
容器液位视觉检测方法研究
2018-02-26 07:34杨慧英
装备制造技术 2018年12期
杨慧英
(1.沈阳理工大学自动化与电气工程学院,辽宁沈阳110159;2.东北大学信息科学与工程学院,辽宁沈阳110000)
1 视觉液位检测方法的提出
液位通常是指密闭容器或是开口容器内液体的液面高度。工程应用中容器可能是透明的和非透明的,形状也大小不一。现有的液位检测方法有很多,如微波检测法、超声波检测法、光电式检测法、浮球式检测法等,这些方法各有特点但对于透明含有泡沫或是有蒸汽、粉尘等液体液位都不太适合,浮球式则不太适合粘稠液体的液位检测,所有方法也都不太适合有腐蚀性以及高温液体的液面检测。为此本文提出一种非接触式的检测方法,利用机器视觉原理基于数字图像处理理论对容器内液位进行检测。这种方法对于原容器工作情况不破坏不干扰,只需在合适位置架设图像采集装置,设备安装改造容易。
2 本文视觉液位检测的问题描述
通常在液位检测之前有以下几个问题需要关注:(1)容器的种类是密闭容器还是开口容器;(2)容器的材质即容器为透明容器还是非透明容器;(3)容器内的液体为腐蚀液体、高温液体或是其它特殊情况液体;(4)容器器形主要是形状和大小方面的考量。本文主要利用视觉检测方式探讨以下两种情况下的液位检测。透明容器内液位检测(密闭容器开口容器均可)和非透明开口容器内的液位检测。以下是两种情况的问题描述。
2.1 透明容器液体液位检测问题描述
利用视觉检测方式对透明容器内的液体液位进行检测,由于容器外壁透明,利用图像检测的方式可以将摄像头垂直与容器外壁架设,如图1所示为一透明容器,容器内黑色区域为容器内液体。图中利用摄像头可以获取到透明容器的切面。图像获取后可以直观通过分析得到,图像中的液位和实际液位有关联。
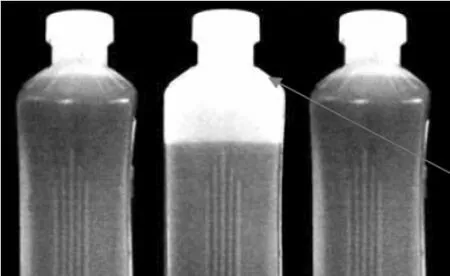
图1 密闭透明容器液位情况
2.2 非透明开口容器液位检测问题描述
对于透明开口容器或是透明封闭容器都可以利用2.1中所述方法进行检测。如果是液位检测报警可以直接通过是否到达警戒液位线给出判断即可,如果是需要给出容器内具体液位高度则需要设计标尺进行标定转换计算出实际液位。对于非透明容器来说很难直观的从纵切面图形中获取到。如果是密闭非透明容器可以采用红外热像方法获取图像。如果是开口非透明容器可以采用采集容器横截面图像状态(图2所示),通过提取液位特征参数进行。
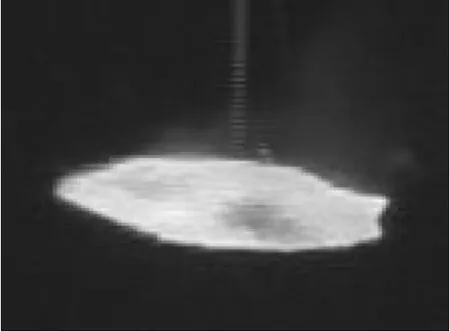
图2 非密闭不透明容器横截面图像
3 实际问题的处理流程与主要算法
3.1 图像处理流程
无论是透明还是非透明的容器利用图像检测方法进行液位检测基本的图像处理流程基本都需要以下几个步骤:
(1)原始图像采集:透明容器摄像头垂直于容器侧壁采集;非透明开口容器采集容器口横截面图像。
(2)灰度化:降低原始图像的色彩信息为预处理与特征提取提供条件。
(3)图像增强:可以提升原始图像目标与背景的对比度。
(4)图像去噪:去除影响特征提取的图形元素。
(5)二值化:将目标与背景进行二值分离,得到有效的目标边缘或是区域特征。
3.2 灰度化与阈值分割
实际检测过程中,利用图像获取单元采集到的图像信息多为彩色图像,为此需要进行灰度化和阈值分割等图像预处理操作。灰度化处理可以采用均值化公式(公式1)进行。

灰度化处理后仍可以看到液体区域虽然具有相同属性,但由于光线、采集位置等问题,液体区域为灰度相近的一片区域,但是并不是每一个像素点都是相同灰度值,为此需要进一步进行阈值分割,目的是得到对比明显的液体区域和非液体区域。
阈值分割就是将阈值与图像中每个像素值进行比较划分:设原始图像为f(x,y),分割处理后的图像为 g(x,y),T 为阈值,则有:

对于T的选取有很多算法,迭代法如下:
(1)首先估计一个初始全局阈值,选取所有像素点的灰度平均值作为第一次的分割阈值T;
(2)用T将图像分为大于T和小于T的两个区域R1和 R2;
(3)分别计算R1和R2两个区域的像素点平均灰度 U1和 U2;
(4)推算新的下一轮阈值T=(U1+U2)/2;
(5)重复上述步骤(1)~(4)几次直到上一次阈值和本次阈值相等,则结束迭代过程,最后一次的T为最终的分割阈值。
3.3 液位线特征提取与识别
阈值分割可以得到成片的液体区域特征,边缘检测则可以得到目标的边缘特征信息,进而提取和液位相关的参数。1)对于透明容器可以采用如下方法:遍历出最上和最下的边界,统计边界之间的像素特征,通过统计给出当前液面是否达到要求。2)对于非透明容器本文以开口容器为例,可以得到容器开口处截面图像的区域特征。接下来采用边缘检测算法提取出边缘特征。
边缘检测算法有很多,主要是选取不同的边缘检测算子多图像进行模板运算,用算子利用卷积近似计算,常使用的一阶算子有Roberts算子、Sobel算子和Prewitt算子。其基本运算原理如下,已知一个3×3大小的图像(如图3所示),中心点z5表示f(x,y),那么z1就代表f(x-1,y-1),其它各点表达式可依此类推,则用于计算标记为z5的点的梯度模板可以由以下定义给出:
一阶微分算子定义为:
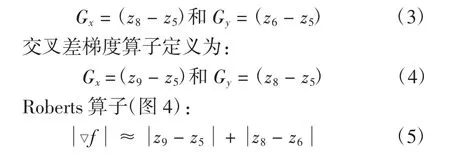
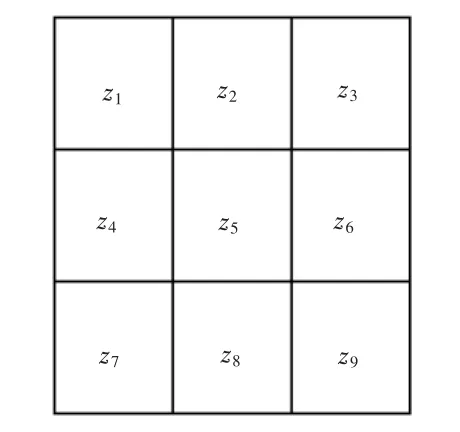
图33 ×3图像区域
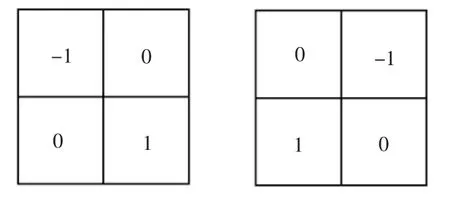
图4 Roberts交叉梯度算子
4 实验结果分析与结论
如图5所示为利用3.2所述算法进行的灰度化与阈值分割的处理结果,从结果中可以看出,由于彩色图的每一个点是R、G、B三个颜色分量构成,每个分量占用一个字节,一个点就要占用三个字节,为了图像的有效特征提取将彩色图转化为灰度图后既保留了原有目标的特征,又降低了图像的数据量以及存储空间。二值化的目的是将灰度图中的目标和背景分割为两个明显的黑白区域,将所有背景归为黑色,将有效目标归为白色,进一步为边缘或区域特征的提取奠定基础。
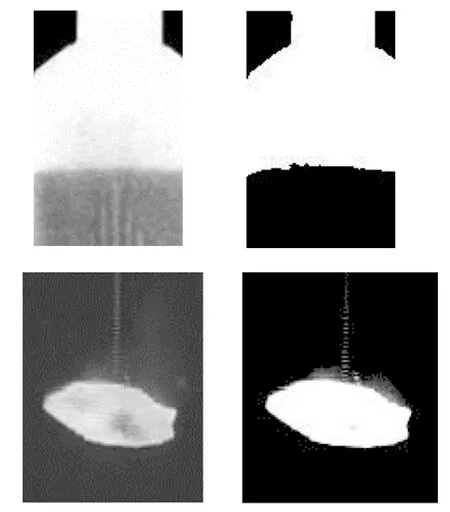
图5 灰度化与阈值分割结果
如图6所示为利用3.3所述算法对二值图像进行处理提取出的边界特征,可以看出透明容器直接可以从图中得到一个明显的液面边界信息,对于不透明的容器可以得到的是开口容器的截面图形边缘,这些边缘信息进行下一步的特征提取算法处理就可以得到液位是否达到预先要求的判断。
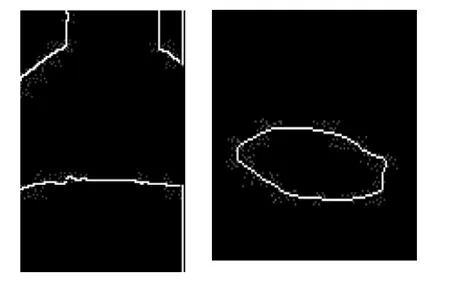
图6 边缘检测结果
综上所述,通过对比基于图像检测方法对透明容器和非透明容器内的液位检测是不同的。透明容器由于容器本身透明的特性很容易利用图像得到具有液位特征的图像,主要是架设好图像采集单元的位置配合后续算法即可完成。对于非透明容器情况就会复杂一些,如果是密闭非透明,那么需要采集红外热图像才有可能得到有效的图像液位特征图。本文对比的非密闭敞口不透明容器则没法得到水平液位线特征图,但是可以利用容器横截面图形特征进一步推导截面特征与液位的关系。因此利用图像方式进行液位检测属于非接触检测,特别适合腐蚀性液体和高温液体液位检测情况,具有现实应用意义。
猜你喜欢
数学物理学报(2022年5期)2022-10-09
石油工业技术监督(2022年7期)2022-08-18
北京航空航天大学学报(2022年6期)2022-07-02
高校应用数学学报A辑(2022年2期)2022-06-21
数学物理学报(2021年2期)2021-06-09
天津医科大学学报(2021年1期)2021-01-26
校园英语·上旬(2020年1期)2020-05-09
自动化学报(2017年5期)2017-05-14
浙江理工大学学报(自然科学版)(2015年7期)2015-03-01
汽车维护与修理(2015年2期)2015-02-28
