
基于DSP的旋转磁场电磁跟踪系统设计
2018-04-18 05:30盛昶沙敏邬小玫方祖祥
中国医疗器械杂志 2018年2期
【作 者】盛昶,沙敏,邬小玫,方祖祥
复旦大学电子工程系,上海市,200433
0 引言
微创手术具有创口小、出血少、疼痛轻、恢复快等优点,在现代医学中得到了广泛的应用。但是在微创手术过程中医生无法通过微小的创口直接观察进入人体内的器械及病灶,从而需要在手术导航系统的帮助下跟踪手术器械,确定手术器械相对于病人解剖结构的具体位置,从而使外科手术更快速、更精确、更安全[1-3]。目前常用的手术导航工具主要有光学定位、医学图像、超声波和电磁跟踪[4-6]。相对于其他导航工具,电磁导航主要有两方面的优势: ①人体磁导率与真空近似一致,身体组织的特性不会影响对体内目标物体的跟踪;②无光路遮挡问题,并且对人体无电离伤害。早在1997年,Ben-Haim就发明了一种三维电磁跟踪,并成功应用到CARTO三维心内膜标测系统中[7]。目前电磁跟踪系统多采用准静磁线圈作为磁场源[8-9],并将磁场源等效为某种模型(如磁偶极子模型),并根据磁场源和传感器之间的耦合关系,利用相关迭代算法来对传感器进行定位[10-11]。由于理论的磁场源模型和磁场源实际分布存在差异,同时采用迭代算法,不仅耗时较长,而且可能陷入局部极值而增加定位误差。
本课题组根据磁棒磁感应强度分布在轴向上有最大值,且方向沿轴线方向的现象,提出了一种基于双磁棒旋转搜索的电磁跟踪方法[12-14]。该方法工作稳定,每次均可实现系统对传感器的可靠定位。 基于该方法,丁宁等[15]用步进电机带动磁棒在空间中遍历旋转的工作方式实现了对三轴磁传感器的定位,但是定位速度和搜索方式受到步进电机旋转轴和旋转速度的制约。为提高系统的实时性和搜索的灵活性,本课题组又提出了电控旋转磁场的工作方式,即将磁场源改为三轴相互正交且中心重合的线圈,通过控制三轴激励电流的强度,实现磁场源合成的最大磁感应强度矢量的旋转,并对这种方法进行了仿真研究[16]。本文通过设计和搭建基于数字信号处理器(Digital Signal Processor, DSP)的电控旋转磁场的电磁跟踪系统,进一步验证了该方法的可行性。
1 基于电控旋转磁场的电磁跟踪方法
基于旋转磁场定位方法的原理是:控制间距为D且初始状态已知的磁场源1(Source 1)和磁场源2(Source 2)产生的最大磁感应强度在空间中旋转,当磁传感器分别检测到磁场源1和磁场源2产生的最大磁感应强度时,表明两个磁场源产生的最大磁感应强度矢量均指向传感器,如图1所示。根据此时两个磁场源的旋转角(α, β)、(α, β)间距D,用简单的几何方法即可计算出磁传感器的空间位置。进一步,根据此时最大磁感应强度矢量的指向,还可以计算得到磁传感器的姿态。由上述可见,基于旋转磁场定位方法的关键是获得磁场源产生的最大磁感应强度矢量指向磁传感器时的两组旋转角。

图1 旋转磁场定位算法原理图Fig.1 Rotating magnetic fi eld localization algorithm
2 系统设计
2.1 系统架构设计
为了简化问题,本文设计的基于旋转磁场的电磁跟踪系统的搜索策略是最基本的两正交面搜索策略:即先控制磁场源产生的最大磁感应强度矢量在水平面旋转180o,找到磁传感器检测到最大值时所对应的磁感应强度矢量旋转角(即水平旋转角);再控制最大磁感应强度矢量在水平旋转角方向垂直旋转90o,找到磁传感器检测到最大值时所对应的磁感应强度矢量旋转角(即垂直旋转角);这样可实现最大磁感应强度矢量在四分之一空间的任意指向,对在此空间运动的传感器进行定位。系统架构如图2所示,主要由DSP模块、磁场源模块、可控恒流源模块、磁传感器和ADC接口电路以及上位机组成。DSP控制其它各模块的工作,对采集到的信号进行处理,并将结果传送到上位机。

图2 旋转磁场的电磁跟踪系统组成框图Fig.2 Rotating magnetic fi eld tracking system structure diagram
2.2 DSP模块
选用德州仪器(TI)的TMS320F28335,该芯片具有32位浮点处理单元和150 MHz的高速处理能力,可以满足本文算法对实时计算的要求。DSP实现的功能包括:控制可控恒流源模块为三轴正交磁场源提供合适的激励电流;控制切换开关的动作,进而使组成两个磁场源的六个线圈按照一定的策略依次被激励;控制传感器置复位脉冲;对采集到的磁感应强度信号进行处理,并进行定位计算;与上位机进行通信,传输定位数据并显示(图3)。
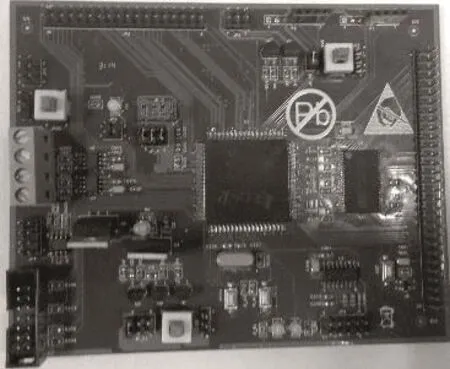
图3 DSP模块图Fig.3 DSP module diagram
对切换开关和可控恒流源的时序控制,如图4所示。当时序脉冲处于高电平时,切换开关被导通,则与此切换开关相对应的线圈将被激励。当一轴线圈全部激励完成准备激励下一轴线圈的时候,设置2 ms的死区,直到DSP输出的触发信号到来,恒流源才开始激励下一轴线圈。设置死区的目的是避免在同一时刻激励两个线圈,保证系统工作稳定可靠。
2.3 磁场源模块
磁场源模块包括磁场源1和磁场源2,分别由三个正交线圈组成(图5)。磁芯材料为镍锌铁氧体,相对磁导率为800。每个磁芯缠绕570匝线圈,每轴缠绕1 140匝线圈;缠绕线圈的导线采用直径为 0.35 mm的漆包线。
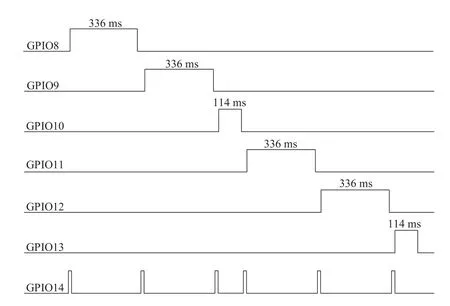
图4 DSP控制时序图Fig.4 DSP control timing diagram
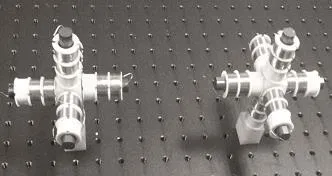
图5 磁场源模块图Fig.5 Magnetic fi eld module
2.4 可控恒流源模块
本文采用PBZ40-10(KIKUSU公司)对磁场源施加直流脉冲激励。该恒流源具有响应快(35 μs)、可远程控制的优点。由于磁场源1和磁场源2的结构、激励电流、搜索策略完全相同,因此以磁场源1为例说明其工作过程。
由于PBZ40-10只能输出一路恒流源,无法同时激励三个线圈,因此本文将三轴线圈激励电流值编程存储在恒流源中,通过使用Trigger和Pause命令对恒流源远程控制。首先DSP的脉冲信号使恒流源启动并开始激励一轴线圈,当该轴线圈激励完成后,电流源处于等待状态,输出电流为0 A。在此期间,开关切换电路断开已经激励完成的线圈导通下一轴要激励的线圈。当DSP发出的下一个脉冲信号到来时,恒流源重新启动输出,激励对应的线圈。最终磁场源1的三轴线圈依次被激励。
经过测试,线圈的磁饱和电流I=0.7 A,输出电流分辨率为0.000 1 A 。当旋转角为(α, β)时,磁场源1的X轴线圈、Y轴线圈、Z轴线圈激励电流强度按照公式(1)计算。
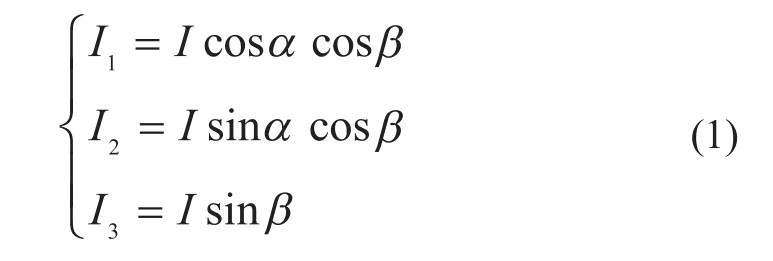
本文水平旋转角扫描范围α∈[0, π],垂直旋转角β∈[0, π/2],步长均为5o,激励脉冲宽度为6 ms。搜索磁传感器分为两步,第一步:令垂直旋转角β=0,按照公式(1)计算出α从0o到180o以5o为步长变化时与各水平旋转角对应的激励电流强度;磁传感器检测到单独激励X轴线圈和Y轴线圈时的磁感应强度数据,通过矢量合成和下文所述曲线拟合算法,找到最大磁感应强度点及所对应的水平旋转角。第二步:根据第一步所得的水平旋转角α,按照公式(1)计算出β从0o到90o以5o为步长变化时与各垂直旋转角对应的激励电流强度,磁传感器检测到单独激励X轴线圈、Y轴线圈和Z轴线圈时的磁感应强度数据,通过矢量合成和下文所述曲线拟合算法,找到最大磁感应强度点及所对应的垂直旋转角。
由于第二步中激励电流的强度与第一步中水平旋转角的大小有关,为了简化问题,避免激励电流的实时计算,本文将第二步中激励X轴线圈电流I1中的α设为0°,激励Y轴线圈电流I2中的α设为90°,最后计算出各垂直旋转角对应的激励电流强度并存储在恒流源中。根据毕奥-萨伐尔定律,假设实际测试中水平旋转角为α',且K1=cos α',K2=sin α',则只需要将上述第二步中激励X轴线圈时磁传感器检测到的磁感应强度乘以系数K1,将上述第二步中激励Y轴线圈时磁传感检测到的磁感应强度乘以系数K2。
2.5 传感器及ADC接口电路
选用HMC2003(Honeywell公司)三轴磁传感器。该传感器可以输出四路模拟信号(X轴、Y轴、Z轴及参考端 ),输出范围为0.5~4.5 V,灵敏度为1 V/Gs,分辨率为40~70 μGs,参考端信号为磁感应强度为0时的输出电压(标准情况下为2.5 V),本文中将测量值减去此值来提高传感器的测量精度。
实验时将传感器固定在电控微动平台Syntron 42BYG250C上,通过微动平台控制软件CH-hall控制传感器(追踪目标)的移动。
ADC接口电路包括信号调理模块和ADC模块(图6)。信号调理模块对采集到的信号进行滤波和放大。滤波电路采用2 kHz的二阶有源低通滤波器和50 Hz二阶有源带阻滤波,从而减少高频和工频干扰。放大电路将信号幅度调整到与ADC输入信号幅度要求相匹配。ADC模块TI公司的ADS1115最大采样率为860 sample/s。
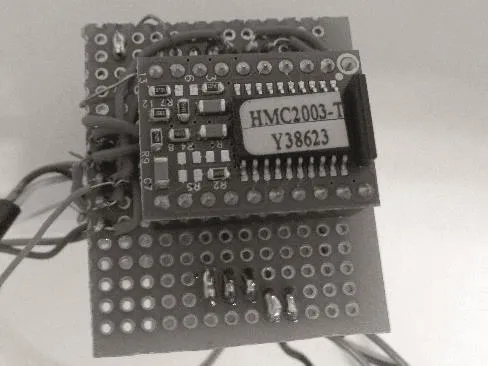
图6 传感器及ADC接口电路Fig.6 Sensor and ADC interface circuit
3 系统实验测试和结果
3.1 系统工作流程
系统通过DSP的主程序控制实现(图7)整个定位过程。系统上电后,先进行初始化,然后激励磁场源线圈,传感器及ADC接口电路采样并将经过信号预处理的信号传送至DSP,当两个磁场源的六轴线圈均激励完成,控制处理模块计算传感器位置和姿态,并将传感器的空间位置及姿态在全局坐标系1中的坐标数据通过串口传送到计算机,进行显示及存储。
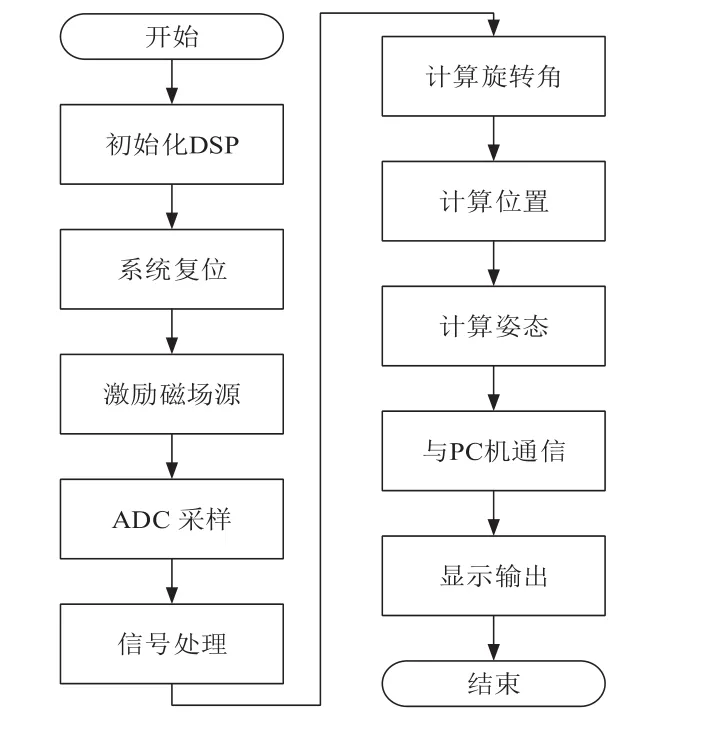
图7 DSP主程序流程图Fig.7 DSP main program fl ow diagram
图8为ADC采样流程图,为了减少环境中的噪声对信号的干扰,采用多次采样取均值的方法。在激励磁场源前,先测量环境中的磁感应强度,然后激励磁场源。采样5个点,减掉参考端电压(第4个通道的电压)和环境中的磁感应强度,最后求取均值,得到磁场源所产生的磁感应强度的值。
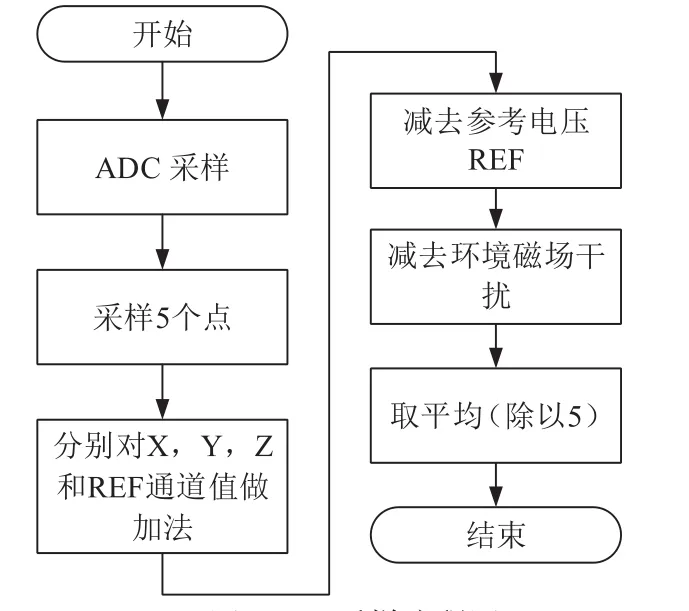
图8 ADC采样流程图Fig.8 ADC sampling fl ow chart
3.2 实验方法
将磁场源1和磁场源2固定在光学平台上,两磁场源中心点之间的距离设置为D=0.3 m,两磁场源的相应线圈保持平行。将磁传感器固定在微动平台上,并通过控制软件CH-hall将传感器移动到空间某一位置。本文任意选取了7个位置,并对每一个位置点进行5次测试。将5次测量结果的均值作为该位置处的真实值”,用于计算系统定位的相对误差。
3.3 曲线拟合计算磁感应强度最大值对应的旋转角
在实际测量过程中,各种干扰和噪声会影响磁感应强度最大值测量的准确性,进而影响定位精度;同时旋转角是以5o为步长采样得到的,导致采样数据的空间分布是离散的,故磁感应强度的峰值检测中存在步长因素带来的误差。本文提出了一种7阶多项式函数曲线拟合的方案解决上述问题。
为了更好地反映误差的实际情况,本文采用平均绝对误差(表1、图9)。将每点误差绝对值化后再求平均,避免出现正负相抵消的情况。
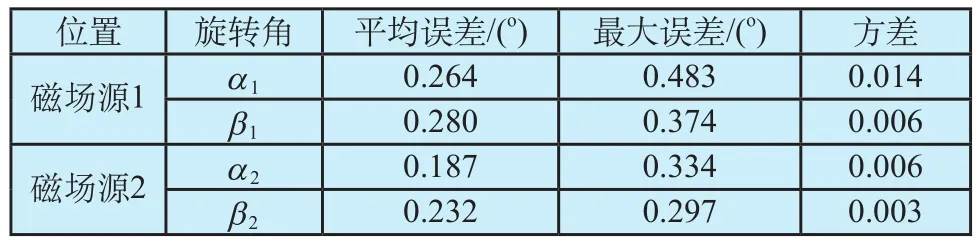
表1 两个磁场源旋转角统计误差Tab.1 Statistical errors of rotation angles of two magnetic fi eld sources
3.4 空间位置误差计算
位置误差利用传感器真实值和实测值之间的欧式距离计算,见公式(2):

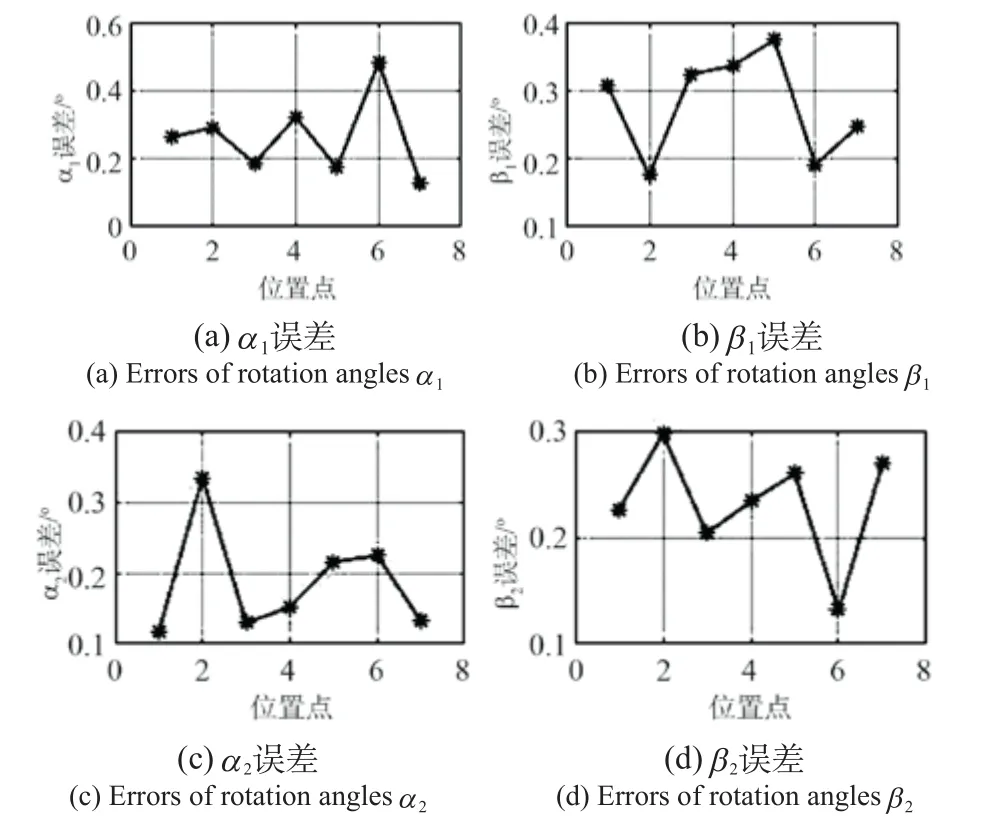
图9 旋转角统计误差Fig.9 Statistical errors of rotation angles

表2 位置和姿态统计误差Tab.2 Statistical errors of positions and orientations
3.5 空间姿态误差计算
单个欧拉角由于存在奇点一般不作为整体误差的评估参数。本文采用旋转角△φ度量方向误差,表征从传感器真实方向到测量方向所需要旋转的角度。旋转角可以通过旋转矩阵转换为四元函数实现,见计算公式(3)~(5),其中aij是矩阵A的第i行j列元素。
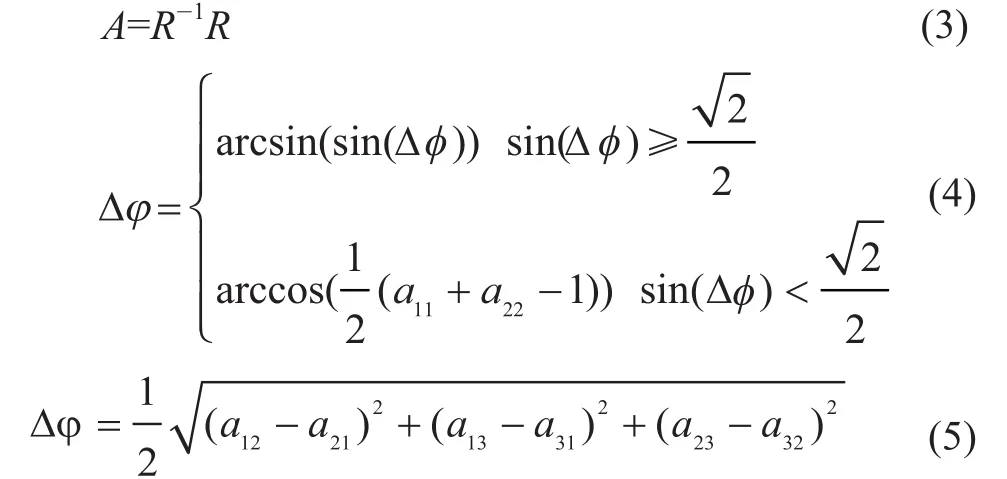
姿态误差统计结果如表2所示。
4 讨论与结论
本文设计实现了一个基于电控旋转磁场的定位/跟踪系统并进行了初步的测试。在测试过程中,系统工作稳定,每次都能实现对目标的准确定位。
(1)在定位速度上,系统完成对空间中一点定位需要搜索262步,线圈需要切换5次,每一个步长内激励的时间为6 ms,所以所需时间为1.572 s。而采用步进电机带动磁棒旋转搜索的方法时,完成一次完整定位的时间在4 min左右,因此本系统在定位速度上有较大的提高。
(2)在搜索策略上,本系统采用先在水平面上扫描再在垂直面上扫描,并且步长均为5o的方式。基于电控旋转磁场搜索的灵活性,还可通过优化搜索策略进一步提高系统性能。
(3)为了加快设计进度,本文选用了只有一路输出的商用恒流源,每次只能激励一个线圈,通过矢量合成算法得到磁场源的最大磁感应强度矢量。这种工作方式导致系统搜索时间延长2倍以上,同时在矢量合成的时候也存在误差。因此设计性能优良恒流源使系统能同时激励多路线圈将是下一步研究的重点。
我们将进一步优化硬件设计提高系统的定位精度,寻找更合适的搜索策略提高系统的跟踪的性能速度,以满足临床手术的要求。
[1]Nolte L P, Beutler T. Basic principles of CAOS[J]. Injury, 2004,35(1): 6-16.
[2]田和强, 吴冬梅, 王继虎, 等. 基于电磁定位的手术导航探针可视化与实时跟踪技术[J]. 机器人, 2011, 33(1): 59-65.
[3] 林艳萍, 张文强, 王成焘. 手术导航系统中器械的可视化与实时跟踪[J]. 生物医学工程杂志, 2006, 23(5): 995-998
[4]Nakamoto M, Nakada K,Sato Y, et al. Intraoperative magnetic tracker calibration using a magneto-optic hybrid tracker for 3-D ultrasound-based navigation in laparoscopic surgery[J]. IEEE Trans Med Imaging, 2008, 27(2): 255-270.
[5]Vilsmeier S, Birkenbach R. Process and apparatus for image guided treatment with an integration of X-ray detection and navigation system: US, 6527443[P]. 2003.
[6]Kosugi Y, Watanabe E,Goto J,et al. An articulated neurosurgical navigation system using MRI and CT images[J]. IEEE Trans Biomed Eng, 1988, 35(2): 147-152.
[7]Gepstein L, Hayam G,Ben-Haim S A. A novel method for nonf l uoroscopic catheter-based electroanatomical mapping of the heart[J]. Circulation, 1997, 95(6): 1611-1622.
[8]Paperno E,Sasada I,Leonovich E. A new method for magnetic position and orientation tracking[J]. IEEE Trans Magn,2001,37(4): 1938-1940.
[9]Raab F H, Blood E B,Steiner T O, et al. Magnetic position and orientation tracking system[J]. IEEE Trans Aerosp Electron Syst,1979 (5): 709-718.
[10] Nara T, Suzuki S, Ando S. A closed-form formula for magnetic dipole localization by measurement of its magnetic fi eld and spatial gradients[J]. IEEE Trans Magn, 2006, 42(10): 3291-3293.
[11] Hansen P K. Method and apparatus for position and orientation measurement using a magnetic field and retransmission: US,4642786[P]. 1987.
[12] Ge X, Lai D, Wu X, et al. A novel non-model-based 6-DOF electromagnetic tracking method using non-iterative algorithm[C].IEEE EMBS, 2009: 5117-5144.
[13] 葛鑫, 邬小玫, 方祖祥, 等. 一种基于双磁棒旋转搜索的电磁跟踪方法及系统: 中国, 201010179332.2[P]. 2010-05-20.
[14] 葛鑫, 邬小玫, 汪源源, 等. 用于微创手术导航的六自由度电磁跟踪方法[J]. 航天医学与医学工程, 2011, 24(3): 197-203.
[15] 丁宁, 王一枫, 邬小玫, 等. 基于DSP的双磁棒旋转搜索电磁定位跟踪系统设计[J].航天医学与医学工程, 2013, 26(5): 375-380.
[16] 沙敏, 王一枫, 丁宁, 等. 基于电控旋转磁场与非迭代几何算法的电磁跟踪方法仿真研究[J]. 航天医学与医学工程, 2016, 29(1):28-33.
猜你喜欢
舰船科学技术(2022年21期)2022-12-12
传感器世界(2022年6期)2022-11-25
北京测绘(2021年7期)2021-07-28
装备制造技术(2020年11期)2021-01-26
房地产导刊(2020年12期)2021-01-14
房地产导刊(2020年12期)2021-01-14
商品与质量(2020年24期)2020-09-10
中国测试(2017年8期)2017-09-11
空间控制技术与应用(2015年6期)2015-06-07
中学生数理化·高二版(2008年6期)2008-11-12
