直达与非直达环境中的多目标解耦直接定位方法
2018-03-15 10:14尹洁昕王鼎吴瑛刘瑞瑞
航空学报 2018年2期
尹洁昕,王鼎,吴瑛,刘瑞瑞
解放军信息工程大学 信息系统工程学院,郑州 450001
无源定位在无线通信、遥测与导航等诸多工程科学领域具有广泛应用。现有定位技术主要是基于到达时间(Time of Arrival,TOA) 、到达角度(Direction of Arrival,DOA)等参数进行定位,这些定位技术对接收端是否有非直达(Non-Line-of-Sight,NLOS)径信号非常敏感。非直达径的存在会带来TOA与DOA等测量参数的偏差,从而对定位结果造成影响。然而,在很多环境中,用以目标位置解算的测量参数都不是仅在信号直达(Line-of-Sight,LOS)情况下获得的,因此,研究LOS与NLOS混合环境中的定位方法具有重要意义。
传统的定位技术分为两步进行,第一步先从原始信号抽样中估计定位参数(例如DOA与TOA等),第二步是基于这些参数进一步确定目标的位置信息[1]。当非直达径存在时,两步定位方法需要解决两方面问题:NLOS识别与NLOS影响消除[2]。前者用于确定测量结果是否受到非视距影响,后者利用定位算法抑制 NLOS造成的误差。现有消除NLOS影响的两步定位算法一般可以分为两类:统计方法与参数化方法[3]。统计方法[4]将NLOS误差看做具有一定统计特性的偏差,辨识NLOS观测量后,根据其概率分布或者其他先验统计特性,利用鲁棒的方法如鲁棒最小二乘算法等[5-6]以消除NLOS误差的影响;参数化方法[3,7]综合考虑信号的传播路径和障碍物或反射体的状态,利用定位场景的几何分布实现NLOS存在下的定位,其中障碍物或反射体的位置信息一般依靠预先精确测量的电子地图等[8-9],有时与目标位置联合估计得到。相比于统计方法,参数化方法能够充分利用信号在多径场景中的传播特性,在LOS观测量较少的情况下可以获得更高精度的定位结果。
然而,NLOS两步定位技术存在以下不足:首先,从信息论的角度来看,两步定位体制难以获得渐近最优的估计精度,因为从原始数据到最终估计结果之间每增加一步处理环节,就会损失掉一部分信息,从而影响最终的定位精度,在低信噪比和小样本数条件下该现象尤为明显;其次,NLOS判别的准确与否,以及“目标-量测”的数据关联正确与否都会直接影响最终的定位精度,而如何将信号测量参数与目标的直达径、非直达径进行准确关联又是一个具有高复杂度且不易实现的问题[10]。
为了解决传统两步定位技术的不足,目标直接定位(Direct Position Determination,DPD)技术[11]被国内外学者所关注。这种目标直接定位方法的基本思想是从原始信号抽样中直接估计目标的位置信息,而无需再估计其他中间参量,如DOA与TOA等参数,因此也可称其为单步定位体制。大量文献已经验证[12-21]:DPD定位方法比传统两步定位方法具有更高的估计精度和更低的分辨门限,并且能够有效避免数据关联问题。然而,当前针对LOS与NLOS混合环境中的无源直接定位方法研究并不多,文献[10]提出了一种基于时域信号处理的子空间类方法,该方法通过利用时域信号的部分先验信息以及反射体的位置信息,建立了关于多目标位置的MUSIC (MUltiple SIgnal Classification)函数,从而实现对多目标的直接定位。因该方法利用了子空间思想,在低信噪比情况下性能下降,无法达到相应的克拉美罗界(Cramér-Rao Bound, CRB)。文献[16-17]分别利用单个运动阵列和单个静止阵列作为接收站,同时设置多个转发器作为理想反射体,通过利用多径信号到达角度与时延关于观测站、反射体与目标位置参数的数学关系,在信号波形已知和未知两种情况下建立了最大似然函数用以实现对单个目标的直接定位。最大似然类方法能够逼近相应的CRB,但是文献[16-17]中的方法仅涉及单个目标场景,而实际中多个目标经常同时存在,对多个目标进行最大似然直接定位往往需要高维搜索或者非线性迭代,因此有必要研究更加普遍且更加复杂的直达与非直达环境中的多目标直接定位问题。
基于上述研究现状,本文针对LOS与NLOS混合场景中的定位问题,提出了一种波形已知条件下的单站多目标直接定位算法。定位系统采用单个静止阵列为观测站,类似于文献[10,16-17],本文也利用了多径信号到达角度与时延关于观测站、障碍物(或反射体)与目标位置参数的数学关系;不同的是,本文对三维的定位场景进行研究,并且建立了关于多个目标位置的最大似然函数。这里考虑了发射时间已知和未知两种情况,为了简化计算,通过利用已知的波形信息,将多个目标位置的求解问题解耦为对各个目标单独求解,避免了多目标定位中的高维非线性优化问题。由于本文算法增加利用了目标信号波形信息,因此其定位精度优于未充分利用波形信息的子空间DPD算法[10]。此外,本文对所提算法与其他已有算法的计算量进行了对比分析,并基于LOS与NLOS混合环境中的多目标定位场景,推导了发射时间已知和未知两种情况下关于目标位置的CRB。
本文的内容安排如下:第1节针对LOS与NLOS同时存在的定位场景,给出了多目标的三维定位模型;第2节建立了算法的数学优化模型并设计了多目标的解耦算法;第3节对比分析了本文算法与已有算法的计算量;第4节推导了多径环境中关于多个目标位置估计的CRB;第5节通过仿真将本文算法的定位性能与传统两步定位方法、基于子空间的多目标DPD算法进行了对比与分析;第6节对全文进行了总结。
1 三维多目标定位模型
假设有一个观测站位于uo,由某M元天线阵列组成。现有Q个静止稳态的待定位的远场目标源发射窄带信号,其中第q个目标辐射源的位置向量为pq(q=1,2,…,Q)。目标区域内有NR个障碍物(或反射体),假设他们的位置已知,用向量un(n=1,2,…,NR)表示。目标区域内障碍物的存在导致Q个目标的发射信号除了直达径,同时存在非直达径传输,令Lq(Lq≤NR+1)表示第q个信号到达该观测站的多径数。由于多跳信号的功率很小,本文考虑单跳的NLOS场景[3,18],该定位场景示意图如图1所示。
根据上述定位场景,信号到达观测阵列各个阵元的时延由两部分组成[10,16]:一部分是阵元间时延差,即信号到达各个阵元相对于观测阵列参考点的时延,由于本文所研究的是远场窄带信号,该时延差体现为载波的相位偏移,它与到达角度有关,包含在阵列流型响应中;另一部分是路径传播时延,即信号从目标位置经过直达径或者非直达径到达观测阵列参考点的时延,它体现为信号包络的时延,其大小与传播路径长度成正比,与到达角度没有强相关性。

(1)
式中:r为均匀圆阵的半径;c为电波传播速度。
第q个目标辐射源经由第l条径所产生的阵列流型响应a(θq l,φq l)可以表示为[22]

(2)
式中:fc为发射载频。

图1 直达与非直达混合环境中的多目标定位场景Fig.1 Multiple targets positioning scenes in mixed LOS/NLOS environments

(3)
τq l所表示传播时延的相应路径如图1所示(以目标1的传播路径为例)。
那么,在0≤t≤T时刻观测阵列的输出响应r(t)可以表示为[10]
(4)

将观测阵列接收到的信号分为K段,每段长度为T/K,对每段数据在t=jTs(j=1,2,…,J)时刻进行采样,Ts为采样周期,得到第k段采样数据的时域信号表示为
r(j,k)=
k=1,2,…,K;j=1,2,…,J(5)

为了提取信号的时延信息,对每段采样数据r(j,k)分别做离散傅里叶变换,得到相应的频域信号表示为
k=1,2,…,K;j=1,2,…,J(6)
由于直达径的DOA与TOA,以及非直达径的TOA均与目标的位置信息有关,而非直达径的DOA与TOA与障碍物或反射体的位置也相关,这里将他们之间的具体关系为
(7)

k=1,2,…,K;j=1,2,…,J(8)
式中:
Aq(j,pq)=
(9)
αq=[αq0αq1…αq(Lq-1)]T∈CLq×1
(10)
进一步,将式(8)写为更简洁的矩阵形式:

k=1,2,…,K;j=1,2,…,J(11)
式中:
(12)
2 多目标的解耦定位
在目标信号波形信息先验已知的条件下,本节将给出基于最大似然(Maximum Likelihood,ML)准则的目标位置最优估计。分为两种情况分析:发射时间精确已知与发射时间未知。
2.1 发射时间已知

(13)

(14)

由于未知参数中包含了多个目标的信息,直接对式(14)求解将是一个高维的非线性优化问题,因此本文利用已知且独立的波形信息对多个目标进行解耦求解。类似文献[19]的推导过程,可以将式(14)的最小化等价为对式(15)的最小化:

(15)

(16)

(17)
(18)
那么,利用式(17)和式(18),将高维的非线性优化问题转化为Q个较低维的优化问题,对第q个目标有关参数的求解即为
q=1,2,…,Q
(19)
式中:
(20)
其中:
(21)
利用嵌入式优化的思想优化目标式(19),首先固定目标位置来估计αq,计算目标函数Vq(p,α)对α的共轭梯度为
(22)
(23)
接着将式(23)代入到式(20)中,可得
(24)
式(24)中的第一项与待估计参数无关,可将其省略。因此,在发射时间已知的情况下,对pq的估计为
q=1,2,…,Q(25)
其中:
(26)
2.2 发射时间未知

(27)
式中:
(28)
由于to的存在,若直接对式(28)进行搜索求解,计算量较大,因此这里将推导目标函数的近似求解来进一步降低计算量。将式(28)进一步写为
(29)
(30)
至此,将目标位置和发射时间的目标函数近似为了只与位置有关的函数。那么,令
[F(p)]:,j=
(31)
在发射时间未知情况下,对目标位置的估计为
q=1,2,…,Q(32)
式中:
(33)
其中:‖·‖1为矩阵的L1范数。
2.3 讨 论
根据上述推导,在发射时间已知和未知两种情况下,均能通过在目标区域内的三维搜索实现对每个目标的定位。需要指出的是,在实际中当目标的多径数未知时,目标区域内的障碍物个数可由电子地图预先获得,在求解过程中可将Aq(J,p)用如下矩阵代替:
AR(J,p)=
(34)
因此,相比于传统两步定位方法,本文给出的直接定位算法无需对多径数进行估计,并且避免了对NLOS观测量的识别,具有天然的抗伪径作用,即能够有效克服传统定位方法中对多径数量的过估计[10]所带来的误差。
此外,这里对定位系统的可观测性进行分析。针对发射时间已知的情况,对于第q个目标,能够获得的有效定位参数包括直达径的二维DOA与各径到达接收站的TOA(非直达径的DOA与目标位置无关,不能增加定位信息量),参数的维数为Lq+2;未知参数为三维目标位置pq,维数为3。为了保证参数的可辨识性,已知参数的维数不能低于未知参数的维数,即需要满足:
Lq≥1
(35)
此时,观测站只要接收到目标的直达径信号,就能保证定位系统的可观测性。

Lq≥2
(36)
式(36)说明,在发射时间未知的情况下,观测站至少要同时接收一条直达径与一条非直达径信号,以保证定位系统的可观测性。事实上,当发射时间未知时,虽然无法完全利用所有径的传播时延信息,但可以损失一条路径的传播时延来获得其他径与它的到达时间差信息。
3 计算量分析
为了简化问题,本节在对复杂度的统计中假设Lq已知,且NLOS参数识别以及每条径的TOA/DOA数据关联正确,不考虑Lq的估计以及两步定位中数据关联的复杂度。由于对目标位置搜索的网格个数一般远远大于阵元数、频率分量个数等参数,因此这里忽略对目标位置网格搜索前的数据处理计算量,主要考虑对目标位置搜索过程的计算量,以实乘运算个数来表征计算量的大小[17]。基于此,本节针对发射时间已知的情况,统计了本文DPD算法与传统两步定位方法(TOA、DOA参数估计与定位解算均采用ML算法)的计算量;针对发射时间未知的情况,统计了本文DPD算法、子空间DPD算法[10]以及传统两步定位方法的计算量。相应的计算量表达式如表1所示。
为了更加直观地比较几种算法的计算量,利用文献[20]的方法,假设目标搜索范围在d×d×d的区域内,每个坐标方向的网格大小为Δd,那么目标位置搜索网格数为
(37)
在两步定位中,为了实现相同的目标位置搜索精度,相应的方位角搜索网格、俯仰角搜索网格以及时延搜索网格大小约为[20]
(38)
假设对Δθ的搜索在π范围内,对Δφ的搜索在π/2范围内,对Δτ的搜索在d/c范围内,结合式(37)与式(38),可以得到Nθ、Nφ、Nτ与Np之间的关系为
(39)
将式(39)代入表2各个算法的计算量表达式中,能够得到对比算法与本文算法计算量之间的关系。
在发射时间已知条件下,两步定位方法与本文算法的计算量之比为
(40)
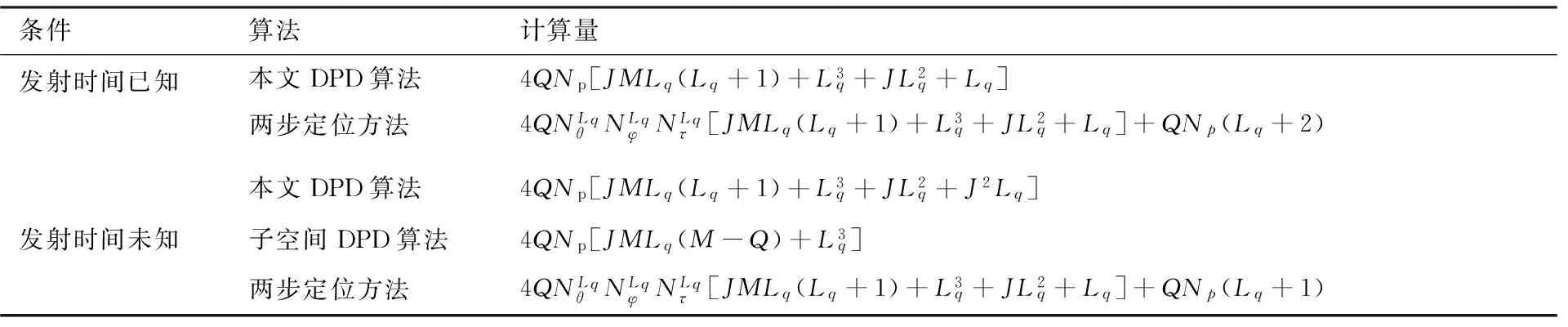
表1 计算量对比Table 1 Comparison of computations
注:Np、Nθ、Nφ和Nτ分别表示搜索目标位置的网格个数、搜索方位角的网格个数、搜索俯仰角的网格个数以及搜索时延的网格个数;M为阵列中阵元个数。
在发射时间未知条件下,子空间DPD算法与本文算法的计算量之比为
(41)
同样在发射时间未知条件下,两步定位方法与本文算法的计算量之比为
(42)
因此,从式(41)可以看出本文算法与子空间DPD算法的计算量相当。根据2.3节的讨论可知,在发射时间已知条件下,需要Lq≥1,那么式(40)说明本文算法比两步定位方法的计算量更低;在发射时间未知条件下,需要Lq≥2,由于Np一般远远大于其他参数,那么式(42)说明该情况下本文算法仍比两步定位方法具有更低的计算量。综上,相比于传统的两步定位方法,本文算法所需的计算量更低,更易于实现。
此外,还能得到本文算法在发射时间未知和发射时间已知情况下的计算量之比为
(43)
该结果说明未知的发射时间会带来计算量的增加,从式(43)可以看出该计算量的增加并不多,这是由于本文对未知发射时间条件下的目标函数进行了有效近似。
4 性能界
由于本文关注对多目标的直接定位,本节将推导发射时间已知和未知两种情况下多个目标位置估计的克拉美罗界,为评价算法的定位性能提供理论标准。
针对波形已知发射时间未知的情况,将所有未知实参量用矢量ρ表示,即为
(44)

基于本文的频域阵列信号模型(式(11)),根据文献[21],对参数ω估计的CRB可以通过式(45)计算得到:
CRB(ω)=
(45)
令
(46)
可以将式(45)改写为
(47)

(48)
进一步,将Γω作如下分块:
(49)
本节目标是得到仅关于目标位置的CRB,由于式(48)中的CRB(ω)没有对角结构,不容易直接计算关于目标位置的性能界。为了获得具有对角结构的CRB表达式,这里将未知参量ω作如下重新排列:
(50)
式中:
(51)
其中:{·}†表示矩阵的Moore Penrose逆。矢量ω′与ω的关系为
ω′=Jω
(52)
式中:

(53)
由文献[23]中证明的定理,可得矢量ω′的CRB为
CRB(ω′)=JCRB(ω)JT=
(54)
利用式(51)与式(53)可得
(55)
将式(51)代入式(55)中,再联合式(49),有
(56)

(57)
式中:
(58)
至此,式(57)中的CRB具有对角结构,那么在波形已知发射时间未知情况下,关于目标位置的CRB表达式为
(59)
针对波形已知发射时间已知的情况,类似于上述推导,可以计算出相应场景下仅关于目标位置估计的CRB为
(60)
对比式(59)与式(60),不难得到:
(61)
即未知的发射时间将导致定位精度降低。
5 仿真与结果分析
为了验证本文所提直接定位方法性能的优越性,该部分通过数值仿真将以下3种算法与本文算法的定位性能进行对比:
1) 基于子空间的多目标直接定位算法[10],没有充分利用先验已知波形,无需发射时间信息。
2) 基于DOA与TOA的传统两步定位算法,波形先验已知但发射时间未知,假设NLOS参数识别以及每条径的TOA/DOA数据关联正确。
3) 基于DOA与TOA的传统两步定位算法,波形先验已知且发射时间已知,假设NLOS参数识别以及每条径的TOA/DOA数据关联正确。
此外,将给出本节推导的CRB曲线,以作为评价定位性能的标准。仿真中,由于本文针对三维定位场景,考虑均匀圆阵可获得二维角度信息,是实际中一种常用的阵列,且可实现360°全方位无模糊观测,因此观测站采用10元均匀圆阵接收目标信号,半径为1.5λ(λ为目标信号波长),坐标位置为uo=[0 0 0]Tkm。假设目标范围内有一个位于u1=[-1 2 2]Tkm的障碍物,由于本文旨在研究多目标定位,不失一般性,这里考虑有两个目标分别位于p1=[1 2 3]T·d,p2=[2 3 1]T·d,每个目标都经过一条直达径和一条非直达径(由障碍物反射)到达观测阵列。令d从0.6 km变化至2.0 km,表2与表3中列出了不同d取值下,两个目标的直达径与非直达径的二维角度与路径传播时延的参数值,其中方位角为信号到达阵列的方向与Y轴方向的顺时针夹角,俯仰角为信号到达阵列的方向与X-Y平面的夹角。从两个表中可以看出,随着d的变化,两个目标各条径的二维角度保持不变,但是路径传播时延随着d的增加而增大,这是因为在d的变化过程中,各条径相对于观测阵列的入射方向没有变化,但是传播路径越来越长。因此,该结果说明路径传播时延参数与角度参数没有强相关性。

表3 目标1在不同位置条件下直达径与非直达径的到达角度与路径传播时延参数Table 3 DOAs and TOAs of LOS/NLOS paths with different position for Target 1
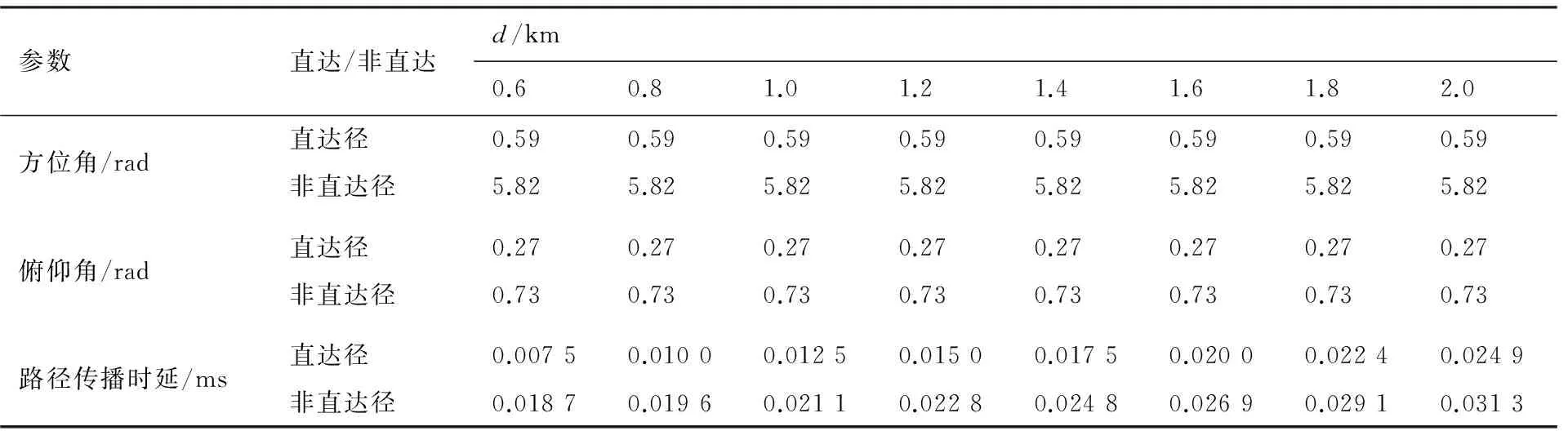
表4 目标2在不同位置条件下直达径与非直达径的到达角度与路径传播时延参数Table 4 DOAs and TOAs of LOS/NLOS paths with different position for Target 2
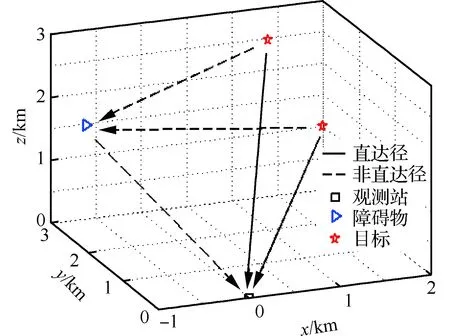
图2 直达与非直达混合环境中的两目标定位场景Fig.2 Localization of two targets scenes in mixed LOS/NLOS environments
根据上述结论,考虑本文的直接定位算法无需计算角度与路径传播时延参数而直接估计目标位置,在下述仿真中假设两个目标位于p1=[1 2 3]Tkm,p2=[2 3 1]Tkm,每个目标都经过一条直达径和一条非直达径到达观测阵列,障碍物位于u1=[-1 2 2]Tkm,具体定位场景如图2所示。参照文献[24]中的多径场景参数,假设两个目标的直达径传播系数幅度均为1,非直达径传播系数幅度分别为0.5和0.7,传播系数相位在[0,2π]范围内随机选取。仿真中,目标基带信号采用滚降系数为0.25的QPSK(Quadrature Phase Shift Keying)信号,发射载频fc=100 MHz,下变频后的采样率为40 kHz,每码元4倍采样,定位利用K=40段数据,每段数据包含J=8个频率分量,噪声为高斯白噪声。实验进行3组,依次研究算法性能对噪声的鲁棒性,发射时间对定位性能的影响,以及算法性能对相关信号的鲁棒性。每组实验的蒙特卡罗仿真次数均为500次,定位性能以位置估计的均方根误差(Root Mean Square Error,RMSE)来衡量,统计方式为
(62)

5.1 定位性能对噪声的鲁棒性
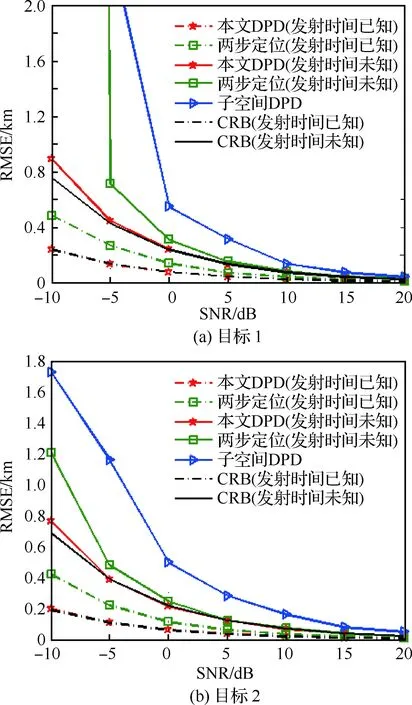
图3 定位误差与CRB随信噪比的变化曲线Fig.3 Curves of RMSE and CRB vs SNR
5.2 发射时间对定位性能的影响
本节将研究发射时间大小对定位性能的影响,同样将本文算法与几个对比算法的估计性能作对比。两个目标信号独立,令他们的发射时间分别为
(63)
式中:δt为发射时间变化幅度。在信噪比为5 dB的条件下,将δt从0.1 ms变化至1.9 ms,依次统计在各个发射时间条件下算法的定位RMSE,相应结果如图4所示。图中的曲线显示发射时间已知有助于提升算法性能,但是各个算法的定位性能与发射时间的大小并没有明显关系。无论发射时间多大,发射时间已知情况下本文算法的定位精度始终是最优的,而基于子空间的DPD算法的定位误差是最大的,甚至比发射时间未知情况下的两步定位算法精度更低,这是因为基于子空间的DPD算法没有充分利用信号的波形先验信息。
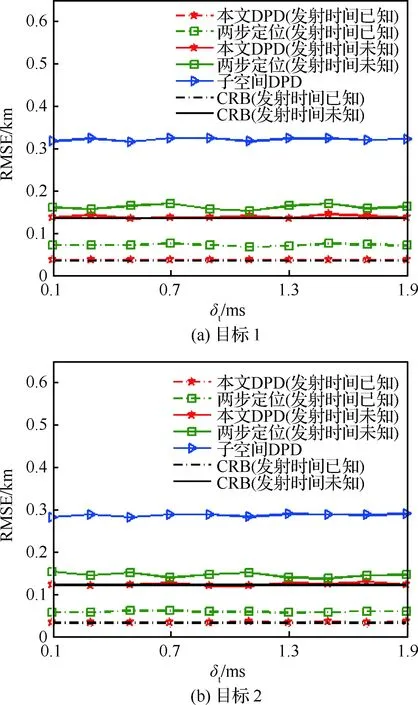
图4 定位误差与CRB随发射时间的变化曲线Fig.4 Curves of RMSE and CRB vs transmission time
5.3 定位性能对相关信号的鲁棒性
虽然本文的解耦方法是基于信号间相互独立的假设,本节将对本文算法在相关信号条件下的性能如何进行研究。将信噪比固定在5 dB,当两个目标发射信号的相关系数从0~0.9变化时,图5给出了本文算法与对比算法的定位性能曲线。从图中可以看出,相关系数对发射时间已知和未知两种情况下的CRB影响很小;随着信号相关性的增强,本文算法与其他对比算法的定位性能都有明显下降,但是子空间DPD算法对相关系数最为敏感,强相关信号导致子空间性能恶化;在发射时间已知条件下,本文算法的性能受信号相关性影响较小,它的定位精度明显优于发射时间已知条件下的两步定位算法;在发射时间已知和未知两种情况下,当目标信号相关系数较强时,本文算法的定位精度均优势明显。
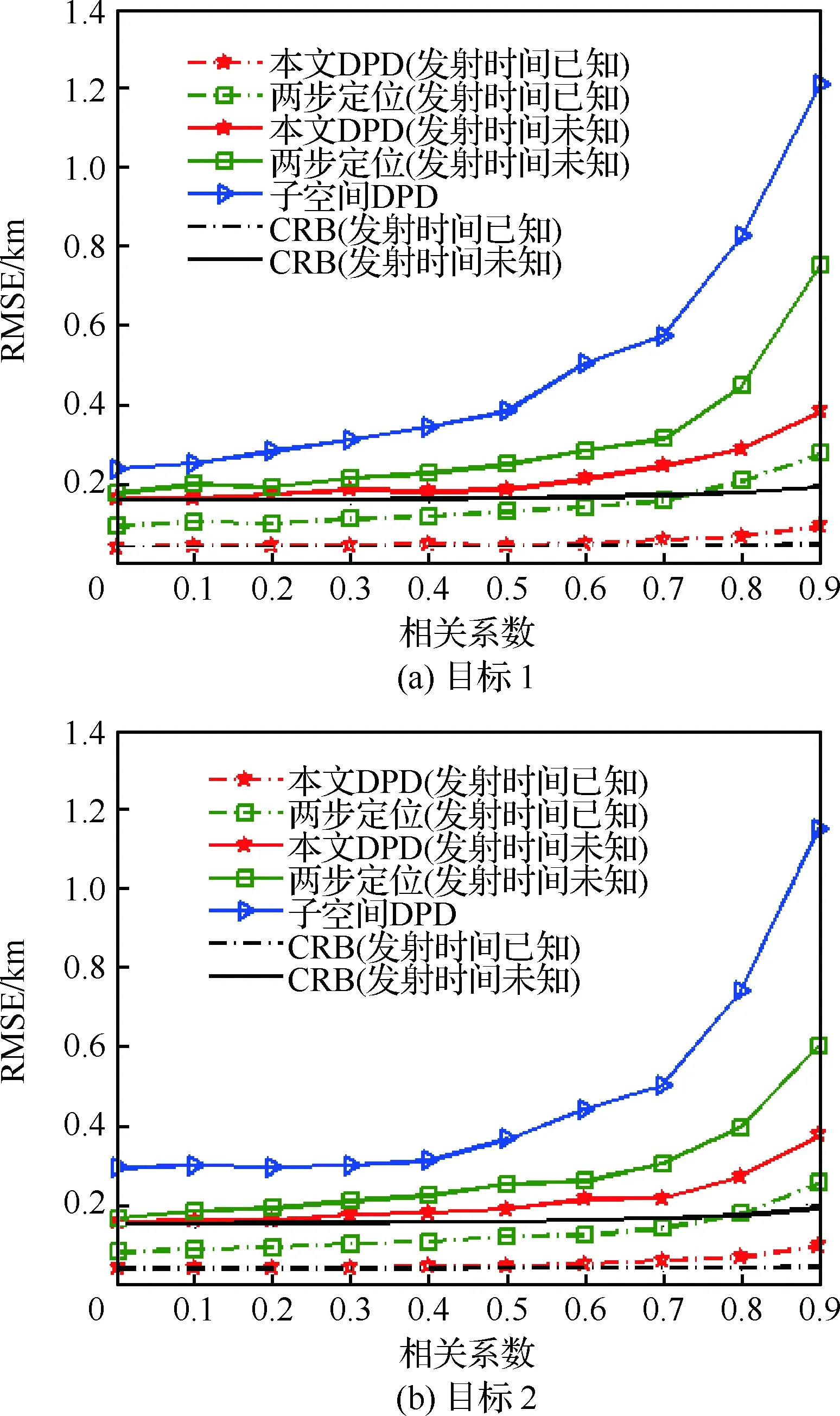
图5 定位误差与CRB随信号相关系数的变化曲线Fig. 5 Curves of RMSE and CRB vs correlation coefficients
6 结 论
1) 本文针对发射时间已知和未知两种情况,利用独立的已知波形信息,提出了一种直达与非直达混合环境中的单站多目标解耦直接定位算法。
2) 本文基于多径定位场景,推导了发射时间已知和未知两种情况下的多目标位置估计的CRB。
3) 本文算法与传统两步定位方算相比,无需估计中间测量参数,避免了NLOS识别与数据关联问题,具有更低的计算复杂度。
4) 本文算法在发射时间已知情况下的定位性能明显优于发射时间未知的情况,但发射时间的取值大小对定位性能没有影响。
5) 本文算法的定位性能在发射时间已知和未知两种情况下均可以逼近相应的CRB,相比于传统两步估计定位算法和已有的多目标DPD算法,它具有更高的定位精度,尤其在信噪比较低和目标信号相关性较强时,该优势更加明显。
[1] 王鼎, 张刚, 沈彩耀, 等. 一种针对恒模信号的运动单站直接定位算法[J]. 航空学报, 2016, 37(5):1622-1633.
WANG D, ZHANG G, SHEN C Y, et al. A direct position determination algorithm for constant modulus signals[J]. Acta Aeronautica et Astronautica Sinica, 2016, 37(5): 1622-1633 (in Chinese).
[2] 赵卫波, 巴斌, 胡捍英, 等. 多天线NLOS定位误差抑制算法[J]. 信号处理, 2013, 29(7): 873-879.
ZHAO W B, BA B, HU H Y, et al. Multi-antenna NLOS location error mitigation algorithm[J]. Journal of Signal Processing, 2013, 29(7): 873-879 (in Chinese).
[3] SHIKUR B Y, WEBER T. TDOA/AOD/AOA localization in NLOS environments[C]∥IEEE International Conference on Acoustics, Speech and Signal Processing. Piscataway, NJ: IEEE Press, 2014: 6518-6522.
[4] 周杰, 刘鹏, 黄雷, 等. 室内直达与非直达环境无线传播综合信道建模[J]. 物理学报, 2015, 64(17): 56-65.
ZHOU J, LIU P, HUANG L, et al. Indoor wireless propagation under line of sight and no line of sight comprehensive channel modeling[J]. Acta Physica Sinica, 2015, 64(17): 56-65 (in Chinese).
[5] ZHANG S, GAO S, WANG G, et al. Robust NLOS error mitigation method for TOA-based localization via second-order cone relaxation[J]. IEEE Communications Letters, 2015, 19(12): 1-4.
[6] WANG G, SO M C, LI Y. Robust convex approximation methods for TDOA-based localization under NLOS conditions[J]. IEEE Transactions on Signal Processing, 2016, 64(13): 3281-3296.
[7] WANG Z, ZEKAVAT S A. Omnidirectional mobile NLOS identification and localization via multiple cooperative nodes[J]. IEEE Transactions on Mobile Computing, 2012, 99(12): 2047-2059.
[8] SONG H B, WANG H G, HONG K, et al. A novel source localization scheme based on unitary esprit and city electronic maps in urban environments[J]. Progress in Electromagnetics Research, 2009, 94(4): 243-262.
[9] KIKUCHI S, SANO A, TSUJI H. Blind mobile positioning in urban environment based on ray-tracing analysis[J]. EURASIP Journal on Advances in Signal Processing, 2006(1): 1-12.
[10] DEMISSIE B. Direct localization and detection of multiple sources in multi-path environments[C]∥Proceedings of the International Conference on Information Fusion. Piscataway, NJ: IEEE Press, 2011: 1-8.
[11] WAX M, KAILATH T. Optimum localization of multiple sources by passive arrays[J]. IEEE Transactions on Acoustics Speech and Signal Processing, 1983, 31(5): 1210-1217.
[12] TIRER T, WEISS A J. High resolution direct position determination of radio frequency sources[J]. IEEE Signal Processing Letters, 2016, 23(2): 192-196.
[13] 张敏, 郭福成, 周一宇.基于单个长基线干涉仪的运动单站直接定位[J]. 航空学报, 2013, 34(2): 378-386.
ZHANG M, GUO F C, ZHOU Y Y. A single moving observer direct position determination method using a long baseline interferometer[J]. Acta Aeronautica et Astronautica Sinica, 2013, 34(2): 378-386 (in Chinese).
[14] WANG D, WU Y. Statistical performance analysis of direct position determination method based on Doppler shifts in presence of model errors[J]. Multidimensional Systems and Signal Processing, 2015, 28(1): 1-34.
[15] 张敏, 郭福成, 周一宇, 等.运动单站干涉仪相位差直接定位方法[J].航空学报, 2013, 34(9): 2185-2193.
ZHANG M, GUO F C, ZHOU Y Y, et al. A single moving observer direct position determination method using interferometer phase difference[J]. Acta Aeronautica et Astronautica Sinica, 2013, 34(9): 2185-2193 (in Chinese).
[16] BAR-SHALOM O, WEISS A J. Transponder-aided single platform geolocation[J]. IEEE Transactions on Signal Processing, 2013, 61(5): 1239-1248.
[17] BAR-SHALOM O, WEISS A J. Emitter geolocation using single moving receiver[J]. Signal Processing, 2014, 105(12): 70-83.
[18] PAPAKONSTANTINOU K, SLOCK D. Direct location estimation using single-bounce NLOS time-varying channel models[C]∥Vehicular Technology Conference. Piscataway,NJ: IEEE Press, 2008: 1-5.
[19] WEISS A J, AMAR A. Direct position determination of multiple radio signals[J]. EURASIP Journal on Applied Signal Processing, 2005(1): 37-49.
[20] AMAR A, WEISS A J. Direct position determination in the presence of model errors-known waveforms[J]. Digital Signal Processing, 2006, 16(1): 52-83.
[21] LI J Z, YANG L, GUO F C, et al. Coherent summation of multiple short-time signals for direct positioning of a wideband source based on delay and Doppler[J]. Digital Signal Processing, 2016, 48(C): 58-70.
[22] 王永良, 陈辉, 彭应宁, 等. 空间谱估计理论与算法[M]. 北京: 清华大学出版社, 2005: 20-21.
WANG Y L, CHEN H, PENG Y N, et al. Spatial spectrum estimation theory and algorithms[M]. Beijing: Tsing-hua University Press, 2005: 20-21 (in Chinese).
[23] PEKKA S, PAEIVI M, KARIN A. Linearization method for finding Cramér-Rao bounds in signal processing[J]. IEEE Transactions on Signal Processing, 2001, 49(12): 3168-3169.
[24] WANG C, TANG J, WU Y. Eigenspace-based beamforming technique for multipath coherent signals reception[J]. Signal Processing, 2016, 128(C): 150-154.
猜你喜欢
电子技术与软件工程(2022年6期)2022-07-07
雷达学报(2022年2期)2022-04-30
电脑知识与技术(2021年22期)2021-09-14
导航定位与授时(2020年5期)2020-09-23
汽车与驾驶维修(维修版)(2020年2期)2020-03-20
中国外汇(2019年20期)2019-11-25
花火B(2019年3期)2019-04-27
电子制作(2019年23期)2019-02-23
汽车维护与修理(2018年9期)2018-10-31
宇航计测技术(2018年3期)2018-09-08