全站仪边角后方交会在水平位移监测中的应用
2018-01-22 08:17何名灯
福建建筑 2018年1期
何名灯
(福州市勘测院 福建福州 350108)
0 引言
近年来,随着国民经济的迅猛增长,全国各省市的城市建设也随之增加, 为保证城市建设的安全,根据相关要求,必须对其进行安全监测。
安全监测的项目主要有水平位移监测、沉降监测、水位监测、深层土体位移监测、轴力监测等项目。与其它监测项目相比,水平位移监测技术难度更高、运用方法更多。该项目监测方法主要基于以全站仪为载体的小角法、极坐标法、前方交会法等。其中极坐标法因设站方便,受施工干扰较少而成为主要的监测方法。
结合多数监测项目的工况条件,发现采用常规水平位移监测方法时,对基准点选埋位置的要求较为严格,比如所选点位置相对稳定、便于设站、方便联测等。且因施工区围挡施工,周边地理环境等原因造成基准点选埋困难,工作基点稳定性联测难度大,基准点稳定性不易保证。
鉴于上述情况,本文提出一种基于全站仪边角后方交会的方法在水平位移监测中的应用。采用该方法,因无须在基准点上设站,可直接埋设观测标志作为基准点,因此基准点布设更为灵活。在工作基点上可同时观测多个基准点,联测更为方便,可及时分析、判断基准点的稳定性;并结合某市桥梁监测案例, 阐述了布点及观测方法。通过成果精度分析,表明该方法适合于城市建筑基坑、重大工程的水平位移监测。
1 边角后方交会法
边角后方交会法类似于高速铁路所用CPⅢ控制网,基准点、工作基点、监测基点均为强制对中装制,采用固定设站按方向观测法对多个基准点(2个以上)和监测点进行边角观测,将观测得到的水平角、距离、天顶距按间接平差方法进行计算,从而得到设站点和待定点的坐标值[1-2]。
1.1 测站点、监测点坐标解算原理
以A、B两个基准点、一个交会点P(工作基点)为例,在交会点P处观测SPA、SBP及夹角ρ,按以下过程解算工作基点、监测点坐标,如图1所示。

图1 后方交会测量示意图
(1)根据已知控制点A、B,计算A、B两点之间的方位角αAB、αBA及边长SAB。
αAB=Arctg((YB-YA)/(XB-XA))
αBA=αBA±180

(1)
(2)根据SAB、SPA、SPB通过余弦定理求出夹角α、β:

(2)
(3)计算、分配三角网闭合差:
W=α+β+ρ-180
α=α-W/3
β=β-W/3
ρ=ρ-W/3
(3)
(4)计算测站点坐标:
(4)
(5)计算监测点坐标:
Xi=XP+Sip×cos(αPB+αi)
Yi=YP+Sip×sin(αPB+αi)
(5)
1.2 测站点精度分析
根据上述测站点的解算过程可知,影响后方交会精度的因子有:测角误差、测边误差、对中误差以及起算点误差等。由于基准点采用强对中装制,因此对中误差可忽略不计。
计算分析表明,该方法受交会网形结构的影响。基此,为方便讨论,利用测距精度0.6mm+1ppm,测角精度0.5″的数据,采用控制测量数据处理软件包CODAPS模拟计算对称交会,不同的交会角ρ对测站点精度的影响。同时模拟计算非对称交会,当交会角ρ固定时,α、β的变化对测站点精度的影响。
(1)对称交会精度分析:网形如图2所示,经计算分析,交会角越小成果精度越低,反之越高。当交会角ρ小于30°时会显著降低交会点的成果精度;当交会大于90°测站点精度优于1mm。该误差统计如图3所示。

图2 对称交会

图3 对称交会误差统计图
(2)非对称交会精度分析:网形如图3所示,经计算统计,当交会角ρ相同时,交会点的精度不会随α、β的改变而产生明显变化。该误差统计,如图5所示。
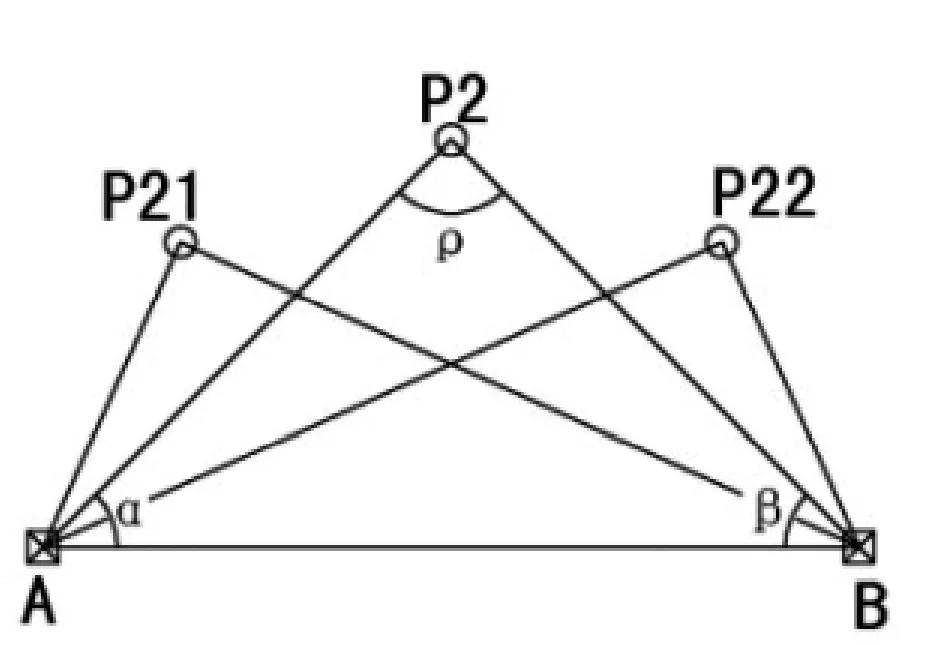
图4 非对称交会

图5 非对称交会误差统计图
1.3 监测点精度分析
根据后方交会求出测站点坐标后,再由测站上所观测的水平角、平距、计算监测点的坐标,得出影响监测点精度的主要因子有:由测角误差Mα测距误差Ms组成的观测误差Mg,测站点对中误差MC及监测点对中误差Md三部分组成[3]。因此观测误差MG可采用式(6)进行计算;监测点点位误差Mji可采用式(7)进行计算,当测站点、监测点采用强制对中标志时,测站点、监测点的对中误差可忽略不计。
(6)
(7)
1.4 优缺点分析
1.4.1优点
(1)因不在基准点上架设仪器,所以基准点选埋灵活,离 2~4倍基坑深度范围外相对的稳定区域和建筑物均可埋设基准点。
(2)基准点埋设方便,成本较低,可采用“L”型精密监测小棱镜固定于建筑上。
(3)基准点联测方便,每期位移观测前,可按方向观测法,联测2个以上基准点,以方便分析、判断基准点的稳定性。
(4)基准点、工作基点、监测点均采用强制对中装制,可减少对中误差对监测点的影响,监测精度高。
1.4.2不足
(1)交会网形结构选择不合埋,会显著降低监测成果的精度;按相关规范要求,运用该方法其交会角应大于90°。
(2)该网形类似“支导线”“星形网”,基准点间不构成任何闭合的网形,抗粗差能力较弱。
2 工程实例
某市一高架桥有桥墩位于河道两侧附近,因河道周边绿化填土施工,造成在河道两侧的桥墩向河道内侧偏移,最大偏移量达30cm。需根据监测数据,及时反映桥墩的位移情况,并指导周边绿化土卸载速率、纠偏方法及纠偏速率。因此,要求该项目的监测精度更高、更及时快速地反映位移变化情况。

图6 基准网点埋设示意图
结合现场工况条件,采用固定设站边角后方交会的方法按建筑变形二等的精度要求进行位移监测。在测区四周布设4个基准点,一个工作基点,河道两侧的每个桥墩上、中、下各布设一个监测点。基准点、监测点埋设方式相同,均采用“L”型精密监测小棱镜固定于建筑物上,工作基点采用强制对中观测墩。
2.1 数据采集
使用瑞士Leica Nova TS50i高精度全站仪进行观测,其测角精度0.5″ ,测距精度0.6mm+1ppm ,并有自动搜索棱镜、照准、观测和记录等功能,首期独立观测2次后取均值作为初始成果值。观测技术要求如表1所示。

表1 全站仪观测主要技术要求
2.2 数据处理
内业数据处理时,以桥轴线方向为纵轴,以垂直于桥轴线方向为横轴建立独立坐标系。采用控制测量数据处理软件包CODAPS进行基准网点平差计算。
首先,采用“空点法”对基准网进行平差计算,即固定任意两个基准点,其它基准点、工作基点作为待定点进行平差计算。并计算待定点两期间坐标分量的较差,综合分析、判断基准点、工作基点的稳定性。
其次,利用稳定的工作基点、基准点采用“一点一方向”的方法平差计算监测点坐标,如采用G11的坐标、G11至G14的方位角为起算要素,平差计算监测点坐标。
2.3 基准点稳定分析
当所测的坐标与上期测量成果之差不大于按式(8)计算的限差时,可认为基准点在两周期之间没有变形或变形不显著。
对于多期监测成果,还应综合分析其累积变化特征,当两期间变化量小,但多期间变形呈现出明显的变化趋势时,应认为其有变形。
(8)
μ—对应精度等级的坐标中误差,该项目取3mm;
n—两个基准点之间的观测测站数。
2.4 监测点精度分析
对于建筑变形位移监测,取变形允许值1/10~1/20作为位移量测中误差,二等水平位移监测点相对于基准点或工作基点的坐标中误差应小于3mm[4]。通过对位移量测定方法的分析及该项目位移监测点坐标中误差统计表(部分数据)可知,使用全站仪边角后方交会法可以满足该项目监测精度的要求,甚至达到一等监测精度的要求(一等水平位移监测点的坐标中误差应小于1mm),如表2所示。

表2 位移监测点坐标中误差统计表(部分数据) mm
3 结论
通过阐述、分析全站仪边角后方交会法的原理及其误差构成,并以某桥梁位移监测为例,得出全站仪边角后方交会在水平位移监测中的应用,不仅能获得较高的监测精度,且基准网埋设、联测方便。结合项目的实施情况,结论如下:
(1)采用全站仪固定设站边角后方交会法,坐标分量均能达到建筑变形二等的精度要求。
(2)通过分析后方交会的交会角不同引起交会点误差的变化,得出交会角越小成果精度越低,反之越高。当交会角ρ小于30°时会显著降低交会点的成果精度;当交会大于90°测站点精度优于1mm。
(3)基准点、工作基点及监测点采用强制对中装制能著显地提高监测精度。
(4)监测实施过程会出现基准点破坏、遮挡、不稳定等现象,为便于基准点的稳定性分析,建议埋设不少于5个基准点。
(5)受仪器误差、观测误差、交会误差、外界条件等因素影响。每次基准网复测、联测均存在一定的误差,与上次测量成果相比,若基准网未发生显著变化,应使用上次的成果,这样可保证起算基准的统一性、一致性,避免因基准网的测量误差、交会误差而影响监测点的精度。
(6)基准点的选埋应尽量选择在旁折光影响较小的区域,因旁折光引起的测量误差比较复杂,有待进一步探讨。
[1] 张伟国.采用自由设站边角交会法测量隧道内CPIII平面控制网的技术分析[J].矿山测量,2011(5):57-59.
[2] 何荣,崔灿.基于间接平差的自由设站法与监测点联合平差研究[J].河南理工大学学报,2013,32(3):298-301,319.
[3] 王庆,于先文.顾及已知点精度的自由设站算法及精度分析[J].东南大学学报,2009,39(2):372-376.
[4] JGJ 8-2016 建筑变形测量规范[S].北京:中国建筑工业出版社,2016.
猜你喜欢
初中生学习指导·提升版(2022年4期)2022-05-11
中学生数理化(高中版.高考数学)(2022年1期)2022-04-26
科学技术创新(2022年11期)2022-04-20
华中建筑(2022年4期)2022-04-14
阅读(科学探秘)(2021年10期)2021-03-08
当代水产(2019年1期)2019-05-16
山东工业技术(2017年24期)2017-12-29
中学生数理化·七年级数学人教版(2017年9期)2017-12-20
太空探索(2016年9期)2016-07-12
创业家(2015年1期)2015-02-27