)
(12)


ωi——从动杆FiBi的角速度
式(12)左右两端分别点乘ei,可以得到
(13)
将3个从动杆的式(13)分别写出,这3个标量方程可以写成矩阵形式,为
(14)
其中


Jx——正向运动学雅可比矩阵
Jd——逆向运动雅可比矩阵
当驱动器不在奇异点时,可以得到并联机器人的雅可比矩阵

(15)
其中
(16)
式(16)是直线驱动型并联机器人的3×3的雅可比矩阵,它表示了动平台的速度与驱动器的关系。
(17)
由式(17)可以看出,当e1、e2、e3中间的2个向量线性相关时,也就是并联机构的从动杆会出现2个相互平行、或者3个都平行以及共面的情况时,会有det(Jx)=0,这时机构出现多自由度,当从动杆与电缸方向垂直时,会出现det(Jd)=0,此时机构沿一个方向刚化,也就是死点。所以这两类奇异位都与并联机器人的参数与位置相关。
将式(12)两边分别叉乘ei,可以得到第i个从动杆的角速度
(18)
由于杆件不会绕它的轴线转动,可以得到杆件相对于静平台的角速度
(19)
其中
(20)
式中E3——3×3的单位矩阵

从动杆在静坐标系的中心速度是
(21)
将式(19)代入式(21)并且简化可以得到
(22)
(23)
Jvωi是从动杆的连接雅可比矩阵,反映的是从动杆在静坐标系的线速度与角速度。
2.3 加速度模型
对速度模型式(12)关于时间求导,可以得到加速度
(24)
式中a——动平台加速度
式(24)两边分别点乘ei可以得到滑块的加速度为
(25)
将滑块的加速度写成标准形式

(26)
(27)

分别代表整个并联机器人滑块的加速度与动平台的加速度。
式(24)左右两边分别叉乘ei,可以得到第i个从动杆的角加速度
(28)
对式(21)关于时间求导可以得到从动杆相对于静平台的中心加速度为
(29)
将滑块的加速度式(25)与从动杆的角加速度式(28)代入式(29),可以得到简化的从动杆的线性加速度

(30)
3 动力学分析
并联机器人的动力学表述了机构与关节力之间的联系。并联机器人的正向动力学是已知机构驱动关节的时间变化规律去求解末端知悉机构在工作空间的轨迹和速度加速度,并联机器人的逆向动力学是已知执行机构的运动轨迹去求解驱动器的运动规律,正向动力学对于系统的仿真实验意义重大,而逆动力学则是系统优化的基础。本文采用达朗贝尔形式的虚功原理来进行计算。虚功原理表明一个静态平衡的系统,所有外力的作用,经过虚位移,所作的虚功,总和等于零。当整个系统受到保守力或者非保守力以及惯性力产生的虚位移时,系统的每个部分一直处于动态平衡状态。假设机械系统的每个零部件都是刚性的,也就是不会在外力状态下产生形变,摩擦力可以被忽略不计,唯一产生变化的虚功与输入输出力与力矩的运动有关。
3.1 各运动部件的动力学模型
(1)动平台:作用在动平台质量中心的外力与惯性力可以表示成
(31)

式中fe——作用在动平台质量中心的外力
ne——作用在动平台质量中心的力矩
OIP——动平台中心在静平台坐标系下的惯性张量
g——重力加速度
(2)从动杆:假设重力是唯一作用于从动杆的外力,在静平台坐标系下,从动杆的外力与惯性力分别是
(32)

式中OIi——静平台坐标系下从动杆的惯性张量
iIi——从动杆在自身局部坐标系Cxyz中的惯性张量
由图4可知,从动杆的局部坐标系可以认为先关于静平台的固定坐标系的z轴旋转φi角,再关于新得到的坐标系(x′i,y′i,z′i)的y′i轴进行φi角度旋转,得到新的局部坐标系。mi是从动杆的质量。这样可以得到2个坐标系的旋转关系
(33)

图4 局部坐标系表示原理图Fig.4 Schematic representation of local coordinate system
(3)滑块:由于滑块只有平移运动,外力和惯性力作用于从动杆相对于静平台Oxyz的中心处

(34)
式中mqi——从动杆的质量块
(4)电机上的作用力:作用在电机的外力与惯性力
(35)
式中IMi、ICi、ILi——电机、联轴器、滑块惯性力矩
τi——电机输入扭矩
电机与滑块之间的关系是
(36)
(37)
式中r——带轮半径
3.2 动力学模型
根据虚功原理,可以得到

(38)
其中
δd=[δdδd2δd3]T
(39)

(40)
式中Fi——作用在静平台坐标系的从动杆广义力
δdi、δθi——滑块和电机转子对应的虚位移
根据描述的连接雅可比矩阵式(23),可得到δxi和δxp的关系
(41)
根据式(17)的雅可比矩阵,可以得到δdi和δxp的关系
(42)
将式(40)~(42)代入式(38),简化得到
(43)

(44)
(45)
其中

(46)
IMCL=diag(IMCL1,IMCL2,IMCL3)
(47)
IMCLi=IMi+ICi+ILi
(48)
简化式(45),可以得到动力学方程的一般形式
(49)
其中
(50)

(51)

(52)

G(d)——重力项
(53)
设定机器人动平台中心按式(53)的圆锥曲线运动,利用Matlab将动力学方程程序化,进行仿真实验,仿真结果如图5所示。
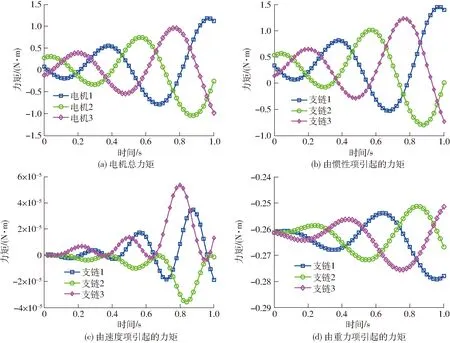
图5 动力学仿真结果Fig.5 Dynamic simulation results
由图5可知,速度项引起的力矩基本可以忽略,重力项引起的力矩的变化基本趋于恒定,各个伺服电机的力矩主要由惯性项所引起的力矩决定。
4 ADAMS与Matlab联合仿真
在Inventor中将机器人三维模型保存为(*.x_t)格式,然后将保存好的文件导入到ADAMS中,由于导入的模型的各部件的质量、材料属性以及各部件间的连接和约束都没有,所以需要完成以下几个步骤[16-20]:
(1)设置一下虚拟样机的环境:对虚拟模型的坐标系、重力方向、单位、工作网格进行设置。并且对模型的材料等固有特性进行设置。
(2)简化模型和修改特性:将一些不太影响结构的结构件删除,减小仿真的复杂度,将螺丝等固定件进行删除。
(3)给机构添加运动副:由于直线驱动型机器人包含3个平移副和12个球形副,通过工具箱进行添加。
通过以上3个步骤的设置,可以得到如图6所示ADAMS软件中的机器人模型。
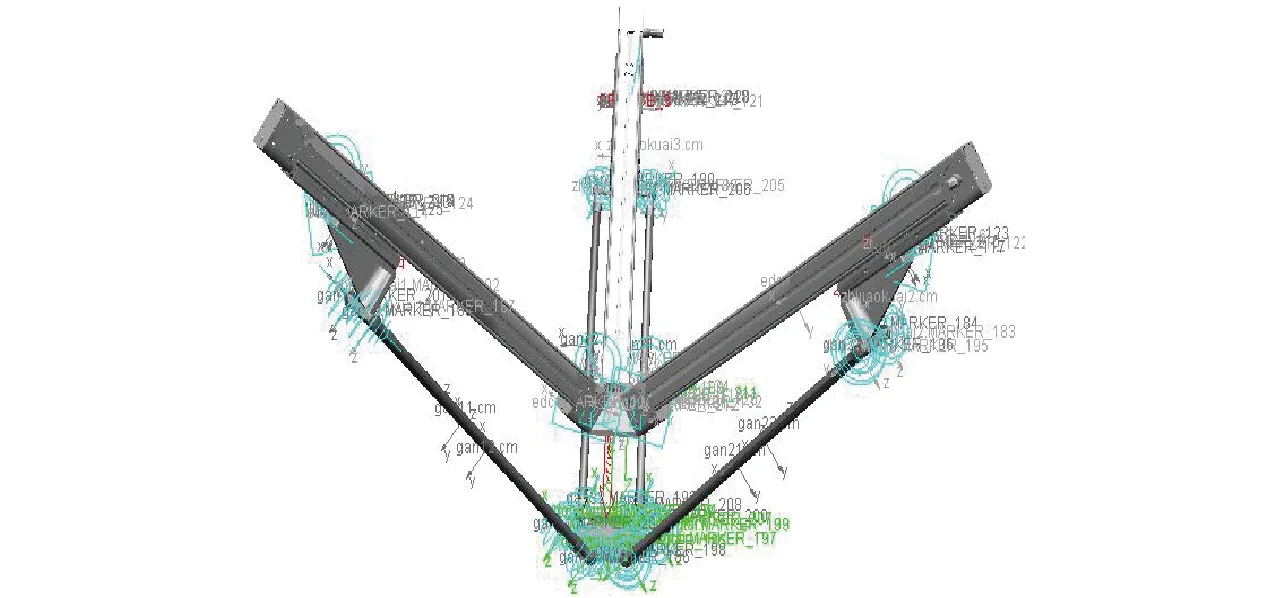
图6 ADAMS模型Fig.6 Simulation model of ADAMS
为了验证所建立的直线驱动型并联机器人动力学理论模型的正确性,通过Matlab与ADAMS的联合仿真来验证模型的正确性,如图7所示。在Matlab中,将并联机器人的运动学逆解、速度、加速度和动力学程序化,并编写为一个函数,函数所需参数有机器人结构参数和轨迹方程;在ADAMS中,除了前面已完成的步骤,还需输入机器人的轨迹方程。
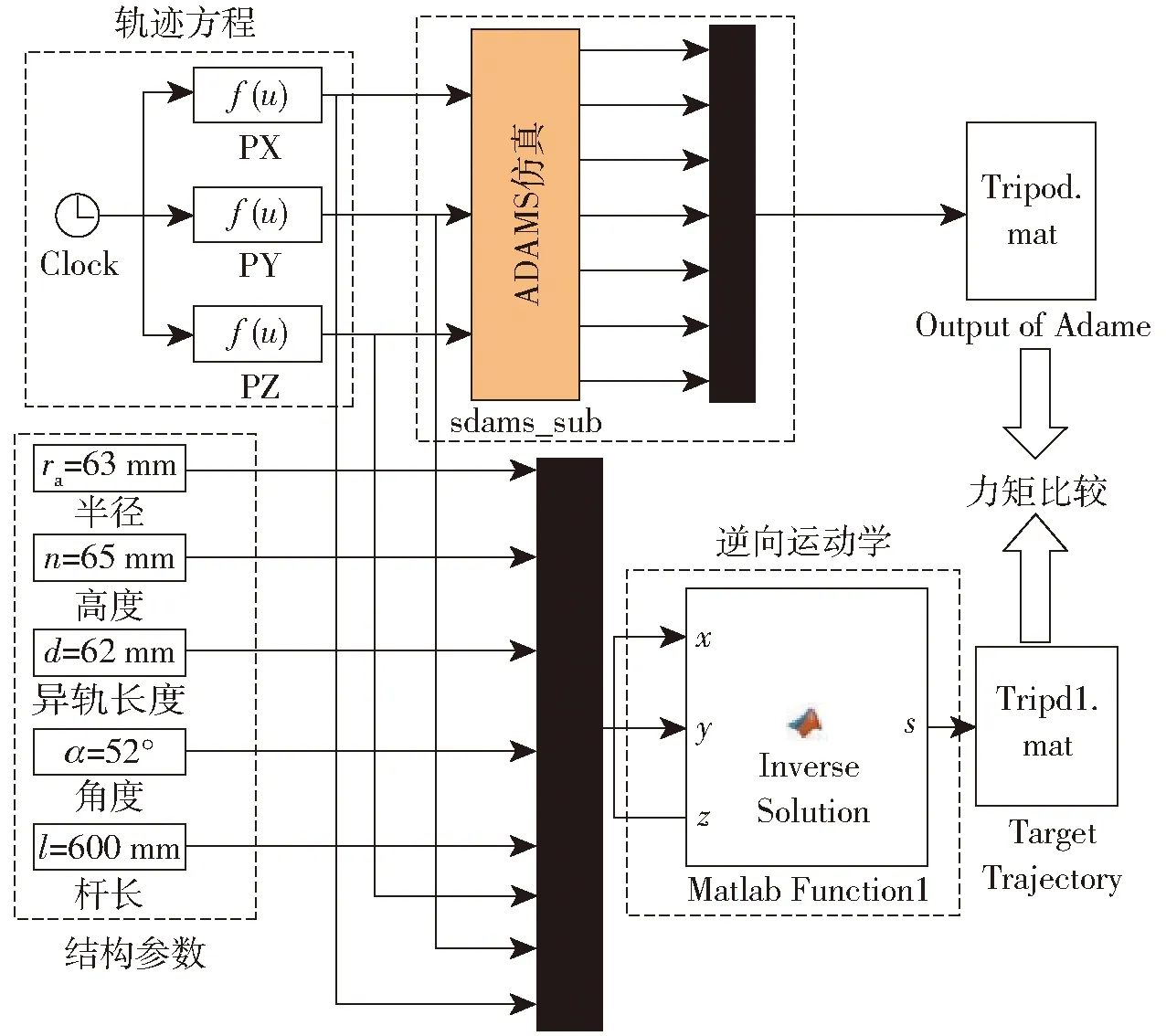
图7 Matlab与ADAMS联合仿真图Fig.7 Co-simulation diagram of Matlab and ADAMS
仿真前先设定好直线驱动型并联机器人的各项结构参数,如表1所示。
将式(53)给定的末端的螺旋曲线,作为末端动平台的轨迹方程,[x0,y0,z0]=[0,0,900 mm]是初始位置,由Matlab仿真得到伺服电机的驱动力矩,同时将末端轨迹作为ADAMS的输入量,通过仿真也得到伺服电机的驱动力矩,仿真结果如图8、9所示。

表1 直线驱动型并联机器人结构参数Tab.1 Structural parameters of linear drivenparallel robot
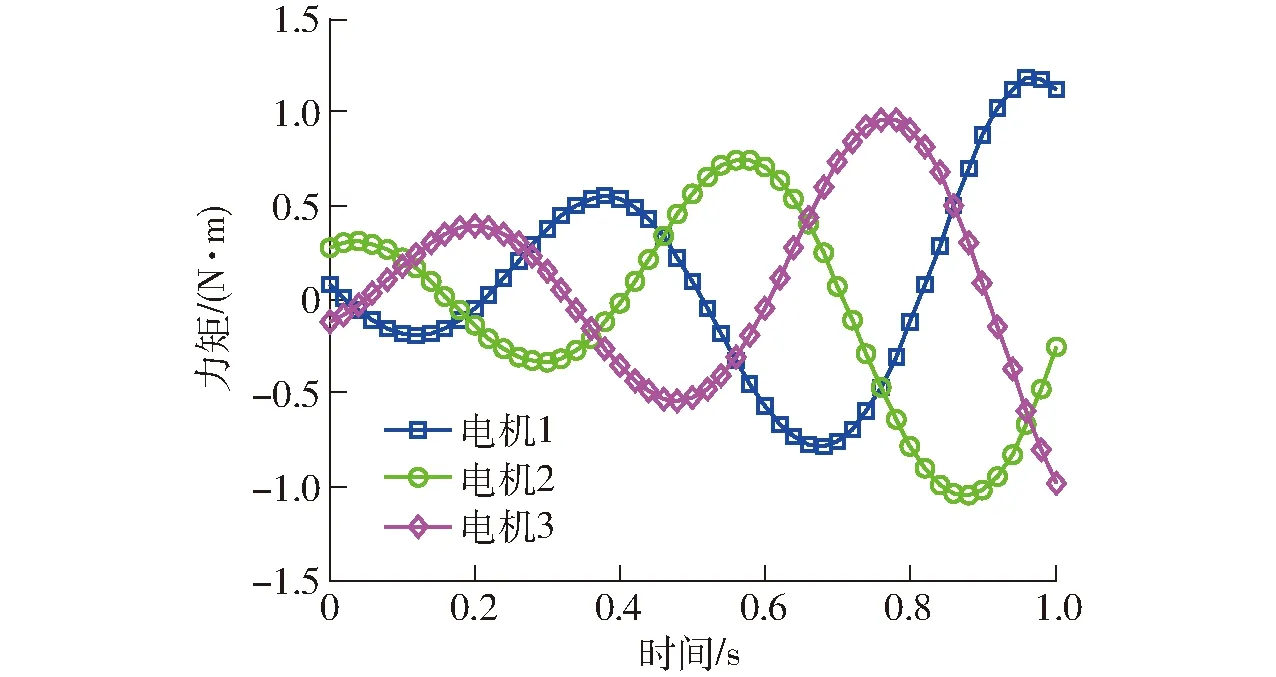
图8 Matlab力矩仿真Fig.8 Torque simulation diagram of Matlab
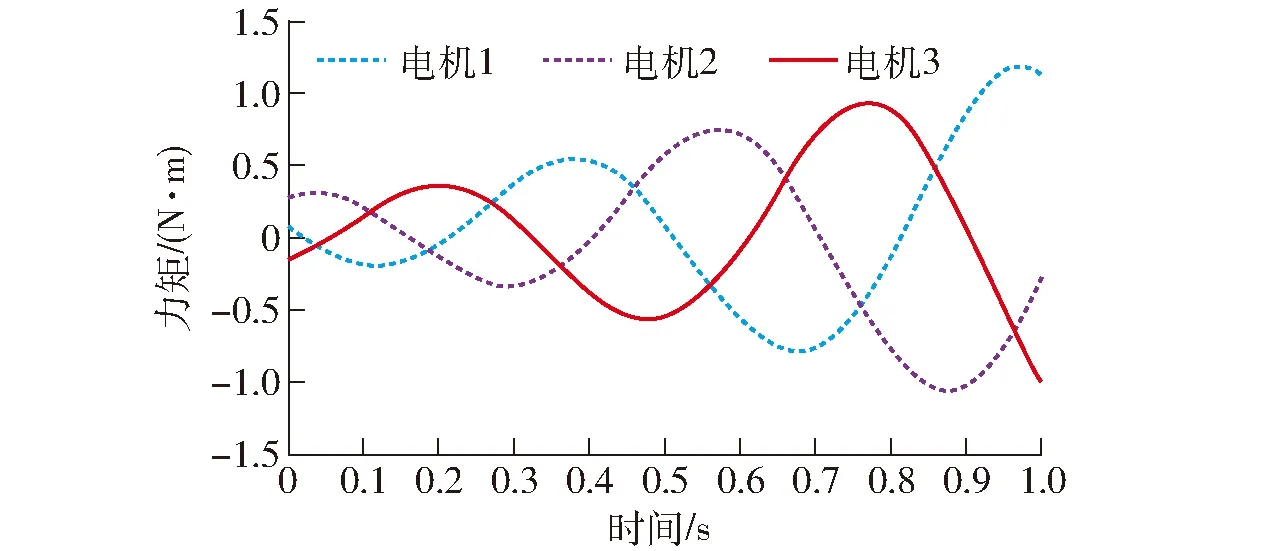
图9 ADAMS力矩仿真Fig.9 Torque simulation diagram of ADAMS
通过仿真结果对比,得知Matlab与ADAMS中的结果是一致的,并且驱动器力矩曲线是平滑的,说明直线驱动型并联机器人不仅具有良好的动力学性能,而且建立的动力学模型是正确的,也验证了运动学逆解、速度和加速度模型的正确性。
5 负载特性试验
为了进一步地验证直线驱动型并联机器人的动力学理论模型的正确性,进行机器人负载试验,让机器人负载0.1 kg的铝块(图10),在X和Y方向上沿着设定的轨迹进行运动,流程如图11所示,将轨迹函数输入到工控机,工控机将控制量输入到控制卡,控制卡将模拟量传给并联机器人的3个交流伺服电机并驱动动平台按给定的轨迹进行试验,期间可以采用采集卡从交流伺服电机的输出端口采集信号,观察3个电机转矩的曲线变化规律。

图10 0.1 kg负载Fig.10 Load of 0.1 kg
首先,测试机器人负载0.1 kg的铝块沿X方向运动下的伺服电机转矩,X=-100tcos(10t),初始位置为[x0,y0,z0]=[0,0,980 mm],将X轨迹函数和初始位置信息输入到工控机,控制卡获取工控机的控制量来控制伺服电机,测试结果如图12a所示。
然后采用同样方法来测试机器人在负载情况下Y方向上的伺服电机转矩,Y=-100tsin(10t),初始位置为[x0,y0,z0]=[0,0,980 mm],结果如图12b所示。
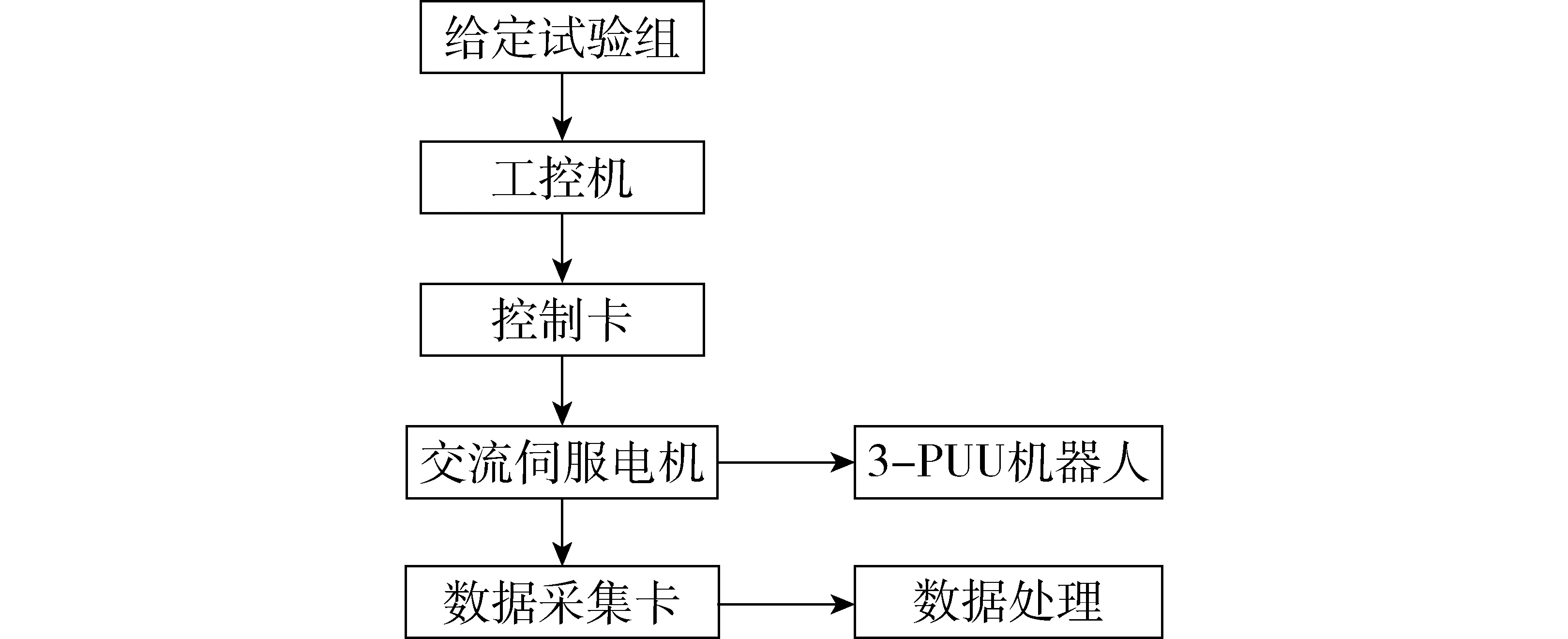
图11 硬件流程方案Fig.11 Hardware flow plan

图12 力矩试验值Fig.12 Torque test values
图13分别为机器人在负载情况下沿X方向和Y方向下的电机理论力矩图,图13a中,电机2和电机3的力矩曲线基本重合,是与电机在机器人坐标下的布局有密切联系的,X轴刚好是电机2和电机3连线的垂直平分线,所以机器人沿X方向运动时,电机2和电机3对应下的滑块的运动特性一致,电机2和电机3的力矩曲线基本重合。

图13 力矩理论值Fig.13 Torque theoretical values
通过分别比较机器人在X和Y方向上的理论计算力矩曲线和试验测试力矩曲线,二者力矩曲线不完全吻合,可能由于控制系统软硬件、机器人零部件参数误差和曲线拟合误差等因素导致二者数值在局部有较大差别,且在部分运动段曲线吻合不理想,但是二者力矩曲线整体变化趋势一致,验证了本文采用虚功原理建立的动力学模型是正确的。
6 结论
(1)根据直线驱动型并联机器人的几何结构模型,利用矢量法进行了运动学分析,并得出机器人运动学逆解、速度和加速度模型。
(2)利用虚功原理建立动力学模型,分析了机器人机械系统中各个运动部件在虚位移下对应的广义力,推导出动力学方程,运用Matlab将其运动学逆解、速度、加速度和动力学模型程序化,给定动平台末端一个轨迹,进行仿真得到机器人上各个电机的力矩由所对应支链上各个运动部件的惯性项所引起的力矩决定,而速度项所引起的力矩完全可以忽略,重力项所引起的力矩基本上趋于恒定。
(3)通过Matlab与ADAMS联合仿真试验和负载特性试验,验证了动力学理论模型的正确性,为直线驱动型并联机器人的物理样机的设计、优化运动控制提供依据,也为同类少自由度并联机器人的动力学研究提供了一定的参考价值。
1 WANG Xiaoyun, MILLS J K.Dynamic modeling of a flexible-link planar parallel platform using a substructuring approach[J].Mechanism and Machine Theory,2006,41:671-687.
2 PIERROT F, NABAT V, COMPANY O, et al. Optimal design of a 4-DOF parallel manipulator: from academia to industry[J]. IEEE Transactions on Robotics, 2009, 25(2): 213-224.
3 杨继东,万彪刚,高俊东,等. Tripod并联机器人运动学分析与样机实验[J/OL]. 农业机械学报, 2016, 47(10):390-397. http:∥www.j-csam.org/jcsam/ch/reader/view_abstract.aspx?flag=1&file_no=20161051&journal_id=jcsam.DOI:10.6041/j.issn.1000-1298.2016.10.051.
YANG Jidong,WAN Biaogang,GAO Jundong,et al. Kinematic analysis and expeiment of Tripod parallel robot[J/OL]. Transactions of the Chinese Society for Agricultural Machinery,2016,47(10):390-397. (in Chinese)
4 BENAMAR F,BIDAUD P,MENN F. Generic differential kinematic modeling of articulated mobile robots[J].Mechanism and Machine Theory,2010,45(7):997-1012.
5 LI X J,WANG J S,PRITSCHOW G. Performance atlases and optimum design of planar 5R symmetrical parallel mechanisms[J]. Mechanism and Machine Theory,2006,41(2):119-144.
6 HUANG T,LI M,ZHAN X Y,et al. Kinematic design of a reconfigurable miniature parallel kinematic machine[J]. Chinese Journal of Mechanical Engineering,2003,16(1):79-82.
7 冯李航,张为公,龚宗洋.Delta系列并联机器人研究进展与现状[J].机器人,2014,36(3):375-384.
FENG Lihang,ZHANG Weigong,GONG Zongyang. Developments of Delta-like parallel manipulator sarevie[J].Robot,2014,36(3):375-384.(in Chinese)
8 ROMDHANE L. Design and analysis of a hybrid serial-parallelmanipulator[J]. Mechanism and Machine Theory, 1999, 34(7):1037-1055.
9 席万强, 陈柏, 丁力,等. 考虑非线性摩擦模型的机器人动力学参数辨识[J/OL]. 农业机械学报, 2017,48(2):393-399. http:∥www.j-csam.org/jcsam/ch/reader/view_abstract.aspx?flag=1&file_no=20170253&journal_id=jcsam.DOI:10.6041/j.issn.1000-1298.2017.02.053.
XI Wanqiang, CHEN Bai,DING Li,et al. Dynamic parameter identification for robot manipulators with nonlinear friction model[J/OL]. Transactions of the Chinese Society for Agricultural Machinery,2017,48(2):393-399.(in Chinese)
10 ZENEBE K Z. Formulation of a generalized Jacobian and inverseacceleration analysis of a linear Delta manipulator based on reciprocal screws method[J]. International Journal of Engineering Research and Technology, 2013, 2(2): 1-9.
11 PIERROT F, BENOIT M, DAUCHEZ P, et al. High speed control of a parallel robot[C]∥IEEE International Workshop on Intelligent Robots and Systems,1990: 949-954.
12 BOURI M, CLAVEL R. The linear Delta: developments and applications[C]∥The 41st International Symposium on Robotics, 2010: 1198-1205
13 NABAT V, de la O RODRIGUEZ M, COMPANY O, et al. Par4: very highspeed parallel robot for pick-and-place[C]∥IEEE International Conference on Intelligent Robots and Systems,2005: 553-558.
14 CODOUREY A. Dynamic modeling of parallel robots forcomputed-torque control implementation[J]. International Journal of Robotics Research, 1998, 17(12): 1325-1336
15 HUANG T, LI M, LI Z X, et al. Optimal kinematic design of 2-DOF parallel manipulators with well-shaped workspace bounded by a specified conditioning index[J]. IEEE Transactions on Robotics and Automation, 2004, 20(3): 538-543.
16 张彦斌, 张树乾,吴鑫.3-CRPa移动联机构运动学分析与仿真[J/OL].农业机械学报,2012,43(7):200-205. http:∥www.j-csam.org/jcsam/ch/reader/view_abstract.aspx?flag=1&file_no=20120737&journal_id=jcsam.DOI:10.6041/j.issn.1000-1298.2012.07.037.
ZHANG Yanbin,ZHANG Shuqian,WU Xin. Kinematic analysis and simulation of 3-CRPa translational parallel mechanism [J/OL]. Transactions of the Chinese Society for Agricultural Machinery,2012,43(7):200-205.(in Chinese)
17 牛雪梅,高国琴,刘辛军,等. 三自由度驱动冗余并联机构动力学建模与试验[J/OL]. 农业工程学报,2013,29(16):31-41. http:∥www.tcsae.org/nygcxb/ch/reader/view_abstract.aspx?flag=1&file_no=20131605&journal_id=nygcxb.DOI:10.3969/j.issn.1002-6819.2013.16.005.
NIU Xuemei,GAO Guoqin,LIU Xinjun,et al. Dynamics modeling and experiments of 3-DOF parallel mechanism with actuation redundancy[J/OL]. Transactions of the CSAE,2013,29(16):31-41. (in Chinese)
18 崔国华,周海栋,王南,等. 基于Isight的3-UPS-S并联机器人机构多目标优化[J/OL].农业机械学报,2013,44(9):261-266. http:∥www.j-csam.org/jcsam/ch/reader/view_abstract.aspx?flag=1&file_no=20130945&journal_id=jcsam.DOI:10.6041/j.issn.1000-1298.2013.09.045.
CUI Guohua, ZHOU Haidong, WANG Nan, et al. Multi-objective optimization of 3-UPS-S parallel mechanism based on Isight[J/OL]. Transactions of the Chinese Society for Agricultural Machinery,2013,44(9):261-266.(in Chinese)
19 梅江平,高奔,谭杨,等.3-SPR并联机构运动学分析[J/OL].农业机械学报,2012,43(8):215-220. http:∥www.j-csam.org/jcsam/ch/reader/view_abstract.aspx?flag=1&file_no=20120839&journal_id=jcsam.DOI:10.6041/j.issn.1000-1298.2012.08.039.
MEI Jiangping, GAO Ben, TAN Yang, et al. Kinematic analysis of 3-SPR parallel mechanism[J/OL]. Transactions of the Chinese Society for Agricultural Machinery,2012,43(8):215-220.(in Chinese)
20 张清华,张宪民.平面3-RRR柔性并联机器人残余振动主动控制[J/OL].农业机械学报,2013,44(2):232-237,266. http:∥www.j-csam.org/jcsam/ch/reader/view_abstract.aspx?flag=1&file_no=20130242&journal_id=jcsam.DOI:10.6041/j.issn.1000-1298.2013.02.042.
ZHANG Qinhua, ZHANG Xianmin. Active residual vibration control of planar 3-RRR flexible parallel robots[J/OL].Transactions of the Chinese Society for Agricultural Machinery,2013,44(2),232-237, 266. (in Chinese)
猜你喜欢
中国特种设备安全(2022年2期)2022-07-08
中学生数理化·中考版(2021年10期)2021-11-22
电子制作(2019年23期)2019-02-23
消费导刊(2018年8期)2018-05-25
山东青年(2016年12期)2017-03-02
婚姻与家庭·性情读本(2017年1期)2017-02-16
航天制造技术(2016年6期)2016-05-09
燕山大学学报(2015年4期)2015-12-25
探测与控制学报(2015年4期)2015-12-15
中国塑料(2015年9期)2015-10-14
