基于EEMD和能量分离的风电机组传动系统的故障诊断方法
2018-02-20 12:09段震清孟恩隆王灵梅
噪声与振动控制 2018年6期
段震清,孟恩隆,王灵梅,李 煌
(山西大学 山西省风电机组监测与诊断工程技术研究中心,太原 030013)
由于风电机组运行工况具有随机性、间歇性、变载荷等特点,使得风电机组传动系统的振动信号具有复杂的非线性、非平稳性及复杂调制的特点,导致风电机组传动系统的故障发生时难以有效及时提取和识别[1]。对于非线性、非平稳的振动信号处理主要方法有小波分析法、短时傅里叶变换(STFT)、经验模式分解(EMD)等[2]方法。小波分析具有良好的时间、频率局部化能力、具有多分辨率等优点,但仍是一种基于基函数的分析方法,在时频平面上排列是一种固定形式,缺乏对信号的适应性。短时傅里叶变换具有一定时频分析能力,但是只能反映信号的整体特性并且要求信号满足平稳条件。EMD是美籍华人N.E.Huang等人提出一种自适应的非线性、非平稳信号分析方法,但是EMD分解存在着端点效应和频率混叠的现象[3]。针对上述不足,Wu等人提出基于一种噪声辅助以解决模态混叠效应的方法[4-5]—集合经验模态分解(EEMD)。目前用于估计信号的幅值包络和瞬时频率最广泛使用的解调调制信号方法是Hilbert变换,然而Hilbert需经过傅立叶变换处理,这过程中破坏了瞬时信号的自适应能力。而能量分离[6]可以避免上述不足,它利用能量算子对信号的瞬时变化和良好的精细时间分辨率的适应性,来估计信号的幅值包络和瞬时频率。然而,能量分离算法受单分量和窄带要求的限制。风电机组的传动系统的非平稳振动信号由多个部件(如行星齿轮箱和轴承等)产生的信号组成,如果直接对风机传动系统故障信号进行能量分离算法解调,将产生严重的频带错乱,将错乱的频带信号用来故障诊断分析会导致错误的结论。
因此,本文提出了一种基于EEMD和能量分离的算法来计算振动信号的瞬时频率和幅值包络,通过进一步解调分析,可用于风电机组传动系统的故障诊断。首先,使用EEMD将振动信号分解为一系列单分量的IMF,以满足能量分离对单分量的要求,然后根据峭度和相关系数选取包含故障最多且与原信号相关系数比较大的IMF分量,并且用能量分离算法求出该单分量的幅值包络和瞬时频率,再进一步分别做Fourier变换求出包络谱和瞬时频率谱,最后根据解调信号中故障特征频率成功诊断出传动系统的故障部位和类型,证实了所提方法的准确性和有效性。
1 分析过程
风电机组传动系统主要由主轴、轴承、行星齿轮箱等部件组成,其中由于齿轮箱的结构和振动传递路径改变等综合因素的影响进一步增加了信号的复杂性。文献[7-11]考虑了行星齿轮传动机构的动力学特点以及齿轮常见的故障类型,建立了正常、局部式、分布式故障状态下的振动信号模型,并且推导出相应太阳轮、行星轮和齿圈的故障特征频率公式。
基于EEMD和能量分离的分析方法基本步骤如下:
(1)应用EEMD将振动信号分解为一系列无模态混淆的IMF单分量成分。
(2)根据峭度和相关系数选取包含故障最多且与原信号相关性较大的IMF分量。
(3)应用能量分离算法估计步骤(2)所选定的IMF分量的瞬时频率和幅值包络。
(4)进一步做Fourier变换,得到包络谱和瞬时频率解调谱,根据频谱中的峰值频率以及齿轮的故障特征频率进行故障诊断与分析。
2 仿真信号分析
为了论证所提方法的有效性和准确性,模拟了一个行星齿轮箱故障振动信号,可由文献[7-11]中调频-调幅模型来表示。不失一般性,现在假设发生故障的部位是太阳轮,并且不考虑谐波因素,只考虑载波频率和调制频率的基频,则太阳轮故障振动信号模型可以简化为

信号分析结果如图1所示,图1(a)为信号的时域波形,图1(b)为信号经EEMD分解后得到的前6个IMF分量(第1个为原始信号图)。计算各个IMF的相关系数和峭度,如表1所示,发现IMF1的峭度值和相关系数均明显大于其他IMF,因此选择IMF1分量进一步分析。基于能量算子计算得到瞬时频率和幅值包络,并进行Fourier变换,得到瞬时频率Fourier谱和包络谱,结果如图1(c)和图1(d)所示。在图1(c)所示的瞬时频率Fourier谱中,主要的峰值频率为太阳轮的旋转频率和太阳轮的故障频率fs。在图1(d)所示的包络谱中,太阳轮的故障频率
fs、太阳轮旋转频率以及它们组合频率处峰值明显。上述结果符合太阳轮振动信号特征。同时为了对比,对原始信号进行了瞬时频率和包络的 Fourier变换,见图 1(e)和图 1(f),在图 1(e)所示瞬时频率Fourier谱中,主要频率为太阳轮的故障频率fs、太阳轮的旋转频率同时还出现了别的峰值频率,相比于IMF1该频谱成分更复杂。在图1(f)所示包络谱中,尽管主要峰值频率为太阳轮的故障频率fs、太阳轮的旋转频率以及它们的组合频率但是它们的振动幅值明显弱于IMF1,会对故障诊断造成严重干扰,不利于精准的分析。对于相关系数和峭度值较大的作为次优选择的IMF2,其瞬时频率谱解调图和包络谱,见图1(g)和图1(h)。在图1(g)所示瞬时频率Fourier谱中,主要峰值频率为和fs,同时还出现了别的峰值频率成分,相比于IMF1更复杂。在图1(h)所示包络谱中,仅看见主要的峰值频率为故障频率fs已经看不见了。这更进一步证明所提方法的有效性和优越性。

图1 仿真信号分析
3 实例应用
3.1 传动系统中齿轮箱故障
3.1.1 实例说明
为验证所提方法在风电机传动系统中的有效性,选取山西省某风电场某台风机在2017年3月份儿齿轮箱行星轮故障时的数据进行分析。风机的齿轮箱如图2所示。行星轮故障如图3所示,其中行星齿轮箱的结构参数见表2所示。
为测量振动信号,在齿轮箱表面安装了多个加速度传感器,本文分析在行星级上方的齿轮箱表面处的传感器振动信号。现场工况下齿轮箱高速端转速为1 501 rad/min,根据齿轮箱结构参数和转速,计算得到行星级各齿轮的局部故障特征频率见表3。
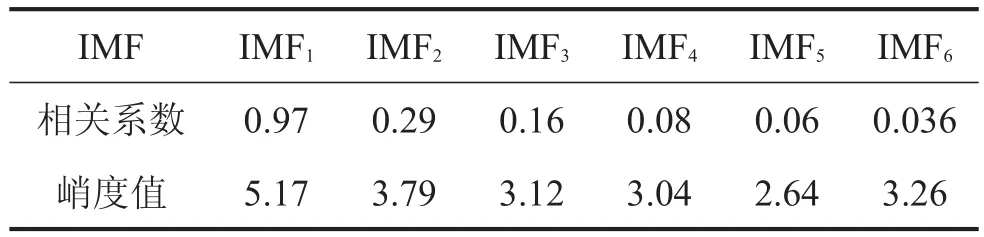
表1 各IMF相关系数和峭度值

图2 风电机组行星齿轮箱

表2 行星齿轮箱参数

图3 行星齿轮局部损伤
3.1.2 实例信号分析
(a)正常信号
图4为正常信号分析结果,其中图4(a)为信号时域波形,图4(b)为经EEMD分解后得到的前6个单分量IMF,计算各个IMF的峭度值和相关系数,如表4所示,发现IMF1的相关系数和峭度值均大于其它IMF分量。因此选择IMF1做进一步分析,图4(c)和图4(d)分别为瞬时频率Fourier谱和包络谱。除固有频50 Hz及其倍频处,其中峰值主要出现在行星架旋转频率fc及其倍频nfc处。这是由于齿轮箱的啮合振动的调制效应及齿轮设计制造误差和安装误差所造成,这些现象符合正常信号的理论特征。
(b)行星轮故障信号
图5为行星轮故障信号的分析结果。经EEMD分解得到前6个分量IMF,计算各个IMF的峭度值和相关系数,如表5所示。
发现IMF3的相关系数和峭度值均大于其它IMF分量。因此选择IMF3做进一步分析。由图5(c)所示瞬时频率Fourier频谱和图5(d)所示包络谱可见,除了固有频率50 Hz及倍频外,行星轮故障特征频率的287倍频与行星架旋转频率的组合287fP+fc以及5fP占主导地位,其他峰值主要出现在行星轮故障特征频率fP及倍频处和行星架旋转频率fc以及倍频nfc的组合处nfP±fc处。其中的一些峰值与行星架旋转频率及其倍频有关,是因为行星轮可能发生局部故障导致行星架载荷配不均匀,使得行星架的旋转频率及其倍频处峰值增大。由图5(e)可见行星轮故障信号包络谱在各个频率处的幅值均明显大于正常信号。这些特征说明齿轮箱的行星轮发生了故障,上述分析结果符合现场实际情况。

表3 行星齿轮箱特征频率/Hz

图4 正常齿轮信号
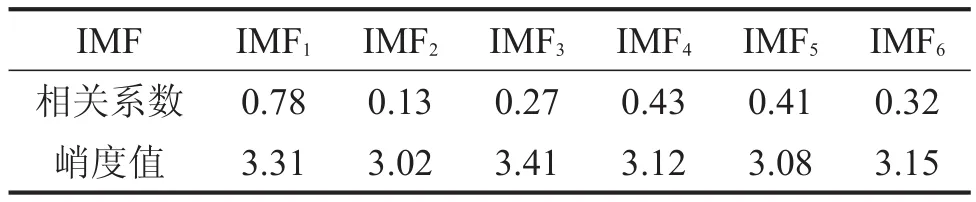
表4 各IMF相关系数和峭度值(正常信号)

表5 各IMF相关系数和峭度值(故障信号)
3.2 传动系统轴承故障
选用与对风机传动系统中的主轴相同材质型号的以SKF公司轴承为缩比模型的轴承进行外圈故障诊断。其参数为:轴承滚动体接触角为α=0°;滚珠数量n=9个;直径d≈7.94mm,轴承滚珠直径D≈39.04mm。在r≈1796rad/min的转速下以12 kHz的采样频率连续采集10 s的故障数据。根据滚动体外圈故障特征频率计算公式,代入上述参数计算可得

信号分析结果如图6所示,经EEMD分解后,计算各个IMF分量峭度值和相关系数如表6所示并最终选择IMF1进一步分析。

表6 各IMF相关系数和峭度值
由图6(a)所示的瞬时频率Fourier频谱可见,轴承的故障频特征频率及四倍频占主导地位。图6(b)所示的包络谱中可明显看到轴承的故障特征频率及倍频,与理论值近似吻合,表明轴承外圈发生了故障,与已知轴承外圈滚道发生磨损故障相吻合。与图6(c)所示原始信号瞬时频率Fourier频谱和图6(d)及图6(e)所示的IMF2的图分别进行对比分析,图6(c)中故障频率的4倍频占主导地位,轴承故障特征频率几乎难以发现。在图6(d)中故障特征频率及其倍频完全被干扰频率所淹没,难以辨识,且在图6(e)中的包络峰值远小于IMF1的包络峰值,这再次证明了所提方法的有效性和优越性。

图5 行星轮故障信号
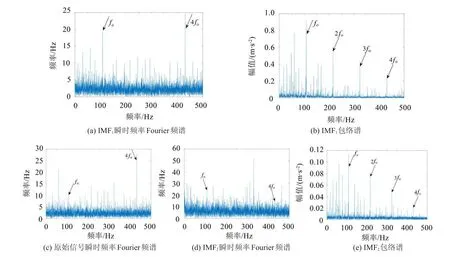
图6 轴承故障信号
4 结语
本文从风电机组传动系统振动信号的非线性、非平稳特征入手,提出了基于EEMD和能量分离的故障诊断新方法。首先将振动信号经EEMD分解为一系列IMF,以满足能量分离算法解调对单分量的要求,然后根据最大相关系数和峭度值选择最佳的IMF作进一步分析,从瞬时频率Fourier谱和包络谱两方面联合对传动系统部件的故障特征频率进行诊断,最后通过实验信号和现场实际运行数据证实了本文所提方法的有效性,为风电机组传动系统的故障诊断提供了新思路。
猜你喜欢
航空学报(2022年9期)2022-10-14
电子技术与软件工程(2021年14期)2021-09-23
铁道机车车辆(2020年2期)2020-05-20
科技创新与应用(2020年4期)2020-02-25
光学仪器(2019年3期)2019-02-21
制造技术与机床(2018年12期)2018-12-23
雷达学报(2018年1期)2018-04-04
湖北农业科学(2017年12期)2017-07-15
军事交通学院学报(2017年5期)2017-06-05
中国光学(2015年5期)2015-12-09