
基于STM32的一种步进电机系统的设计
2018-01-18 07:11刘成淦王直
电子设计工程 2018年1期
刘成淦,王直
(江苏科技大学计算机科学与工程学院,江苏镇江212003)
步进电机广泛的应用于国民经济中,它具有机构简单、控制方面等优点,即使是应用在开环的系统中仍然能够具有较高的准确率。步进电机接收到一个脉冲可以转1.2度,通常通过控制脉冲数来实现步进电机的转动步数,通过控制输入的脉冲频率实现对步进电机的转动速度和加速度的控制。理论上输入的脉冲频率越高步进电机的转动速度越快,反之,步进电机的速度越慢。但是在实际的应用中输入的频率过大或者过小会造成电机的失步和堵步,所以要充分考虑步进电机的运动频率才能实现其运动的准确定位。在步进电机控制系统中可以通过输入PWM波的方法来对步进电动的运动进行控制。PWM波的产生可以通过时钟频率、自动重装值等参数进行设置,从而调节PWM波的占空比和输出频率。通过CAN通信来接收上位机发送的运动控制命令,主控制器判断接收到的信息输出相应的运动速度、运动方向。本文中主控制芯片选用STM32系列的芯片,通过设置芯片内部的定时器输出相应的PWM波。通过调节PWM波的频率使电机呈现S型运动轨迹,这种运动轨迹有利于提高步进电机运动的准确性,同时也能够在一定程度上降低整个系统的功耗。系统中加入了电流调节电路实现对噪声的调节,大大的提高了系统的稳定性。国内通常对步进电机控制系统的研究主要集中在硬件电路设计、软件设计方面,而对步进电机的运动控制却很少涉及,电机能否按照预定的轨迹准确运动决定着系统能否达到期望的控制效果,因此对电机的准确控制对机械臂系统具有重要的意义。本论文主要针对步进电机运动过程中的噪声过大、准确性不足、效率低下进行改进。
1 系统的硬件构成
步进电机是一种将电脉冲信号转变为角位移或线位移且受数字信号控制的开环控制元件。电机的转动速度、启动和停止与输入的脉冲信号频率和脉冲数有关,与负载的变化无关。通常在一定范围内输入的脉冲频率越快,其转速越快。步进电机的加速和减速可以由输入的频率进行控制,位移和相位的变化受输入的脉冲数影响。在实际的应用过程中如果要实现准确的位移控制,需要严格的把控输入的脉冲个数。
步进电机在没有超载的情况下,电机的运动速度和其停止的位置都是由输入的脉冲频率和脉冲数量决定的。通常,当向步进电机输入一个脉冲信号,它将驱动步进电机按照预先设定的方向转动一个固定的角度,这个角度成为“步矩角”。在使用步进电机的过程中,通过设定输入的脉冲数量设置电机的运行位移,从而能够准确的控制电机的运动行程。
步进电机从其结构上可以分为反应式、永磁式、和混合式。反应式步进电机的定子由绕组和转子组成,且其绕组和转子都是由软磁材料制作而成。反应式步进电机的结构简单、制作成本低、步矩角可以达到1.2度,但是在使用过程中发热过大、可靠性较差。永磁式步进电机的转子是由永磁材料制成,它的力矩较大,有较好的输出动能,但是它的步矩角度一般为7.5度,导致了其控制精度较差。混合式步进电机的转子也采用了永磁材料,输出的的力矩较大,同时它的步矩角较小,在使用的过程中能够对电机的运行轨迹进行精确控制。目前,工业上普遍采用两相式步进电机,其性价比较高。它的步矩角为1.8度,如果和步进电机驱动器结合使用,可使步矩角达到0.007度,大大的提高了步进电机的运行精度。在实际的使用过程中,由于制造工艺水平和摩擦产热等原因,实际的工作精度略低于理论值。
文中所论述和设计的抓取机械臂应用在血凝分析仪中,主要负责对进样盘的抓取和位移。该机械臂共有4个自由度,采用步进电机作为其动力来源,具有较高的自动化程度。机械臂系统采用模块化设计方式,模块通过总线方式来实现与其他模块之间的通信,能够根据要求准确的运行,可实现对样本盘的自动抓取,自动移动,自动放置至指定地点。该系统具有通用性,软件的移植方便,同时在后期的维护和升级方面具有较大的优势。系统采用了CAN通信与上位机进行数据的传输,节省了整个系统的空间。系统中采用步进电机作为机械臂的动力源,大大降低了系统的成。本系统与现有的机械臂系统相比具有生产成本低、准确度高、噪声较小、装置简单、操作方便、抗干扰能力强等优点,易于产品的推广。本系统中的步进电机控制芯片采用的是STM32F103CBT6,步进电机的驱动芯片采用的是THB6128。系统中采用的是现在比较普遍使用的两相四线混合式步进电机,其基本的步矩角为1.8度/步。
步进电机的驱动方法一般采用专用的集成步进驱动芯片实现,控制器通过输出脉冲的数量和频率结合步进电机驱动器的细分功能,进而达到对步进电机的位移和速度的控制。图1是一种基于STM32的步进电机控制系统(M0、M1、M2位细分,DIR为方向),该系统中步进电机驱动芯片采用的是THB6128。在该系统中向THB6128输出的信号主要有PWM波、细分调节、电机运动方向。STM32根据判断收到的上位机信息对步进电机执行相应的操作,电机控制系统的工作流程如图2所示。通过步进电动的驱动芯片,单片机输出的脉冲信号就转变为步进电机的角位移。步进电机在一个脉冲下运动的角度可以通过细分进行调节,细分细说设置的越大电机在一个脉冲的驱动下运动的角度越小。电机的一个完整的运动过程需要经过低速启动、快速加速到目标速度、在目标速度下保持运动、匀减速等过程才能使步进电机平稳运动而且可以尽可能的节省运动的时间。在这个一系列的运动过程中最重要的是如何解决步进电机的加减速问题使步进电机的运动轨迹呈现S型曲线。
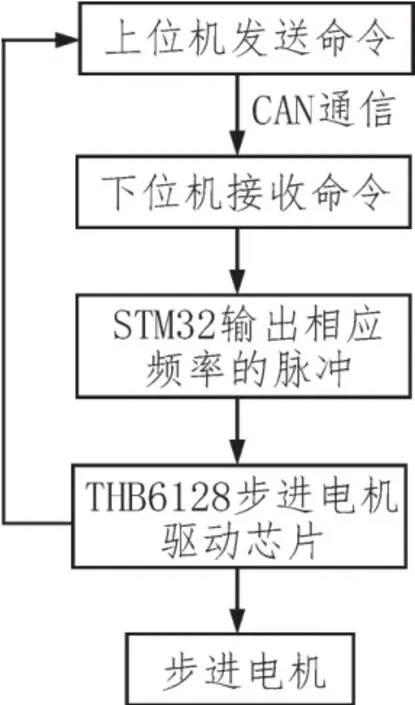
图1 步进电机控制系统工作流程

图2 步进电机控制系统
文中设计的步进电机控制器采用STM32F103CBT6,驱动器采用步进电机驱动芯片THB6128,这个驱动器可以耐压高达36 V直流电压,峰值电流2.2 A,工作电流1.5 A,支持多种细分方式(1、1/2、1/4、1/8、1/16、1/32、1/64、1/128),通过 M1、M2、M3改变细分。使能端设置:ENABLE输入端为低电平时,输出为高阻状态。但是,内部逻辑电路没有停止工作,如果有脉冲信号的输入,励磁仍在进行。因此,将ENABLE重新置为高电平时,由于CLK信号还在输入,电机继续工作。电机正反转控制端:CW/CCW为Low时,电机正转,CW/CCW为High时,电机反转。
步进电机S型曲线运动的特点是步进电机起始速度较小,在中途可以以较快的时间加速到期望的速度,在加速到期望的速度后可以以期望的速度保持匀速运动。整个过程不会出现电机过冲的现象,提高了系统的稳定性。由于电机能够在最短的时间内加速到期望的速度,从而降低了系统的功耗。
在系统中由于步进电机的启动速度和运行速度设置的不太合理,通常会造成步进电机的堵转和噪声。在系统中可以通过硬件电路对步进电机的噪声进行处理,在系统中通过调节滑动电阻器对步进电机的噪声进行调节。
2 曲线算法的理论实现
步进电机的启动过程主要体现在定时器中断及中断服务函数上,PWM输出主要通过定时器中断来完成,定时器中断输出PWM主要分为两块,首先定时器中断初始化,配置相应时钟,定义IO,设定优先级,其后在定时器中断服务函数设置加速过程,既不断的改变PWM输出频率。定时器中断服务函数是本处的重点,加减速的过程实则是通过在定时中断服务函数每个相应的时间改变PWM的输出频率呈现一个相对线性的过程,最终达到一个稳定值,其中启动的初始频率不一定为零,电机根据不同的负载启动的频率是不同的,主函数中通过使能相应PWM定时器的时钟,配置细分,方向,以及打开启动芯片使能端即可对电机实现控制。
在步进电机运动的过程中,在其启动的过程中由于静态惯量比较大需要,因此需要较小的加速度,否则步进电机在启动的过程中易造成堵转现象。在步进电机的停止阶段是,其输出的转矩会大大地降低,如果此时的加速度过大往往会产生步进电机的过冲现象。综合考虑各个方面,为了保证步进电机的准确启动、稳定运行和准确停止,需要采用对步进电机的运行速度采取曲线控制方法。
S型曲线是目前比较新的运动控制方法,它是由步进电机的速度轨迹呈现出S型曲线得出来的。该模型能够满足大多数情况下步进电机的工作状态,在使用S型曲线对步进电机运动控制中,步进电机依次经历的阶段为加加速阶段、快速加速阶段、减加速阶段、匀速运动阶段、减减速阶段。采用S型常用的S型运动曲线的数学模型为:

曲线的特点是开始阶段步进电机的加速度缓慢的增加,在加速度增加到一定的范围后加速度快速的增大。在加速度达到一定的范围后加速度再次缓慢的增加,最后速度趋于稳定,并保持该速度进行匀速运动。曲线的减速过程可以看作加速过程的逆过程。在实际的应用过程中该函数模型能够有效的的实现步进电机在运动控制中的准确性,但是在运动轨迹较短的环境下容易造成步进电机的失步和堵转现象,增大了系统的不稳定性。为了能在实际的工业控制中使多个步进电机能快速的定位,有很高的精确度,速度也能平滑过渡,加速度不产生突变,先提出一种改进型S型曲线,其数学方程式为:
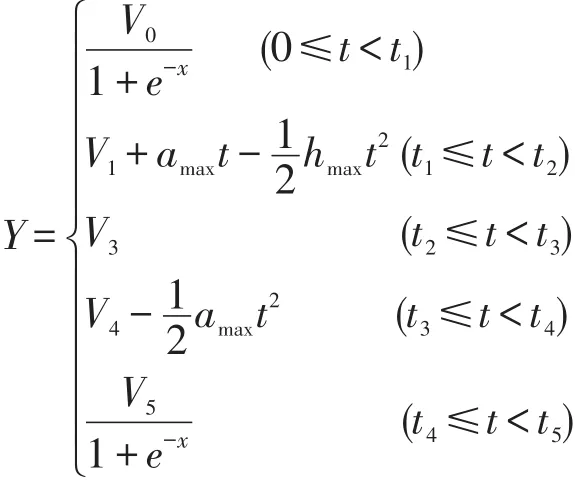
其中amax表示的是加速阶段的最大的速度,hmax表示的是最大变加速度。
其速度的曲线图形如图3所示步进电机S型曲线运动的特点是步进电机起始速度较小,在中途可以以较快的时间加速到期望的速度,在加速到期望的速度后可以以期望的速度保持匀速运动。整个过程不会出现电机过冲的现象,提高了系统的稳定性。由于电机能够在最短的时间内加速到期望的速度,从而降低了系统的功耗。
步进电机S型曲线运动的特点是步进电机起始速度较小,在中途可以以较快的时间加速到期望的速度,在加速到期望的速度后可以以期望的速度保持匀速运动。整个过程不会出现电机过冲的现象,提高了系统的稳定性。

图3 步进电机速度曲线
3 算法的实现
步进电机的加减速过程是由起始频率和变化频率组成的,通过计算式获得加速度的数据,从而为STM32的控制提供理论依据。通常情况下STM32对步进电机速度的控制不是实时的调用公式进行计算,而是把事先计算好的数据存储到其的内存中,通过其内部的定时器在一定的时间内进行触发,从而得到输出的频率。
STM32中最高频率为72 MHz,若采用72 MHz此时的PWM波的频率约为1.1 kHz,此时步进电机难以启动,为了解决这个问题需要对定时器的时间进行分频处理。对定时器的分频时间进行处理时分频系数的选择要慎重考虑,必须考虑到定时的精度问题也要考虑到电机运动过程中加速和减速对输出的频率的要求。在实际的系统的应用中如果选择的分频系数较小,此时系统的精度较高,但是满足不了系统对低频的需求。
在本系统中采用的解决方案是在低频的时候选取较大的分频系数,在高频的时候降低分频的系数。具体的操作方法是在低频系统运行时采用的分频系数为72,即低频的频率能够达到15 kHz;当STM32的输出频率上升到200 kHz时将分频系数变为1。
共振问题是影响系统性能的一个重要因素,如果系统中的共振往往会造成系统的噪声过大,会对系统的寿命造成影响,同时也会影响步进电机的准确性。因此共振问题必须引起重视。在本系统中可以通过调节THB6128驱动的细分参数来对系统的噪声进行处理。以三相步进电机[18-19]为例,假如电机的额定电流为3 A,在没有使用细分的情况下,在驱动器每接收到一个脉冲步进电机的电流就从0 A瞬间增加至3 A。电流的巨大变化无可避免的会带来电机运动时的振动和噪声。在THB6128驱动芯片有3个设置细分系数的I/O口,假设将细分系数设置为10时,步进电机没接收到一个脉冲其电流从0 A变化为0.3 A,这样大大的降低了步进电机在运动过程中的振动和噪声。采用细分调节并不会降低步矩力,相反步矩力还会增加。
4 结束语
本文设计的步进电机控制系统已经成功的应用于所在的研究项目中,该系统在步进电机的加加速运动过程中采用的S型曲线使电机在启动、加速和停止时都具有良好的平稳性。在本系统中通过调节定时器的分频系数能够较好的解决系统在高频和低频下的准确性。通过采用不同的细分能够在一定程度上降低了系统的振动和噪声,最大化的提高了系统的性能。
[1]杨乾.基于AVR的多功能室内空气净化器设计[D].合肥:合肥工业大学,2015.
[2]唐雄民,朱燕飞.三相恒频PWM整流器的直接功率控制研究[J].电气传动,2011,41(11):32-37.
[3]李成祥.智能型室内空气质量检测与控制系统[D].北京:北京交通大学,2011.
[4]孙书鹰.新一代嵌入式微处理器STM32F103开发与应用[J].微计算机应用,2011,31(12):2-4.
[5]鲍爱达.基于FPGA和SHT21传感器的温湿度测量系统的设计[J].计算机测量与控制,2012,20(11):1-3.
[6]陈银溢.基于CC2541和LIS3DSH的计步器设计[J].机械工程与自动,2014,6(187):1-3.
[7]王月.基于单片机直接驱动段式LCD的驱动模块设计[J].研究与设计,2012,28(4):2-4.
[8]林凡强.笔段式LCD驱动设计[J].液晶与显示,2012,27(4):2-3.
[9]刘举庆,刘莲秋.遥控编解码电路的新应用[J].信息技术,2011(11):46-49.
[10]原有进.兰州重离子加速器冷却储存环束流累积研究[J].原子核物理评论,2001,18(1):39-42.
[11]郭威娜,邓红.双步进电机同轴联接及驱动装置的设计[J].微计算机信息,2012(4):103-104.
[12]魏云冰,黄进,牛发亮,等.基于小波脊线的笼型异步电动机转子故障特征提取[J].电工技术学报,2013,18(4):123-127.
[13]张瑞祥,赵军红.小波包在异步电机转子断条故障检测中的应用[J].自动测量与控制,2013,25(9):68-69.
[14]周黎,杨世洪,高晓东.步进电机控制系统建模及运行曲线仿真[J].电机与控制学报,2011,15(1):20-25.
[15]程军圣,于德介,杨宇,等.基于E M D的齿轮故障识别研究[J].电子与信息学报,2004,26(5):825-829.
[16]刘振兴,尹项根.基于Hibert模量频谱分析的异步电动机转子故障在线监测与诊断方法[J].中国电机工程学报,2003,23(7):158-161.
[17]孙标.基于ARM和吸光度法的糖化血红蛋白分析仪的设计[D].镇江:江苏科技大学,2015.
[18]白玉,刘冰,李智.基于Cortex-M3处理器的步进电机控制系统[J].电子科技,2014,27(10):43.
[19]万侃然,汪婷,邵淦.基于ATMEGA128的气密性检测仪设计与实现[J].电子科技,2015,28(1):81.
猜你喜欢
数学物理学报(2022年3期)2022-05-25
防爆电机(2021年3期)2021-07-21
防爆电机(2021年1期)2021-03-29
电机与控制应用(2021年12期)2021-02-28
华人时刊(2020年23期)2020-04-13
数学物理学报(2019年5期)2019-11-29
中成药(2017年12期)2018-01-19
能源(2016年2期)2016-12-01
专用汽车(2016年9期)2016-03-01
专用汽车(2015年2期)2015-03-01
