基于距离子带的机载SAR高精度多级空变运动补偿
2018-03-15 10:16杨鸣冬俞翔朱岱寅
航空学报 2018年2期
杨鸣冬,俞翔, 2,朱岱寅, *
1.南京航空航天大学 电子信息工程学院 雷达成像与微波光子技术教育部重点实验室,南京 211106 2.南京工程学院 计算机工程学院,南京 211167
合成孔径雷达(Synthetic Aperture Radar,SAR)作为一项先进的高分辨率对地观测技术,有着十分广阔的应用前景[1-2]。实际工作时受气流等因素的干扰,雷达平台难以保持匀速直线飞行,引入了不可忽略的运动误差,对图像的分辨率、对比度和几何线性度等产生影响[3-5]。并且,随着分辨率的提高、测绘带的扩大,运动误差引起的图像散焦将更加严重。因此,运动补偿(MOtion COmpensation,MOCO)作为机载SAR数据处理中的关键步骤,一直是研究热点[2-17]。
基于运动测量数据的补偿算法[3-11]能够有效去除运动误差的影响。两步运动补偿法是其中的代表[4],其针对Chirp Scaling算法(Chirp Scaling Algorithm,CSA)提出,包括一阶运动补偿和二阶运动补偿两部分:前者补偿距离空不变分量,在距离徙动校正(Range Cell Migration Correction,RCMC)前进行;后者补偿残余距离空变分量,在RCMC后和方位压缩前进行。Omega-K算法(Omega-K Algorithm,OKA)相对于CSA几乎无任何近似,超高分辨率情况下性能更优;但是关键步骤Stolt插值在实现残余RCMC的同时完成了残余方位压缩,无法直接结合两步运动补偿法。为了解决这个问题,文献[5]提出了一种修正Stolt插值的扩展Omega-K算法(Extended Omega-K Algorithm,EOKA)。然而,超高分辨率成像中,残余距离空变误差引入了不可忽略的RCMC误差,两步运动补偿法效果并不理想。OKA与CSA在处理流程上的一个重要区别是OKA能够首先完成距离压缩,因此,文献[6,7]将一阶运动补偿和二阶运动补偿合并,直接对RCMC前的距离压缩信号进行完整的运动补偿,称之为一步运动补偿法。该算法提高了RCMC的精度,效果优于两步运动补偿法;并且能够直接与传统OKA结合,无需特别修正。
实际应用中,处理效率也是衡量运动补偿算法性能的一个重要因素。一步运动补偿法中的精确空变距离包络补偿需要通过复杂的插值实现,处理时间长,资源耗费大。文献[18]指出,当距离向测绘带宽度远小于雷达作用距离时,包络误差的距离空变性可以忽略。为了满足该条件,研究人员对距离压缩后的信号划分子带,从而只需要补偿各子带中心对应的距离空不变分量,利用复乘代替插值。但是这种近似距离包络补偿会影响后续的相位补偿,引起的相位误差在超高分辨率情况下不可忽略,限制了补偿精度。
此外,基于“窄波束假设”[19-20],上述算法只考虑了运动误差的距离空变性,而忽略了误差在波束照射范围内的方位空变性。因此,针对宽波束高分辨率成像,上述算法难以满足实际应用的精度要求。利用多普勒频率与方位时间的关系,孔径依赖补偿算法[8-9]对残余方位空变误差作进一步校正。精确地形孔径依赖(Precise Topography and Aperture-Dependent,PTA)算法、多普勒频谱分割(Frequency Division,FD)算法和子孔径地形孔径依赖(Subaperture Topography and Aperture-Dependent,SATA)算法是3种代表性算法,在精度和效率上各有优劣。PTA的精度很高,是最接近理想情况的算法[9],但运算量较大;SATA运算效率高,但当航迹误差变化较快时补偿效果较差,精度难以满足超高分辨率成像的要求;FD在需要满足高精度要求时反而会大大增加运算量,甚至超过PTA。处理流程上,PTA是对方位压缩后的粗聚焦图像数据进行处理,而FD和SATA则是对方位压缩前的数据进行处理。考虑到成像算法使用的是OKA,Stolt插值已经完成了方位压缩,经过二维FFT得到粗聚焦图像,就可以直接进行PTA处理。如果使用FD或SATA,还需要增加一个恢复方位向未压缩信号的步骤,流程相对复杂。因此,本文选择PTA作为主要研究对象,不涉及FD和SATA。主要解决2个问题:① 残余方位空变误差具有距离空变性,需要单独对每个像素的误差进行计算,处理效率较低;② 受残余方位空变误差的影响,传统的方位时频关系已经不再成立,孔径依赖补偿算法在实际应用中受到很大限制。
本文首先对两步运动补偿法引起的RCMC误差进行分析,证明了超高分辨率成像中一步运动补偿法性能更优,更适合OKA。在此基础上,提出了一种改进的多级空变运动补偿方案。利用距离子带提高处理效率:① 子带内包络误差的距离空变性降低,实现无插值的近似距离包络补偿;② 子带内残余方位空变误差的距离空变性降低,孔径依赖补偿算法不再需要逐像素计算。并且,距离子带还能够降低残余方位空变误差对方位时频关系的影响,提高孔径依赖补偿算法的精度。同时,为了保证相位补偿效果不受近似距离包络补偿的影响,修正了视线方向误差的传统计算方式,对传统算法的处理顺序进行调准。点目标仿真和实测数据处理验证了本文的研究。
1 一步运动补偿法
图1 存在航迹误差情况下的SAR几何关系Fig.1 SAR geometric relationship in presence of trajectory deviations
存在航迹误差情况下的SAR几何关系如图1所示,不考虑斜视角和地形起伏的影响,假设只在水平方向(y轴)和高度方向(z轴)存在误差,前进方向(x轴)无误差。理想航迹平行于x轴,载机速度为V,高度为H,方位向坐标为xA;目标T的方位向坐标为xT,与理想航迹的最短斜距为rT。Rn为理想航迹下目标与雷达的瞬时斜距;R为实际航迹下目标与雷达的瞬时斜距;Δr为视线方向误差。本节忽略运动误差的方位空变性,着重分析距离空变性的影响。
基于“窄波束假设”,波束照射范围内任意目标的运动误差可以近似用波束中心线上相同最短斜距处目标的运动误差来代替,即ΔR(xA,xT,rT)=R-Rn≈Δr(xA,rT)。通常将运动误差分解为距离空不变和距离空变两部分,即
Δr(xA,rT)=Δrc(xA,rc)+Δrv(xA,rT)
(1)
式中:Δrc为针对场景中心rc的距离空不变分量;Δrv为残余距离空变分量。
运动误差对信号的影响主要体现为包络误差和相位误差,前者使得信号的包络在距离向出现偏移,后者对信号的相位产生干扰。两步运动补偿法首先进行一阶运动补偿,校正距离空不变分量产生的包络误差和相位误差。对于OKA,一阶运动补偿可以在距离压缩处理时一起完成。一阶运动补偿和距离压缩后的信号可以表示为
(2)
式中:sinc(*)=sin(*)/*;rect(*)表示矩形窗函数;tr为距离向快时间;ta为方位向慢时间;Tp为脉冲宽度;c为光速;kr为发射信号调频斜率;λ为波长;tc为目标的波束中心穿越时刻;Ta为合成孔径时间。一阶运动补偿精确校正了距离空不变分量,但对于非场景中心的目标,两步运动补偿法需要采用二阶运动补偿,以消除残余距离空变分量的影响。
然而,残余距离空变分量会影响后续的RCMC,产生不可忽略的RCMC误差。存在运动误差的情况下,实际回波的二维频谱可以表示为理想回波频谱和其一系列方位向平移复制谱的加权求和(详见附录A)。基于这种形式的频谱,将一致压缩后的信号相位θbc(fr,fa)展开至fr和fa的二次项,可以得到第k阶误差谱对应的RCMC误差为
(3)
式中:fr为距离向频率;fa为多普勒(方位向)频率;fc为载频;fe为Δrv的频率。该误差严重影响了RCMC的效果,目标信号散布于多个距离单元中,最终导致图像散焦。并且,RCMC误差|ΔθRCMC,k|正比于运动误差频率fe和测绘带宽度|rT-rc|,同时运动误差幅度又决定了不可忽略的误差谱数目。因此,两步运动补偿法受运动误差特性和测绘带宽度的影响,运动误差幅度越大、频率越高、测绘带越宽,补偿效果越差。
超高分辨率宽测绘带成像中,为了获得理想的RCMC效果,高精度的运动补偿算法应在RCMC前尽可能完全地校正所有误差分量。二阶运动补偿是基于RCMC后的目标轨迹进行处理;对于任意目标来说,无论RCMC是否完成,残余距离空变误差都不会随之改变,因此,残余距离空变误差也能在RCMC前补偿。一步运动补偿法对距离压缩后、RCMC前的目标轨迹直接进行完整的距离空变运动补偿。相对于CSA,OKA能够首先进行距离压缩,一步运动补偿法更加合理,使得后续处理不受残余距离空变误差的影响。
由于运动误差的距离空变性,一步运动补偿法需要逐距离单元处理。首先进行距离包络补偿,通过插值将信号包络校正到正确的距离单元;接着进行相位补偿,参考函数为
(4)
综上,对两种运动补偿算法进行一个简单的对比:
1) 成像效果:两步运动补偿法中残余距离空变误差引起额外的RCMC误差,降低了RCMC精度;一步运动补偿法中距离空变误差在RCMC前被完全补偿,保证了RCMC精度,能够获得更好的聚焦质量。
2) 处理效率:两步运动补偿法中的二阶运动补偿需要在残余方位压缩前的方位时域中进行,因此相对于一步运动补偿法增加了一次FFT操作和一次IFFT操作;并且,一阶运动补偿和残余方位压缩还对应额外的两次复乘操作。
3) 与OKA的结合性:两步运动补偿法不能直接用于OKA,必须修正Stolt插值,将残余RCMC和残余方位压缩分离,使得后续还需要单独进行残余方位压缩;一步运动补偿法能够直接与OKA结合,不需要进行额外的修改,流程更加简便。
2 多级空变运动补偿方案
随着分辨率的提高,一步运动补偿法在实际应用中仍然受到诸多限制。首先,距离包络补偿的处理效率较低。由于运动误差的距离空变性,精确的距离包络补偿需要通过插值实现,运算量较大,处理时间较长,难以满足实时处理的要求。并且,插值通常由一个单独的处理步骤完成,难以与处理流程的其他环节合并。其次,运动误差的方位空变补偿精度不够。一步运动补偿法侧重于运动误差的距离空变性,忽略了方位空变性。当方位波束较宽时,残余方位空变误差对图像质量的影响更加明显,一步运动补偿法的精度严重下降。针对上述问题,本文对传统一步运动补偿法进行改进,并结合孔径依赖补偿算法,基于距离子带提出了一种兼顾精度与效率的多级空变运动补偿方案。
2.1 改进的一步运动补偿法
距离压缩后的信号通过划分距离子带,使得子带宽度远小于作用距离,包络误差的距离空变性可以近似忽略。此时,对于各个子带,距离包络补偿可以只补偿子带中心对应的距离空不变分量,在距离频域乘以一个线性相位即可完成,避免了复杂的插值。然而,超高分辨率成像中,这种近似距离包络补偿带来一个新的问题:非中心目标的信号并没有校正到正确的距离单元,相位补偿参考函数与真实的相位误差失配,影响相位补偿的精度。超高分辨率成像对信号的相位精度尤其敏感,信号相位决定目标的聚焦效果[16]。为了达到在距离包络补偿前完成相位补偿,确保信号的相位精度不受影响的目的,需要修正视线方向误差的传统计算方式。
计算视线方向误差时,首先定义各个距离单元对应的斜距为
(5)

(6)
那么,实际航迹下的斜距为
(7)
将式(6)代入式(7),可以计算出视线方向误差为
Δr=
(8)
一步运动补偿法的传统流程中相位补偿在距离包络补偿之后,只有将目标信号校正到正确的距离单元,式(8)才与真实误差对应,相位补偿效果才足够理想。前文所述的近似距离包络补偿虽然能够避免复杂的插值操作,但是大大限制了后续相位补偿的精度。对于视线方向误差Δr的目标,假设近似距离包络补偿将其校正到第q个距离单元
q=2(rT-r0+Δr-Δrc)fs/c≠m
(9)
第q个距离单元对应的视线方向误差为

图2 跨航迹平面内的SAR几何关系Fig.2 SAR geometric relationship in cross track plane
Δr′=
(10)
并不对应目标的真实误差,但传统相位补偿仍然根据式(10)生成参考函数,从而产生残余相位误差
(11)
残余相位误差对后续的RCMC等关键步骤产生较大影响,引起点目标响应畸变,降低了最终的图像质量。以斜距和方位分辨率均为0.1 m的机载X波段雷达为例,航迹误差取自真实惯导数据,如图3所示。某一距离子带中心对应的斜距为6 600 m,目标斜距为6 400 m,近似距离包络补偿引起的残余相位误差的曲线如图4所示。可以看出,在合成孔径时间内,近似距离包络补偿引起的残余相位误差能够达到2.5 rad,对分辨率的影响不可忽略。
为了提高处理效率的同时而又不影响相位补偿的精度,本文提出了一种改进的相位补偿,对传统一步运动补偿法中两个处理环节的顺序进行调整,关键是修正视线方向误差的计算方式。由于还没有进行距离包络补偿,目标信号所处的距离单元对应于实际航迹下的斜距。假设实际航迹下的斜距rT+Δr对应于第p个距离单元rT+Δr=rb(p),则
(12)
理想航迹下的斜距为
(13)
修正的Δr计算公式
Δr=rb(p)-
(14)
无论是否进行运动补偿,目标理想航迹和实际航迹下的斜距都与式(5)中定义的某一距离单元对应。传统方式是假设式(5)映射为理想航迹下的斜距,然后计算实际航迹下的斜距,相位补偿参考函数对应精确距离包络补偿后的信号,近似距离包络补偿就会使得相位补偿精度降低。本文是假设式(5)映射为实际航迹下的斜距,反推理想航迹下的斜距,相位补偿参考函数针对距离包络补偿前的信号,与真实的相位误差准确匹配,保证了相位补偿的精度。
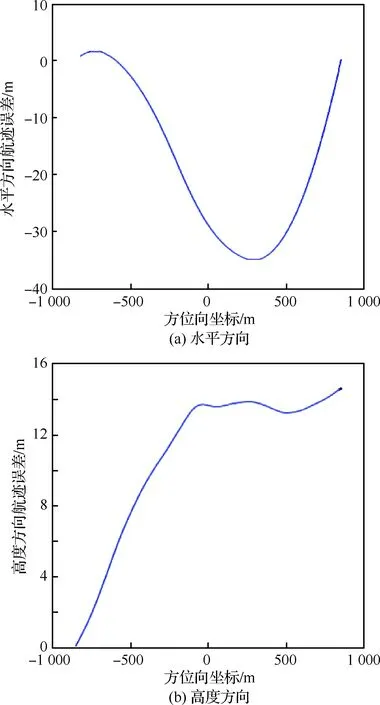
图3 航迹误差Fig.3 Trajectory deviations

图4 近似距离包络补偿引起的残余相位误差Fig.4 Residual phase error induced by approximate range envelope compensation
综上,在保证相位补偿精度的前提下,采用基于距离子带的近似距离包络补偿才更加合理。令划分为P条距离子带,子带距离单元数为Nr_sub,相邻子带间隔为N0,则第i条子带对应的相位补偿参考函数为
(15)
Δri=rb(l)-
iN0≤l≤iN0+Nr_sub-1
(16)
近似距离包络补偿参考函数为
(17)
式中:Δrc,i为第i条子带中心对应的视线方向误差。由于采用改进的相位补偿,有效避免了近似距离包络补偿引起的残余相位误差,理论上只存在近似距离包络补偿本身的残余包络误差,即
(18)
该误差使得信号距离向频谱附加了一个线性相位,根据傅里叶变换的性质,在图像上主要表现为目标距离向位置的偏移,对分辨率几乎没有影响。仍然以斜距6 400 m处的目标为例,经过改进的相位补偿和距离子带中心对应的近似距离包络补偿,图5展示了合成孔径时间内目标距离向位置的偏移,实际应用中,该偏移量相对于整个距离向测绘带宽度是能够容许的,并且可以在后续子带图像拼接中进行校准补偿。

图5 近似距离包络补偿引起的距离偏移Fig.5 Range cell shift induced by approximate range envelope compensation
2.2 改进的孔径依赖补偿算法
一步运动补偿法基于“窄波束假设”忽略了运动误差在波束照射范围内的方位空变性,从而只需要沿着波束中心线进行补偿。该近似虽然大大简化了算法的流程,但是也限制了算法的精度,尤其是在宽波束高分辨率成像中。
考虑方位空变性,根据图1中的几何关系,运动误差可以表示为
(19)
根据图2中的几何关系,视线方向误差Δr可以表示为
-dsin(θ+α)=-(Δysinθ+Δzcosθ)
(20)
那么,运动误差的方位空变分量为
Δra(xA,xT,rT)=ΔR(xA,xT,rT)-
(21)
宽波束高分辨率成像中该分量的影响不可忽略。为了有效补偿残余方位空变误差,PTA对一步运动补偿法得到的SAR图像进行后续处理,基本思想是利用SAR信号处理中多普勒频率与方位时间的关系
(22)
根据式(22)将Δra映射到多普勒域,进行运动补偿:
(23)
然而,传统PTA在实际应用中存在一定缺陷。与一步运动补偿法类似,首要问题是处理效率低。由式(21)可知,残余方位空变误差同时具有距离空变性,需要逐像素计算误差进行补偿,运算量较大。借鉴前文的近似距离包络补偿,通过限制距离子带的范围,可以忽略残余方位空变误差的距离空变性,从而降低运算量。为了满足上述条件,本节对距离子带的合适宽度进行推导。
根据式(21),对于方位向坐标xT、斜距rT+δr处的目标,残余方位空变误差为
Δra(xA,xT,rT+δr)≈
(24)
与式(21)相减得到
δΔra=Δra(xA,xT,rT)-Δra(xA,xT,rT+δr)≈
(25)
式中:β为目标的斜视角(方位角),β=arctan[(xA-xT)/rT]。如果δΔra引起的相位误差不超过π/8,其对分辨率的影响通常可以忽略。因此,δr的范围为
(26)
根据式(26)中的限制条件划分距离子带,可以忽略残余方位空变误差的距离空变性,只需要计算子带中心距离单元对应的误差,降低了传统PTA的运算量。
另一方面,超高分辨率成像中,残余方位空变误差对方位时频关系的影响不可忽略。理想航迹下,如式(22)所示,多普勒频率与方位时间存在简单的一一对应关系。文献[17]指出,存在残余方位空变误差时,方位时频关系变得复杂,应重新推导,即
(27)
并且,文献[21]证明了此时式(22)中的一一对应关系不再成立,传统PTA的效果不够理想。根据文献[21],限制成像范围的大小,式(27)仍能满足一一对应的关系。因此,距离子带不但能够提高处理效率,还能够改善补偿效果。同时,需要根据式(27)中的方位时频关系修正运动补偿的参考函数
(28)
此外,方位时频关系的差异也意味着方位向驻留相位点受到影响,造成OKA中的残余方位压缩失配。因此,需要对残余方位压缩误差进行补偿,相应的参考函数为
(29)
(30)
综上,本文基于距离子带对一步运动补偿法和PTA进行改进。距离子带的作用主要在于降低运算量,提高处理效率:① 降低包络误差的距离空变性,只需要进行近似距离包络补偿,避免了复杂的插值;② 降低残余方位空变误差的距离空变性,利用子带中心距离单元的误差代替其他距离单元的误差,不再需要对所有像素进行计算。另一方面,距离向划分子带还能够使得多普勒频率与方位时间仍然满足一一对应的关系,改善了算法的补偿效果。同时,修正了视线方向误差的传统计算方式,对传统一步运动补偿法中两个处理环节的顺序进行调整,提高处理效率的同时而又不影响相位补偿的精度。此外,根据式(27)的方位时频关系,修正运动补偿参考函数,补偿残余方位压缩误差。
如图6所示,基于距离子带的多级空变运动补偿方案的完整流程为:
步骤1计算子带宽度,对距离压缩后的信号划分距离子带。
步骤2根据式(16)计算修正的视线方向误差,方位时域乘以式(15)完成改进的相位补偿。
步骤3二维FFT变换到二维频域,乘以式(17)和一致压缩参考函数,完成近似距离包络补偿和一致压缩。
步骤4Stolt插值完成后进行二维IFFT得到距离子带的粗聚焦图像。
步骤5方位向划分重叠子图像,计算每个子图像中心距离单元对应的残余方位空变误差,根据式(27)将误差映射到多普勒域。
步骤6完成修正的孔径依赖补偿和残余方位压缩误差补偿,方位向IFFT得到精聚焦图像。
步骤7剩余子孔径信号重复步骤5和步骤6,直到所有子孔径处理结束。
步骤8重复步骤2~步骤7,拼接各个子带图像,得到整个测绘带的图像。

图6 所提算法流程图Fig.6 Processing flowchart of proposed approach
2.3 运算量分析
根据处理中的浮点运算量(Floating Point Operations,FLOPs)[22],对本文所提运动补偿方案的运算量进行一个简单的分析。其中,长度为N的FFT或IFFT的FLOPs为5Nlog2N,一次复数相乘的FLOPs为6,插值核长度为M的插值的FLOPs为2(2M-1)。假设数据的方位向长度为Na,划分的子图像方位向长度为Na_sub,相邻子图像间隔为aNa_sub,0≤a<1;距离向长度为Nr,划分的距离子带长度为Nr_sub,相邻子带间隔为bNr_sub,0≤b<1。
距离空变补偿方面,改进的一步运动补偿法利用复乘替换插值,大大降低了运算复杂度,减少了处理时间。精确距离包络补偿对每个采样点都需要进行插值处理,其运算量为
CPEC=2(2M-1)NaNr
(31)
式中:下标PEC为精确包络补偿(Precise Envelope Compensation)的缩写。为满足超高分辨率要求,SAR成像中常用的sinc插值的核长度为8,代入式(31)得到CPEC=30NaNr。而基于距离子带的近似距离包络补偿对每个采样点只需进行一次复乘即可,其运算量为
CAEC=6NaNr/b-6NaNr_sub(1/b-1)
(32)
式中:下标AEC为近似包络补偿(Approximate Envelope Compensation)的缩写。令相邻子带复用一半的距离单元,即b=1/2,代入式(32)得到CAEC=12NaNr-6NaNr_sub,运算量小于插值实现的精确距离包络补偿。此外,近似距离包络补偿可以与OKA中的一致压缩合并,不需要单独的处理步骤,进一步提高了处理效率。
方位空变补偿方面,无论是传统PTA,还是本文的改进PTA,处理流程都是由一次FFT、一次IFFT和一次复乘构成。因此,两者该部分的运算量大致相同,为(10log2Na_sub+6)NaNr。由于改进的PTA划分距离子带进行处理,根据式(26)确定的限制条件,子带内所有距离单元的残余方位空变误差可以用子带中心距离单元的值代替,式(27)中的方位时频关系也只需要对子带中心距离单元进行计算。因此,相对于传统PTA,主要是降低了这两个步骤的运算量。假设残余方位空变误差的运算量为Oave,方位时频关系的运算量为Oatf,则传统PTA这两个步骤的运算量为
(33)
改进PTA的运算量为
(34)
式中:下标MPTA为改进PTA(Modified PTA)的缩写。
上述对比的算法都是在频域进行处理,时域处理算法也能够精确地对运动误差进行补偿,而且不存在任何近似,但是运算量却更加巨大。以经典时域处理算法——后向投影算法(Back Projection,BP)为例,其与本文所提方案运算量的差异主要在距离压缩后的后向投影处理,因为要进行大量的插值。假设BP成像网格的方位向和距离向长度仍分别为Na和Nr,插值核长度为M,则后向投影的运算量为
(35)
本文所提方案在距离压缩后主要是改进的一步运动补偿法、OKA成像和改进的PTA这3个处理,总的运算量为
Nr_sub10Nalog2Na+Na10Nr_sublog2Nr_sub+
12Na_sub)}
(36)
式中:下标PA为所提方案(Proposed Approach)的缩写。为更直观地进行对比,以前文中的雷达数据为例,方位向采样点个数为16 384,距离向采样点个数为65 536。根据式(26)计算得到子带宽度大约不能超过469.583 m,出于FFT处理时的基2考虑,子带宽度选择4 096个距离单元,a=1/2。PTA处理时子图像方位向长度选择64个脉冲,b=1/2;插值核长度为8。后向投影的运算量为527 765.581 GFLOPs(giga-FLOPs=109FLOPs),所提算法3个处理的运算量为927.262 GFLOPs,远小于前者。虽然本文只使用了一块数据进行说明,但是其他数据也能得到相似的结论。
3 点目标仿真和实测数据处理
3.1 点目标仿真
基于某高分辨率机载条带SAR的工作参数进行点目标仿真,雷达工作于X波段,斜距分辨率为0.1 m,方位分辨率为0.1 m,航迹误差如图3所示,其他主要参数如表1所示。点目标仿真分布几何模型如图7所示,P1、P2和P3均偏离各自的子带中心一定距离,其中P1位于场景近距,P2位于场景中心附近,P3位于场景远距。
首先是两步运动补偿法和一步运动补偿法的对比实验。图8为目标P3的RCMC处理结果,其中图 8(a)采用结合两步运动补偿法的扩展OKA,图 8(b)采用结合一步运动补偿法的传统OKA。对比发现,超高分辨率情况下,残余距离空变误差严重影响到RCMC的效果,主要表现为目标轨迹发生弯曲,不再是一条理想直线。
进一步对比最终的点目标聚焦效果,图9为目标P2的成像结果,图10为目标P3的成像结果。等高线分别对应为-3、-15和-30 dB,后图相同。图 9(a)和图 10(a)采用结合两步运动补偿法的扩展OKA,图 9(b)和图 10(b)采用结合一步运动补偿法的传统OKA。对于场景中心附近目标P2,残余距离空变误差较小,两种运动补偿算法效果差异不是很大;对于场景边缘目标P3,两步运动补偿法则出现严重散焦,分辨率损失,验证了本文的分析。一步运动补偿法在RCMC前对运动误差进行了完整的距离空变补偿,提高了RCMC的精度,在超高分辨率情况下仍能获得聚焦良好的成像结果。
接下来验证改进的一步运动补偿法,对回波信号分别利用3种不同算法进行运动补偿,图11为目标P1的成像结果。图11(a)对应传统的一步运动补偿法,通过插值实现精确的距离包络补偿,再进行相位补偿;图11(b)对应基于子带的一步运动补偿法,处理顺序与传统算法一致,结合距离子带实现近似距离包络补偿;图11(c)对应改进的基于子带一步运动补偿法,调整了近似距离包络补偿和相位补偿的处理顺序,基于修正的视线方向误差计算方式完成改进的相位补偿。对比发现,图11(b)中的点目标响应有明显畸变,聚焦质量下降;图11(c)能够获得与图11(a)相当的聚焦效果,但复乘代替了插值,提高了处理效率。

表1 主要仿真参数Table 1 Main simulation parameters

图7 点目标仿真分布几何模型Fig.7 Geometric model of simulated point targets

图8 目标P3的RCMC处理结果Fig.8 RCMC results of point Target P3

图9 目标P2成像结果Fig.9 Imaging results of point Target P2

图10 目标P3成像结果Fig.10 Imaging results of point Target P3
最后验证改进的PTA,为了突出方位空变性对运动补偿处理的影响,将表 1中的方位波束宽度扩大为14°。图12为目标P4的成像结果,其中图12(a)只采用了一步运动补偿法,图12(b)在一步运动补偿法的基础上利用传统PTA对残余方位空变误差做进一步校正,图12(c)则采用的是改进的PTA。对比发现,随着方位波束宽度的增大,一步运动补偿法的精度明显降低;本文提出的改进算法仍然能够获得良好的聚焦效果,并且运算量相对于传统算法有所下降。
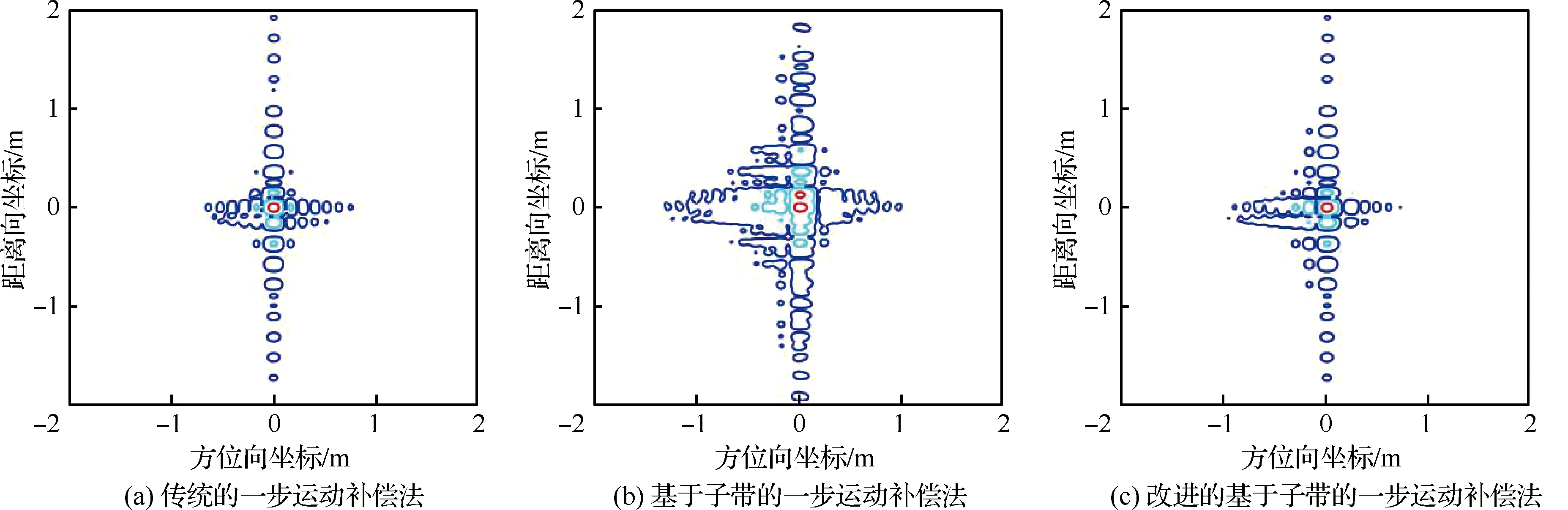
图11 目标P1成像结果Fig.11 Imaging results of point Target P1
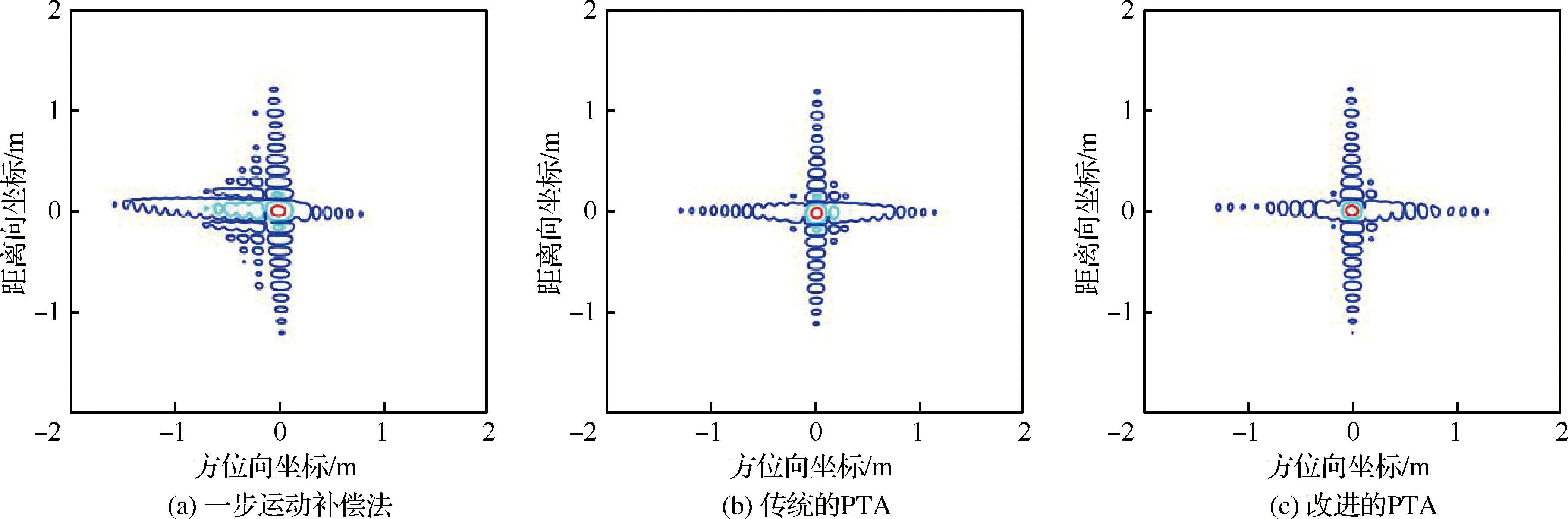
图12 目标P4成像结果Fig.12 Imaging results of point Target P4
3.2 实测数据处理
图13为采用本文提出的运动补偿方案对实测数据进行处理的结果,水平方向为方位向,垂直方向为斜距向。斜距分辨率为0.1 m,方位分辨率为0.1 m,距离向测绘带范围约为3.28 km,航迹误差如图3所示。图14~图16分别为不同位置的场景A、B和C的成像结果放大图,图17为场景中一强散射点目标D的方位向剖面。图14(a)、图15(a)、图16(a)和图17(a)采用两步运动补偿法,图14(b)、图15(b)、图16(b)和图17(b)采用一步运动补偿法,图14(c)、图15(c)、图16(c)和图17(c)采用本文提出的方案。对比发现,两步运动补偿法引入了不可忽略的RCMC误差,图像散焦;一步运动补偿法的效果较两步运动补偿法有所提升,但受残余方位空变误差的影响,聚焦效果还不是很理想;本文提出的运动补偿方案聚焦效果最优,并且图像斜距向和方位向均无拼接痕迹。图17中方位向剖面的对比更为明显,图17(a)中旁瓣幅度都较高,主瓣也较宽,影响目标的区分能力;图17(b)中旁瓣幅度有所下降,但主瓣宽度仍不够理想;图17(c)中旁瓣幅度较主瓣有明显下降,主瓣宽度也进一步变窄,算法有效性进一步得到验证。

图13 实测数据成像结果Fig.13 Imaging results of test data

图14 场景A成像结果Fig.14 Imaging results of Scene A
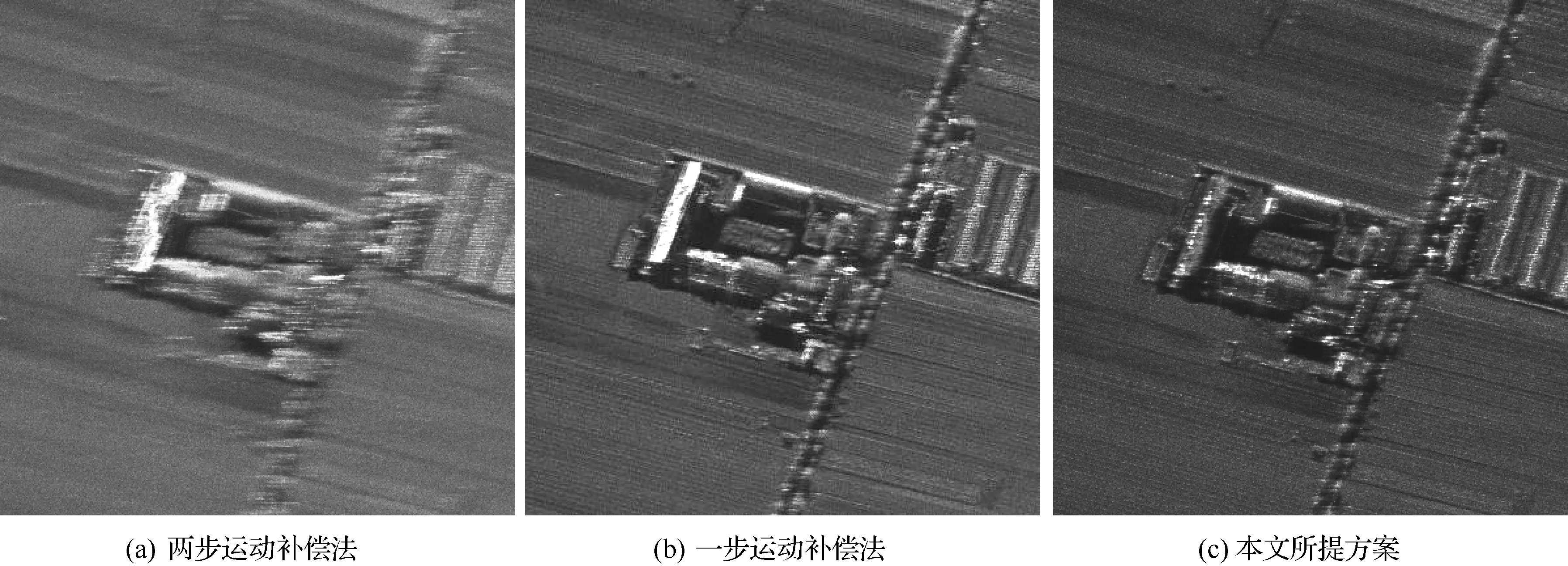
图15 场景B成像结果Fig.15 Imaging results of Scene B

图16 场景C成像结果Fig.16 Imaging results of Scene C

图17 散射点D的方位向剖面Fig.17 Azimuth profiles of Scatter D
4 结 论
超高分辨率SAR成像中,运动补偿是需要深入研究的一个重要问题。本文基于OKA,对比了两种常用的距离空变运动补偿算法;同时,提出了一种改进的多级空变运动补偿方案,考虑运动误差的距离和方位空变性,兼顾处理的精度和效率。方案精度高,运算量适中,具有较高的实际工程应用价值。
1) 分析两步运动补偿法引起的RCMC误差,对比了两步运动补偿法和一步运动补偿法的性能。对于OKA,一步运动补偿法效果更优,且能更简便地结合到成像流程中。
2) 划分距离子带,降低运算量,提高处理效率:一是降低包络误差的距离空变性,实现无插值的近似距离包络补偿;二是降低残余方位空变误差的距离空变性,不再需要逐像素计算误差和逐距离单元计算方位时频关系。
3) 修正了视线方向误差的传统计算方式,对传统一步运动补偿法的处理顺序进行调整,保证相位补偿的效果不受近似距离包络补偿的影响。
4) 划分距离子带还能够使得多普勒频率与方位时间仍然满足一一对应的关系,改善了孔径依赖补偿算法的效果。
[1] REIGBER A, SCHEIBER R, JAGER M, et al. Very high resolution airborne synthetic aperture radar imaging: Signal processing and applications[J]. Proceedings of the IEEE, 2013, 101(3): 759-783.
[2] CANTALLOUBE H M J, NAHUM C E. Airborne SAR-efficient signal processing for very high resolution[J]. Proceedings of the IEEE, 2013, 101(3): 784-797.
[3] FORNARO G. Trajectory deviations in airborne SAR: Analysis and compensation[J]. IEEE Transactions on Aerospace and Electronic Systems, 1999, 35(3): 997-1009.
[4] MOREIRA A, MITTERMAYER J, SCHEIBER R. Extended chirp scaling algorithm for air- and spaceborne SAR data processing in stripmap and ScanSAR imaging modes[J]. IEEE Transactions on Geoscience and Remote Sensing, 1996, 34(5): 1123-1136.
[5] REIGBER A, ALIVIZATOS E, POTSIS A, et al. Extended wavenumber-domain synthetic aperture radar focusing with integrated motion compensation[J]. IEE proceedings—Radar, Sonar and Navigation, 2006, 153(3): 301-310.
[6] BUCKREUSS S. Motion compensation for airborne SAR based on inertial data, RDM and GPS[C]∥Geoscience and Remote Sensing Symposium. Piscataway, NJ: IEEE Press, 1994: 1971-1973.
[7] MENG D D, HU D H, DING C B. Precise focusing of airborne SAR data with wide apertures large trajectory deviations: A chirp modulated back-projection approach[J]. IEEE Transactions on Geoscience and Remote Sensing, 2015, 53(5): 2510-2519.
[8] MACEDO K A C D E, SCHEIBER R. Precise topography- and aperture-dependent motion compensation for airborne SAR[J]. IEEE Geoscience and Remote Sensing Letters, 2004, 2(2): 172-176.
[9] PRATS P, MACEDO K A C D E, REIGBER A, et al. Comparison of topography- and aperture-dependent motion compensation algorithms for airborne SAR[J]. IEEE Geoscience and Remote Sensing Letters, 2007, 4(3): 349-353.
[10] DING Z G, LIU L S, ZENG T, et al. Improved motion compensation approach for squint airborne SAR[J]. IEEE Transactions on Geoscience and Remote Sensing, 2013, 51(8): 4378-4387.
[11] 杨鸣冬, 朱岱寅. 结合视线方向运动补偿的滑动聚束SAR子孔径成像算法[J]. 航空学报, 2016, 37(3): 984-996.
YANG M D, ZHU D Y. An imaging approach for sliding spotlight SAR using subaperture with line-of-sight motion compensation[J]. Acta Aeronautica et Astronautica Sinica, 2016, 37(3): 984-996 (in Chinese).
[12] 宋伟, 朱岱寅, 叶少华. 基于数值计算的机载SAR空变运动补偿算法[J]. 航空学报, 2015, 36(2): 625-632.
SONG W, ZHU D Y, YE S H. Airborne SAR space-variant motion compensation algorithm based on numerical calculation[J]. Acta Aeronautica et Astronautica Sinica, 2015, 36(2): 625-632 (in Chinese).
[13] ZENG L T, LIANG Y, XING M D, et al. A novel motion compensation approach for airborne spotlight SAR of high-resolution and high-squint mode[J]. IEEE Geoscience and Remote Sensing Letters, 2016, 13(3): 429-433.
[14] YANG M D, ZHU D Y, SONG W. Comparison of two-step and one-step motion compensation algorithms for airborne synthetic aperture radar[J]. Electronics Letters, 2015, 51(14): 1108-1110.
[15] TANG S Y, ZHANG L R, GUO P, et al. Processing of monostatic SAR data with general configurations[J]. IEEE Transactions on Geoscience and Remote Sensing, 2015, 53(12): 6529-6546.
[16] FORNARO G, FRANCESCHETTI G, PERNA S. Motion compensation errors: Effects on the accuracy of airborne SAR images[J]. IEEE Transactions on Aerospace and Electronic Systems, 2005, 41(4): 1338-1352.
[17] PERNA S, ZAMPARELLI V, PAUCIULLO A, et al. Azimuth-to-frequency mapping in airborne SAR data corrupted by uncompensated motion errors[J]. IEEE Geoscience and Remote Sensing Letters, 2013, 10(10): 1493-1497.
[18] PRATS-IRAOLA P, SCHEIBER R, RODRIGUEZ-CASSOLA M, et al. On the processing of very high resolution spaceborne SAR data[J]. IEEE Transactions on Geoscience and Remote Sensing, 2014, 52(10): 6003-6016.
[19] FORNARO G, FRANCESCHETTI G, PERNA S. On center-beam approximation in SAR motion compensation[J]. IEEE Geoscience and Remote Sensing Letters, 2006, 3(2): 276-280.
[20] 曾乐天, 邢孟道, 陈士超. 基于窄波束和平地假设的运动补偿方向研究[J]. 电子与信息学报, 2014, 36(10): 2464-2468.
ZENG L T, XING M D, CHEN S C. The research on the direction of motion compensation according to the narrow beam and flat earth hypothesis[J]. Journal of Electronics and Information Technology, 2014, 36(10): 2464-2468 (in Chinese).
[21] 毛新华, 朱岱寅, 朱兆达. 复杂航迹和起伏地形条件下机载聚束SAR空变运动补偿[J]. 航空学报, 2012, 33(4): 744-754.
MAO X H, ZHU D Y, ZHU Z D. Space-variant motion compensation for airborne spotlight SAR under complicated flight path and rugged terrain[J]. Acta Aeronautica et Astronautica Sinica, 2012, 33(4): 744-754 (in Chinese).
[22] CUMMING I G, WONG F H. Digital processing of synthetic aperture radar data: Algorithms and implementation[M]. Norwood, MA: Artech House, 2005: 473-475.
附录A:
存在运动误差的情况下,实际回波的二维频谱可以表示为一系列频谱的加权求和[3]
SS(fr,fa)=
(A1)
SSn(fr,fa)=
(A2)
A=-4π(fc+fr)ev(rT)/c
(A3)
式中:fr为距离向频率;fa为多普勒(方位向)频率;fc为载频;ev(rT)为Δrv的幅度;fe为Δrv的频率;SSn(fr,fa)表示理想回波频谱;J|k|(A)表示k阶第一类Bessel函数。式(A1)中的一系列频谱可以看作是理想回波频谱在方位频域的平移复制,对应的权重系数由Bessel函数决定。理想回波频谱与J0(A)对应,称为主谱;第k阶复制谱与J|k|(A)(k≠0)对应,方位向偏移量为kfe(k=±1,±2,…),称为误差谱。由Bessel函数的性质可知,正弦运动误差的幅度越大,不可忽略的误差谱数目越多。
猜你喜欢
兵器装备工程学报(2022年2期)2022-03-16
幼儿园(2021年12期)2021-11-06
计算机与数字工程(2021年1期)2021-02-25
电子制作(2019年22期)2020-01-14
中学生理科应试(2019年3期)2019-07-08
湖南教育·C版(2018年3期)2018-06-05
现代电子技术(2017年9期)2017-05-18
福建中学数学(2016年7期)2016-12-03
小学生时代·大嘴英语(2015年7期)2015-11-23
为了孩子(孕0~3岁)(2009年6期)2009-07-15