
多工况下电动汽车电机优化控制研究
2018-01-18 07:11朱骏驰李文超陆颖
电子设计工程 2018年1期
朱骏驰,李文超,陆颖
(江苏大学汽车与交通工程学院,江苏镇江212013)
随着汽车工业不断的发展,其造成的能源紧缺和环境污染变成了突出的社会问题。石油作为汽车的主要动力燃料,是一种不可再生能源,而随着汽车数量的增长,石油资源却日益匮乏,它的耗竭只是一个时间问题。而环保问题如今也逐渐成了社会热点问题,汽车尾气的排放造成了环境的恶化,比如温室效应和雾霾。为了解决这些问题,电动汽车已经成为未来汽车的发展趋势,各个国家与企业争相投入到研发电动汽车上来,其市场正变得越来越广阔。永磁无刷直流电机因为其效率高、质量可靠、外特性好、调速性好等优点,越来越受到青睐[1-2]。
电动汽车在实际运行情况中会有较大的负载波动,而传统PID控制在在线调整和控制转矩转速方面都难满足其要求[3-4]。智能PID控制可靠性高,能够在线实时调整,有比较好的适应性和鲁棒性[5]。对于电动汽车控制,针对常规PID反应较慢现象,本文提出了一种基于粒子群算法优化后的模糊PID的控制方法,仿真表明优化的控制系统能实现在线控制,并具备自适应和自学习能力,控制效果明显优于常规PID控制[6-7]。
1 数学模型
在此为方便分析,不考虑磁饱和状态,忽略枢绕组中的互感,忽略电枢反应和换相过程中的影响,忽略磁滞损耗。假设电机的三相绕组对称,电机气隙磁导为均匀分布[8]。
1.1 电机数学模型
由于BLDC三相完全对称,三相定子绕组自感和电阻相等,三相定子绕组间互感等于M,Mib+Mic=-Mia,Ia+Ib+Ic=0[9]。BLDCM三相定子电压的平衡方程为:

式中:U为三相定子绕组相电压;e为三相绕组定子反电动势;i为三相定子绕组相电流;R为三相定子绕组电阻;p为微分算子[10]。
电机的运动方程为:

电机的电磁转矩方程为:

根据电机的电压方程[11],可以将其等效地表示为等效电路如图1所示。

图1 BLDC等效电路
1.2 电动汽车数学模型
汽车行驶时收到行驶阻力、空气阻力、加速阻力和坡度阻力[12]。
所以汽车行驶的数学模型为:

其中滚动阻力为Ff=fmgcosα;空气阻力为;爬坡阻力为F=mgsinα;加速阻力为i
汽车车速与转速的关系为:

转矩方程为:

电机负载转矩为

2 智能PID控制
电动汽车的行驶工况较为复杂,特别是在城市里,电动汽车的速度更是需要频繁地调节。此时传统的PID控制就达不到理想的效果了[13]。
2.1 模糊控制
模糊控制器是一种基于模糊语言变量、模糊集合论及模糊逻辑推理的智能控制。最先是由美国教授Zadeh提出,在一些非线性控制模型中运用十分广泛。模糊控制能够直接运用语言型控制规则,不用建立精确的数学模型,以现场的运行经验作为指导,就能对系统进行实时控制[14]。
模糊控制系统是由模糊控制器和被控对象两部分组成。而其中模糊控制器是模糊控制系统中最为关键的部分,主要由模糊化、知识库、模糊推理和去模糊化4个部分组成。模糊控制器以控制规则为中心,把输入的确定值进行模糊化处理并与控制规则匹配,使确定值能够对应到模糊控制的语言变量的论域之中;而从知识库模糊推理出来的结果也同样要对应到输出语言变量的论域中。最后再进行去模糊化的工作,从而实现对系统的控制。模糊控制器的结构如图2所示[15]。

图2 模糊控制器结构图
但是模糊控制也存在一些问题,模糊规则主要根据专家的经验进行选取,具有一定的主观性。所以在这里使用粒子群算法对模糊控制进行优化,从而达到理想的效果。
2.2 粒子群算法优化
粒子群优化算法(PSO)是最早由Kenedy教授根据鸟群觅食启发而提出的一种有效的全局寻优算法。算法由粒子间的协作竞争和信息交流,不断比较从而得到最优解。群体中每一个粒子的位置Xi都代表粒子群优化问题的一个备选的解,粒子在空间中飞行,这个飞行的方向和速率是根据其自身和其同伴的经验来不断调整的。所有的粒子都有一个适应度,考虑到自己当前的位置Xi和当前个体极值Pi,以及整个群体中全局极值Pg,并追随最优粒子在空间中进行搜索[16-17]。
粒子群优化算法实现的过程是:先选择待优化参数,然后初始化粒子群及参数设置,建立适应度函数,粒子群更新。算法流程如图3所示。
这里采用绝对误差的矩积分(ITAE)作为评价的性能指标,公式如下:

图3 粒子群算法流程图

其中J表示计算的步距,t表示计算的点数,适应度函数采用绝对误差矩积分,通过粒子群算法自动调整控制器的Kp,Ki,Kd。算法中适应度函数越大则表示个体位置越好,所以适应度函数值选择性能指标函数的倒数,公式如下:

然后逐渐增大适应度函数,从而不断调整加权因子的值,最终求出最佳的加权因子。通过粒子群算法优化参数,可以自动生成最优的隶属度函数和模糊控制规则。然后将通过粒子算法优化后的隶属度函数和模糊规则用于模糊控制器,其中推理方法采用Mamdani法,清晰化使用面积中心法。优化的模糊控制器结构如图4所示。

图4 粒子群算法优化的模糊控制器结构图
3 仿真模型构建
无刷直流电机控制系统的仿真模型是基于Simulink来构建的。根据公式(1)、(2)、(3)、(4)和电机基本原理可以搭建出各个模块,如:本体模块、电流滞环控制模块、速度控制模块、转矩计算模块、转速计算模块等。
仿真中速度控制模块采用的是基于粒子群算法优化后的模糊PID控制。输入的是电机参考转速和实际转速的差值,输出的是参考电流值。
由公式(5)、(6)、(7)、(8)可以建立起电动汽车数学模型。输入为车速,通过建模计算出电动汽车汽车行驶阻力、空气阻力、加速阻力和坡度阻力,最后输出转矩。
4 仿真与结果
文中通过Simulink建立了永磁无刷直流电机控制系统的仿真模型。其中仿真模型的各参数设置为:电机模型参数为额定电压U=220 V,额定转速n设置为1 000 r/min,每相的定子绕组电阻R=0.75 Ω,极对数为1,互感M=0.08 mH,每相的定子绕组电感L=0.33 mH,转子的转动惯量J=0.005 kg.m2。
电动汽车在实际行驶过程中,不可避免进行加速、减速的操作,所以对电机在稳态之后进行加速和减速的仿真分析,系统给定转速为1 000 r/min,达到稳态后,在0.4 s系统转速加速变为1 200 r/min,在0.7 s系统减速变为900 r/min。控制系统的仿真结果如图5所示,优化后的模糊PID与普通PID和模糊PID相比较,调节时间较少,即车子的加减速性能更好。图中PSO表示粒子群算法优化模糊控制系统,FUZZY表示模糊控制系统,PID表示常规PID控制系统。

图5 加减速时转速对比曲线
在电机达到给定转速,加速和减速时,优化后的模糊控制系统超调较小,稳态误差小,当转速改变时,能较快恢复稳定。图6、7和8是电机达到给定转速、加速和减速时局部放大的转速变化图。
优化后的模糊控制系统可以得到比较理想的转矩波形,而且波动较小。如图9所示。
电动汽车在实际行驶过程中经常会遇到坡路、不平路时的情况,而此时电动汽车的电机负载则随时有可能发生变化。因此对无刷电机控制系统给定速度时模拟通过坡路的情况下进行仿真,以此验证系统的稳定性能。系统给定转速n=1 000 r/min,在0.5 s时行驶道路坡度变为5°,坡道负载也相应增加。电机转速仿真结果如图10所示。图中优化后的模糊PID与普通PID和模糊PID相比较表明,优化后的模糊PID与普通PID和模糊PID相比较,鲁棒性更好。
电动汽车在实际行驶过程中速度总是在不断的调节。因此对无刷电机控制系统给定速度时进行干扰的情况下进行仿真,以此验证系统的抗干扰性能。系统给定转速n=1 000 r/min,然后外加一幅度为50 r/min的随机干扰信号。电机转速仿真结果如图11所示。图中优化后的模糊PID与普通PID和模糊PID相比较表明,优化后的模糊PID与普通PID和模糊PID相比较,有更好的抗干扰能力。

图6 稳定时转速对比曲线

图7 加速时转速对比曲线

图8 减速时转速对比曲线

图9 加减速时转矩对比曲线
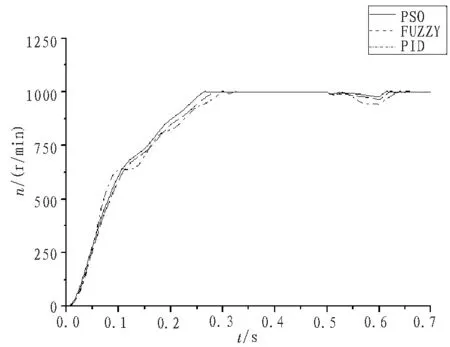
图10 爬坡时转速对比曲线

图11 有干扰时转速对比曲线
5 结束语
文中对电动汽车无刷直流电机控制方法进行了研究。通过对其特性进行分析,然后构建含整车动力学模块的直流无刷电机的仿真模型。采用粒子群算法优化后的模糊PID控制作为控制方法,运用所建Simulink模型对系统仿真。仿真结果表明,粒子群算法优化后的模糊PID控制的无刷直流电机系统可靠性高,而且反应更快,具有更强的鲁棒性,适用于电动汽车系统。
[1]彭海涛,何志伟,余海阔.电动汽车用永磁同步电机的发展分析[J].微电机,2010(6):78-81.
[2]卢东斌,李建秋,何涛,等.四轮轮毂电机驱动电动汽车无刷电机控制算法的研究[J].汽车工程,2012(10):871-877,893.
[3]张春燕,马其华,陈安红.电动汽车电机驱动控制系统设计研究[J].机械设计与制造,2012(2):116-118.
[4]张兴华,孙振兴,王德明.电动汽车用感应电机直接转矩控制系统的效率最优控制[J].电工技术学报,2013(4):255-260.
[5]夏长亮,方红伟.永磁无刷直流电机及其控制[J].电工技术学报,2012(3):25-34.
[6]张文升,胡勤耕,王文丰,等.直流无刷电机智能控制系统研究[J].计算技术与自动化,2012(3):69-75.
[7]赵鹏飞,俞建定,骆国庆.基于神经元PID的永磁无刷电机控制系统研究[J].机电工程,2014(7):892-897.
[8]殷云华,郑宾,郑浩鑫.一种基于Matlab的无刷直流电机控制系统建模仿真方法[J].系统仿真学报,2008(2):293-298.
[9]张琛.直流无刷电动机原理及应用[M].北京:机械工业出版社,2003.
[10]胡灵杰,李声晋,卢刚.基于Matlab无刷直流电机控制系统建模与仿真[J].机械与电子,2007(12):35-38.
[11]黄磊.基于DSP的无刷直流电机运动控制系统研究[D].西安:西安工业大学,2013.
[12]王俊兰,吴义忠,熊会元.纯电动汽车整车建模仿真研究[J].计算机仿真,2015(10):190-195.
[13]刘金琨.先进PID控制MATLAB仿真[M].北京:电子工业出版社,2011.
[14]胡灵杰,李声晋,卢刚.基于Matlab无刷直流电机控制系统建模与仿真[J].机械与电子,2007(12):35-38.
[15]王晓远,田亮,冯华.无刷直流电机直接转矩模糊控制研究[J].中国电机工程学报,2006(15):134-138.
[16]黄平.粒子群算法改进及其在电力系统的应用[D].广州:华南理工大学,2012.
[17]孟庆宽,仇瑞承,张漫等.基于改进粒子群优化模糊控制的农业车辆导航系统[J].农业机械学报,2015(3):29-36,58.
猜你喜欢
大电机技术(2022年5期)2022-11-17
防爆电机(2021年1期)2021-03-29
测控技术(2018年2期)2018-12-09
电子制作(2017年1期)2017-05-17
照明工程学报(2016年3期)2016-06-01
电测与仪表(2016年2期)2016-04-12
云南电力技术(2015年2期)2015-08-23
淮南师范学院学报(2015年3期)2015-03-22
电机与控制应用(2015年10期)2015-03-01
电机与控制应用(2015年1期)2015-03-01
