基于注入截面法的颗粒饲料离散元模型参数标定
2018-04-19 00:37王红英刘玉德
农业机械学报 2018年4期
彭 飞 王红英 方 芳 刘玉德
(1.北京工商大学材料与机械工程学院, 北京 100048; 2.中国农业大学工学院, 北京 100083;3.郑州大学化工与能源学院, 郑州 450001)
0 引言
离散元法(Discrete element method,DEM)是由美国CUNDALL教授在1971年基于分子动力学原理提出的一种颗粒离散体物料分析方法,在农产品及农业装备研究中应用广泛[1-3]。全面系统地建立颗粒饲料离散元仿真参数,有助于离散元法在颗料饲料后喷涂、冷却、输送、仓储、饲喂等关键环节及相关设备研发与改进中应用。
基于离散元法构建颗粒饲料模型,需要定义其物性参数,主要包括颗粒本征参数(密度、弹性模量、泊松比等)以及颗粒与颗粒间、颗粒与作用材料间的接触参数(滑动摩擦因数、碰撞恢复系数、滚动摩擦因数等)[4-5]。国内外关于颗粒饲料离散元模型构建方面的研究和报道较少,由于颗粒模型与真实颗粒的差异性、颗粒间接触特性的复杂性,需要建立颗粒饲料模型,并对其相关的离散元参数进行标定。
颗粒休止角也称堆积角,是表征颗粒物料流动、摩擦等特性的宏观参数,能够反映散体颗粒群综合作用的宏观特征[6],有助于认识堆积的微观力学机理和评估所用模型的适应性[7]。因此,国内外学者大都基于休止角堆积试验进行颗粒物料的离散元参数标定[8-11]。贾富国等[12]模拟无底圆筒内稻谷颗粒的堆积过程,并结合图像处理技术对堆积图进行图像轮廓处理,进而获取其堆积休止角数值;韩燕龙等[13]构建了粳稻脱壳后产物的离散元模型,采用Matlab图像处理技术获取颗粒堆单侧图像边界轮廓线,并对选取边界拟合得到其堆积休止角。为获取物料堆积的休止角数值,尚需要对堆积情况进行边界分析、图像处理等后续操作,且存在物料用量较多、休止角数值读取不直观等情况。
本文提出一种基于注入截面法的离散元模型参数标定方法,通过颗粒堆积的截面轮廓线直接获取休止角,标定颗粒接触参数。以颗粒饲料为例,构建其离散元模型和基于注入截面法的休止角测定装置几何模型,通过3因素5水平正交回归模拟试验,优化颗粒饲料的离散元模型参数,为标定散粒体物料离散元参数提供一种新方法。
1 材料与方法
1.1 颗粒饲料离散元模型构建
本试验所用颗粒饲料为饲料厂正常生产的大猪料,取自北京市密云区昕三丰饲料厂。饲料原料经粉碎、混合、调质,在制粒机压模的模孔内挤压成型,由切刀切成单个颗粒。其形状(图1a)近似圆柱体,长短不一,利用数显游标卡尺(精度为0.01 mm,张家口市锦丰五金工具制造有限公司)对随机选取的50粒进行直径、长度测量,如图1b所示,最后得到其平均直径为6.4 mm,平均长度为5.2 mm。
基于测得的尺寸,利用基本球单元组合的方法[14-16],在EDEM 2.6软件中组建颗粒饲料离散元模型。由于颗粒饲料为非球体,本文使用模板(Template)辅助完成模型的创建。首先在Pro/E中创建圆柱体三维模型(直径为6.4 mm,长度为5.2 mm),以STL格式导出;接着导入到EDEM中,如图2a所示,确认x、y、z轴分别与模型尺寸方向匹配,便于后续生成圆柱体填充模型。采用27球填充(每层由呈环形对称分布的8球和1个中心球组成,共3层),如图2b所示,其轴向视图和径向视图分别如图2c和图2d所示,可以看出采用多球组合后的颗粒与真实物料外形基本接近。
1.2 接触模型的选取
依据仿真对象的不同,选择相应的接触模型。常用的接触模型有Hertz-Mindlin、Hertz-Mindlin with JKR、Hertz-Mindlin with RVD Rolling Friction、Hertz-Mindlin with Bonding、Linear Cohesion等[17],不同模型适用范围各有差异。考虑到颗粒饲料形状较为规则、含水率较低、颗粒间无粘附力的特点,本文采用Hertz-Mindlin接触模型作为颗粒与颗粒之间及颗粒与接触材料间的接触模型,如图3所示。分析该模型下颗粒饲料受力情况,根据力的合成及颗粒接触碰撞中能量的损耗,模型中将每个颗粒的碰撞接触力及阻尼都分解为法向和切向方向[18]。该接触模型通过迭代耦合计算与分析,可得到颗粒群在仿真时间内的位置等信息。
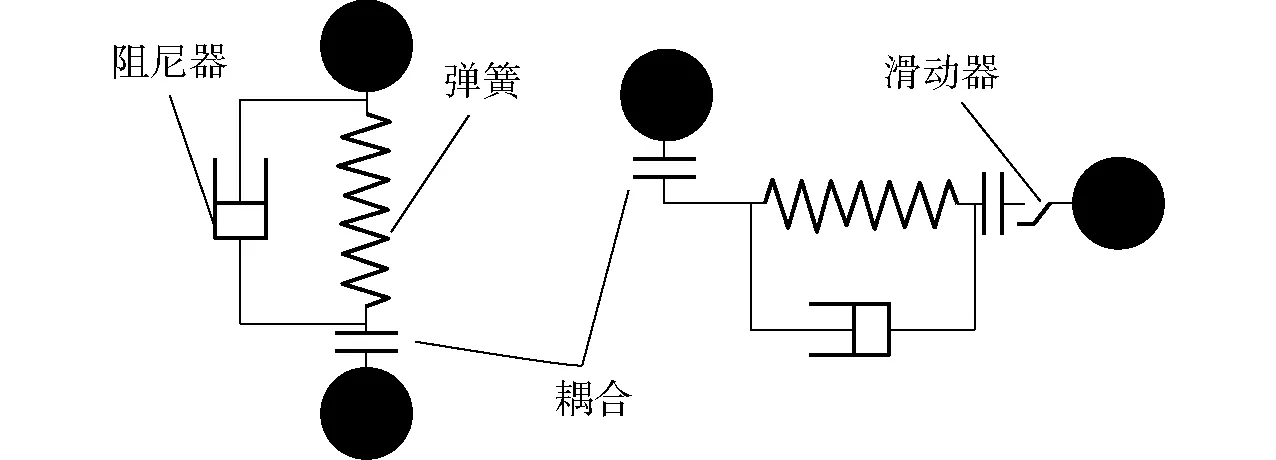
图3 Hertz-Mindlin接触模型Fig.3 Contact model of Hertz-Mindlin
该接触模型中法向接触力为
(1)
其中
式中Fn——法向接触力,N
E0——等效弹性模量
R1、R2——接触球体半径,m
R0——等效接触半径,m
α——法向重叠量,m
G1、G2——2个颗粒的弹性模量
v1、v2——2个颗粒的泊松比
切向接触力为
Ft=-Stδ
(2)
式中St——切向刚度,N/m
δ——切向重叠量,m
法向阻尼力和切向阻尼力分别为
(3)
(4)
其中
式中ε——恢复系数
m1、m2——接触球体质量,kg
Sn——法向刚度,N/m
m0——等效质量,kg
模型中切向力与摩擦力μsFn有关,μs为静摩擦因数,滚动摩擦可以通过接触表面的力矩来表示[19],即
Ti=-μrFnRii
(5)
式中μr——滚动摩擦因数
Ri——质心到接触点的距离,mm
1.3 基于注入截面法的休止角测定装置及模型构建
利用自主研发的基于注入法原理的休止角测定装置进行测量:将散粒体物料经漏斗缓慢添加至空间狭长的长方体容器内形成截面接近三角形的堆积体,待堆积体形状稳定后停止添加;然后以截面的轮廓线为参照作直线与轮廓线重合,此直线与水平线的夹角即为物料的休止角。设计并制作该休止角测定装置,简图如图4所示[20-21],其有效容积空间尺寸为400 mm(长)×40 mm(宽)×200 mm(高),用以实际试验中对颗粒饲料休止角进行测定。该装置主要结构部分的材料选用木材,观察与测定部分选用透明有机玻璃板,整体结构精巧、轻便易携,同时加工和制造较为方便。

图4 休止角测定装置原理图Fig.4 Principle diagram of measuring device for repose angle1.底梁 2.侧梁 3.前有机玻璃 4.后有机玻璃 5.上梁 6.调节螺栓 7.漏斗
1.3.1装置特点
该休止角测定装置与方法的特点:
(1)使用与测定方便。物料在一个狭长的封闭空间内堆积成形,物料斜面紧靠透明有机玻璃板,操作人员在透明板上绘制颗粒堆轮廓线,测量绘制线与水平线的夹角,即可读取休止角。
(2)便于重复测量。透明板上水笔的痕迹可以被轻松擦去,方便进行下一次的测量。
(3)节省物料。相比传统的堆积法,狭长空间堆积所用物料明显要比圆锥体物料节省很多,当样品物料有限时本装置优越性更加突出。在达到相同堆积高度h时,传统装置形成的圆锥体(图5a)体积为
(6)
本装置形成的圆锥截面体(图5b)体积为
(7)
2种方式堆积颗粒体积比为
(8)
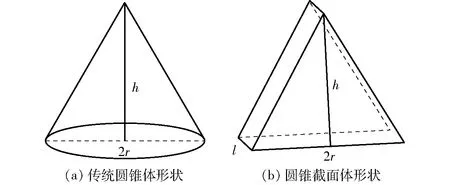
图5 2种方式堆积形状示意图Fig.5 Diagrams of two kinds of accumulation models
以设计的休止角测定装置为例(l=40 mm),假设形成的圆锥底部半径r=150 mm,计算可得2种方式堆积体积比θ=25.5%,即本文中注入截面法所需物料体积仅为传统方法形成的圆锥体积的25.5%。结果表明,注入截面法堆积形成的狭长空间所需物料明显比圆锥体所需物料少很多,尤其在样品物料有限时本装置及方法优越性更加突出。此外,基于本文装置构建的仿真模型,可以显著减少计算模拟量,缩短仿真时间,从而提高仿真效率。
1.3.2模型构建
在Pro/E软件中建立该装置的几何模型,然后保存为igs格式并导入到EDEM软件中;为减少模拟计算量,对模型进行简化处理,模型主要由漏斗和容器空间组成,如图6所示。该几何模型作业空间尺寸与真实试验(长400 mm、宽40 mm、高200 mm)相同,颗粒在漏斗形颗粒工厂内生成并自由下落至狭长的长方体容器内,形成截面接近三角形的锥形颗粒堆,直至在容器底部形成的堆积体形状稳定。模型构建及颗粒饲料休止角测定过程如图7所示。
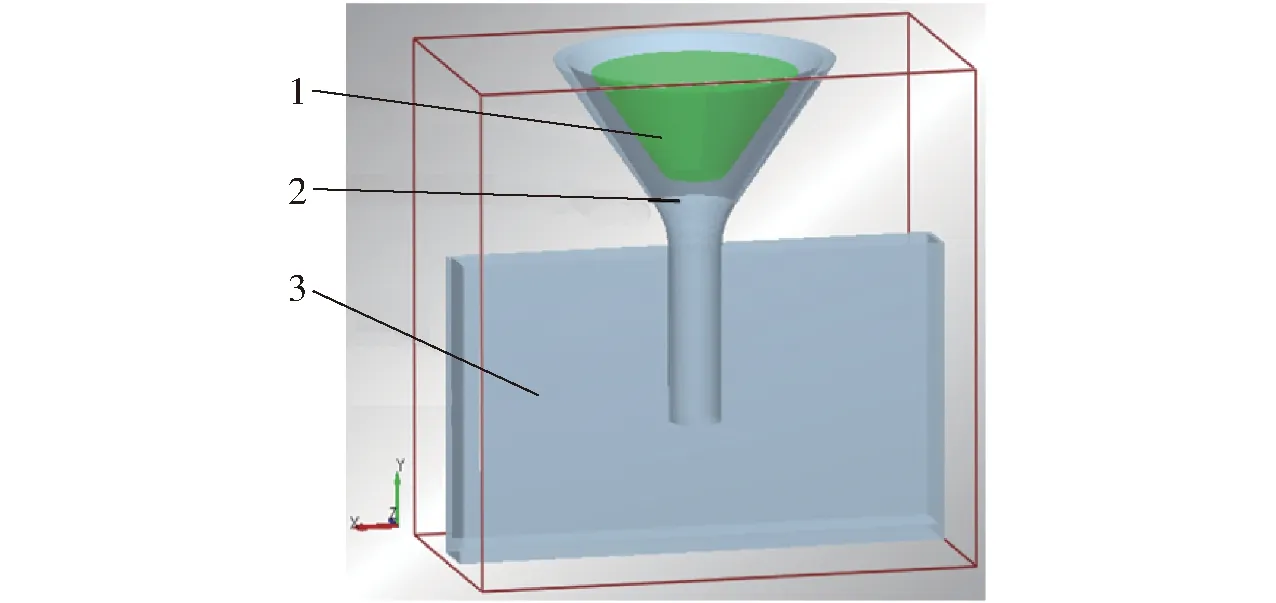
图6 休止角虚拟试验几何模型Fig.6 Geometric model of virtual test for angle of repose1.颗粒工厂 2.锥形漏斗 3.长方体容器

图7 颗粒饲料堆积模拟过程Fig.7 Accumulation simulation of pellet feed
2 试验设计与指标测定
2.1 仿真参数
英国DEM Solution公司推出颗粒材料离散元数据库(Generic EDEM material model database,GEMM),包含了矿石、土壤等数千种典型颗粒的物性参数。基于该数据库,输入仿真规模、材料堆积密度和堆积角,可得到滑动摩擦因数、碰撞恢复系数、滚动摩擦因数的参考值范围[22]。仿真所选其他物理参数尽量接近实际情况,部分参数参照文献[23-26],得到离散元接触参数参考范围:滑动摩擦因数0.16~0.80;碰撞恢复系数为0.10~0.90;滚动摩擦因数0.04~0.28。各仿真参数如表1所示。
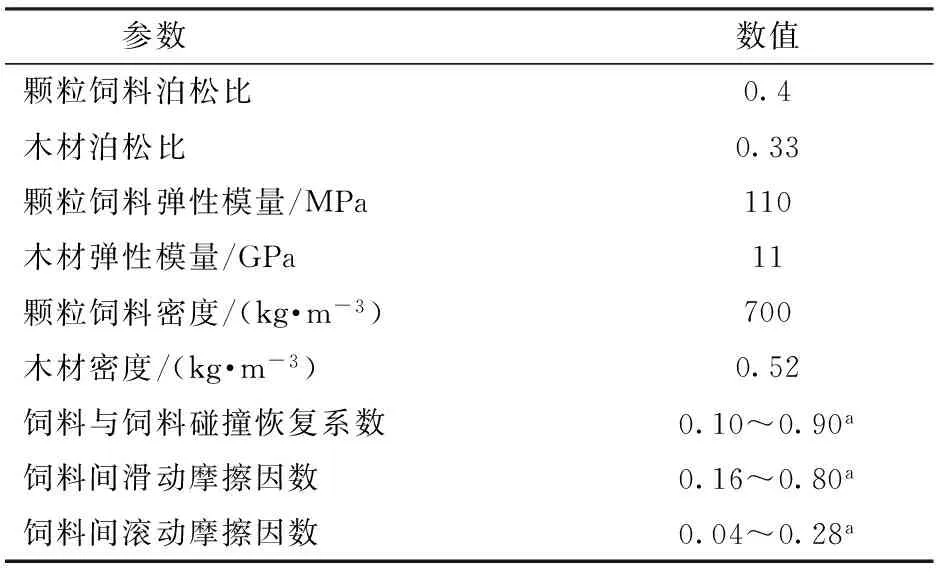
表1 仿真物料和仿真装置主要物理参数Tab.1 Physical properties of materials and device in DEM model
注:a表示该参数为试验变量。
结合表1中离散元参数数值及范围,利用Design-Expert 8.0.6软件,基于正交旋转组合试验原理,以滑动摩擦因数、碰撞恢复系数、滚动摩擦因数为试验变量,建立因素编码如表2所示(x1~x3为各变量真实值)。构建自主设计的注入截面原理的休止角虚拟试验模型,选用堆积稳定后的颗粒休止角Y1为评价指标。
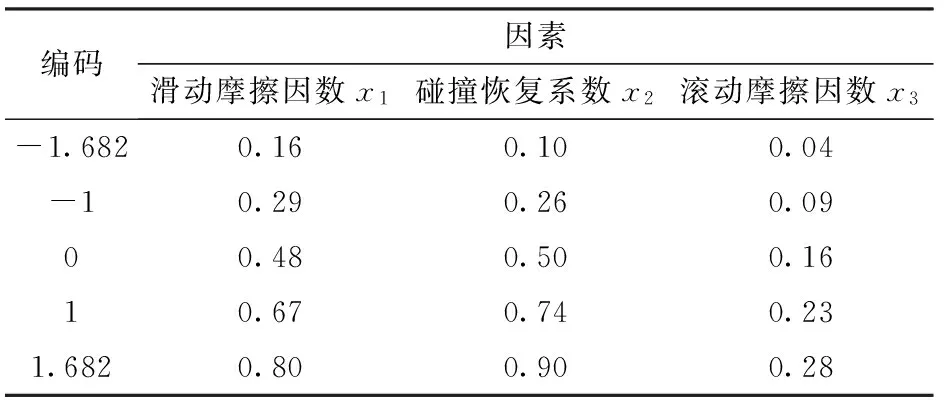
表2 二次回归正交试验设计因素编码Tab.2 Factors and levels of quadratic regression orthogonal rotating experiment design
2.2 休止角的测定
2.2.1仿真
在虚拟模拟仿真中,待模拟试验堆积体形状稳定后,利用EDEM软件内的后处理界面应用Tools选项下的Protractor功能分析颗粒饲料堆积图像,依据其堆积情况测得休止角数值。模拟结果如图8所示。

图8 颗粒饲料单侧堆积模拟图 Fig.8 Unilateral accumulation simulation image of pellet feed

图9 试验照片Fig.9 Experiment picture
2.2.2试验
在真实试验中,待颗粒饲料堆积体形状稳定后,形成截面接近三角形的堆积体。在透明玻璃板上作与截面轮廓线重合的直线,该直线与水平线的夹角即为颗粒饲料的堆积休止角,如图9所示。测定大猪料的休止角,试验重复5次,得到其休止角均值为28.55°,标准差为0.37°,即休止角实测值为28.55°±0.37°。
3 试验结果与分析
3.1 回归模型建立
以各影响因素水平编码值为自变量,以仿真结果测得的休止角Y1为评价指标,构建不同试验组的几何体模型导入到EDEM中进行仿真试验,结果如表3所示,X1、X2、X3为各变量编码值。
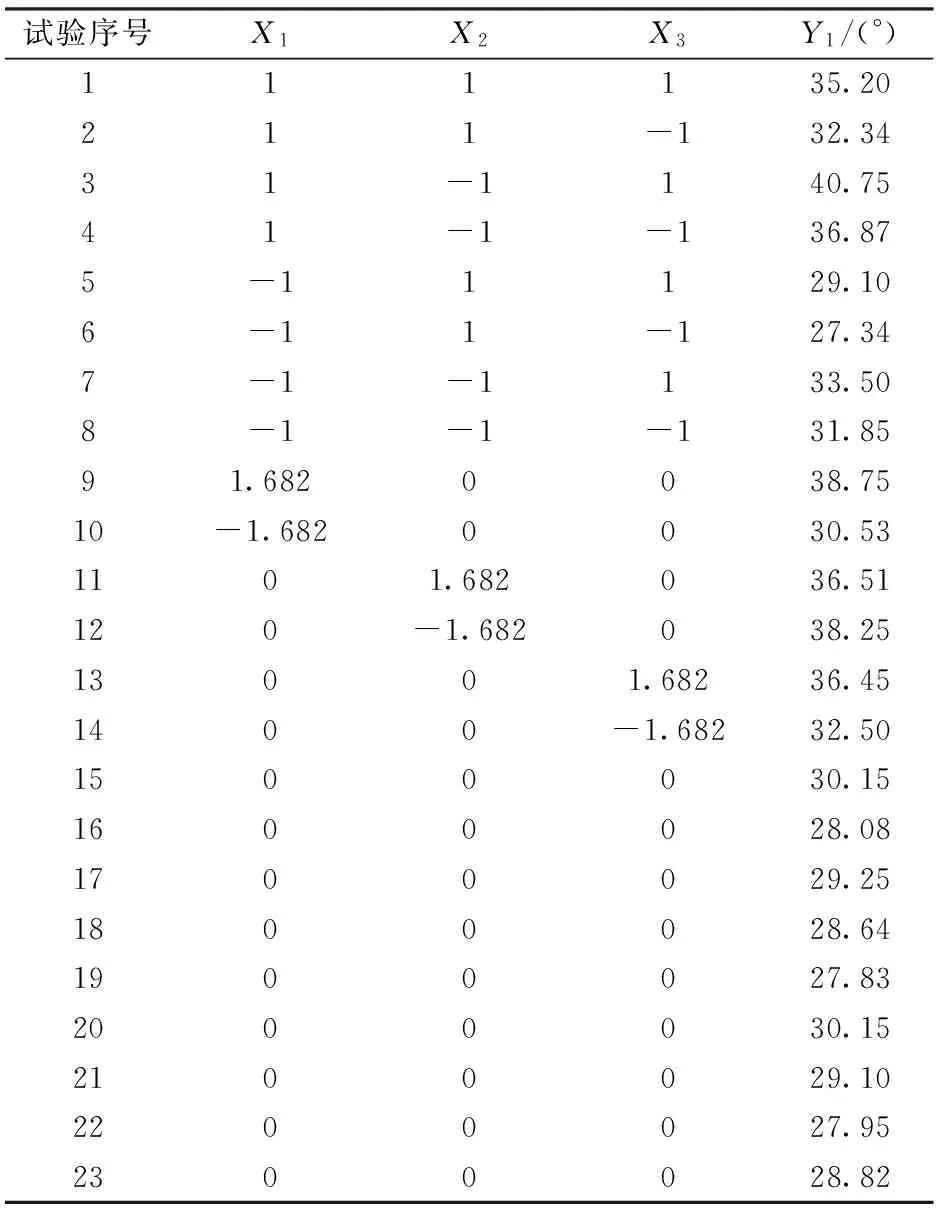
表3 二次回归正交旋转组合设计及试验结果Tab.3 Experimental levels and results of quadratic regression orthogonal rotating test
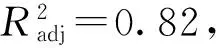
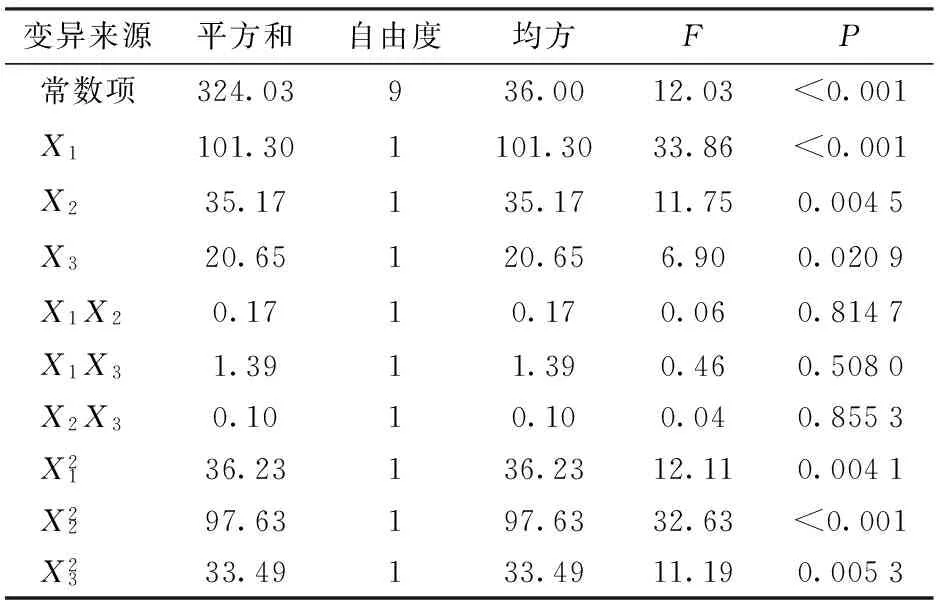
表4 休止角回归方程系数显著性检验结果Tab.4 Significance test results for regression coefficient of angle of repose
采用Design-Expert软件对试验进行回归分析,得到滑动摩擦因数X1、碰撞恢复系数X2、滚动摩擦因数X3与颗粒饲料休止角Y1的回归方程

(9)
3.2 回归模型的寻优
由Design-Expert软件绘制响应面图,分析各因素对休止角的影响,通过依次固定3个因素中的1个因素为零水平,考察其他2个因素对颗粒饲料休止角的影响规律,结果如图10所示。
由图10a和图10b可以看出,随着颗粒间滑动摩擦因数的增大,颗粒饲料休止角呈现增大趋势,这可能是因为,滑动摩擦因数越大,颗粒与颗粒间接触部分的滑动摩擦阻力越大,颗粒越不易滑动散落,形成的堆积体越趋向稳定,因此休止角随滑动摩擦因数的增大而增大。由图10a和图10c可知,随着颗粒间碰撞恢复系数系数增大,颗粒饲料休止角呈现减小趋势。碰撞恢复系数是指物体碰撞分开后,分开的相对速度与碰撞前相对速度的比值,碰撞系数越小,表明颗粒饲料碰撞分开后的相对速度较小,越不易被弹开向四周散落,颗粒堆积休止角稳定性越好,因此堆积形成的休止角越大。武涛等[27]通过对不同碰撞恢复系数下黏性土壤堆积休止角进行研究,有相似的结论和规律。由图10b和图10c分别可以看出,随着滚动摩擦因数增大,颗粒饲料休止角呈现增大趋势。这可能是因为,当滚动摩擦因数较小时,堆积过程中边界颗粒会受到中心颗粒排挤作用,边界扩散更明显[13];滚动摩擦因数较大情况下,不利于边界颗粒的扩散,颗粒会在颗粒堆的高度方向(即Z轴方向)堆积,这是休止角随滚动摩擦因数增大而增大的微观解释。
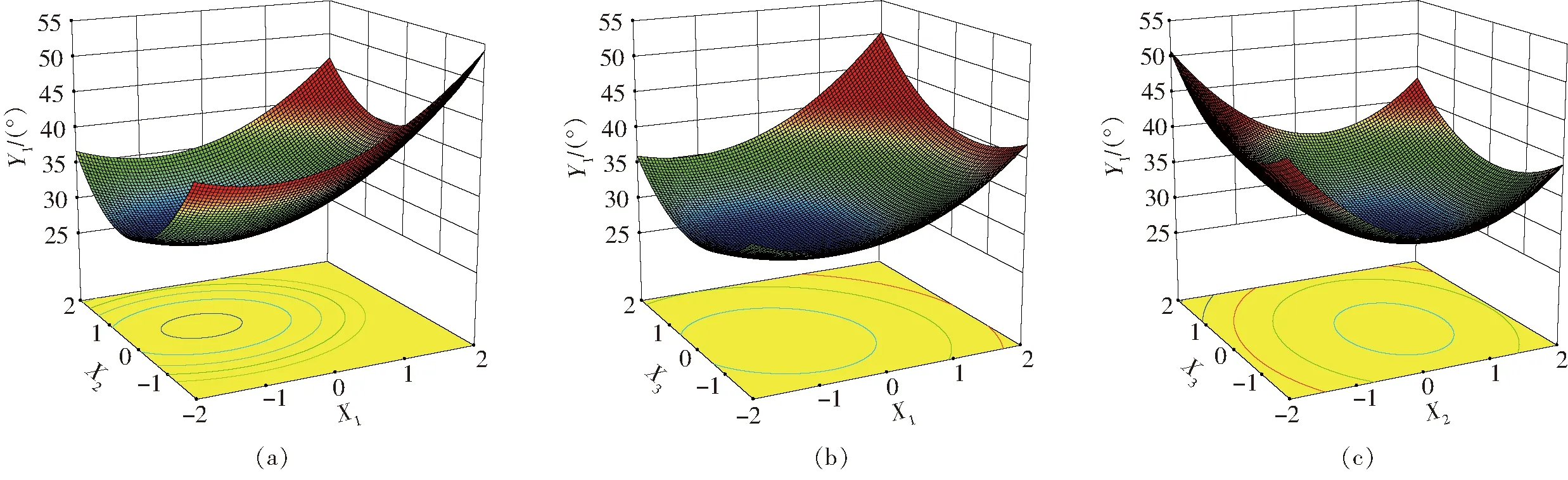
图10 基于响应面法的参数组寻优Fig.10 Optimization of parameter group by using response surface method
3.3 最优参数组合的确定及验证
将实际试验的目标参数休止角Y1=28.55°代入到Design-Expert 8.0.6软件,由响应面法在-1.682≤Xi≤1.682(i=1,2,3)范围内对各参数进行进一步寻优,最终得到休止角最优标定参数组合为:X1=-0.38、X2=0.11、X3=-1.09,即x1=0.41、x2=0.53、x3=0.08,此时颗粒饲料休止角Y1可获得最优目标值。对比颗粒饲料真实个体与颗粒饲料仿真模型,由于仿真中颗粒饲料模型由多球组合而成,模型外表面存在一定的曲面和凹凸,其表面面积与实际颗粒饲料相比较大,同时由于表面凹凸的存在一定程度上阻碍了颗粒的滚动,当颗粒饲料堆积时,颗粒间摩擦阻力增大,颗粒流动性变差。因此,为满足堆积休止角仿真结果与实际结果较高的吻合度,模型中颗粒间滑动摩擦因数和滚动摩擦因数的离散元标定值相对于实际情况有所减小。在离散元模拟试验标定时,基于颗粒饲料、颗粒饲料模型及其物性参数的内在关系和等效原则,使得休止角仿真结果与真实试验基本相同。
为验证最优参数组合的准确性,采用上述参数值进行仿真试验,模拟颗粒饲料堆积情况。5次重复模拟试验,得到颗粒饲料休止角分别为30.55°、28.87°、29.68°、28.95°、29.10°。其均值为29.43°,标准差为0.70°,即颗粒饲料休止角的预测值θ1为29.43°±0.70°。对比上述休止角实测值θ2为28.55°±0.37°。休止角预测值误差δ1计算公式为
(10)
代入颗粒饲料休止角预测值与实测值,可求得其休止角模拟值误差为3.1%,表明经过模型参数标定与优化,颗粒饲料离散元模型较为准确。由上分析可知,基于注入截面法的休止角测定装置及方法可用于颗粒饲料休止角的实际试验与预测模拟。
4 结论
(1)提出了一种基于注入法原理的休止角测定装置及方法,通过物料在一个狭长的封闭空间堆积成形,物料斜面线紧靠透明板,来读取休止角。相对于常规测定装置及方法,其具有测定方便、节省物料、便于重复等优点。该装置及使用方法可以用于散粒体物料休止角的实际试验测定,基于该装置的几何结构可以用于堆积休止角模拟过程中的模型构建。
(2)以大猪料为例,基于颗粒聚合理论在EDEM软件构建了颗粒饲料的三维离散元模型。通过3因素5水平正交组合试验,得出各因素对其休止角的影响显著性顺序依次为:滑动摩擦因数、碰撞恢复系数、滚动摩擦因数。通过Design-Expert软件对试验结果进行回归分析和响应面分析,得到优化后的颗粒饲料离散元标定参数组合:颗粒间滑动摩擦因数为0.41,碰撞恢复系数为0.53,滚动摩擦因数为0.08。通过对比实测值和预测值,验证了仿真试验与回归模型的有效性,为标定散粒体物料离散元仿真参数提供了一种途径。
1LENAERTS B, AERTSEN T, TIJSKENS E, et al. Simulation of grain-straw separation by discrete element modeling with bendable straw particles[J]. Computers and Electronics in Agriculture, 2014, 101: 24-33.
2刘月琴, 赵满全, 刘飞, 等. 基于离散元的气吸式排种器工作参数仿真优化[J/OL]. 农业机械学报, 2016, 47(7): 65-72.http:∥www.j-csam.org/jcsam/ch/reader/view_abstract.aspx?flag=1&file_no=20160710&journal_id=jcsam. DOI:10.6041/j.issn.1000-1298.2016.07.010.
LIU Yueqin, ZHAO Manquan, LIU Fei, et al. Simulation and optimization of working parameters of air suction metering device based on discrete element[J/OL].Transactions of the Chinese Society for Agricultural Machinery, 2016, 47(7): 65-72. (in Chinese)
3王瑞芳, 李占勇, 窦如彪, 等. 水平转筒内大豆颗粒随机运动与混合特性模拟[J/OL]. 农业机械学报, 2013, 44(6): 93-99.http:∥www.j-csam.org/jcsam/ch/reader/view_abstract.aspx?flag=1&file_no=20130618&journal_id=jcsam. DOI:10.6041/j.issn.1000-1298.2013.06.018.
WANG Ruifang, LI Zhanyong, DOU Rubiao, et al. Simulation on random motion and mixing characteristic for soybean in rotary drum[J/OL]. Transactions of the Chinese Society for Agricultural Machinery, 2013, 44(6): 93-99. (in Chinese)
4KRUGGEL-EMDEN H, SIMSEK E, RICKELT S, et al. Review and extension of normal force models for the discrete element method[J]. Powder Technology, 2007, 171(3): 157-173.
5CLEARY P W. Industrial particle flow modeling using discrete element method[J]. Engineering Computations, 2009, 26(6): 698-743.
6吴爱祥, 孙业志, 刘湘平, 等. 散体动力学理论及其应用[M]. 北京:冶金工业出版社, 2002.
7李艳洁, 徐泳. 用离散元模拟颗粒堆积问题[J]. 农机化研究, 2005,27(2): 57-59.
LI Yanjie, XU Yong. Discreteelement simulation on particle piling[J].Journal of Agricultural Mechanization Research, 2005, 27(2): 57-59. (in Chinese)
8刘凡一, 张舰, 李博, 等. 基于堆积试验的小麦离散元参数分析及标定[J]. 农业工程学报, 2016, 32(12): 247-253.
LIU Fanyi, ZHANG Jian, LI Bo, et al. Calibration of parameters of wheat required in discrete element method simulation based on repose angle of particle heap[J]. Transactions of the CSAE, 2016, 32(12): 247-253. (in Chinese)
9GELDART D, ABDULLAH E C, HASSANPOUR A, et al. Characterization of powder flowability using measurement of angle of repose[J]. China Particuology, 2006, 4(3-4): 104-107.
10李婉宜, 曾攀, 雷丽萍, 等. 离散颗粒流动堆积行为离散元模拟及实验研究[J]. 力学与实践, 2012, 34(1): 20-26.
LI Wanyi, ZENG Pan, LEI Liping, et al. Simulation based on discrete element method and experiment on flow and packing behavior of particles[J]. Mechanics in Engineering, 2012, 34(1): 20-26. (in Chinese)
11张锐, 韩佃雷, 吉巧丽, 等. 离散元模拟中沙土参数标定方法研究[J/OL]. 农业机械学报, 2017, 48(3): 49-56.http:∥www.j-csam.org/jcsam/ch/reader/view_abstract.aspx?flag=1&file_no=20170306&journal_id=jcsam. DOI:10.6041/j.issn.1000-1298.2017.03.006.
ZHANG Rui, HAN Dianlei, JI Qiaoli, et al. Calibration methods of sandy soil parameters in simulation of discrete element method[J/OL]. Transactions of the Chinese Society for Agricultural Machinery, 2017, 48(3): 49-56. (in Chinese)
12贾富国, 韩燕龙, 刘扬, 等. 稻谷颗粒物料堆积角模拟预测方法[J]. 农业工程学报, 2014, 30(11): 254-260.
JIA Fuguo, HAN Yanlong, LIU Yang, et al. Simulation prediction method of repose angle for rice particle materials[J]. Transactions of the CSAE, 2014, 30(11): 254-260. (in Chinese)
13韩燕龙, 贾富国, 唐玉荣, 等. 颗粒滚动摩擦系数对堆积特性的影响[J]. 物理学报, 2014, 63(17): 174501.
HAN Yanlong, JIA Fuguo, TANG Yurong, et al. Influence of granular coefficient of rolling friction on accumulation characteristics[J]. Acta Physica Sinica, 2014, 63(17): 174501. (in Chinese)
14刘彩玲, 王亚丽, 宋建农, 等. 基于三维激光扫描的水稻种子离散元建模及试验[J]. 农业工程学报, 2016, 32(15): 294-300.
LIU Cailing, WANG Yali, SONG Jiannong,et al. Experiment and discrete element model of rice seed based on 3D laser scanning[J]. Transactions of the CSAE, 2016, 32(15): 294-300. (in Chinese)
15于亚军, 周海玲, 付宏, 等. 基于颗粒聚合体的玉米果穗建模方法[J]. 农业工程学报, 2012, 28(8): 167-174.
YU Yajun, ZHOU Hailing, FU Hong, et al. Modeling method of corn ears based on particles agglomerate[J]. Transactions of the CSAE, 2012, 28(8): 167-174. (in Chinese)
16刘连峰, 廖淑芳. 弹塑性自黏结颗粒聚合体碰撞破损的离散元法模拟研究[J]. 应用力学学报, 2015, 32(3): 435-440.
LIU Lianfeng, LIAO Shufang. Discrete element modeling of impact attritions of agglomerates of autoadhesive elastoplastic particles[J].Chinese Journal of Applied Mechanics, 2015, 32(3): 435-440. (in Chinese)
17胡国明. 颗粒系统的离散元素法分析仿真[M]. 武汉: 武汉理工大学出版社, 2010.
18刘扬, 韩燕龙, 贾富国, 等. 椭球颗粒搅拌运动及混合特性的数值模拟研究[J]. 物理学报, 2015, 64(11): 114501.
LIU Yang, HAN Yanlong, JIA Fuguo, et al.Numerical simulation on stirring motion and mixing characteristics of ellipsoid particles[J]. Acta Physica Sinica,2015, 64(11): 114501. (in Chinese)
19陈进, 周韩, 赵湛,等. 基于EDEM的振动种盘中水稻种群运动规律研究[J]. 农业机械学报, 2011, 42(10): 79-83.
CHEN Jin, ZHOU Han, ZHAO Zhan, et al.Analysis of rice seeds motion on vibrating plate using EDEM[J].Transactions of the Chinese Society for Agricultural Machinery,2011, 42(10): 79-83. (in Chinese)
20彭飞, 杨洁, 王红英, 等. 小麦粉摩擦特性的试验研究[J]. 中国粮油学报, 2015, 30(8): 7-12.
PENG Fei, YANG Jie, WANG Hongying, et al.Experimental research on friction characteristics of wheat meal[J].Journal of the Chinese Cereals and Oils Association, 2015,30(8):7-12. (in Chinese)
21中国农业大学. 一种基于注入法原理的休止角测定装置: 201320101172.9 [P]. 2013-03-06.
22杨杰. 基于DEM的立式干燥机颗粒流仿真模拟研究[D]. 武汉:华中农业大学, 2012.
YANG Jie. Simulation study of particles flow on the vertical dryer based on DEM[D]. Wuhan: Huazhong Agricultural University, 2012. (in Chinese)
23王国强, 郝万军, 王继新, 等. 离散元法及其在EDEM上的实践[M]. 西安: 西北工业大学出版社, 2010.
24张旭华. 颗粒饲料冷却过程计算机数值模拟[D]. 武汉:华中农业大学, 2004.
ZHANG Xuhua. Computer numerical simulation of pellet feed in cooling process[D]. Wuhan: Huazhong Agricultural University, 2004. (in Chinese)
25沈杰. 平底仓桨叶取料过程分析与试验研究[D]. 南京:南京理工大学, 2016.
SHEN Jie. Research on the discharging process of flat-bottomed bin paddle feeder[D]. Nanjing: Nanjing University of Science and Technology, 2016. (in Chinese)
26闫银发, 孟德兴, 宋占华, 等. 槽轮式补饲机颗粒动力学数值模拟与试验[J/OL]. 农业机械学报, 2016, 47(增刊): 249-253.http:∥www.j-csam.org/jcsam/ch/reader/view_abstract.aspx?flag=1&file_no=2016s038&journal_id=jcsam. DOI:10.6041/j.issn.1000-1298.2016.S0.038.
YAN Yinfa, MENG Dexing, SONG Zhanhua, et al. Particle kinetic simulation and experiment for flute-wheel feeding machine[J/OL]. Transactions of the Chinese Society for Agricultural Machinery, 2016, 47(Supp.): 249-253. (in Chinese)
27武涛, 黄伟凤, 陈学深, 等. 考虑颗粒间黏结力的黏性土壤离散元模型参数标定[J]. 华南农业大学学报, 2017, 38(3): 93-98.
WU Tao, HUANG Weifeng, CHEN Xueshen,et al. Calibration of discrete element model parameters for cohesive soil considering the cohesion between particles[J]. Journal of South China Agricultural University, 2017, 38(3): 93-98.(in Chinese)
猜你喜欢
当代水产(2022年8期)2022-09-20
粮食与饲料工业(2022年2期)2022-04-27
中学生数理化(高中版.高考理化)(2021年9期)2021-11-05
小学生学习指导(中年级)(2021年3期)2021-04-06
小学生学习指导(低年级)(2020年9期)2020-11-09
中国动物保健(2019年12期)2019-03-24
小学生学习指导(高年级)(2018年3期)2018-11-29
小学生学习指导(中年级)(2018年9期)2018-11-29
物理教学探讨(2017年11期)2017-12-21
江苏农业科学(2016年9期)2016-11-28