
基于改进MSER与SIDs特征的遥感图像配准算法
2018-03-12 09:29,,
太原师范学院学报(自然科学版) 2018年4期
, ,
(1.运城学院 数学与信息技术学院,山西 运城 044000;2.西北工业大学 计算机学院 光学影像分析与学习中心,陕西 西安 710072)
0 引言
图像配准是根据某种相似性度量对取自不同时间、不同视角、不同场景的两幅或者多幅图像进行空间对准的过程[1],被广泛应用于动态目标检测、图像融合、医学影像分析等诸多领域.
遥感图像配准作为遥感图像处理的重要研究内容,是实现图像校正、目标识别、图像重建等的关键步骤.目前,图像配准算法主要分为基于灰度和基于特征的图像配准算法两类.基于灰度的配准方法利用图像的灰度信息估计变换参数,算法实现简单,但计算量大.基于特征的图像配准算法通过提取图像中的显著特征,利用匹配的特征估计变换模型,定位精度高、鲁棒性好,可实现高效配准,已成为目前主流的图像配准算法.文献[2]提出的尺度不变特征变换(Scale Invariant Feature Transform,SIFT)是一种典型的基于特征的图像配准算法,因其具有较好的尺度、旋转不变性,以及对光照、噪声和仿射变化具有较强的鲁棒性等优点而得到广泛的应用.在此基础上,国内外学者提出了一系列改进算法[3-13].文献[7]在配准遥感图像时,利用局部K近邻点的三角面积比构造仿射不变的描述子,提出了一种稳健的点匹配算法.传统点特征的配准方法此时往往会提取大量的特征点,特征匹配耗时长,且特征点分布密集,容易产生误匹配,影响配准的精度.文献[8]将加速稳健特征(Speeded Up Robust Features,SURF)的特征点作为最小生成树的顶点,构造了一种新的区域描述子,在配准自然和城区图像时表现出较高的精度和鲁棒性.文献[9]提出一种基于区域的多尺度方法,其通过提取图像的局部高对比度区域来获得显著SIDs特征,但不具有仿射不变性.文献[10]将仿射归一化方法与相干点漂移算法(CPD)相结合用于SAR图像配准中,取得了较好配准效果,但其特征描述简单难以保证较高的识别精度.
对于一些存在较大变形且纹理结构丰富的遥感图像,采用单一特征进行匹配,难以获得较高的配准精度.考虑到区域特征区分度高,包含的信息多,不会出现因检测轮廓或点的不准确而得到较差的配准效果同时点特征对位置变化敏感,定位精确,本文将点特征与区域特征相结合提出一种新的仿射不变的图像配准算法,首先将MSER特征用于粗匹配,再利用高斯函数来精确定位MIMF响应的极值点,获得稳定特征点并匹配,从而精确估计变换参数.所提算法有效利用了MSER特征,减少了不必要的特征点,提高了配准的效率和精度.
1 改进的SIDs特征点和MSER特征提取算法
1.1 SIDs特征提取
SIDs基于图像的灰度值直接提取而来,反映了图像中的高对比度区域,SIDs特征可采用多尺度各向同性相匹配滤波方法(MIMF)[11]进行快速提取.
SIDs特征点的提取主要包括特征点的尺度估计、特征点的精确定位及筛选三个步骤.
设点(i,j)的尺度为ρ,尺度因子m,满足1≤m≤Λ,Λ为给定的尺度上限,定义SIDs控制点的局部尺度ρ为尺度空间满足同质约束的局部对比度的最大值,即:

(1)
其中,e(i,j,m)为点(i,j)对应尺度m的局部对比度的估计,d(i,j,m)表示区域的一致性,α为约束系数.由(1)式可估计出SIDs控制点的局部尺度ρ,进而检测SIDs控制点,其取决于MIMF在感兴趣区域A的滤波响应局部极值点:
∉Γk},
(2)
其中,f(i,j)为输入图像, (i,j)k表示第k个局部极值点的坐标,Γk为去除决定极值附件区域后的部分,Φ[f(i,j),ρ(i,j)]为点(i,j),尺度为ρ(i,j)的滤波函数,满足:
Φ[f(i,j),ρ(i,j)]=e(i,j,ρ)-α·d(i,j,ρ)-β·c(i,j,ρ),
(3)
c(i,j,ρ)为当前图像块存在的可能性估计,α,β为约束系数.直接利用(2)式检测的极值点并不都满足稳定、唯一性和不变性.因此,需要对得到的极值点进行进一步筛选以获得具有尺度、旋转、平移不变性且定位准确、鲁棒性好的特征点.
1.2 基于高斯差分函数的SIDs特征点提取
SIDs特征点的提取是通过搜索MIMF滤波响应值的空间极值点而获得的,而高斯差分函数(Difference of Gaussian,DOG)计算简单,且检测出的特征点稳定性好,因此,为增强匹配的稳定性、提高抗噪声能力,在提取极值点的过程中利用高斯差分函数的泰勒展开式,通过线性插值来寻找稳定且定位精确的极大值点作为最终的特征点.

1.3 结合区域选择的MSER特征检测与匹配
一个极值区域实际上就是一个像素间存在四邻域关系的像素集,且该区域内的所有像素的灰度值都大于或小于区域边界像素点的灰度值.MSER是一种基于灰度的区域检测算子,其对光照、视角变化均具有较好的适应性.通常利用MSER可得到许多不同大小的最大稳定极值区域,而面积过大或者过小的区域独特性较差,同时,得到的特征区域数量往往较大,且存在交叠嵌套,若直接用这些区域进行匹配,不但消耗大量时间,也容易产生误匹配,为此,本文在利用MSER特征区域时,对其进行了筛选,设Q为筛选区域,QΓ为MSER特征区域,Q=ø,∀Qi⊂QΓ,记Qi为Q中与Q∩Qi连通区域,则:Forj=1:Γ
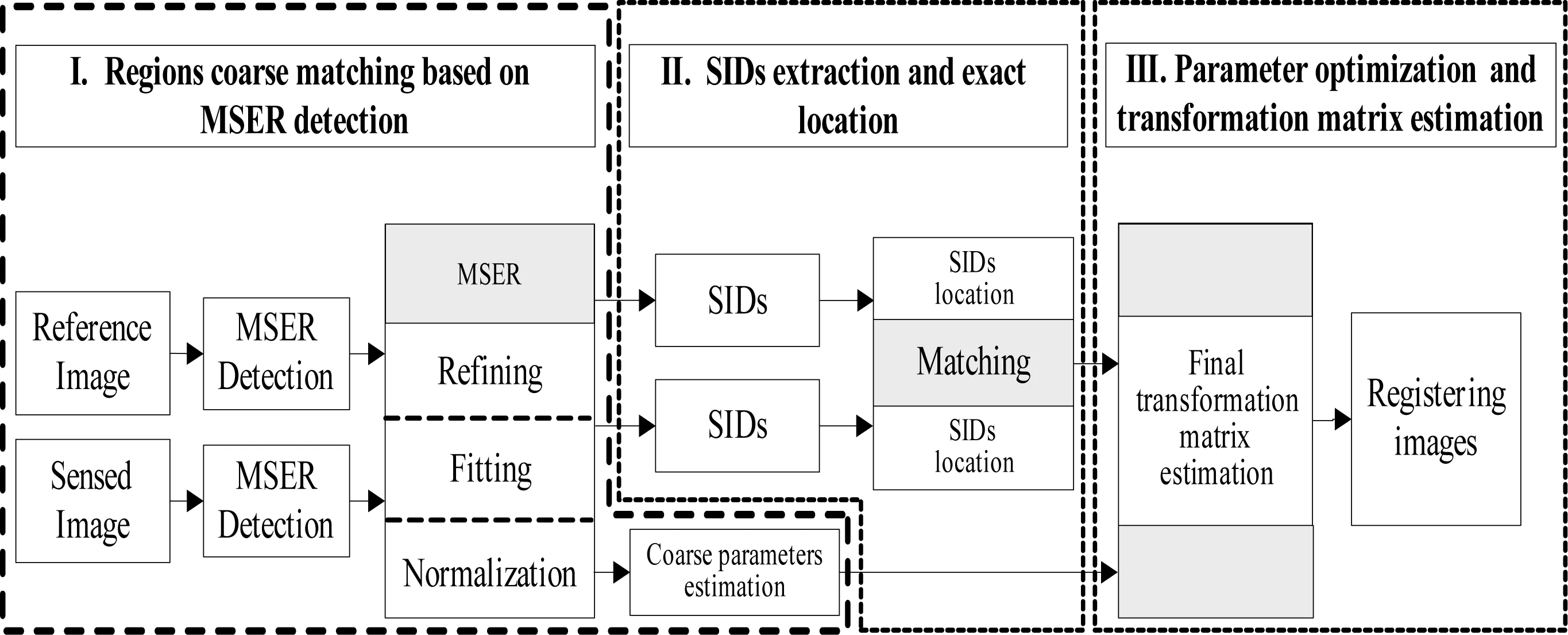
IfQmin IfQ∩Qj=ø,Q={Q,Qj}; Else ifQi⊂Qj,则Q={QQi,Qj}; Else ifQj⊂Qi,则Q=Q; Else ifQi⊄Qj,Qj⊄Qi,|Qi(Qi∩Qj)|≤|Qj(Qi∩Qj)| if |Qj(Qi∩Qj)|≤|Qi(Qi∩Qj)|+δ,Q={QQi,Qj}; ElseQ={Q,Qj(Qi∩Qj)}; Else ∬∥Qi⊄Qj,Qj⊄Qi,|Qj(Qi∩Qj)|≤|Qi(Qi∩Qj)| if |Qi(Qi∩Qj)|≤|Qj(Qi∩Qj)|+δ,Q=Q; ElseQ={Q(Qi∩Qj),Qj}; end 从而获得大小均匀、一致性好的区域,且满足: Qmin (4) 其中,Qmin,Qmax分别为最小、最大区域面积阈值,δ∈R+为常数,Γ为MSERs特征数量. 图1 椭圆形区域的归一化 MSER特征区域往往具有任意不规则形状,因而难以进行特征描述,数学上,协方差可以度量连个特征向量在相同方向上的改变趋势,对应几何上特征的椭圆分布,协方差越大,相椭圆也就越扁,对应的特征向量都聚集在主轴附近.文献[12]将(0,1)T作为仿射归一化变换的特征向量,提出了一种基于LO-RANSAC的快速仿射变换算法,获得了自由度受限的仿射变换参数.文献[13]具体给出了仿射归一化过程,如图1所示,首先将MSER区域表征成椭圆形区域,同时对其扩展到较大的椭圆形测量区域,二者中心一致,且测量区为拟合椭圆的μ倍,一般取μ=3,再将测量区归一化到指定大小的圆形区域即归一化区域. 在得到归一化的圆形区域之后,原始区域的识别与匹配就转化为归一化的圆形区域的识别,本文采用类似SURF[14]描述子的方法来建立区域特征描述向量即将归一化圆形划分成4×4的子块,计算各子块图像各点的Haar小波在x、y方向的响应,同时使用高斯加权函数对响应值进行加权,统计响应值∑dx,∑|dx|,∑dy,∑|dy|形成特征向量. 基于特征的图像配准算法主要包括特征提取、特征匹配、变换参数估计及重采样配准图像4个步骤,其中,特征提取与匹配是基于特征配准算法的关键.本文将MSER区域特征与SIDs特征点相结合,构造了一种具有仿射不变性的图像配准算法,主要流程如图2所示. 图2 结合SIDs与MSER特征的遥感图像配准算法 图3 本文算法处理结果:(ai)参考图像;(bi) 待配准图像;(ci) 区域匹配;(di) 配准结果(i=1,2) Group 1ASIFTSIDsISIDs Group 2 ASIFTSIDsISIDs T (s)72.786 91614.310 7868.461 195108.103 23818.857 259.020 056 NC/NT1 849/1 9162/43 057/3 2293 982/4 00579/841 800/1 849 R96.5050.0092.6699.4394.0597.349 9 RMES2.365 2-0.732 01.174 83.884 30.611 5 注:“-”表示算法失效. 从配准精度RMSE值来看,本文算法RMSE值均小于1,配准精度提升明显,一方面是因为MSER区域特征计算简单,同时在粗匹配阶段对其进行了筛选归并,排除了相似区域的干扰,使得粗匹配参数更加精确可靠;另一方面,利用高斯差分函数提取MIMF滤波响应极值点,并去除了不稳定和低对比度的响应极值点,从而获得更加精准的特征点. 图4 光照变化对不同算法配准结果的影响 在获取图像过程中,不同光照会影响采样量化,因而得到的灰度值常存在差异,细微的光照变化可能对应图像灰度值的细微变化,而这种细微的灰度变化很可能对配准结果产生较大影响,甚至导致最终配准算法失效,因此,配准算法能适应光照变化,尤为重要,为分析本文算法对光照变化的敏感程度,随机选取了11组在不同光照强度下采集的图像进行配准实验,并以最小均方根误差(RMSE)为指标定量分析了SIDs算法和本文算法配准的精确程度,如图4所示,从图4中可以看到不同光照强度,SIDs特征点配准的误差曲线波动较大,RMSE值变化范围较大,而改进后 SIDs方法则相对平缓,变化区间较小,这是因为高斯核函数,能更好反应真实情况的局部极值变化情况,从而在尺度空间内检测出较稳定的极值点,提高了特征点定位的精确性和可靠性. 针对不同特性的图像,选择图像中易于提取且能够在一定程度上代表图像相似性的特征,可实现高精度、快速有效的配准.SIDs特征易于提取且稳定可靠,反映了图像的灰度特性,而MSER检测算子具有仿射不变性、计算简单高效.本文将二者结合,一方面兼顾了点特征对位置变化敏感和MSER区域特征的仿射不变性,另一方面也避免了单一特征在较大视角变化下的图像配准时难以保证较高精度的缺陷.此外,在区域匹配时,对MSER区域特征进行了筛选归并,减少了相似区域的干扰,利于提高配准效率和精度.文中采用的特征是基于灰度提取的,对于存在较大灰度差异的图像配准问题,如何进一步提升配准精度和算法的稳定性将是下一步研究的重点.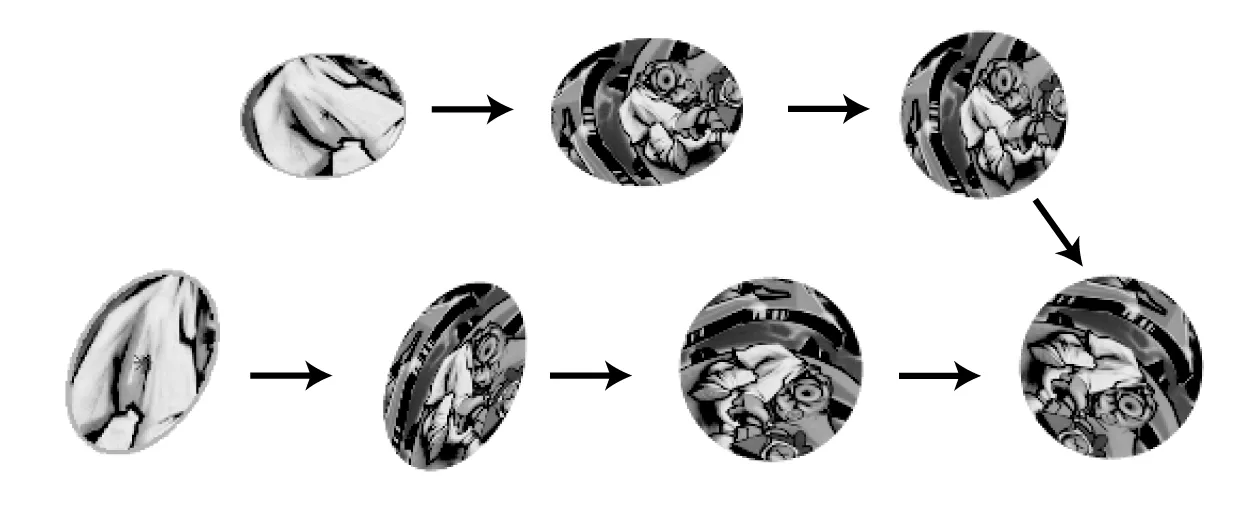

2 本文算法步骤
3 实验结果及分析




4 结论
猜你喜欢
北京航空航天大学学报(2022年6期)2022-07-02新世纪智能(数学备考)(2021年10期)2021-12-21新世纪智能(数学备考)(2021年10期)2021-12-21天津医科大学学报(2021年1期)2021-01-26河北理科教学研究(2020年3期)2021-01-04语数外学习·高中版中旬(2020年10期)2020-09-10小天使·二年级语数英综合(2019年4期)2019-10-06小学生学习指导(低年级)(2019年6期)2019-07-22自动化学报(2017年5期)2017-05-14电影故事(2015年16期)2015-07-14
