汽车防撞和防侧翻主动安全系统的研究
2018-03-29 07:15
汽车文摘 2018年3期
汽车主动安全系统,可以监测事故发生或者汽车失控的可能性,从而通过发出警报或者直接操控汽车避免事故的发生。汽车防撞和防侧翻主动安全系统是其中的重要组成部分,可以极大程度上提高行车安全。
文献[1]介绍了一种通过识别汽车牌照方法,避免和前方汽车碰撞的防撞预警系统;文献[2]设计了一种汽车防撞系统,可以解决当前ADAS无法有效应对危险驾驶情况的问题;文献[3]介绍了一种低成本汽车防侧翻系统,具有精度高、成本低的优点;文献[4]对汽车避免碰撞算法进行研究,通过NHTSA算法确定安全距离,同时考虑驾驶员反应时间,可以提高碰撞预警准确度;文献[5]介绍了一种客车制动辅助主动安全系统,考虑驾驶员驾驶意图,并检测汽车周围障碍物,及时给制动系统制动信号,避免碰撞事故的发生;文献[6]介绍了一种可进行V2X通信的汽车碰撞预警与避让系统,除了使用汽车传感器检测行人避免碰撞,还可以利用行人智能手机,辅助检测行人位置,更大程度保障行人安全,避免碰撞事故发生。
1 汽车防撞预警系统的设计与研究[1]
汽车碰撞预警系统通过传感器、计算机图像处理来实现监控预警功能。这是智能汽车的关键技术之一。该系统能有效保护行人的安全,减少交通事故的发生率。汽车牌照是车辆上的一个关键视觉特征,大小、形式统一,安装在汽车规定位置上,是一种有身份识别功能的标记。在已有汽车碰撞预警和智能汽车的研究中,对车牌的关注较少。
文中关注汽车车牌,设计出一种汽车碰撞预警系统,可以根据摄像头拍摄到的车牌图像,通过单目视觉定位技术,确定车辆与前方车辆的相对距离和相对速度,从而可以判断危险情况,及时提醒驾驶员采取适当的行动,避免车辆碰撞事故发生。单目视觉传感器具有实时性好,成本低的优点。研究该系统的定位技术可以帮助驾驶员判断危险情况,提高驾驶安全性,具有广阔的应用前景。
除了可以进行目标车辆定位之外,还可以实现确定前方车辆的姿态。同时这种基于识别车牌的汽车碰撞预警系统,不受路面粗糙度的限制。经仿真试验表明,该方法的定位速度快,能够准确定位车牌图像的位置,进而确定车辆与前方车辆的相对位置,从而避免与前方车辆发生碰撞。已有文献中,还没有与文中提出的方法相似的研究。因此,文中进行的相关研究,可以丰富汽车防撞技术和智能汽车技术理论。
2 一种自适应汽车防撞系统设计[2]
为了实现汽车安全驾驶,已有研究者提出了协同智能交通系统(C-ITS)和智能自动驾驶(IDA)系统。采用自适应巡航控制(ACC)、C-ITS协同技术(CACC)和IDA智能汽车技术(IVT),可以显著降低车辆碰撞概率,避免车辆事故。危险驾驶容易导致临近车辆受到威胁,进而降低驾驶安全性。
危险驾驶包括:不稳定驾驶、无法预测行车路径的驾驶、人为异常驾驶、车辆突发机械故障时的驾驶。特别是不稳定的驾驶容易导致蝴蝶效应,增加了碰撞事故发生概率。面临危险驾驶时,即使采用CACC及IVT技术的ADAS,车辆碰撞事故发生率也会上升,目前很少有解决这一问题的相关研究。
文中提出了一种自适应车辆碰撞防御(ACD)系统,可以尽量减少汽车在危急突发情况下,发生事故的概率及降低事故发生的程度。文中提出的ACD方法由三个阶段组成:自适应碰撞时间(TTC)确定阶段,事故发生概率分析阶段和避免事故阶段。研发该系统的主要目标是,将汽车事故发生概率降至最低,并为解决当前ADAS面临的问题,提供一种解决方法。
仿真试验结果表明,文中提出的ACD方法优于已有的TTC比较方法,可以降低碰撞事故发生概率。同时,文中正在扩展模型,从而可以定量的分析在VANET中因危险驾驶引起的蝴蝶效应造成的影响。
3 防止汽车侧翻的低成本主动安全系统[3]
越野汽车在一些复杂地形条件上行驶时,面临很大挑战,有发生侧翻的风险。为了减少侧翻事故发生率,在汽车上安装了一些被动保护装置,但是,这些装置保护能力非常有限。而主动安全装置允许警告驾驶员或直接采取行动控制汽车行驶,是有效的解决方案,可以降低风险,避免危险情况发生。
目前专门用于越野汽车控制的稳定系统的开发仍处于初级阶段。文中提出了一种控制稳定系统,用来评估和避免汽车的侧翻风险。系统需要对汽车的一些参数(如汽车载荷、重心高度等)变化进行监测。由于用于测量横向荷载传递(以下称为LLT)所需的传感器数量较少,可以降低成本,且物理意义明确,计算简单,所以文中选择LLT计算汽车载荷等参数,进而计算侧翻风险。
采用这种系统,用LLT度量侧翻的风险,不用使用较多的传感器,同时能够实时计算汽车上的动态载荷分配,进而系统对变化的载荷进行分析,控制汽车实时调整汽车的抓地力。试验表明,该系统可以精确地计算翻车的风险。
4 一种汽车避免碰撞控制算法[4]
汽车防碰撞系统是安装在汽车上对驾驶员提醒或者在紧急情况时对汽车进行自动控制和紧急制动的系统。汽车防碰撞系统必需具备很小的误警率和漏警率以提高它的可靠性。汽车在行驶过程中的运动状态和驾驶员在面对紧急情况时的反应时间以及路面的附着系数,对汽车防碰撞系统的可靠性起到了关键的作用。
汽车防碰撞控制算法是汽车防碰撞系统的核心,该算法的准确性关系着汽车的行驶安全,对预防汽车碰撞,减少交通事故有着重要的意义。该控制算法作用是确定系统的启动逻辑和启动时机,一个好的避撞算法对整个系统的性能有着重要的影响,因此,其准确性、实时性一直是研究的重点。
文中首先定义了汽车周围的警戒和危险区域,通过车载传感器检测外部物体、障碍物、其他汽车,并获得汽车在行驶过程中的运动状态量。采用NHTSA算法确定安全距离,同时考虑驾驶员的反应时间,进行汽车防碰撞计算,当检测到可能发生碰撞时会给驾驶员警报提示。
试验结果表明,该算法具有较高可靠性,可考虑驾驶员反应时间,给予及时警示,可以显著降低算法的误警率和漏警率。作者会进一步进行研究,将该算法结合汽车制动系统,在检测到可能发生碰撞时,自动控制汽车制动。
5 客车制动辅助主动安全系统[5]
世界卫生组织在2015年全球道路安全状况报告中指出,各国政府有必要确保公共客运系统(PTS)的安全,因为这会减少交通事故发生和降低伤亡人数。公交车和长途客车对推动旅游、节能、环保、道路安全和经济发展具有重要社会经济影响。尽管公共汽车事故造成的伤亡人数,明显低于其他PTS交通工具,但是公共汽车一旦发生事故,程度一般十分严重,这就需要不断寻求提高汽车主动和被动安全性的解决方案。
文中对许多例子进行研究表明,事故中老年人和残疾人是最脆弱的群体,事故死亡总人数超过50%,同时研究表明,乘客(下车时的危害比上车更大)和行人(公共汽车站附近)也是事故易发群体。分析CARE数据库数据表明,大部分事故(车祸和死亡)都是由于公共汽车前方和右方的冲击引发,在涉及行人的事故中,22%左右由于司机操作不及时造成,而32%以上则是根本没有操作。
大部分事故都可以通过预警系统或紧急制动辅助系统来避免。实际上,在欧盟一项研究表明,前部和侧面碰撞预警系统可以将事故严重程度降低8%,并减少12%的迎面、追尾及车辆和行人的碰撞风险类型。
文中介绍了一种基于油门踏板的紧急制动高级驾驶员辅助系统(ADAS),并提出了一种高效算法:基于简化但准确的车辆模型,考虑驾驶员意图,高效地检测车辆周围徘徊的行人,进行风险评估,可以及时给出紧急制动信号。最后,文中使用城市情景模拟驾驶室和真实的公共汽车来验证所提出的ADAS的性能。结果显示,所提出的系统和算法,可显着提高汽车安全性、降低碰撞次数和风险。
6 基于V2X的汽车碰撞预警与避让系统[6]
避免碰撞是当前自动驾驶汽车研究中的一个重要研究领域。在汽车碰撞事故中,行人是最可能发生致命碰撞的弱势道路使用者之一。在汽车上的安装视线传感器(如相机、雷达和激光雷达)用来检测行人,可以在一定程度上避免碰撞事故发生。
但是,这些视线传感器在有些情况下(如恶劣天气),无法检测到行人。文中提出了一个基于专用短距离通信(DSRC)技术,实现汽车和行人间的V2X通信的汽车行人碰撞预警与避让系统。如果行人的存在和位置不能通过视线传感器确定,则可以用行人的智能手机进行行人定位,手机通过应用程序和汽车基于DSRC技术进行通信。
在碰撞预警与避让系统中,当汽车检测到将要和行人发生碰撞时,要么紧急制动,停止行驶;要么通过弹性带方法,实时局部的修改汽车轨迹,保证汽车以合理的轨迹行驶,进而绕过行人。
作者通过采用汽车系统动力学仿真软件Car-Sim,对装有该系统的自动驾驶汽车模型进行硬件在环仿真。硬件在环仿真结果证明了所提出的方法的有效性。将来文中会进一步完善避碰算法,并通过实际试验对系统进行测试。
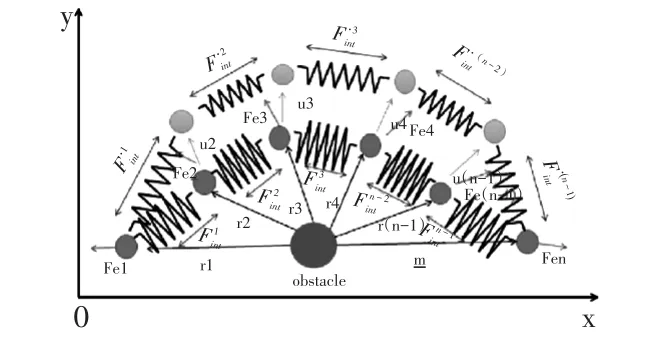
Fig.1: An initial path deformed by internal and external forces with thepresence of an obstacle.
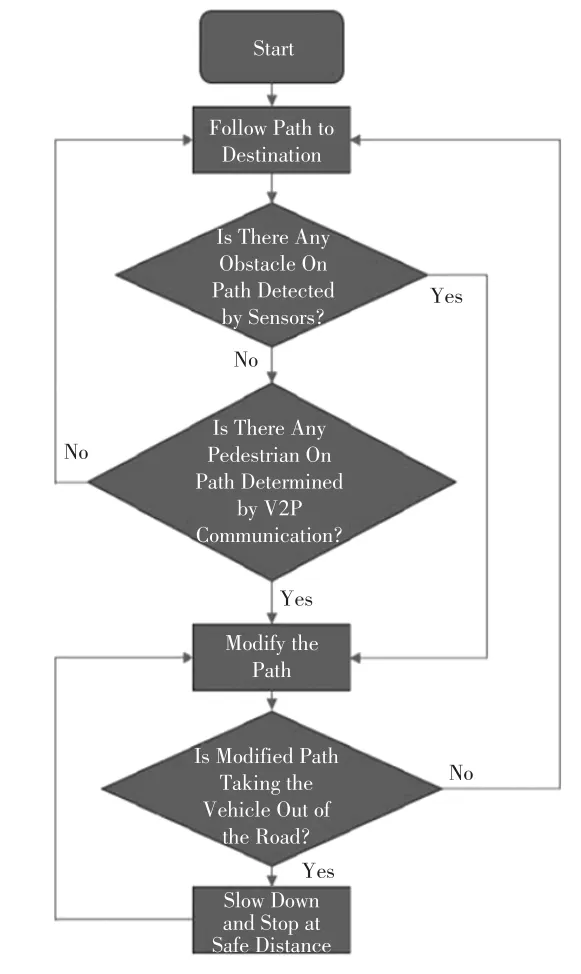
Fig.3: Flow chart of elastic band collision avoidancesystem.
[1]Qin L,Wang T.Design and research of automobile anti-collision warning system based on monocular vision sensor with license plate cooperative target[J].Multimedia Tools&Applications,2017,76(13):14815-14828.
[2]Chang BJ,Yu BH,Liang Y H.Colouringvehicle threat and minimising threat avoidance trajectory cost for adaptive vehicle collision defence system in active safe driving[J].Iet Intelligent Transport Systems,2017,11(6):309-318.
[3]Dieumet Denis,Benoit Thuilot,et al.Low cost active devices to estimate and prevent off-road vehicle from rollover.1st AXEMA-EurAgEng Conference"Intensive and environmentally friendly agriculture:an opportunity for innovation in machinery and systems",Paris,France,25 February 2017.pp.54-59
[4]Yang A,Naeem W,Fei M,et al.A cooperative formationbased collision avoidance approach for a group of autonomous vehicles[J].International Journal of Adaptive Control&Signal Processing,2017.
[5]Girbés V,Armesto L,Dols J,et al.An Active Safety System for Low-Speed Bus Braking Assistance[J].IEEE Transactions on Intelligent Transportation Systems,2017,PP(99):1-11.
[6]Gelbal SY,Arslan S,Wang H,et al.Elastic band based pedestrian collision avoidance using V2X communication[C]//Intelligent Vehicles Symposium.IEEE,2017:270-276.
猜你喜欢
财会学习(2022年7期)2022-11-13
中国交通信息化(2022年7期)2022-10-27
汽车实用技术(2021年9期)2021-05-26
医学食疗与健康(2021年27期)2021-05-13
意林(2021年5期)2021-04-18
环球时报(2019-12-30)2019-12-30
扬子江(2019年1期)2019-03-08
科学与财富(2019年3期)2019-02-28
东方教育(2017年17期)2017-10-31
小天使·一年级语数英综合(2017年6期)2017-06-07