矩形截面永磁环构成的Halbach永磁轴承结构优化
2018-01-29 11:13田录林吴少华田亚琦
电网与清洁能源 2017年11期
田录林,吴少华,田亚琦
(1.西安理工大学水电学院,陕西西安 710048;2.重庆江北中学,重庆 400714)
Halbach[1-2]阵列是用少量永磁体产生气隙强磁场的一种新型永磁体结构,在永磁轴承领域具有广阔的应用前景[3-5]。目前,永磁轴承的研究主要集中在双环永磁轴承,其磁力计算往往采用一些复杂的数值算法或经验公式[6-8]。陈殷等[6]先根据安培分子环流假说,用面电流法对矩形永磁体的空间磁场等效,从而推导出其空间磁场的表达式;再通过叠加原理和坐标变换,得到了Halbach阵列磁场的计算公式,可是并没有建立该阵列的磁力计算公式。徐飞鹏、李铁才等[7-8]对不同磁化方向的矩形截面永磁环组成的Halbach永磁轴承轴向磁力进行对比分析,得出在满足受力和刚度要求时90°旋转磁化方案是更易于实现的结论,但该文仅仅是仿真论证,既没有便于工程计算的磁力解析模型,也没有涉及永磁轴承的结构优化。在Halbach永磁轴承的磁力研究方面存在的主要问题是对Halbach永磁轴承的磁力研究基本都采用数值仿真算法,缺少便于工程技术人员掌握并能进行快速计算的磁力解析模型;在Halbach永磁轴承组装过程中,待安装磁环与已叠装磁环间的磁力大小相差较大,造成安装困难。安装Halbach永磁轴承时,待安装的磁环所受磁力相差较大的原因与构成Halbach永磁轴承的矩形磁环截面结构尺寸有关,因而对其结构进行优化就十分必要。该文基于田录林[9-11]、艾训鹏[11]等的相关文献首先建立由矩形截面永磁环构成的Halbach永磁轴承轴向磁力解析模型,接着建立待安装磁环所受磁力相差最小的优化目标函数及其约束条件,再采用布谷鸟搜索(Cuckoo search,CS)算法优化结构尺寸,最后用ANSYS软件仿真验证。本文旨在建立便于工程计算的由矩形截面永磁环构成的Halbach永磁轴承转子装配时,待装矩形磁环所受轴向磁力解析模型和便于Halbach永磁轴承装配的待装磁环受力差别最小的磁环尺寸比例关系。
1 Halbach永磁轴承转子待装磁环所受轴向磁力解析模型
1.1 两不同矩形截面永磁体轴向磁力公式
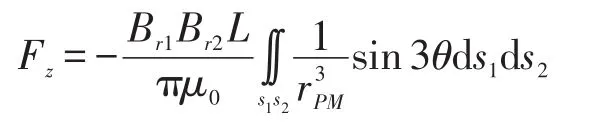
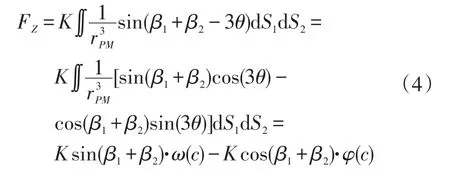
单位长度的两细条形永磁体之间轴向磁力[12-13]:

纵向长度为L的两个同向磁化的不同矩形截面永磁体参数如图1所示。箭头为永磁体磁化方向。β1、β2分别为j1和j2与X轴方向夹角;θ为rPM与X轴正方向夹角[14]。
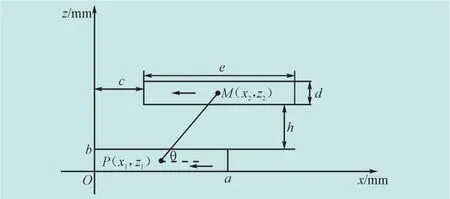
图1 两个不同矩形截面永磁体Fig.1 Two PMs of different rectangular section
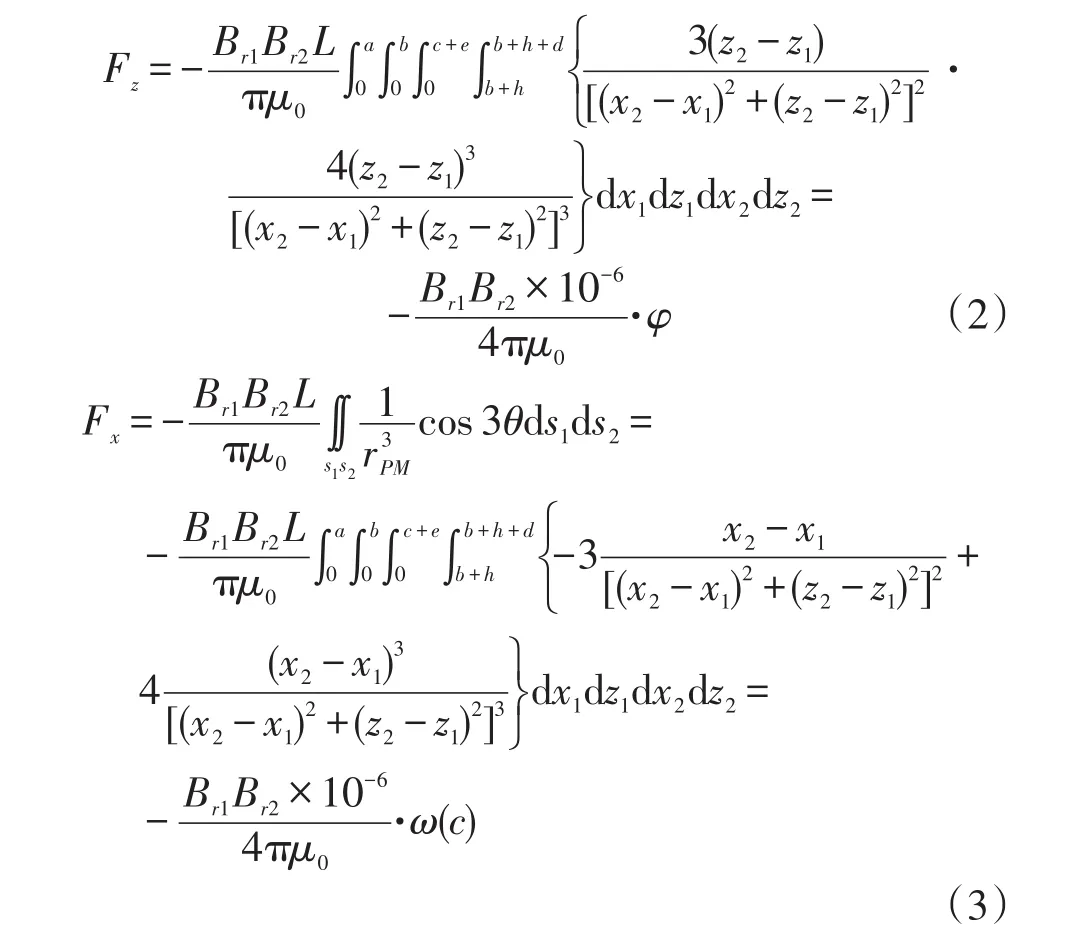
式中:
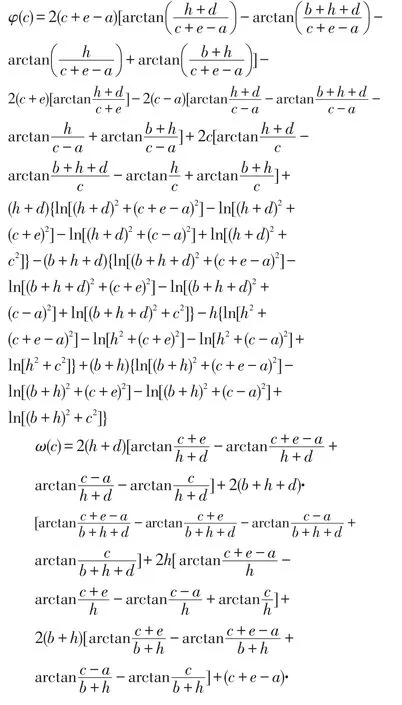
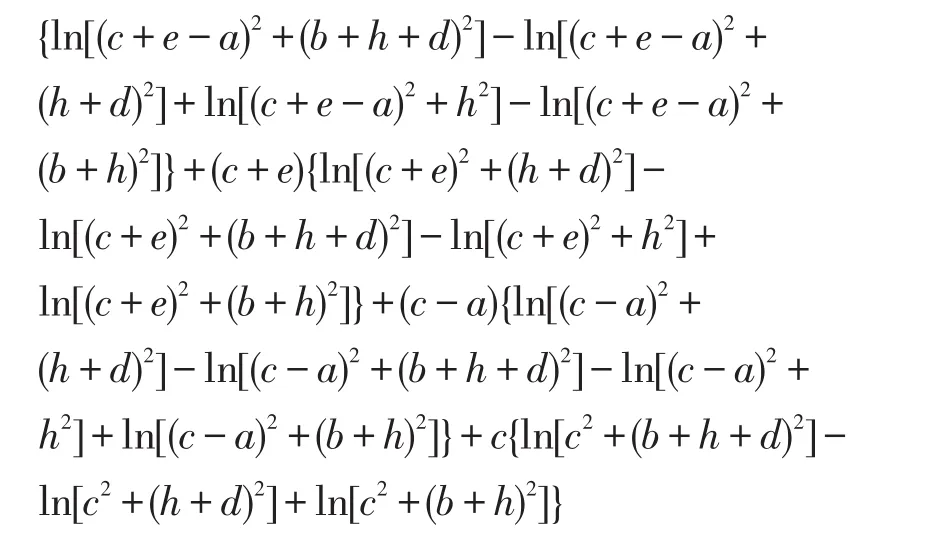
式(2)和式(3)是纵向长度为的同向磁化的不同矩形横截面永磁体磁力公式。适用任意磁化方向的两不同矩形截面永磁体的轴向磁力公式为
式中:
1.2 矩形截面永磁环构成的HALBACH永磁轴承转子待装磁环所受轴向磁力解析模型
图2所示Halbach永磁轴承的定子、转子分别由5个矩形截面永磁环组成,其中a和e(b和d)为两个不同矩形截面永磁环的径(轴)向尺寸,定子、转子相对磁环尺寸相同。本文建立转子磁环安装时所受的轴向磁力。
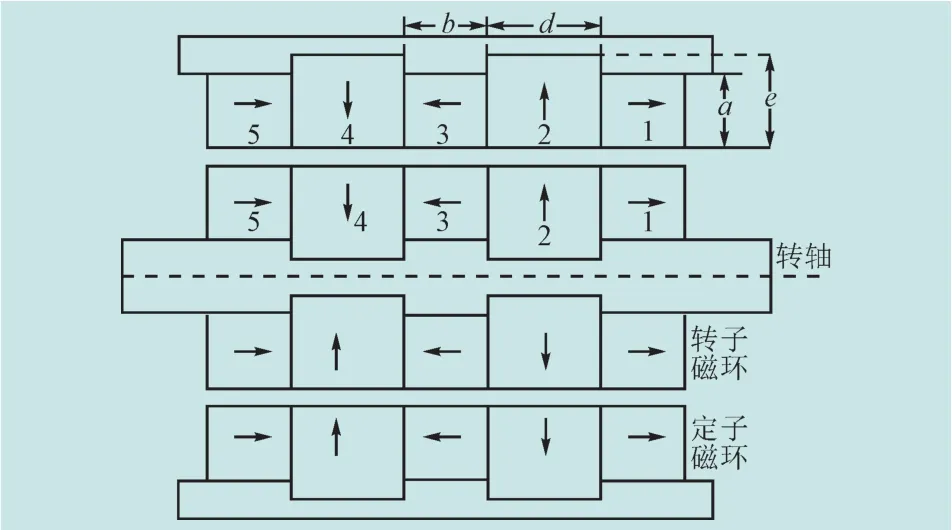
图2 矩形截面永磁环构成的Halbach永磁轴承结构图Fig.2 Structure chart of Halbach PM bearing constituted by rectangular section PM rings
根据图2所示,按编号从小到大,从左向右依次安装转子磁环,分析待装磁环所受的轴向磁力。
1)当β1+β2=0、β1+β2=π 时分别代入式(4)得轴向磁力Fz:

式中,当β1+β2=π 时取“+”号、当β1+β2=0或 2π时取“-”号。
1)贮养穴的位置和数量。贮养穴应位于根的集中分布区,一般在树冠投影边缘向内50~70厘米处。数量根据树冠大小及土壤条件决定,贵州山地果园7~10年生冠径为3.5~4米,设4个穴,成年树设6~8个穴。
2)当时分别代入式(4)得轴向磁力:

式中,当β1+β2=π/2时取“+”号;当β1+β2=-π/2时取“-”号。
式(5)和(6)是纵向长度为的两平行矩形截面永磁体的轴向磁力公式,亦可用于计算两矩形截面永磁环间的轴向磁力。则安装第i个永磁环时,第i个永磁环所受轴向磁力解析模型如下:
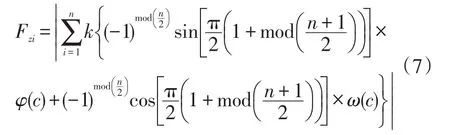
式中:c=0(图1所示磁环距z轴的距离),i∈[2,n]n为转子总的永磁环个数;
2 永磁轴承结构优化
2.1 优化的目标函数
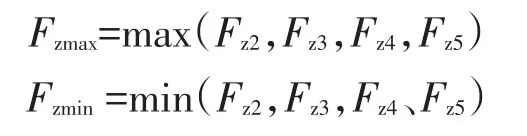
为了实现Halbach永磁轴承装配的待装磁环受力差别最小的目标,该文以5个磁环构成转子为例建立待装磁环受力差别最小的目标函数为:

其中:
考虑磁环加工工艺及安装的方便性,磁环尺寸取值范围如下(约束条件):
式中:Fz2,Fz3,Fz4、Fz5表示安装第i个永磁环时所受的轴向磁力。
2.2 CS优化算法
该文基于布谷鸟优化算法对上文的目标函数进行寻优计算。布谷鸟算法的思想是:布谷鸟繁殖时将蛋产在宿主巢中让其孵化,并采用两种途径更新鸟巢位置:1)鸟蛋被发现后,会被宿主挤出鸟巢或者宿主弃旧巢觅新巢,因此布谷鸟必须重新寻巢,此局部搜索过程可用发现概率Pa表示。2)布谷鸟采用具有全局搜索功能的莱维飞行模式寻巢。
可用以下3点理想化条件概括CS算法[15-16]:
1)每只布谷鸟一次只产一枚蛋,并随机选择鸟巢放置它。
2)最好的鸟巢将保留至下一代,且可利用的宿主鸟巢数量n不变。
3)宿主发现外来鸟蛋的概率为Pa。
2.3 CS优化结果
该文运用MATLAB2010软件编写CS算法程序,通过搜索轴向磁力分布函数η的最小值,寻得其最优结构。该算例参数设置如下:CS算法鸟巢种群数量为n=25,布谷鸟鸟蛋被宿主鸟发现的概率为Pa=0.25。当算法进行10 000次迭代且精度达到10-5后终止。η函数的维度设定为4维,莱维常数为1.5,磁环长度=1 000 mm,径向参数a、和e限定在[20,30]mm,轴向参数b和d限定在[15,25]mm。算法优化结果:
3 ANSYS仿真验证解析模型
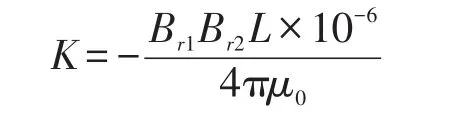
该文选用稀土NdFeB作为永磁轴承材料,其性能尺寸:Br=1.13T,矫顽力Hc=800 kA/m,相对磁导率为μr=1.124,磁环长度=1 000 mm。
将结构参数代入式(7)得到的解析模型计算值,再代入式(8)得到待装磁环受力差别最小的目标函数计算值,并与其ANSYS仿真值对比分析。下文图中RM、RA分别为待装磁环受力差别最小的目标函数计算值η、ANSYS仿真所得的待装磁环受力差别最小的目标函数值。具体计算结果如下:
待装磁环受力差别最小的目标函数值与图2结构参数的关系
1)待装磁环受力差别最小的目标函数值η与参数a的关系
e=27.50 mm,b=19.30 mm,d=18.81 mm,a[20,30]时待装磁环受力差别最小的目标函数值η与仿真值如图3所示。
由图3可以看出:η随着结构参数a的增大呈现先大幅减小后剧烈增加的趋势,且在a=27.5 mm处取得最小值,其与ANSYS仿真结果的最大误差为15.38%,最小误差为0.96%,平均误差为7.33%。
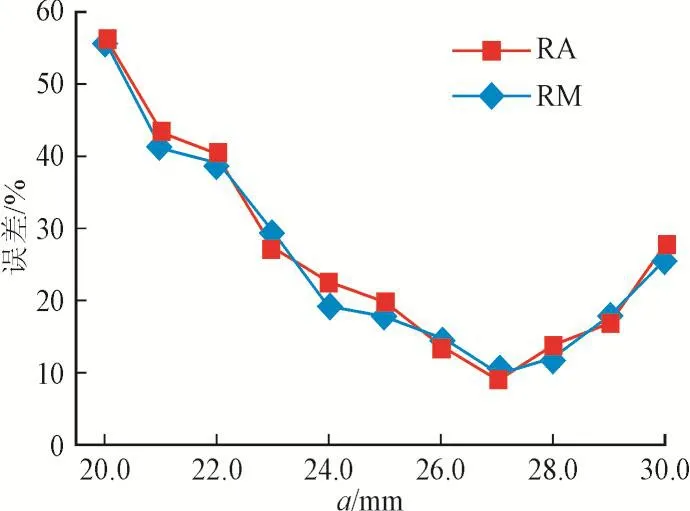
图3 待装磁环受力差别最小的η值与仿真值对比Fig.3 Comparison of the η value of the to-be-installed PM ring of minimum axial magnetic force difference with the simulation value
2)待装磁环受力差别最小的目标函数值η与参数e的关系
a=27.50 mm,b=19.30 mm,d=18.81 mm,e[20,30]时待装磁环受力差别最小的目标函数值η与仿真值如图4所示。
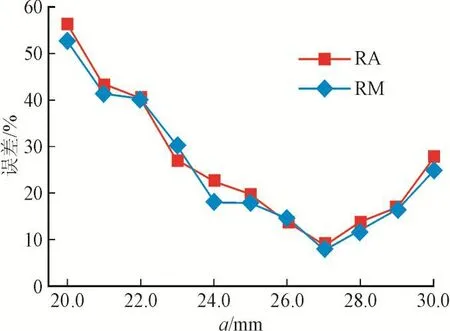
图4 待装磁环受力差别最小的η值与仿真值对比Fig.4 Comparison of the η value of the to-be-installed PM ring of minimum axial magnetic force difference with the simulation value
由图4可以看出:η随着结构参数e的增大呈现先缓慢减小后大幅增加的趋势,且在e=27.50 mm处取得最小值,其与ANSYS仿真结果的最大误差为19.28%,最小误差为0.27%,平均误差为8.46%。
3)待装磁环受力差别最小的目标函数值η与参数b的关系
a=27.50 mm,e=27.50 mm,d=18.81 mm,b[15,25]时待装磁环受力差别最小的目标函数值η与仿真值如图5所示。
由图5可以看出:η随着结构参数b的增大呈先急剧减小后不断增加的趋势,且在b=19.30 mm处取得最小值,其与ANSYS仿真结果的最大误差为10.27%,最小误差为1.98%,平均误差为4.97%。
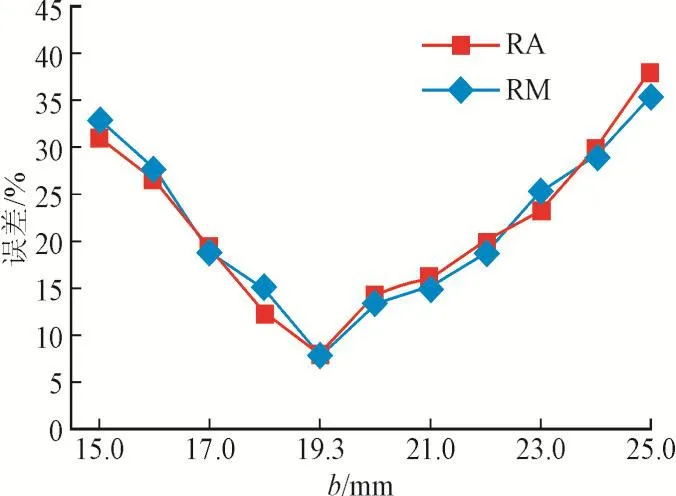
图5 待装磁环受力差别最小的η值与仿真值对比Fig.5 Comparison of the η value of the to-be-installed PM ring of minimum axial magnetic force difference with the simulation value
4)待装磁环受力差别最小的目标函数值η与参数d的关系
a=27.50 mm,e=27.50 mm,b=19.30 mm,d[15,25]时待装磁环受力差别最小的目标函数值η与仿真值如图6所示。
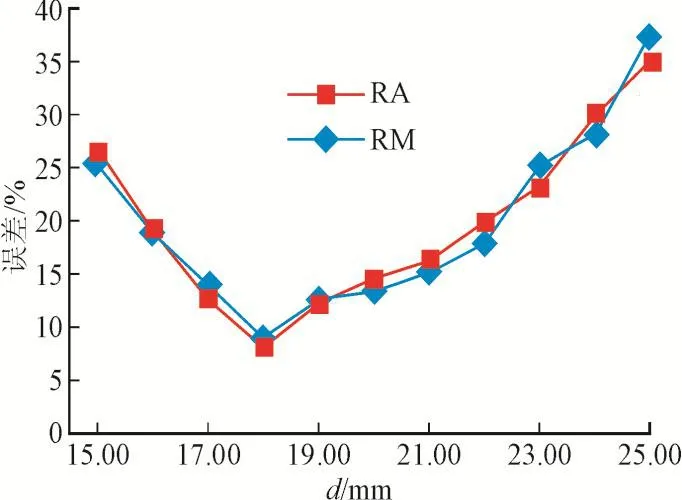
图6 待装磁环受力差别最小的η值与仿真值对比Fig.6 Comparison of the η value of the to-be-installed PM ring of minimum axial magnetic force difference with the simulation value
图7 ANSYS仿真图Fig.7 The simulation diagram of ANSYS
由图6可以看出:η随着结构参数d的增大呈先缓慢后逐步增加的趋势,并在d=18.81 mm取得最小值,其与ANSYS仿真结果(图7)的最大误差为11.72%,最小误差为1.98%,平均误差为7.06%。
4 结论
该文建立了由矩形截面永磁环构成的Halbach永磁轴承转子待装磁环所受轴向磁力解析模型,并通过CS算法求出了便于Halbach永磁轴承装配的待装磁环受力差别最小的磁环尺寸比例关系,ANSYS仿真验证了该文解析模型及优化结果的正确性。对比分析结果表明:η值随各结构参数增加都呈先减小后增大的趋势,都在最优结构时取得最小值,且a、e(b、d)变化时η的变化趋势基本相同。另外,优化结果及其较小的误差亦表明采用CS算法优化永磁轴承结构是行之有效的。
[1] HALBACH K.Design of permanent multipole magnets with oriented rare earthc cobaltmaterial[J].Nuclear Instruments and Methods,1980,01(169):1-10
[2] INSINGA A R,BAHL C R H,BJQRK R,et al.Perfor⁃mance of halbach magnet arrays with finite coercivity[J].Journal of Magnetism and Magnetic Materials,2016,01(76):41-45.
[3] ZHU Z Q,HOWE D.Halbach permanent magnet ma⁃chines and applications,areview.IEE.Proc.-Electr,power Appl.vol:148 No4.July.2001,299-308.
[4] Eichenberg,Dennis J.;Gallo,Christopher A.;Thompson,William K.Development and testing of an axial halbach magnetic bearing:a review NASA/TM-2006-214357,July.2006,15-47.
[5]WINDT C W,SOLTNER H,DUSSCHOTEN D V,et al.Portable halbach magnet that can be opened and closed without force:The NMR-CUFF[J].Journal of Magnetic Resonance,2011,208(1).27-33.
[6] 陈殷,张昆仑.Halbach永磁阵列空间磁场的解析计算[J].磁性材料及器件,2014,01(1):1-9.CHEN Yin,ZHANG Kunlun.Analytic calculation of the magnetic field created by Halbach permanent magnets array[J].J Magn Mater Devices,2014,01(1):1-9.
[7] XU Feipeng,LI Tiecai,lIU Yajing.A study on passive magnetic bearing with halbach magnetized array[C]//El ectrical Machines and Systems,2008 International Con ferenceon:Wuhan, China, ElectricalMachinesand Systems,2008 International Conference on.
[8] 徐飞鹏,李铁才.采用Halbach磁场的新型被动磁轴承仿真[J].电机与控制学报,2007,11(5):538-541.XU Feipeng,LI Tiecai.Simulation of new type of passive magnetic bearing using Halbach magnetic field[J].Electric Machines and Control,2007,11(5):538-541.
[9] 田录林,李言,田琦,等.轴向磁化的双环永磁轴承轴向磁力研究[J].中国电机工程报,2007,27(36):41-45.TIAN Lulin,LI Yan,TIAN Qi,et al.Research on double permanent magnet axial magnetic bearings axially magnetized[J].Proceedings of the CSEE,2007,27(36):41-45.
[10]TIAN Lulin, TIAN Yaqi,JIA Rong.Magnetic force analytic of step conical PMB[J].International Journal of Applied Electromagnetics and Machanics,2015(47):293-304.
[11]TIAN Lulin,AI Xunpeng,TIAN Yaqi.Analytical model of magnetic force for axial stack permanent magnet bearings[J].Transactions on Magnetic IEEE,2012,48(56)2592-2699.
[12]田录林,张靠社,王德意,等.永磁导轨悬浮和导向磁力研究[J].中国电机工程学报,2008,25(7):135-139.TIAN Lulin,ZHANG Kaoshe,WANG Deyi,etal.Research on the levition and guidance magnetic force of permane ntmagnetic bearings[J].Proceedings ofthe CSEE,200 8,28(21)135-139.
[13]田录林,杨晓萍,李言,等.适用于永磁悬浮轨道及永磁轴承的解析磁力模型研究[J].摩擦学学报,2008,28(1)73-77.TIAN Lulin,YANG Xiaoping,LI Yan,et al.Analytical magnetic force model for permanent magnetic guideway and pereanent magnetic bearings[J].Proceedings of the Tribology,2008,28(1):73-77.
[14]田录林,安源,李言,等.轴向放置轴向磁化的多个永磁环轴承轴向磁力研究[J].机械科学与技术,2008,(4):549-553.TIAN Lulin,An Yuan,LI Yan,et al.Research on the axialmagnetic force ofaxialplacementand axial magnetization multi-annular-shaped permanent magnetic bearings[J].MechanicalScience and Technology for Aerospace Engineering,2008,27(4):549-553.
[15]YANG Xinshe,Debsuash.Cuckoo search via lévy flights[C].Proceedingsof World Congress on Nature&Biologically Inspired Computing,Piscataway IEEE Publication,2009,8(10)210-214.
[16]YANG Xinshe,Deb suash.Engineering optimization by cuckoo search[J].Int’l Journal of Mathematical Modeling and Numerical Optimization,2010,1(4):330-343.
猜你喜欢
作文小学中年级(2023年1期)2023-02-12
小学科学(2022年23期)2023-01-30
电力自动化设备(2022年6期)2022-06-15
防爆电机(2022年1期)2022-02-16
格言·校园版(2021年22期)2021-09-27
商品与质量(2021年29期)2021-07-19
微特电机(2021年1期)2021-01-25
仪表技术与传感器(2020年5期)2020-06-11
现代应用物理(2016年4期)2017-01-19
电工技术学报(2015年6期)2015-11-15