一种低代价非绑定式活动的识别方法
2018-04-18 06:52孟宪佳纪青然李荔垚刘宝英
西北大学学报(自然科学版) 2018年2期
孟宪佳,纪青然,李荔垚,赵 月,刘宝英,陈 峰
(西北大学 信息科学与技术学院,陕西 西安 710127)
现今社会,养老是受到普遍关注的热点问题,老年人在家庭中无人看护的时间是安全事故的高发期,为了保护老年人,亟需一种有效的日常看护方法。现存的主动式活动识别方法需要使用者佩戴相应设备,不便于老年人的日常生活。被动式的识别技术在儿童保健[1]、智能家居[2]、入侵检测[3]等场景的应用正在高速发展。然而,依赖于摄像头的被动识别方法[4]会造成隐私泄露;利用可见光[5]的方法需要花费大量人力修改硬件;使用声学信号[6]的方法容易受到噪声影响;采用RF(射频)[7-9]、红外设备[10]、雷达[11]等设备的方法成本过高,均不适用于一般家庭环境。为了解决上述问题,本文提出一种使用RFID(射频识别设备)标签进行活动识别的方法,平均每个标签的价格在0.5~1元间,有效降低了成本,提高了部署规模和复用率,并改变了现有的基于RFID标签的活动识别方法仅使用了RSS(接收信号强度)信号或相位信号的模式,提高了活动识别的准确率。
传统的RFID通信机制如图1所示,RFID标签将接收到的信号通过后向散射机制返回给天线,使用商用的RFID阅读器(Impinj R420)可以读出信号的强度值、相位值、标签的阅读速率以及ID号等信息。本文利用接收到的RSS值和相位值进行活动识别。由于环境影响,接收信号包含大量噪声,这会降低活动匹配精度。针对该问题,本文采用史坦无偏似然估计算法[12]动态去除信号中的环境噪声。

图1 RFID系统的通信机制Fig.1 Conceptual diagram of RFID system
由于不同个体完成相同动作的速度不同,同一个体多次完成相同动作的速度也会变化。某一活动以不同的速度进行,会导致RSS值和相位值的变化不同,造成较大匹配误差。为了解决这个问题,本文采用动态时间规整(Dynamic time warping,DTW)算法[13-15]来处理不同速度下的活动识别,再通过建立权重评价体系将RSS值和相位值相结合进行活动识别。
本文在阅览室、休息室和实验室3种不同的环境下进行实验。实验结果表明,不同活动的识别准确率可达93%,相同活动不同速度的识别准确率可达86%。
1 相关研究
现有的活动识别技术主要包括基于专用硬件设备、基于RSS和基于CSI这3大类。
基于专用硬件设备的活动识别方法通常使用摄像机[4]、红外设备[10]、雷达[16-17]或超声波[6,18]等进行活动识别。雷达利用微多普勒信息可以测量人体不同部位的运动速度。例如,WiTrack[4-5]使用专用调频载波信号跟踪人体的活动。WiVi[19]使用逆合成孔径雷达作为天线阵列来追踪人体运动产生的射频波束,从而进行活动识别。然而这些方法有许多限制,如红外设备和雷达设备造价昂贵[20-21],摄像机存在光线约束[22-24]、视距限制问题[18],而且会侵犯个人隐私,超声波技术覆盖范围小,不便于大规模部署,而且更易受周围环境影响,现有的超声波识别技术[6,18]只能识别特定的几种姿势,并需要用户提前做特定的动作才能进行,普适性较差。此外,主动式活动识别方法往往要求目标穿戴额外的设备[24-26],不便于日常普及应用。
基于RSS的活动识别方法[27-29]主要利用由活动引起无线信号的变化进行活动识别。由于RSS信号容易受到环境噪声的影响,基于RSS的活动识别方法只能达到56%~72%精确度,因此单纯利用信号强度随时间的波动难以准确识别具体的活动。例如, Sigg等[30]中提到的方法精确度只有56%,Kodeswaran等[31]使用无线电软件设备来提高RSS的准确度,最终将精确度提高到了72%。
基于CSI的活动识别方法[7-8,25-26,32-34]可以实现较高的准确性,但是需要大量地部署设备。例如,E-eyes[8]为了提高识别精度,在每个房间都部署了一套WiFi设备来识别日常活动。而且为了提高数据读取速率,从而提高识别精度,基于CSI的活动识别方法通常需要借助其他设备,这使得系统成本倍数增加。例如,WiHear[35]需要使用专用的定向天线接收CSI信号变化,来识别唇语。
其他的还有像RFTraffic[33]利用发动机排放的射频噪声来识别车辆运动,从而进行交通疏密管制,RFTraffic[34]可以进一步识别出车辆和人类的区别,并探测出车辆的行驶速度。宋晓天[36]使用环境周围的调频广播信号进行定位与活动识别,其他的还有通过感应移动设备的RSS信号变化情况来判断用户的活动。上述方法通常需要大量的训练来实现,而且对环境要求较高,不能达到细粒度的活动识别。
本文使用RSS和相位来改善仅基于RSS或相位的活动识别方法的不足。相比之下,本文的方法具有较高的准确性和较低的成本,更适用于大规模部署的情况。
2 信号去噪
如图1所示,阅读器通过天线与RFID标签进行通信,其中,阅读器接收到的信号强度值可以表示为
(1)
其中,PTx为信号的传输功率,γt是阅读器的传输损耗,d表示标签到天线的距离,Gr表示天线的增益,Gt表示标签天线的增益,γt为辐射系数。
相位值可以表示为
(2)
其中,θT表示相位偏差,由标签本身引起,D表示信号在空气中的传播距离,γ表示电磁波在空气中传播的波长,θS表示相位偏移,是由阅读器自身电路造成的。
环境中存在多径效应,RFID阅读器本身也会产生相位偏移,这些影响使得接收到的原始信号包含噪声,不能直接使用。本文利用史坦无偏似然估计方法[11,37]对原始信号进行去噪处理。该方法是一种利用二次方程原理的自适应阈值选择去噪方法。其定义为
η=(2logn)1/2ξ。
(3)
其中,ξ是估计的噪声值,通过式(3)可以计算出准确的阈值η。之后,利用式(4)计算η的似然估计值,
L′=minL(η;Y)。
(4)
其中,Y是服从概率分布的测量值,L表示η的似然估计值。最终的阈值T可以通过式(5)得出,
(5)
其中,A是指示函数,Nk是原始函数的第k阶导数。如图2所示,去噪后的信号特征表现的更明显。
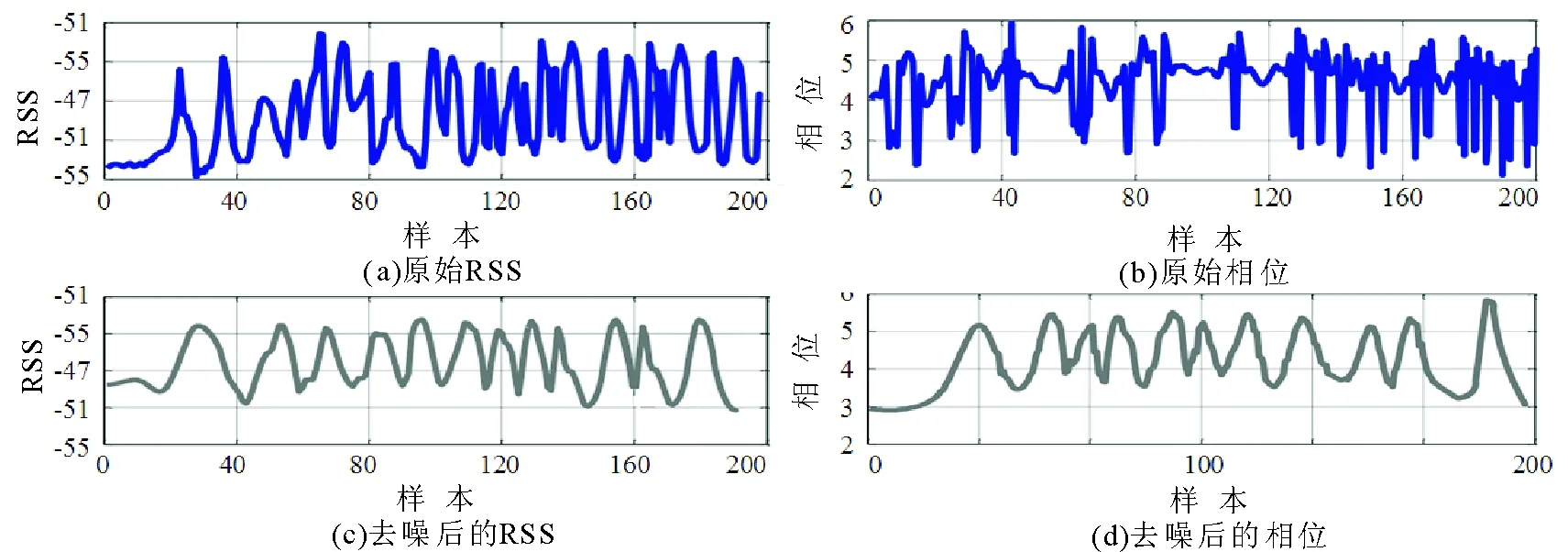
图2 去噪前/后的RSS和相位值Fig.2 RSS and phase measurement before/after denoising
3 特征匹配
目标执行连续动作时,在进行特征匹配前需要先划分不同动作,本文采用动态滑动窗口匹配的方法,划分不同的动作。首先根据数据库中每个动作的数据集大小动态规定每次的匹配窗口和待测数据窗口的大小,二者大小相同,待测窗口从待测数据集的第一个数据开始。设数据库中已知动作的数据集为ges={ges1,ges2,…,gesm},大小为m,则定义匹配窗口和初始待测数据窗口为m,待测数据集大小为n。然后将已知动作的信号特征和待测数据窗口的信号特征进行匹配,匹配结果分为以下3种情况:①匹配成功;②待测数据窗口的信号特征和已知动作的信号特征的一部分匹配成功;③匹配失败。匹配过程具体算法如下:
a) 若ges与rec的信号特征匹配成功,rec={recx,recx+1,……,recx+m}(i≤x≤n-m),ges={ges1,ges2,…,gesm},则数据集rec的识别结果为ges对应的已知动作。
b) 若数据集rec与己知动作的部分ges′匹配成功,ges′={ges1,ges2,…,gesx},(1≤x≤m),rec={recx,recx+1,…,recx+m}(i≤x≤n-m)。
令增加因子γ=m%x,将待测数据窗口大小扩大为m+γ,继续匹配,若匹配成功则不断扩大数据窗口,直至完全匹配成功;若匹配失败则将待测数据窗口恢复初始化状态。
c) 若ges与rec的信号特征匹配失败,则将待测窗口向后滑动λ个数据,继续匹配ges和recλ,ges={ges1,ges2,…,gesm},recλ={recx+λ,recx+λ+1,…,recx+λ+m}。
利用DTW算法,匹配已知动作的数据窗口和待测数据窗口的信号特征。同一个人,做两次相同的动作,由于两次动作的速度或方向有差别,会对信号产生不同的影响,使用DTW算法可以有效地解决这类问题。它可以计算两个不同长度的数据集之间的相似性,同时也可以调节时间上的差异。对于每个活动,分别用对应的RSS值信息和相位值信息进行匹配,得到两个结果。
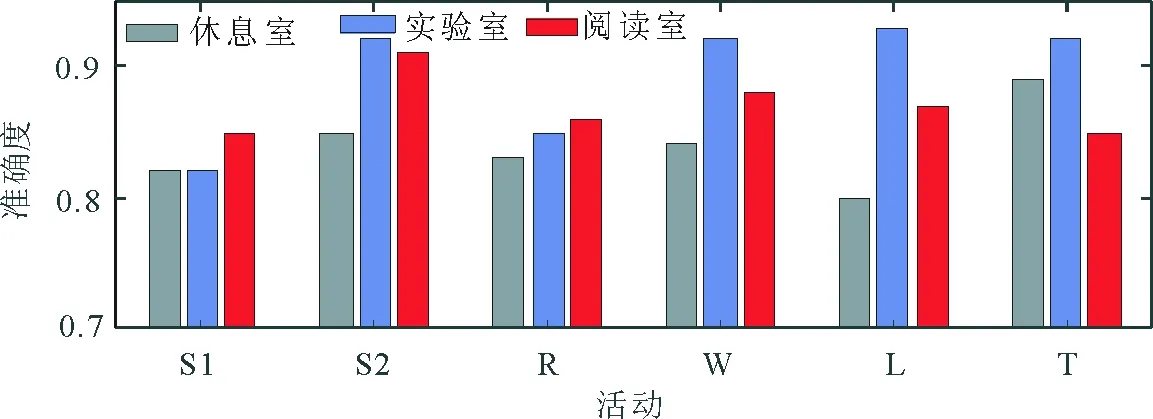
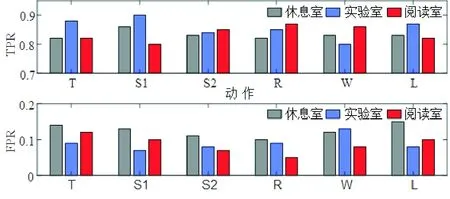
设数据库中的某活动数据集为:ges={ges1,ges2,…,gesm}(1 Ddis(m,n)=(ges-rec)2,1 (6) 将计算得出的欧拉距离投影到坐标系中,形成一个m*n的矩阵,并利用式(7)求出最短总路径: DDS(m,n)=Ddis(m,n)+min{DDS(m-1,n),DDS(m-1,n-1),DDS(m,n-1)}。 (7) 其中,1 熵权法的基本思想是根据指标的变化来确定客观权重。本文采用熵权法建立权重评估系统来综合评估确定最终匹配结果。该方法包括3个主要阶段:①数据标准化;②计算每个指标的信息熵;③确定每个指标的权重。 本文设置了多个指标(Fk)对识别结果进行评估,包括:识别准确率(F1),识别区域大小(F2),原始数据集的大小(F3)。不同指标的维度和大小是不同的,采用式(8)对每个指标进行标准化处理, (8) 信息熵是指信息源的不确定性程度。用Qj代表信息熵,由式(9)计算各项指标的信息熵(Q=(Q1,Q2,…,Qk)): (9) 其中,Pi是信息源中第i个数据的概率。 根据式(10)分别计算RSS和相位的权重, (10) 指标的信息熵越小,该指标提供的信息量越大,在综合评价中所起作用就越大,权重就应该越高。 最后利用式(11)计算最终的识别结果, Ffinal=A×WweightRss+B×WweightPhase。 (11) 其中,WweightRss和WweightPhase是通过式(10)计算得到的RSS和相位的权重。A和B是通过大量前期实验确定的,A近似等于0.72,B的值在0.34和0.41之间。 上述方法只研究了单个标签的情况,部署多个标签会使识别结果更精确。因此,本文采用投票机制,将所有受影响的标签的识别结果进行组合,以获得较高的识别精度。假设每个活动都有M个受影响的标签和N个指纹数据集。我们定义一个长度为N且初始值全0的投票向量V。根据每个受影响标签的识别结果,给相应的Vi(1 (12) 最后,取投票向量V中最大的元素(Vi)对应的活动为最终的识别结果, g=arg maxiVi。 (13) 文中对6种不同活动进行了监测,并通过一系列实验对本文提出方法的准确性和鲁棒性进行了评估。实验中,使用现有的商用RFID设备,其中包括频率为924.375MHz,带宽为231.25kHz的ImpinjR420阅读器,全向天线和RFID标签。同时,设置阅读器工作在“DenseReaderM8”的读取模式。 表2示,将单因素分析中对生存有影响的各个因素进行Cox分析,FIGO分期、是否满意减瘤、病灶累及单双侧卵巢是影响卵巢透明细胞癌预后的独立影响因素。在对生存有影响的各个因素作用下(图1),随着时间的推移,累计生存率下降。 首先,在6m×10m的实验室进行实验。标签阵列放置在距地面高度为1.05m的监测区域。在标签阵列的相对面部署一个天线。每个天线与标签阵列之间的距离约为2.5m,标签之间的距离为0.6m,阅读器部署在距天线0.5m的地方,在上述部署中获取参考指纹。之后,在3个特殊的室内场景中使用完全相同的部署进行验证。 实验场景如图3所示,图3(a)为4m×6m的阅读室,图3(b)为休息室,图3(c)为6m×10m的实验室。 图3 实验场景Fig.3 Deployment in different scenarios 在每个场景中,为了降低错误率,同一种动作让同一个志愿者至少做5次。每个动作的平均测量时间见表1。两个连续的活动之间是有间隔的,利用此间隔将连续的活动分割成多个单一的动作。使用活动的估计持续时间和实际持续时间的公共部分来评估分割的准确性。最后,分析识别的准确性。 表1 活动信息Tab.1 The activity information 如图4所示,3个场景的识别准确度均在80%和93%之间,且在实验室的准确性高于其他场景,这是由于实验室场景的多径效应影响较小。同时,3种场景下摔倒的平均准确率约为89%,轻微摆臂的平均准确率只有83%,而人行走的平均准确率是85%。由此,可以得到以下结果:动作的执行速度越快,分割精度越高。除此之外,其他类型活动的平均准确率较高,证明了活动分割的鲁棒性。 为了评估活动识别的准确性,本文使用了两个指标:一个是真阳性率(TPR),即正确识别某一活动的次数占总实验次数的比率;另一个是假阳性率(FPR),即被错误识别为某一活动的次数占该活动总实验次数的比率。在3种不同情况下使用TPR和FPR评估本文实验的稳定性。结果如图5所示,3种环境下的6种活动的TPR在81%到89%之间,FPR小于15%,这说明,该方法在不同的环境中具有较高的鲁棒性。 本文实验通过分析不同目标、标签数量、活动强度以及天线与标签距离的实验结果,得出如下结论: 1) 不同目标的影响:随机抽取7名身高体重不同的志愿者,测量不同目标对实验结果的影响。让7名志愿者在默认的环境中执行相同的活动。结果如图6(a)所示,TPR平均达到了85%,FPR平均不超过12%。因此,不同目标对活动识别准确率影响不大。 2) 标签数量的影响:在默认环境下进行8组对比实验,标签数分别为2, 4, 6, 8, 11, 13, 16, 20。结果如图6(b)所示,当标签数量增加时,其准确性会先提高,标签数量在6个到8个之间时,准确度最高,之后随着标签数量的增加,精度下降。所以,标签数量对活动识别准确率有较大的影响。 图4 不同环境下的活动识别准确度Fig.4 Separation accuracy under different environment 图5 不同环境下的真阳性率和假阳性率Fig.5 True positive rate and false positive rate under different environment 图6 7个目标、不同标签数目以及不同活动强度对应的真阳性和假阳性Fig.6 TPR and FPR beyond seven volunteers and with different quantity of tags and different strength 图7 天线和标签的不同距离对应的准确性和CDFFig.7 The accuracy and CDF with different distance between antenna and tags 3) 活动强度:为了验证活动强度对活动识别准确性的影响,我们进行了活动强度大小分别为低速、中速、高速的3组实验。结果如图6(c)所示,随着活动强度的增加,TPR逐渐增加,FPR逐渐下降。由此表明,高强度活动可以显著提高活动识别准确率。 本文提出的方法在不同环境中均达到了较高的准确性,但仍有进一步加强的空间,以下阐述相关问题和该方法的局限性; 1) 在实际情况中,如果目标以不同的方向执行相同的活动,如面对标签或者背对标签,是否会对活动识别精度产生影响。针对该问题,我们进行了补充性实验,让同一个志愿者分别在面朝标签0°,45°,90°方向匀速行走,观察接收到的RSS信号与相位信号,我们发现,虽然信号波动的峰值有所变化,但是基本特征依然不变,匹配结果基本没有变化。因此,活动方向不同对识别结果产生的影响较轻,可以忽略。 2) 在多目标场景下,多目标在监测区域内同时进行活动时,存在相互干扰的问题,是否会对活动识别精确度产生影响。针对该问题,我们进行了补充实验,实验结果表明:如果两个目标间隔大于2m,目标之间的相互干扰作用极小;如果两个目标间隔小于2m时,目标之间的相互影响不可以忽略,所以监测系统收到的信号是混杂的,这会导致错误的识别结果,从而降低识别精度。另外,在现有的研究工作中[38],多目标定位依然是一个难点,目前还未找到恰当的方法解决这个问题,这正是本文提出的方法在实际应用中的限制,即只能应用于单一目标的场景。在后续工作中,将尝试采用不同的方法解决多目标活动的相互干扰问题。 3) 目标在进行连续活动时,如何划分不同动作。本文提出的活动识别方法采用动态滑动窗口匹配的方法划分不同的动作。该方法存在一定的不足,如匹配量较大,数据库中的每个动作都需要和待测数据集匹配多次,降低了匹配效率。在后续工作中,我们会不断改进该方法。 本文主要有两个贡献:第一,提出了RSS-相位模型,该模型是一种使用无源RFID设备进行活动识别的方法,它的识别精度与传统的只使用RSS或相位的方法相比有明显的提高。第二,利用DTW算法进行特征匹配,提高了匹配精确度。通过在3个不同实验环境中的测试,平均识别准确率达到87.9%,证明了方法的有效性。 参考文献: [1]CHANDRASHEKHAR M, KUSHBU,KURIAN M. Design and implementation of child activity recognition using accelerometer and rfid cards[J].International Journal of Advanced Research in Computer Engineering & Technology (IJARCET), 2014, 3(4). [2]FORTIN-SIMARD D, JEAN-SEBASTIEN B,BOUCHARD K, et al. Exploiting passive rfid technology for activity recognition in smart homes[J].IEEE Intelligent Systems, 2015, 30(4):7-15. [3]RAHEJA J L, DEORA S, CHAUDHARY A. Cross border intruder detection in hilly terrain in dark environment[J].Optik-International Journal for Light and Electron Optics, 2016, 127(2):535-538. [4]AGGARWAL J K,RYOO M S. Human activity analysis: Areview[J].ACM Computing Surveys (CSUR), 2011, 43(3):16. [5]CHOUDHURY T, CONSOLVO S, HARRISON B, et al. The mobile sensing platform: An embedded activity recognition system[J].IEEE Pervasive Computing, 2008, 7(2). [6]KHARRAT M, RAMASSO E, PLACET V, et al. A signal processing approach for enhanced acoustic emission data analysis in high activity systems:Application to organic matrix composites[J].Mechanical Systems and Signal Processing, 2016, 70 : 1038-1055. [7]WANG W, LIU A X, SHAHZAD M, et al. Understanding and modeling of wifi signal based human activity recognition[C]∥In Proceedings of the 21st Annual International Conference on Mobile Computing and Networking. ACM, 2015:65-76. [8]WANG Y, LIU J, CHEN Y Y, et al. E-eyes: Device-free location-oriented activity identification using fine-grained wifi signatures[C]∥In Proceedings of the 20th Annual International Conference on Mobile Computing and Networking.ACM, 2014:617-628. [9]翟黎. RFID快速隐私保护认证协议[J].软件学报,2015,26(12):3215-3222. [10] SHOAIB M, BOSCH S, INCEL O D, et al. Fusion of smartphone motion sensors for physical activity recognition[J].Sensors, 2014, 14(6) : 10146-10176. [11] Google project soli[EB/OL].[2017-10-05].https://www.youtube.com/watch?v=0QNiZfSsPc0. [12] CANDES E J, SING-LONG C A, TRZASKO J D. Unbiased risk estimates for singular value thresholding and spectral estimators[J].IEEE Transactions on Signal Processing, 2013, 61(19) : 4643-4657. [13] WANG J, KATABI D. Dude, where's my card?: Rfid positioning that works with multipath and non-line of sight[J].ACM SIGCOMM Computer Communication Review, 2013, 43(4):51-62. [14] SALVADOR S, CHAN P. Toward accurate dynamic time warping in linear time and space[J].Intelligent Data Analysis, 2007, 11(5) : 561-580. [15] 杨艳林,叶枫,吕鑫,等. 一种基于DTW聚类的水文时间序列相似性挖掘方法[J].计算机科学,2016,43(2):245-249. [16] KHAN M A H, KUKKAPALLI R, WARADPANDE P, et al. RAM: Radar-based activity monitor[C]∥IEEE INFOCOM 2016-The 35th Annual IEEE International Conference on Computer Communications. IEEE, 2016 : 1-9. [17] CHENG J Y, AMFT O, LUKOWICZ P. Action capacitive sensing: Exploring a new wearable sensing modality for activity recognition[C]∥International Conference on Pervasive Computing.Springer, 2010 : 319-336. [18] YATANI K,TRUONGK N.Bodyscope: A wearable acoustic sensor for activity recognition[C]∥Proceedings of the 2012 ACM Conference on Ubiquitous Computing, 2012:341-350. [19] ADID F, KATABI D. See through walls with WiFi![C]∥ACM SIGCOMM 2013 Conference on SIGCOMM.ACM, 2013:75-86. [20] CHANG H L, TIAN J B, LAI T T, et al. Spinning beacons for Precise indoor localization[C]∥Proceedings of the 6th ACM Conference on Embedded Network Sensor Systems.ACM, 2008:127-140. [21] SMISEK J, JANCOSEK M, PAJDLA T. 3D with Kinect[M]∥Consmer Depth Cameras for Computer Vision.London:Springer,2013:3-25. [22] LEI J N, REN X F, FOX D. Fine-grained kitchen activity recognition using rgb-d[C]∥Proceedings of the 2012 ACM Conference on Ubiquitous Computing.ACM,2012:208-211. [23] LI L Q, HU P, PENG C Y,et al. Epsilon: A visible light based positioning system[C]∥National Spatial Data Infrastructure.USENIX,2014:331-343. [24] PU Q F,GUPTA S, GOLLAKOTA S, et al. Whole-home gesture recognition using wireless signals[C]∥Proceedings of the 19th Annual International Conference on Mobile Computing & Networking. ACM, 2013:27-38. [25] WANG G H, ZOU Y P, ZHOU Z M, et al. We can hear you with wi-fi![J].IEEE Transactions on Mobile Computing, 2016, 15(11) :2907-2920. [26] ABDELNASSER H, YOUSSEF M, HARRAS K A.Wigest: A ubiquitous wifi-basedgesture recognition system[C]∥2015 IEEE International Conference on Computer Communications (INFOCOM).IEEE,2015:1472-1480. [27] YANG S W, DESSAI P, VERMA M, et al.Freeloc:Calibration-free crowdsourced indoor localization[C]∥2013 IEEE International Conference on Computer Communications.IEEE,2013:2481-2489. [28] SIGG S, SCHOLZ M, SHI S Y, et al. Rf-sensing ofactivities from non-cooperative subjects indevice-free recognition systems using ambient and local signals[J].IEEE Transactions on Mobile Computing, 2014, 13(4):907-920. [29] SIGG S, BLANKE U, TROSTER G. The telepathic phone: Frictionless activity recognition from WiFi-RSSI[C]∥IEEE International Conference on Pervasive Computing and Communications.IEEE, 2014:148-155. [30] SIGG S, SCHOLZ M, SHI S, et al. RF-sensing of activities from non-cooperative subjects in device-free recognition systems using ambient and local signals[J].IEEE Transactions on Mobile Computing,2014,13(4):907-920. [31] KODESWARAN P, KOKKU R, MALLICK M,et al.Demultiplexing activities of daily livingin iot enabled smarthomes[C]∥IEEE INFOCOM 2016-The 35th Annual IEEE International Conference on Computer Communications.IEEE,2016 : 1-9. [32] ALI K, LIU A X, WANG W, et al.Keystroke recognition usingwifi signals[C]∥Proceedings of the 21st Annual International Conference on Mobile Computing and Networking.ACM, 2015 : 90-102. [33] SHI S, SIGG S, JI Y. Joint localization and activity recognition from ambient FM broadcast signals[C]∥Conference on Pervasive & Ubiquitous Computing Adjunct Publication. ACM,2013:521-530. [34] DING Y, BANITALEBI B, MIYAKI T, et al. RFTraffic: Passive traffic awareness based on emitted RF noise from the vehicles[C]∥International Conference on ITS Telecommunications. IEEE, 2011:393-398. [35] AL-HUSSEINY A, YOUSSEf M. RF-based traffic detection and identification[C]∥Vehicular Technology Conference. IEEE, 2012:1-5. [36] KASSEM N, KOSBA A E, YOUSSEF M. RF-Based Vehicle Detection and Speed Estimation[C]∥Vehicular Technology Conference(VTC Fall). IEEE, 2012:1-5. [37] 宋晓天. 高敏感度无源RFID传感标签的设计研究[D].合肥:中国科学技术大学,2017. [38] 程光, 罗予频, 王宏宝. 联合轮廓法在低分辨率视频下的多目标追踪[J].计算机工程与应用, 2007, 43(2):64-66.4 活动识别
5 实验结果与分析




6 存在问题讨论
7 结 语
猜你喜欢
健康之家(2021年19期)2021-05-23医学食疗与健康(2021年27期)2021-05-13农业科技与信息(2021年2期)2021-03-27车迷(2018年11期)2018-08-30中国交通信息化(2018年5期)2018-08-21天津教育·下(2018年9期)2018-07-13海峡姐妹(2018年3期)2018-05-09运动(2016年7期)2016-12-01Coco薇(2015年11期)2015-11-09少儿科学周刊·少年版(2015年2期)2015-07-07