四索驱动并联机构的模态实验
2018-04-16 05:53武云飞汤奥斐郭晓玲纪磊磊
西安理工大学学报 2018年1期
武云飞, 汤奥斐, 郭晓玲, 郑 腾, 纪磊磊
(西安理工大学 机械与精密仪器工程学院, 陕西 西安 710048)
索驱动并联机构是一类特殊的并联机构,其末端动平台通过柔索与静平台连接,它由索长的变化来实现其位置和姿态的改变[1]。索驱动并联机构具有结构简单、工作空间大、惯性小和运动速度快等优点[2],目前已经应用于大射电望远镜[3]、风洞实验系统[4]、运动康复训练器[5]等方面。
索作为一种高效地承受拉力的结构构件,广泛应用于桥梁、大跨度结构等工程中,索具有以下不同于刚性构件的特点:索只能承受拉力,没有抗压刚度;伴随着较小的应变和应力,索会产生很大的位移[6]。由于索的柔性与弹性,使得索的振动很大程度上取决于索的拉力大小。在动平台运动过程中,索易受到外扰发生振动,造成精度下降甚至失稳,因此,有必要对索的动态特性进行分析和研究。
近几年,国内外学者对索的振动进行了相关研究。刘志华等[7]通过绳索受力频谱分析实验,得到了索并联机构的固有频率。杜敬利等[8,9]在分析大射电望远镜系统时,对索的刚度进行了研究。DIAO等[10]分析了索并联机构中索的横向振动和轴向振动,指出轴向振动远大于横向振动。然而,从实际应用角度来看,有必要对绳索的拉力进行测量,并进一步研究索驱动并联机构的振动特性。
目前,索力的测试方法有直接测量法和间接测量法[10]。直接测量法有压力表测定法、压力传感器测定法等方法。间接测量法是外力使索产生初始位移,应用传感器记录索的自由振动,通过索的振频间接计算出索力,这种方法不会破坏原有的机械结构。
由于索只能承受拉力,不能承受压力,一旦其中一根出现拉力为零,将破坏整个系统的静态平衡而导致结构失稳,因此,必须对索驱动并联机构的静态问题进行研究。本文针对平面四索驱动并联机构,采用间接测量法测得索的振动,并根据弦线理论获得索的内张力。在此基础上,建立系统的有限元模型,并带入索的内张力作为索力初始条件,以此来模拟实际系统的模态。最后,通过动平台实验模态与有限元模态结果比较,验证索力测量的正确性以及有限元模型的合理性。
1 WDPM的结构及实验设计
1.1 结构模型
图1为平面四索驱动并联机构简图。平面四索驱动并联机构由动平台和四根柔索组成,索i(i取1~4)的一端连接电机绕线端Ai,经定滑轮Bi端连接到动平台Pi点,Pi表示绳索与动平台的连接点,Bi表示绳索与固定端的连接点。定义全局坐标系为OXY,其原点位于正方形B1B2B3B4的中心;定义局部坐标系为oxy,其原点位于动平台P1P2P3P4的中心;X轴、Y轴与x轴、y轴位于同一平面,动平台位于中心时,全局坐标系OXY与局部坐标系oxy重合。

图1 平面四索驱动并联机构简图Fig.1 Diagram of plane four-wire driven parallelmechanism
1.2 张力标定及WDPM模态实验原理
根据弦的振动测量原理,得到索力与固有频率的关系为:
F=4qL2f2
(1)
式中,F为索的拉力(N);q为索的单位长度质量(kg/m);L为索的长度(m);f为振动频率(Hz)。
在一根绳索附近作用一个瞬时冲击力,绳索将会做自由衰减振动。在衰减振动过程中,采集绳索振动位移数据,通过对时域数据进行FFT变换,即可获得绳索的固有频率。采用振动法测索力,设备均可重复使用,仪器安装也很方便,所以振动法测索力得到了广泛的应用。张力标定所需的仪器主要包括非接触式激光测距仪和LK-Navigator数据采集及处理系统,其中,LK-Navigator数据采集及处理系统可以进行采样设置、显示及保存索的振动位移数据等。
WDPM模态实验主要是对系统结构施加激励,通过传感器测量激振力及测点的响应,估计其频响函数,并识别系统的模态参数。系统的模态实验分析主要包括LMS数据采集和模态分析两部分。本实验采用多点激励单点响应的方法,利用装有力传感器的力锤依次对各点进行瞬时锤击激励,同时单点测量动平台的加速度信号。
模态实验所需的仪器设备主要有被测系统(WDPM)、激励设备、LMS数据采集设备及分析软件等。被测系统由WDPM运动部件、运动控制器、伺服电机等组成。激励设备是根据不同的激励方式来选择的,对于任何能够引起结构振动的信号都可以作为激励信号。本实验激励设备采用的是PCB086C03力锤(带有力传感器),力锤具有测试方便、实验效率高、对系统动态性能影响小等优点。数据采集设备包括:PCB333B30单向压电式加速度传感器、LMS SCM09采集前端。其中加速度传感器将采集到的信号传递给多通道数据采集前端进行处理。数据分析系统为LMS Test.lab模态分析软件。LMS Test.lab模态分析软件将多通道采集前端采集到的信号进行模态参数识别,并模拟结构的模态振型变化趋势。模态实验的测试系统如图2所示。

图2 模态测试系统简图Fig.2 Diagram of modal testing system
2 实验测试
2.1 索张力的标定
索张力标定的实验方案,如图1所示。由于定滑轮Bi两端的索力是相等的,而实验中索AiBi的振动比BiPi容易测量,所以实验中标定的是索AiBi的张力值。平面四索驱动并联机构的结构参数如表1所示。

表1 结构参数Tab.1 Structual parameters
测试的具体步骤为:先使4根索张紧,并控制动平台运动到(5,5)点坐标,夹紧索i的Bi端,并敲击接近固定端的索,使其获得一个瞬时冲击力,同时,采用测头型号为LK-G400的基恩士(KEYENCE)LK-G激光测距仪跟踪索i的振动,实时记录索的振
动并做频谱分析,得到索i的振动基频。测试实验平台如图3所示。

图3 实验平台Fig.3 Experiment platform
2.2 索系的张力标定实验与分析
实验中,对每根索各进行5组测量,由上述测量方法测得4根索振动数据的时域信号。由于实际测量过程中,存在环境对索的影响,为尽量减小外界环境对实验结果的影响,对每组测量数据使用Butterworth滤波器进行滤波处理,得到的实域信号及频域信号如图4所示。

图4 索的时域与频域信号Fig.4 Time domain and frequency domain signals of wires
如图4所示,提取滤波后索的一阶固有频率,得到1组4根索的固有频率。由于测试过程中存在一定的误差,因而本次实验采用相同的测试和数据处理方法进行5组实验,通过5组实验求平均值来减小测试过程中的误差。5组实验及其平均值的结果如表2所示。
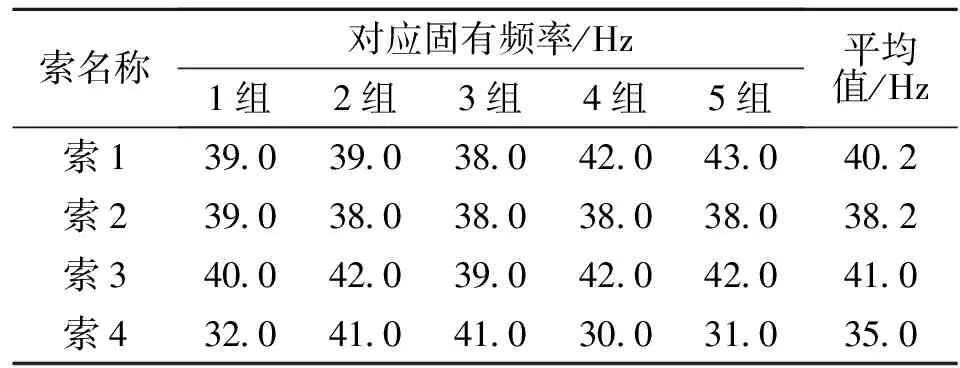
表2 单根索固有频率Tab.2 Natural frequency of single wire
将表2中各索的频率均值代入式(1),分别计算出四根索的拉力,从而得到有限元模型中初始拉力的值,索的拉力分别为:F1=17.39 N、F2=15.70 N、F3=18.08 N、F4=13.18 N。理论上,索1的拉力应略小于索3的拉力,索2的拉力应和索4的拉力大小相等;但是实际测量中,索2和索4不完全相等,这是因为加工中结构不完全对称以及加工表面摩擦力不均匀导致的张力不对称性。
本文有限元模型采用LINK8单元来模拟定滑轮和动平台,由于柔索只能承受拉力不能承受压力,所以采用LINK10单元模拟柔索。将测得的索力带入建立的有限元模型中,如图5所示。对有限元模型进行模态分析求解,求得一阶频率f仿真=57.36 Hz,振型为沿着索1、索3的绳长方向拉伸。
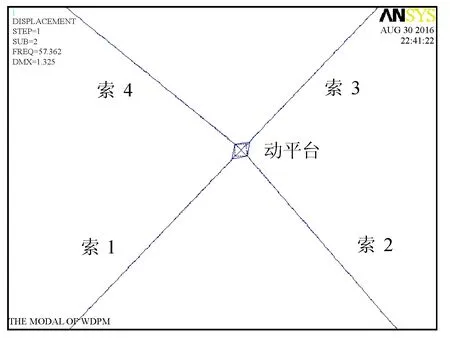
图5 有限元模型Fig.5 Finite element model
2.3 模态测试实验与分析
在WDPM模态实验中,分别对选取的测点进行X、Y两个方向的敲击。通过LMS系统测量节点获得的频响函数,使用PolyMAX法进行参数识别,并得到与测量数据相一致的模态参数。PolyMAX法是一种快速频域最小二乘估计法,采用的是离散时间频域模型,其特点是以频响函数测量数据为基础,即使是未得到充分激励的模态也能很好地识别出来。在对每个激励点敲击时,对应测点的频响函数取3次有效值进行平均。取激励点的全部频响函数的平均值,并根据综合频响函数,确定有效的频率带宽为0~300 Hz。对系统进行分析,得到一阶固有频率f实验=62.82 Hz,实验结果是1阶拉伸振动,主要表现为沿索1和索3方向的拉伸变形,并且索2和索4有轻微的拉伸变形。
有限元模型分析结果与实验结果基本一致,频率误差在10%以内,第一阶振型一致,所以张力标定实验是有效的,有限元模型是合理的。
3 结 语
本文以平面四索驱动并联机构为研究对象,分析了其工作模态的仿真及实验情况,采用振动法测量出单根索的振动基频,标定出索的张力,该方法对于张紧的短跨度绳索的张力标定具有重要的实践意义。同时,本文基于LMS测试系统,完成了四索的WDPM系统的模态测试,测试结果显示:理论分析与实验结果误差在10%以内,因此,构建的有限元模型是合理的。该实验方法测量的是动平台在某一固定位置时的模态问题,属于静态分析,同样适用于带有柔索机构的静态实验分析。
参考文献:
[1] 汤奥斐. 大跨度柔索驱动并联机器人关键问题分析及模型实验研究 [D]. 西安: 西安电子科技大学, 2007.
TANG Aofei. Analysis of key problems and model experimental research on a long-span wire driven parallel robot [D]. Xi’an: Xidian University, 2007.
[2] 郑亚青, 刘雄伟. 绳牵引并联机构的研究概况与发展趋势 [J]. 中国机械工程, 2003, 14(9): 94-96.
ZHENG Yaqing, LIU Xiongwei. Research survey and development tendency of wire-driven parallel manipulators [J]. China Mechanical Engineering, 2003, 14(9): 94-96.
[3] 段宝岩, 苏玉鑫, 仇原鹰, 等, 新一代大射电望远镜机电光一体化设计研究 [J]. 中国机械工程, 1999, 10(9): 1002-1004.
DUAN Baoyan, SU Yuxin, QIU Yuanying, et al. An integration of electromechanical design for a new generation of large radio telescope [J]. China Mechanical Engineering, 1999, 10(9): 1002-1004.
[4] 姚裕, 吴洪涛. 3-DOF转动柔索驱动风洞机构的力雅可比矩阵 [J]. 南京航空航天大学学报, 2011, 43(1): 75-78.
YAO Yu, WU Hongtao. Force jacobian matrix for 3-DOF cable-driven mechanism with rotation in wind tunnel [J]. Journal of Nanjing University of Aeronautics. & Astronautics, 2011, 43(1): 75-78.
[5] MORIZONO T, KURAHASHI K, KAWAMURA S. Realization of a virtual sports training system with parallel wire mechanism [C]//IEEE International Conference on Robotics and Automation, April, 1997, Albuquerque, New Mexico: Proceedings. IEEE Xplore. c1997: 3025-3030.
[6] 张其林. 索和膜结构 [M]. 上海: 同济大学出版社, 2002.
[7] 刘志华, 唐晓强, 邵珠峰, 等. 6自由度索并联机构的振动特性 [J]. 机械工程学报, 2013, 49(3): 49-55.
LIU Zhihua, TANG Xiaoqiang, SHAO Zhufeng, et al. Vibration characteristic of 6-DOF cable-driven parallel manipulator [J]. Journal of Mechanical Engineering, 2013, 49(3): 49-55.
[8] 李辉, 朱文白. 柔索牵引并联机构的静刚度分析 [J]. 机械工程学报, 2010, 46(3): 8-16.
LI Hui, ZHU Wenbai. Static stiffness analysis of flexible-cable-driven parallel mechanism [J]. Journal of Mechanical Engineering, 2010, 46(3): 8-16.
[9] 杜敬利, 保宏, 崔传贞. 基于等效模型的索牵引并联机器人的刚度分析 [J]. 工程力学, 2011, 28(5): 194-199.
DU Jingli, BAO Hong, CUI Chuanzhen. Stiffness analysis of cable-driven parallel manipulators using equivalent model [J]. Engineering Mechanics, 2011, 28(5): 194-199.
[10] DIAO X, MA O. Vibration analysis of cable-driven parallel manipulators [J]. Multibody System Dynamics, 2009, 21(4): 347-360.
猜你喜欢
成都信息工程大学学报(2022年4期)2022-11-18
昆明医科大学学报(2022年3期)2022-04-19
中学生数理化·中考版(2021年10期)2021-11-22
中国传媒大学学报(自然科学版)(2021年1期)2021-06-09
航空发动机(2020年3期)2020-07-24
发明与创新·中学生(2018年2期)2018-02-07
时代英语·高二(2017年4期)2017-08-11
天津体育学院学报(2016年3期)2016-12-18
中国环境监察(2016年7期)2016-10-23
通信电源技术(2016年1期)2016-04-16