一种基于改进SIFT算法的轨道板图像匹配方法*
2018-04-03 02:03张护望王诗宇郑廖默
组合机床与自动化加工技术 2018年3期
张护望,林 浒,王诗宇,郑廖默,冯 斌
(1.中国科学院大学,北京 100049;2.高档数控国家工程研究中心,沈阳 110168; 3.沈阳高精数控智能技术股份有限公司,沈阳 110168)
0 引言
图像拼接工作就是多幅图像中检测出部分相同兴趣区域,进而使其实现无缝拼接,进而得到一种全视角的完整图像。图像拼接现已普遍应用于工业移动机器人,医学,军事,机器视觉等[1-4]领域。图像拼接技术作为计算机视觉和图像处理研究的热点,吸引了很多国内外的学者和科技巨头公司对其进行大量研究和投资。
在计算机视觉,图像处理,三维重建,其中最重要的技术就是实现图像高精度配准[5],算法大体分为:基于区域的匹配算法基于特征的匹配算法。基于特征的算法,主要工作就是依据图像的特征点向量来计算图像之间的相似性关系,来判断图像匹配的兴趣区域。相比于区域匹配具有较低的计算复杂性和较高的稳定性。所以在图像配准技术中非常重要的地位。文献[6]提出了一种使用KLT跟踪技术, 精确确定各特征角点的位置,从而得到两幅图像之间精确的变换矩阵,角点的定义直接影响匹配结果;文献[7]采用SIFT特征点进行图像拼接;文献[8]采用PCA降维的方法,使用主元分析,使得128维向量降维到了36位向量,降低了SIFT算法的计算复杂度,但丢失了原始图像的部分信息,可能会影响结果。Smith等[9]提出了SUSAN算法,它不依赖于图像的导数,具备较强的抗噪声能力,但运算速度比较慢。Bay[9]提出了一种更快的加速算子SURF来替代SIFT算子。为了加快速度,SURF算子采用盒子滤波来替代高斯滤波。Moravec提出了使用灰度方差的技术检测角点,具备最小灰度变化的极大值点。研究者根据实际情况,对上述算法进行改进外,还根据存在的问题提出了很多的算法。国内的肖秩军等[10]提出了基于B样条模型的曲线特征点检测方法,样条函数的选择影响匹配效果。文献[11]首先对图像利用SIFT算法进行特征提取和与匹配,使用 RANSAC算法剔除不稳定的匹配结果,并精确计算图像间的变换参数。文献[12]提出了提取显著区域特征并生成SIFT特征向量,从而计算相似性实现图像匹配,注重显著区域的特征选择。文献[13]采用非对称特征搜索方式,实现方向性的特征匹配。都取得了很好的匹配效果,结果更加稳定。
本文提出了一种采用96维特征描述子,降低了128维向量的复杂度,尽可能的保留图像信息。并采用皮尔逊相关性评分进行配准分析的图像匹配算法,实验表明,文中算法可以得到较好的匹配结果,具有较高的稳定性。
1 SIFT原理
SIFT算法对于尺度变化,亮度变化,位置变化,视觉角度问题都有很高的鲁棒性。本文的应用场景对光照,拍摄角度要有较强的抗噪性,SIFT可以克服这些问题。SIFT主要思路是:首先要有图像的尺度空间表示,进而检测该图像不同尺度空间极值点,标记特征点的主方向,最后生成特征点描述子。
1.1 尺度空间极值点检测
首先应用不同尺度的高斯滤波函数G(x,y,σ)对原始图像I(x,y)作卷积运算,进行尺度变换。设(x,y)是原始图像I的函数表示,σ是尺度因子,则图像尺度空间L定义为:
L(x,y,σ)=G(x,y,σ)I(x,y)
(1)
其中,高斯函数为:
(2)
对输入图像进行降采样构建输入图像的高斯金字塔,相减得到高斯差分(DOG) 金字塔。公式(3)所示:
D(x,y,σ)=(G(x,y,kσ)-G(x,y,σ))×I(x,y)=
L(x,y,kσ)-L(x,y,kσ)
(3)
其中,参数k为相邻的图像之间的尺度因子比例。将相邻3层DOG图像的极值点确定为关键点。
1.2 特征点方向计算
前面检测的极值点中,会存在一些低对比度、不稳定的误匹配极值点。为了剔除这些不稳定点、提高匹配的稳定性、增强抗干扰能力,SIFT算法中采取曲线拟合的方法剔除低对比度的特征点,而且使用Hessian矩阵剔除不稳定的误匹配点。已经得到了每幅图像中的极值点,每个极值点都包含其尺度信息,利用以极值点所在邻域中像素的梯度方向统计分布为依据,为每个极值点指定主方向,旋转坐标轴,使算子具备旋转不变形。式(4)和式(5)中:
m(x,y)=
(4)
θ(x,y)=αtan2((L(x,y+1)-L(x,y-1))/
(L(x+1,y)-L(x-1,y)))
(5)
其中,L如公式(3)所示,尺度因子σ为每个极值点所在的尺度。
1.3 生成特征点描述子
为了保证旋转不变性,首先将关键点的方向指定为坐标轴方向。对于每一个特征点,在其相应的尺度空间,以每个特征点为中心所在的16×16大小的邻域窗口,采用高斯下降函数降低远离关键点中心的像素的权重。每个特征点将会得到4×4×8=128维的描述子。如图1所示,图中描述了一个关键点由4个种子点构成。

图像梯度 关键点描述图1 描述子构建
1.4 特征点匹配
得到两幅图像的SIFT向量,使用特征向量的欧式距离判断两幅图像中关键点的相似性。采用k-d数算法,提高了关键点特征向量的匹配速度。并且利用RANSAC算法对匹配结果进行筛选,剔除误匹配点。最终得到关键点的匹配结果。对于两幅图像,当达到一定的相似度时,就认为两幅图像有同一个兴趣区域。
2 改进的SIFT算法
数字图像在获取和传输过程中容易受到噪声污染和数据缺失等问题,但是图像处理过程中首要工作就是要去噪,噪声给后续的图像匹配和拼接等工作带来很多不可避免的问题。消除噪声是图像处理中不可或缺的一部分。主要就是图像预处理阶段进行图像滤波和平滑处理。所以对原始图像必须进行去噪处理和数据还原等操作,促使后期处理尽可能达到最优。传统的图像去噪算法有均值滤波,限幅滤波,高斯滤波,中值滤波等。本文采用双边滤波器来实现,尽可能的保留原图像信息内容。下面简单介绍双边滤波的相关内容。
2.1 双边滤波器
双边滤波(Bilateral filter)保住了边缘信息,去除了噪声,是一种非线性的图像滤波方式,是图像空间的邻近度和像素间相似度的一种调和方法,并且还结合了空域信息和灰度相似性。滤波器函数中由两部分组成。一部分由欧式几何距离来选取滤波器系数。另一部分是由像素间差值选取滤波器系数。
(6)
权重系数w(i,j,k,l) 取决于定义域核(公式(7))和值域核(公式(8))的乘积。
(7)
(8)
(9)
公式(9)中主要求取空间域与值域的差异。对原始图像进行预处理,本文使用双边滤波器,能够保存原始图像的边缘信息,最大程度的保留了原始信息,有利于后续操作。
2.2 内切降维
构建DOG,然而经过DOG检测得到的特征点,存在一些不稳定的特征点。使用拟和三维二次函数,从而确定关键点的位置信息和尺度信息,并且剔除低对比度的关键点和不稳定的边缘响应点,以提高匹配稳定性、增强抗噪声的能力。得到特征集之后,需要给每个特征点赋值一个128维方向参数。如图2所示,传统SIF算法得到的是128维向量,在原算法的基础上,本文采用的是16×16窗口的内切圆,只保留图中红色标记的小窗口中的种子点,去除了窗口的4角的种子点,共有12个种子点,每个种子点统计8个方向值。最后得到12×8=96维向量。为了进一步的降低光照变化对处理结果的影响,可以对特征向量进行归一化处理,则可以这样,96维向量中充分保留了特征点周围的像素信息,一定程度上降低了远离中心点像素的计算复杂度。对后续进行特征点匹配选取做准备。

图2 降维处理示意
2.3 相关系数评判匹配
本文经过降维处理之后,得到了每个特征点各自的96维向量。采用特征向量的皮尔逊相关系数相似度作为两幅图像中特征点的相似度判定方式。取图像1中的某个特征点,并找出其与图像2中皮尔逊相关系数大于阈值ratio的关键点,则接受这一对匹配点。皮尔逊相关系数公式(10)中,
(10)
公式中,R(X,Y)代表的意义是向量X和Y所代表的特征向量线性相关的强弱程度,其中包含-1≤R(X,Y)≤1,若R(X,Y)=0,表示两个特征向量非线性相关,若R(X,Y)<0表示两个特征向量负相关,若R(X,Y)>0则表示两个特征向量正相关,然而R(X,Y)的绝对值越大表明两个特征向量相关性越强。一般会对计算之后的相关系数取绝对值。我们只考虑是否相关就行。只要满足一定条件下的强相关条件就表示两个特征向量相关。此处表明接收特征点匹配。
本文中通过计算相关系数,得到相关系数矩阵,每个特征点都会有一个和其他特征点相关的评判系数。对每一个特征点相关系数进行降序排序,选取相关性最大的特征点,并且当前相关系数大于阈值,此特征点作为当前特征点的匹配结果,则接受这对特征匹配点。
3 实验结果与分析
以上步骤完成匹配后,得到的是两幅图像之间的特征点接收匹配的结果集合,我们根据最初匹配结果集选用RANSAC方法迭代寻找一个最佳单应矩阵,包含尽可能多的数据点。这样可以去除一些误匹配点,本文选取无砟轨道板部分图像,如图3是左图经过双边滤波器处理的结果,图4为右图经过双边滤波器处理的结果。图5和图6可以看出选取合适的阈值很重要,相关系数较小的阈值可能会存在误匹配情况,较大阈值可能存在丢失一部分正确的匹配结果,经过试验之后选取阈值为0.6可以看出结果理想。利用本文算法得到的匹配结果一致。提高了匹配精度和稳定性。
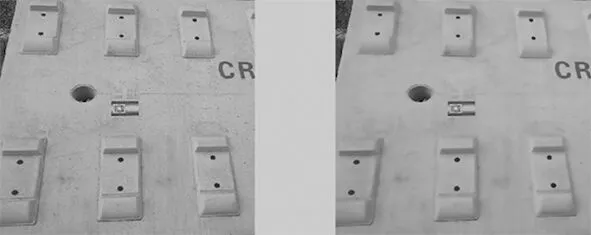
图3 左图双边滤波器处理结果

图4 右图经过双边滤波器处理结果

图5 相关系数阈值为0.5

图6 相关系数为0.6
实验结果证明,改进之后的算法,当阈值为0.5的时候,匹配结果会出现一些误匹配点,当阈值为0.6时,匹配结果没有出现误匹配特征点。所以改进之后的算法,在保证特征点个数的情况下,也满足特征匹配的要求,也经过了多次试验,匹配结果稳定。
4 结束语
本文首先通过双边滤波器处理输入图像,再进行特征点检测操作,利用内切圈去除了远离中心点的像素值,减少了计算复杂度,得到特征点向量,最后通过皮尔逊相关性评价是否接受匹配。此方法减少了特征点的错误匹配,通过降维的方法处理特征向量提高了整个系统的处理速度。进行匹配时对相关系数进行排序,选取相关性最大的作为新的特征匹配点。用RANSAC迭代的方法得到最优的匹配结果集。本文中采用的96维向量不免会丢失一些图像信息,实验结果表明,在相关系数阈值为0.6时,匹配结果不存在误匹配的现象,满足轨道板图像匹配的要求。
[参考文献]
[1] Chen Y, Xu M, Liu HL, et al. An improved image mosaic based on Canny edge and an 18-dimensional descriptor[J]. Optik-International Journal for Light and Electron Optics 2014,125(17):4745-4750.
[2] Wu ZG, Wang MJ, Wang YQ. Image mosaic technique based on the information of edge [J]. International Conference on Digital Manufacturing & AutomationMauceri, 2012:482-484.
[3] Zhang K, Li XZ, Zhang J. A Robust Point-Matching Algorithm for Remote Sensing Image Registration[J]. Geoscience & Remote Sensing Letters IEEE,2013,11(2):469-473.
[4] 曹世翔, 江洁, 张广军, 等. 边缘特征点的多分辨率图像拼接[J]. 计算机研究与发展,2011,48(9):1788-1793.
[5] 孟龙晖. 一种大壁虎脑图谱三维重建的新方法及实现[D].南京:南京航空航天大学,2011.
[6] 胡社教, 葛西旺, 陈宗海. 基于角点特征的KLT跟踪全景图像拼接算法[J]. 系统仿真学报,2007,19(8):1742-1753.
[7] 高华. 基于SIFT图像拼接技术研究[D]. 重庆:重庆交通大学,2012.
[8] Yan K, Sukthankar R. PCA-SIFT: a more distinctive representation for local image descriptors[J]. 2004,2(2):506-513.
[9] Bay H, Ess A, Tuytelaars T, et al. Speeded-Up Robust Features (SURF)[J]. Computer Vision & Image Understanding 2008,110(3):346-359.
[10] 肖轶军, 丁明跃. 基于B样条模型的曲线特征点检测法[J]. 数据采集与处理,2000,15(4):422-425.
[11] 常青. 基于SIFT和RANSAC的特征图像匹配方法[J]. 华东理工大学学报:自然科学版,2012,38(6):97-101.
[12] 尹春霞, 徐德, 李成荣, 等. 基于显著图的SIFT特征检测与匹配[J]. 计算机工程,2012,38(16):189-191.
[13] 杜振龙, 杨凡, 李晓丽, 等. 利用SIFT特征的非对称匹配图像拼接盲检测[J]. 中国图象图形学报,2013,18(4):442-449.
(编辑李秀敏)
猜你喜欢
九江职业技术学院学报(2022年1期)2022-12-02
保定学院学报(2022年2期)2022-04-07
今日农业(2021年8期)2021-11-28
建材发展导向(2021年11期)2021-07-28
电子制作(2019年11期)2019-07-04
数学大世界(2019年7期)2019-05-28
电子制作(2018年16期)2018-09-26
电子制作(2018年1期)2018-04-04
中华建设(2017年1期)2017-06-07
火控雷达技术(2016年2期)2016-02-06