基于影像与坡度数据融合的梯田田块分割方法
2018-04-19 00:39张宏鸣杨勤科杨江涛王美丽
农业机械学报 2018年4期
张宏鸣 胡 勇 杨勤科 杨江涛 王美丽 张 炯
(1.西北农林科技大学信息工程学院, 陕西杨凌 712100; 2.西北大学城市与环境学院, 西安 710069;3.西北农林科技大学水利与建筑工程学院, 陕西杨凌 712100;4.南加州大学神经影像学和信息学研究所, 洛杉矶 CA 90033)
0 引言
梯田是在丘陵山坡地上沿等高线方向修筑的条状阶台式或波浪式断面的田地。梯田的修筑在很大程度上开发了坡耕地的农业生长潜力,具有蓄水、保土作用[1]。我国梯田广泛分布在北方黄土高原区和南方低山丘陵区。梯田的修建,极大地改变了地表起伏程度,地形特征变化较大。由于高精度梯田数据较难获得,因此,前人的研究多集中在如何构建适合的梯田数字高程模型(Digital elevation model,DEM)[1-2]上。尽管在侵蚀模型中,考虑到梯田的水土保持作用,如通用土壤流失方程的P(工程)因子[3],中国土壤侵蚀方程中的E(水土保持措施)因子[4],当将这些模型应用到区域尺度时,仅仅用一个系数作为参考是不够精确的。因此,为了对梯田地形特征进行更加精确的分析,有效而准确地分割并提取梯田成为必需。
地形特征的提取方法众多,如基于DEM对沟缘线的提取[5-7]、对坡沟系统的提取[8];基于遥感影像对道路信息的提取[6,9]、对地形特征的增强[10];基于图像的海岸线[11]和湖岸线[12]提取等。由于梯田间距通常在几米或几十米之间,间距窄小,遥感影像或地形图等分辨率较难达到对梯田田块进行提取的要求。
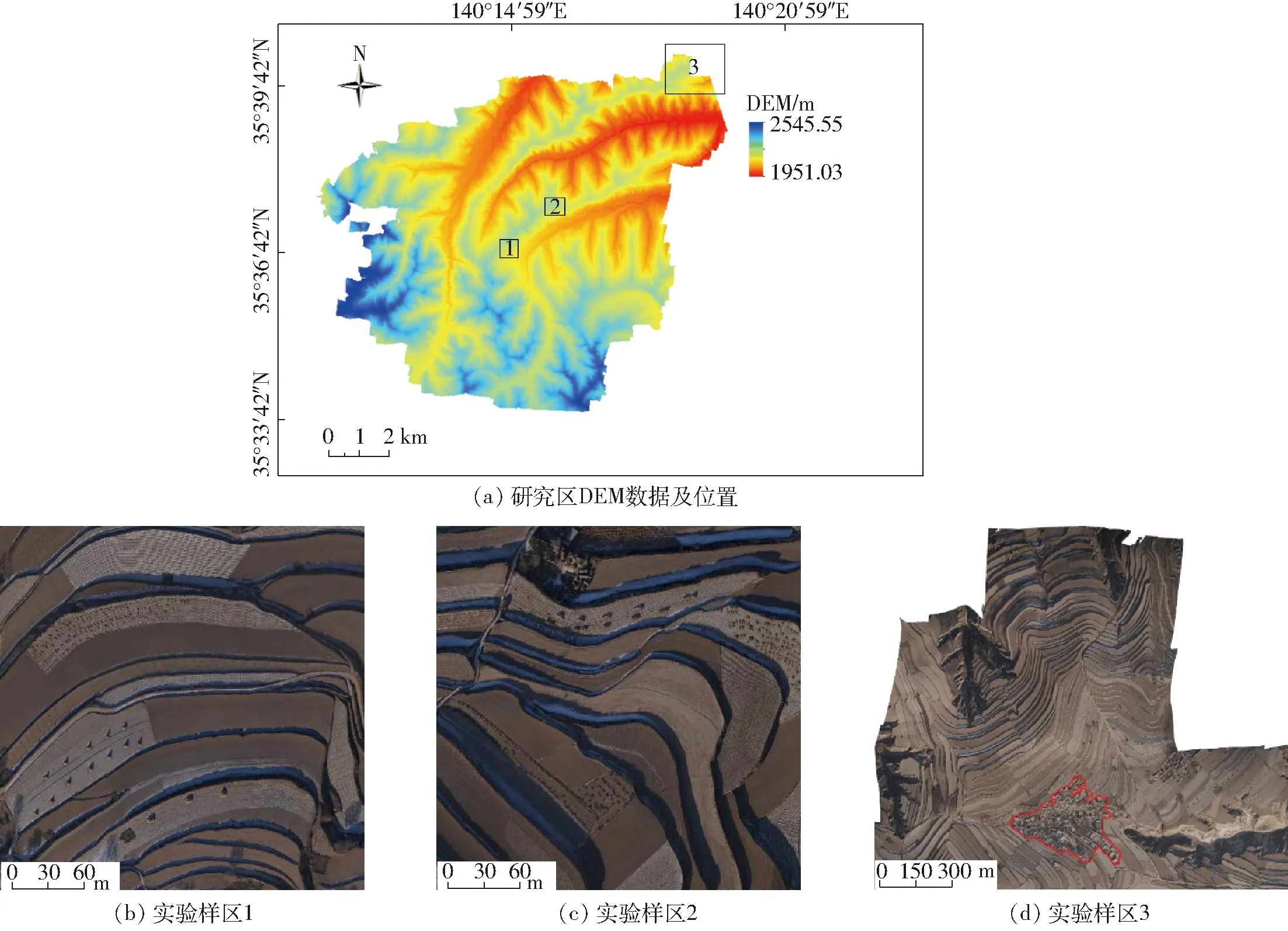
图1 研究区Fig.1 Study area
DIAZ-VARELA等[13]采用面向对象的方法对大范围的梯田区和非梯田区进行了分类。MEKURIAW等[14]基于谷歌影像进行水土保持工程措施提取。但受空间分辨率影响,效果一般。ECKERT等[15]利用高分辨率遥感影像,采用边缘检测方法,对梯田进行分割,但数据精度不高,梯田边缘断点较明显,不够连续。ZHANG等[16]通过模板匹配算法对梯田区进行提取,但由于受梯田田面干扰较大,以及影像数据分辨率较低,不能精确地对梯田田块进行提取。ZHAO等[17]基于面向对象法,结合DEM数据和影像数据对大面积梯田区域进行了提取。目前,对梯田田块分割与提取的研究报道较少。
本文在无人机技术研究基础上[18-19],通过无人机航空摄影测量获取大面积、高精度梯田正射影像。基于改进的边缘检测方法,对正射影像和坡度数据进行粗提取、去除伪边缘和噪声、边缘精细提取、梯田分割。
1 研究区域和数据基础
1.1 研究区域
黄土高原地区坡面水土流失严重,为减少坡面水土流失和增加农作物产量,各类山坡坡面上修建了梯田和鱼鳞坑等人工工程设施[20]。甘肃省榆中县从20世纪90年代起开始逐渐大面积修建梯田,县区内梯田面积较大,范围清晰。本文选取榆中县龙泉乡附近的常见旱梯田为研究区,该研究区的地理位置为东经104°10′58″~104°19′51″,北纬35°34′4″~35°40′56″,该研究区中内梯田形态具有一定的典型性。图1a是该研究区DEM数据及其所在地理位置。根据田面坡度的不同,梯田一般分为水平梯田、坡式梯田、隔坡梯田和软埝梯田[21],本文所研究梯田主要是水平梯田。
1.2 数据基础
研究区图像于2016年3月拍摄,风力小于4级,天气晴朗,能见度高。全程总计耗时约24 h。采用安翔动力开发的AF1000型无人机,翼展2.7 m,质量14 kg,航时3 h,有效载荷2 kg,航高90 m左右,搭载SONY A5100型相机,单幅影像包含面积约340 m×500 m,影像分辨率0.05 m,基于精度要求,样区范围共布设83个地面控制点,主要分布在梯田边缘、道路交叉口中心,使用RTK进行测量,可用于空间运算和精度检测。同时用这些点来检测影像集合定位精度,保证校正影像在侵蚀检测中的基本应用需求。数据处理采用Agisoftphotoscan软件,导入影像、POS数据及控制点数据,将整个区域分成25个区块进行处理,每块图像平均5 000幅左右,对每块逐一进行点云提取和立体模型建立,最后进行合并、纹理提取,获得数字表面模型(Digital surface model,DSM)[22],采用Xian 1980 3 Degree GK CM 108E投影。由于研究区在该时间段几乎没有植被覆盖,建筑用地较少,可通过对点云数据进行分类,分为地面点和非地面点两类,将非地面点作为噪声处理,通过滤波后得到剔除非地面点的DEM数据,DEM分辨率为0.5 m。依据无人机影像制作的1∶500地形图的平面和高程精度均满足《1∶500 1∶1 000 1∶2 000 地形图航空摄影测量内业规范》对1∶500平地、丘陵的成图要求。
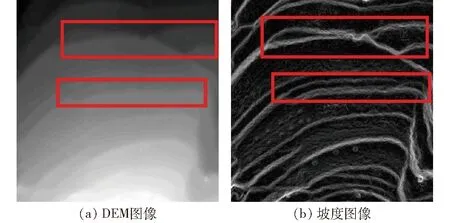
图2 DEM图像及坡度数据图像Fig.2 Digital elevation model image and slope data image
由于DEM数据在梯田边缘处的变化没有坡度数据明显(图2红色边框区域),本文通过ArcGIS计算DEM坡度,生成坡度数据,分别使用无人机正射影像、坡度及两种数据结合对3块区域进行梯田提取。实验样区1梯田主要特征是田面光谱复杂,但边缘特征较明显,形状规则(图1b)。实验样区2主要特点是田面纹理复杂,梯田形状不规则,边缘弯曲度较大(图1c)。实验样区3为大尺度的梯田区范围,含有各种复杂地物(图1d),其中红线标注的区域是居民区。
为提高梯田的提取精度,本文在对研究区现场进行勘察后,按多种特征对研究区地物进行了描述:①梯田边缘:梯田田块边界,长度较长,坡度较大,坡度变化较小。②非梯田丘陵:形状不规则面积较大,坡度较大,坡度变化较大,正射影像上呈暗黑色。③居民区:区域形状规则面积较小,屋面高程相同,边缘处坡度较大且不存在侧坡。④道路:形状不规则,面积较小,路面成条带状,边缘处坡度较小,且坡度变化率较小。
根据对研究区的特征分析,本文结合坡度数据和无人机正射影像,建立梯田区地物特征规则(表1),作为边缘检测规则。

表1 梯田区地物特征规则Tab.1 Terraced area features rule
2 研究方法
无人机正射影像的梯田内部纹理和形状等细节较复杂,本文将坡度数据和无人机正射影像数据结合,利用一种改进的边缘分割方法,对梯田区的田块进行分割。主要步骤为:①数据预处理。②基于边缘检测算法对梯田的粗边缘分割。③通过区域生长算法,去除梯田边缘图中的伪边缘。④对正射影像和坡度图进行叠加和边缘连接,实现边缘精细提取。⑤基于区域填充算法,对梯田田块分割。最终提取结果与手工标注方法进行对比及精度评价。方法流程如图3所示。

图3 方法流程图Fig.3 Flow chart of method
2.1 数据预处理
无人机正射影像受田面堆积物和种植物的干扰,田面上存在复杂的细节条纹和点状干扰(图4a),不利于梯田分割。为降低图像中田面复杂的细节干扰又不使田面主要的边缘结构模糊,本文通过灰度图像转换(图4b)和数据平滑(图4c)进行预处理。彩色正射影像转换成灰度图像的公式为
F(i,j)=0.299F(i,j)r+0.299F(i,j)g+
0.299F(i,j)b
(1)
式中F(i,j)——像素点(i,j)处转换后的灰度
F(i,j)r——点(i,j)处的彩色图像红色分量
F(i,j)g——点(i,j)处的彩色图像绿色分量
F(i,j)b——点(i,j)处的彩色图像蓝色分量
平滑方法采用高斯平滑[23],即采用3×3的窗口,均值为零、方差为1的高斯核进行高斯平滑处理,公式为
(2)
其中
δ=1m=3n=3
式中f(i,j)——像素点(i,j)处的灰度
经过平滑后田面内部细节纹理变模糊,但尖锐的边缘信息得以保留(图4c红色边框部分),将更有利于后续梯田边缘的检测。
2.2 梯田提取算法
2.2.1改进Canny边缘检测算子提取梯田边缘

图4 图像平滑处理对比Fig.4 Comparison of smooth processing diagrams
Canny边缘检测算子[24]主要包括高斯滤波平滑图像、计算梯度的幅值和方向、对梯度幅值进行非极大值抑制、双阈值方法检测和连接边缘4部分[25]。与Sobel、 Roberts等边缘检测算子相比[26],Canny算子具有定位准确、单边缘响应和信噪比高等优点,目前应用较广。但由于梯田田面存在大量复杂纹理特征,容易检测出虚假边缘,需要对Canny算子进行改进。本文根据表1的边缘检测规则剔除坡度和梯田影像数据的伪边缘,再对该数据进行叠加、膨胀处理。算法分为3步:
(1)对平滑后的梯田影像数据和坡度数据中的像素点(m,n),使用一阶微分算子H1、H2进行卷积计算,得到该点的梯度和方向,即
(3)
(4)
(5)
式中Gx(m,n)、Gy(m,n)——像素点(m,n)处的x方向梯度、y方向梯度
G(m,n)、θg(m,n)——像素点(m,n)处的梯度、方向
f(m,n)——像素点(m,n)处的灰度
全局梯度并不能确定边缘,为确定梯田边缘必须保留局部最大值,并对非极大值梯度的2个阈值th1和th2进行抑制,两者关系为th1=0.5th2,进而得到梯田提取的候选边缘。
(2)根据表1中描述的梯田中地物特征规则,对提取的候选边缘进行遍历判断,步骤如下:①对图像顺序扫描找到第1个没有归属且满足梯田边缘规则的像素点,设该像素点为(x0,y0),将其压入栈内。②以(x0,y0)为中心, 考虑(x0,y0)的8邻域没有归属的像素点(x,y),如果(x,y)满足梯田边缘规则, 将(x,y)与(x0,y0)合并(在同一区域内), 同时将(x,y)压入堆栈。③从堆栈中取出一个像素点,把它当作(x0,y0)返回到步骤②。④当堆栈为空时判断合并的区域像素个数是否满足梯田边缘规则中的边缘长度,若满足则将该区域标记为梯田边缘并返回到步骤①;如不满足,则将该区域剔除并返回到步骤①。⑤重复步骤①~④直到图像中的每个点都有归属时结束。
(3)梯田正射影像数据在进行边缘提取后,梯田边缘处的梯度较强,但田面受纹理干扰存在伪边缘。坡度数据中,梯田田面梯度几乎为零,但梯田边缘处梯度也相对较弱。因此通过设置有效叠加公式
(6)
式中E——叠加后边缘梯度T——阈值
E1——坡度数据边缘梯度
E2——正射影像数据边缘梯度
对坡度数据的边缘梯度E1和正射影像数据的边缘梯度E2进行叠加,并设置阈值T将影像边缘图和坡度边缘图进行有效合并,得到更加精确的梯田边缘数据。

图6 实验样区2梯田边缘提取对比图Fig.6 Example 2 terraced edge extraction comparison images
经过以上边缘叠加后,为保证田面的边缘连续不断裂,采用膨胀算法[27]对叠加合并边缘操作,让断裂的边缘连接在一起,为后续梯田区田块填充提供基础。
2.2.2梯田区田块填充和统计
在梯田边缘提取的基础上,本文利用区域生长算法[28]对梯田区域内的每块非边缘区域进行区域合并,并设置计数器Index来统计合并的区域个数以及各区域含有的像素数。步骤如下:①顺序扫描找到第1个未合并的种子像素作为生长的起点,将种子像素周围邻域非边缘像素点合并到种子像素所在的区域中。②新的像素继续作为种子向四周生长,直到没有满足条件的非边缘点像素可以包括进来,并记下区域像素个数。③重复步骤①、②直到图像中每个像素都完成计数。算法流程如图5所示。
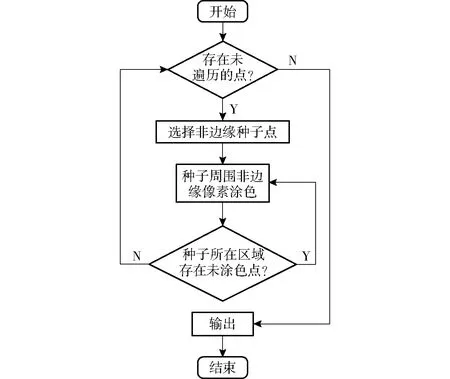
图5 填充算法流程Fig.5 Flow chart of fill algorithm
2.3 方法对比与精度验证
2.3.1方法对比
本文用面向对象[29]的方法与改进的边缘检测方法完成梯田边缘的提取,并进行对比。利用较好的坡度边缘提取结果与无人机正射影像边缘叠加(图6),可以看到本文方法在剔除伪边缘干扰(红色部分)的同时又较好地保留了蓝色框中的梯田边缘,而面向对象方法受干扰严重。
2.3.2精度验证
依据梯田田块提取结果与目视解译数据的吻合程度可以判断出本文方法的效果。参考对象一致性误差(OCE)分割评价准则[30],本文建立梯田田块提取评价标准为
(7)
(8)
式中S——算法精度
Ni——第i块梯田中像素点个数
Mi——第i块梯田中目视解译的像素个数真值
AC——田块的提取正确率
ACi——第i块梯田田块的提取正确率
AC越小表示提取出的单块梯田和目视解译相比重合度越小,算法正确率越小,AC越大,表示算法提取出的梯田田块与目视解译相比重合度比较大,因此正确率比较高。另外,S越大表示该算法在梯田区提取田块的整体正确率越高。
3 结果与讨论
3.1 梯田田块提取的效果
(1)实验样区1
从该区域的本文算法提取田块和目视解译梯田田块对比来看,梯田田块提取基本一致,但是梯田田块提取也出现过分割情况,本文算法在分割提取块号13的梯田后将其分裂成2块,如图7b、7c中1号蓝色框所示。出现这种现象的原因主要是在实际环境中此处有一条道路,对分割产生了影响。同时本文算法在分割过程中也存在漏分割情况,如图7b、7c中2号蓝色区域所示。两块梯田经提取后合并成一块梯田,出现这种情况是由于实际影像数据和坡度数据在梯田田块边缘处特征不明显,如图7a中的2号区域所示。
(2)实验样区2
从梯田田块提取的结果对比来看,本文算法也存在2处漏分割现象,在图8c的1号框中出现田块提取漏分割的主要原因为实际梯田田坎处有断裂,导致提取的边缘不封闭。在图8c的2号框中出现的提取漏分割主要是因为此处的坡度和影像数据特征不明显。
(3)实验样区3
分割结果如图9所示,从分割结果来看,在大区域中,由于图像特征复杂(含有房屋、丘陵等),或体型特征变化不明显(窄小的田块、田坎不突出),导致分割出现了漏分割和误分割情况,在图9b的1号框中,主要因为房屋的干扰导致误分割,在图9b的2号框中,主要是因为田坎特征变化不明显导致漏分割的出现。图9c为手工去除居民区部分的梯田分割结果。

图7 实验样区1田块提取结果Fig.7 Example 1 terraced extraction results

图8 实验样区2田块提取结果Fig.8 Example 2 terraced area extraction results
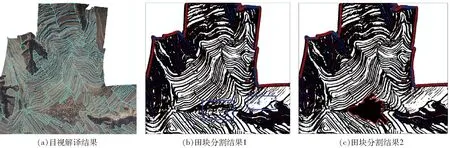
图9 实验样区3分割结果Fig.9 Example 3 terraced partition results
3.2 梯田田块提取精度
通过精度计算公式,对梯田分割、填充后的梯田田块进行正确率对比,实验样区1中的梯田田块提取正确率结果如表2所示。梯田提取正确率在田块面积较小的区域正确率比较小,如第3号梯田田块,像素点254个,其提取的正确率只能达到26%,效果较差。在面积较大的田块区域,提取正确率较高,如第4、5、9号梯田田块,其正确率可达90%以上,效果较好,这主要因为该样区干扰因素较少,大面积田块容易区分。本文算法在实验样区1总精度达86.9%,与实验样区1类似。在实验样区2,尽管有房屋的干扰但房屋较集中,且小块梯田少,因此效果比实验样区1的正确率高,总精度达89%。在实验样区3中,图像特征复杂(含有房屋、道路、冲沟、山地等),或体型特征变化不明显导致梯田分割效果较差,提取的总梯田像素个数为2 388 248个,错提取像素个数为1 257 932个,总精度65.5%。而通过手工去除居民区后,提取的总梯田像素个数为2 880 482个,错提取像素个数为765 698个,总精度达79%。3个样区的平均精度可达84.9%。
4 结论
(1)无人机航空摄影测量方法获取的正射影像数据可用于梯田分割,但原始数据中地表杂物对分割有一定影响,结合解译的坡度后,能够过滤掉部分梯田干扰信息。

表2 本文算法提取实验样区1田块的正确率Tab.2 Accuracy of example 1 terraces field extracted by proposed algorithm
(2)区域生长算法可快速生成较为闭合的梯田田块边缘,能够有效解决梯田边缘检测中边缘不连续的问题,提取精度较面向对象方法要高,是梯田分割方法的一次有效探索。
(3)梯田区的道路、山丘、冲沟等对梯田田块的准确分割影响较大,尤其在大范围梯田提取时,该方法还略有不足。通过深度学习等方法对不同地物特征进行学习、训练,有望在大尺度数据提取方面获取更好的结果。
1张宏鸣, 宋泽鲁, 杨江涛, 等. DEM超分辨率重构对梯田坡度提取的影响研究[J/OL]. 农业机械学报, 2017,48(1): 112-118,138. http:∥www.jcsam.org/jcsam/ch/reader/view_abstract.aspx?file_no=20170115&flag=1.DOI:10.6041/j.issn.1000-1298.2017.01.015.
ZHANG Hongming,SONG Zelu,YANG Jiangtao, et al. Influence of DEM super-resolution reconstruction on terraced field slope extraction[J/OL].Transactions of the Chinese Society for Agricultural Machinery,2017,48(1):112-118,138.(in Chinese)
2祝士杰, 汤国安, 张维, 等. 梯田DEM快速构建方法研究[J]. 测绘通报, 2011(4): 68-70,82.
ZHU Shijie, TANG Guoan, ZHANG Wei, et al. Rapid modeling method for terrace digital elevation model [J]. Bulletin of Surveying and Mapping, 2011(4): 68-70,82. (in Chinese)
3ZHANG H, WEI J, YANG Q, et al. An improved method for calculating slope length (λ) and the LS parameters of the revised universal soil loss equation for large watersheds[J]. Geoderma,2017, 308: 36-45.
4LIUB Y, ZHANG K L, XIE Y.An empirical soil loss equation[C]∥Proceedings of 12th International Soil Conservation Organization Conference, 2002:21-25.
5刘玮, 李发源, 熊礼阳, 等.基于区域生长的黄土地貌沟沿线提取方法与实验[J]. 地球信息科学学报, 2016, 18(2): 220-226.
LIU Wei, LI Fayuan, XIONG Liyang, et al. Shoulder line extraction in the Loess Plateau based on region growing algorithm [J]. Journal of Geo-Information Science, 2016, 18(2): 220-226.(in Chinese)
6李敏, 杨昕, 陈盼盼, 等. 面向点云数据的黄土丘陵沟壑区沟沿线自动提取方法[J]. 地球信息科学学报, 2016, 18(7): 869-877.
LI Min, YANG Xin, CHEN Panpan, et al. Method of automatic shoulder line extraction in the loess hilly area based on point cloud data [J]. Journal of Geo-Information Science, 2016, 18(7): 869-877. (in Chinese)
7李小曼, 王刚, 李锐. 基于DEM的沟缘线和坡脚线提取方法研究[J]. 水土保持通报, 2008, 28(1): 69-72.
LI Xiaoman, WANG Gang, LI Rui. A DEM based method for extraction of valley shoulder line and slope heel line [J]. Bulletin of Soil and Water Conservation, 2008, 28(1): 69-72. (in Chinese)
8徐靖宇, 邱丽静. 基于GIS的湖南省山洪沟提取技术及其应用[J]. 地理科学研究, 2016, 5(2): 75-79.
XU Jingyu, QIU Lijing. Extraction and application of flash flood ditch in Hunan Province based on GIS [J]. Geographical Science Research,2016, 5(2): 75-79. (in Chinese)
9谭媛, 黄辉先, 徐建闽, 等. 基于改进 Sobel 算子的遥感图像道路边缘检测方法[J]. 国土资源遥感, 2016, 28(3): 7-11.
TAN Yuan, HUANG Huixian, XU Jianmin,et al. Road edge detection from remote sensing image based on improved Sobel operator[J]. Remote Sensing for Land & Resources, 2016, 28(3): 7-11. (in Chinese)
10程德强, 赵牡丹, 高春留, 等. 基于遥感影像的DEM地形信息增强表达研究——以梯田DEM构建为例[J]. 华中师范大学学报: 自然科学版, 2016, 50(3): 464-470.
CHENG Deqiang, ZHAO Mudan, GAO Chunliu,et al. Research on the enhanced expression of DEM terrain information based on remote sensing image—taking terrace DEM construction as an example[J]. Journal of Huazhong Normal University: Natural Sciences Edition, 2016, 50(3): 464-470. (in Chinese)
11毋亭, 侯西勇.海岸线变化研究综述[J]. 生态学报, 2016, 36(4): 1170-1182.
WU Ting, HOU Xiyong.Review of coastal changes [J].Acta Ecologica, 2016, 36(4):1170-1182.(in Chinese)
12顾智, 贾培宏, 李功成,等. 基于Canny算子的海南陵水双潟湖岸线提取技术[J]. 第四纪研究, 2016, 36(1): 113-120.
GU Zhi, JIA Peihong, LI Gongcheng, et al. Research on a technique of extracting coastline shoreline information extraction using the Canny edge detection operator for two coastal lagoons in Lingshui, Hainan Province[J]. Quaternary Research, 2016, 36(1): 113-120. (in Chinese)
13DIAZ-VARELA R A, ZARCO-TEJADA P J, ANGILERI V, et al. Automatic identification of agricultural terraces through object-oriented analysis of very high resolution DSMs and multispectral imagery obtained from an unmanned aerial vehicle[J]. Journal of Environmental Management, 2014, 134(1):117-126.
14MEKURIAW A, HEINIMANN A, ZELEKE G, et al. An automated method for mapping physical soil and water conservation structures on cultivated land using GIS and remote sensing techniques[J]. Journal of Geographical Sciences, 2017, 27(1): 79-94.
15ECKERT S, GHEBREMICAEL S T, HURNI H, et al. Identification and classification of structural soil conservation measures based on very high resolution stereo satellite data[J]. Journal of Environmental Management, 2017, 193(4):592-606.
16ZHANG Y, SHI M, ZHAO X, et al. Methods for automatic identification and extraction of terraces from high spatial resolution satellite data (China-GF-1)[J]. International Soil and Water Conservation Research, 2017, 5(1): 17-25.
17ZHAO H, FANG X, DING H, et al. Extraction of terraces on the Loess Plateau from high-resolution DEMs and imagery utilizing object-based image analysis[J]. ISPRS International Journal of Geo-Information, 2017, 6(6): 157.
18ZHANG H, YANG Q, LI R, et al. Extension of a GIS procedure for calculating the RUSLE equation LS factor[J]. Computers & Geosciences, 2013, 52: 177-188.
19张宏鸣, 杨勤科, 王猛, 等. 沟道截断对分布式土壤侵蚀学坡长提取的影响[J]. 水利学报, 2017, 48(5): 568-575.
ZHANG Hongming, YANG Qinke, WANG Meng, et al. Effect of channel networks cutoff on extraction of distributed erosion slope length[J]. Journal of Hydraulic Engineering, 2017, 48(5): 568-575.(in Chinese)
20赵卫东, 汤国安, 徐媛, 等. 梯田地形形态特征及其综合数字分类研究[J]. 水土保持通报, 2013, 33(1): 295-300.
ZHAO Weidong, TANG Guoan, XU Yuan, et al. Terrace morphological characteristics and its comprehensive digital classification [J]. Bulletin of Soil and Water Conservation, 2013, 33(1): 295-300.(in Chinese)
21WEI W, CHEN D, WANG L, et al. Global synthesis of the classifications, distributions, benefits and issues of terracing[J]. Earth-Science Reviews,2016, 159: 388-403.
22ZHANG L. Automatic digital surface model (DSM) generation from linear array images[D]. Zurich: Institute of Geodesy & Photogrammetry, 2005.
23谢勤岚. 图像降噪的自适应高斯平滑滤波器[J]. 计算机工程与应用, 2009, 45(16): 182-184.
XIE Qinlan. Adaptive Gaussian smoothing filter for image denoising[J]. Computer Engineering and Applications, 2009, 45(16): 182-184. (in Chinese)
24CANNY J. A computational approach to edge detection[M]. IEEE Computer Society,1986.
25王小俊, 刘旭敏, 关永. 基于改进Canny算子的图像边缘检测算法[J]. 计算机工程, 2012, 38(14): 196-198.
WANG Xiaojun, LIU Xumin, GUAN Yong. Image edge detection based on improved Canny operator [J]. Computer Engineering, 2012, 38(14): 196-198. (in Chinese)
26申家双, 翟京生, 郭海涛. 海岸线提取技术研究[J]. 海洋测绘, 2009, 29(6): 74-77.
SHEN Jiashuang, ZHAI Jingsheng, GUO Haitao. Study on coastline extraction technology [J]. Hydrographic Surveying and Charting, 2009, 29(6): 74-77. (in Chinese)
27邓仕超, 黄寅. 二值图像膨胀腐蚀的快速算法[J]. 计算机工程与应用, 2017, 53(5): 207-211.
DENG Shichao, HUANG Yin. Fast algorithm of dilation and erosion for binary image[J]. Computer Engineering and Applications, 2017, 53(5): 207-211. (in Chinese)
28ADAMS R, BISCHOF L. Seeded region growing[J]. IEEE Transactions on Pattern Analysis & Machine Intelligence, 2002, 16(6): 641-647.
29买凯乐, 张文辉. 黄土丘陵沟壑区遥感影像信息面向对象分类方法提取[J]. 农业机械学报, 2011, 42(4): 153-158.
MAI Kaile, ZHANG Wenhui. Object-oriented classification approach for remote sensing imagery information extraction in loess hilly-gully region[J].Transactions of the Chinese Society for Agricultural Machinery, 2011, 42(4): 153-158. (in Chinese)
30POLAK M, ZHANG H, PI M. An evaluation metric for image segmentation of multiple objects[J]. Image & Vision Computing, 2009, 27(8): 1223-1227.
猜你喜欢
农业技术与装备(2022年8期)2022-10-21
儿童故事画报·自然探秘(2022年7期)2022-07-22
考试与评价·高二版(2020年4期)2020-09-10
科学养鱼(2020年7期)2020-08-27
福建基础教育研究(2020年3期)2020-05-28
视界观·上半月(2020年4期)2020-05-28
艺术品鉴(2019年12期)2020-01-18
土壤学报(2019年6期)2020-01-15
中国特种设备安全(2019年4期)2019-05-20
海峡影艺(2012年1期)2012-11-30