五自由度混联机器人尺度与结构优化设计
2018-04-19 00:41张东胜许允斗姚建涛赵永生
农业机械学报 2018年4期
鹿 玲 张东胜,2 许允斗,2 姚建涛,2 赵永生,2
(1.燕山大学机械工程学院, 秦皇岛 066004; 2.燕山大学河北省并联机器人与机电系统实验室, 秦皇岛 066004)
0 引言
并联机器人动平台和静平台之间由2条或多条运动链相连,同串联机器人相比具有结构紧凑,刚度高,承载能力大等特点,使其备受国内外学者的关注[1-3]。在航空、造船、汽车、核电等部门中许多零件的外形,如各种发动机叶片曲面、螺旋浆叶曲面、核岛蒸发器下封头表面等均为空间复杂曲面。通常情况下,这类复杂曲面零件的加工需要五轴联动[4-5]。一种方案是采用大承载能力的五或六自由度(DOF)并联机器人[6]实现这样的加工任务,但是由于这类多自由度并联机构的铰链和支链较多,容易受到铰链结构约束、支链干涉等因素的影响,致使动平台调姿态能力有限,而且动平台输出运动高度耦合,动力学建模困难,不易于实现控制,限制了其在机械加工领域的应用。另一种方案是采用基于结构简单、运动耦合较弱及制造成本低的少自由度并联机构构造5-DOF混联机器人[7-9],它既有并联机构承载能力大的特点,又有串联机构工作空间大且灵活的特点,是解决上述问题的有效途径。最为典型的是在两转一移(2R1T)3-DOF并联机构上串接2-DOF调姿摆头而形成的5-DOF混联机器人[10-13],比如:Neos Robotics公司开发研制的Tricept 5-DOF混联机器人,Exechon公司开发的LINKS-EXE700型新一代五轴加工中心,以及天津大学开发的TriVariant 5-DOF混联机器人,它们分别是在2R1T机构3UPS/UP 、2UPR/SPR及2UPS/UP上串接2-DOF摇摆头构成的混联机器人;德国Scharmann ECOSPEED系列五轴加工中心为在2R1T机构3PRS Z3 头基础上添加可移动工作台构成混联机器人(R、P、S和U分别表示转动副、移动副、球副和虎克铰)。
前述适用于复杂曲面零件加工的5-DOF混联机器人,其并联部分采用2R1T机构。对于2R1T并联机构,动平台2个转动自由度的轴线并不能任意选择。一般来说,并联机构的转动轴线可分为连续转轴和瞬时转轴2种类型:连续转轴是指并联机构可以持续围绕该转轴转动,而瞬时转轴则只能在某特定的姿势围绕该转轴转动[14-15]。由于存在2条连续转轴的2R1T并联机构易于实现轨迹规划、运动学参数标定和运动控制,相对于一般2R1T机构,具有更加广阔的应用前景。然而,目前存在2条连续转轴的2R1T机构还非常少,除了3UPS/UP和2UPS/UP机构作为Tricept和TriVariant 5-DOF混联机器人的核心功能部件外,还鲜有其他存在2条连续转轴的2R1T机构在混联机器人的应用实例报道。
本文以基于一种存在2条连续转轴且仅有9个单自由度关节的2R1T并联机构2RPU/UPR构造的5-DOF混联机器人[16]为研究对象,将对该5-DOF混联机器人结构尺寸、机械结构设计及机器人整体刚度进行分析。
1 构型描述
如图1所示,该5-DOF混联机器人包括2RPU/UPR并联机构、单自由度摆头、移动平台和机架。该混联机器人的并联部分是具有2条连续转轴且关节数目少的2R1T并联机构2RPU/UPR,在此并联机构的动平台上串联1个单自由度摆头,再附加可移动工作台构成完全具有连续转轴的5-DOF混联机器人。该并联机构的2条连续转轴,其中1条靠近定平台为UPR分支中U副链接定平台转动副轴线,另1条靠近动平台为动平台中2个U副中心点连线所在的直线,2条轴线分别如图1中R1和R2所示。绕靠近动平台转轴R2的转动可直接用于末端刀具绕1个方向的方位调整,绕靠近定平台转轴R1的转动用于实现水平方向的大范围移动,故在动平台上方串接1条轴线与靠近定平台转轴R2垂直的单自由度摆头,可用于实现末端刀具绕另1个方向的方位调整。可移动工作台移动方向与并联机构靠近定平台的转轴平行,用于实现工件的移动,从而构成五轴联动混联机器人。
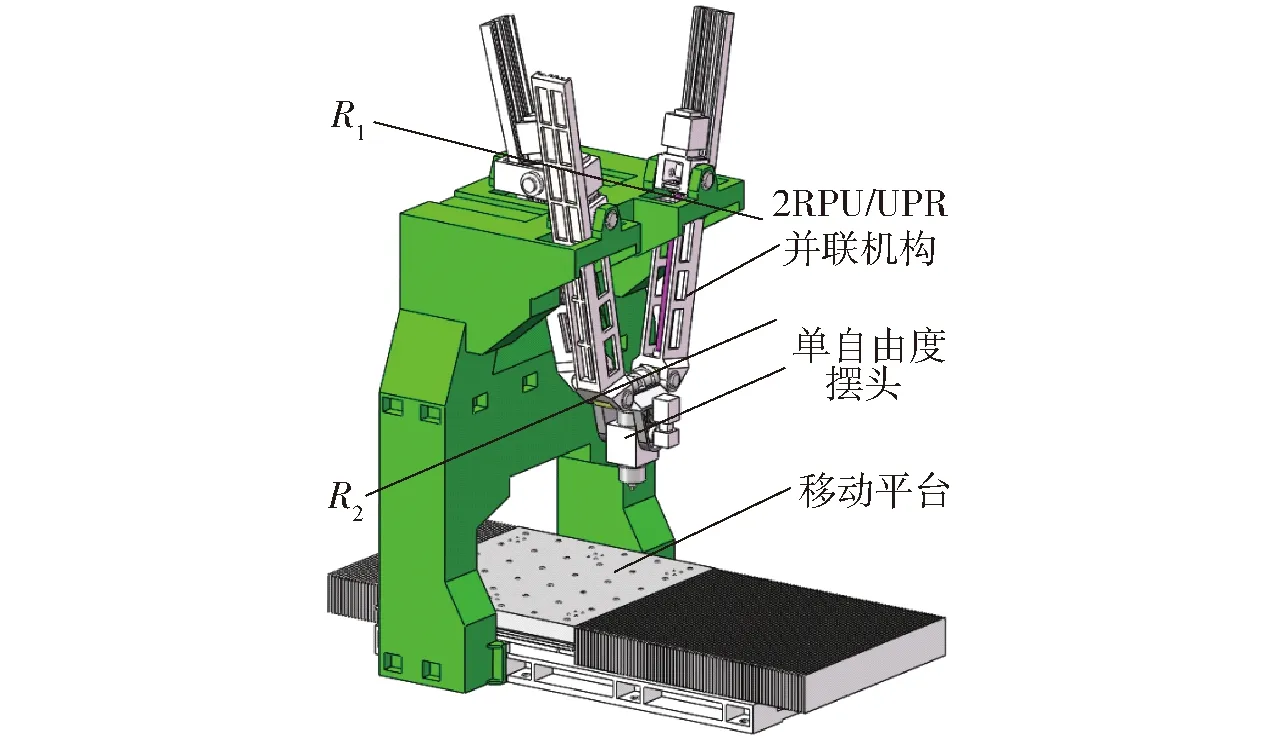
图1 5-DOF混联机器人结构示意图Fig.1 Schematic diagram of a 5-DOF hybrid manipulator
2 混联机器人结构尺寸
机器人优化主要包括轨迹优化[17]、拓扑优化[18-19]及尺寸优化[20-21]等,其中尺寸优化对机器人各运动关节的布局起到关键作用,其对机器人的性能尤为重要。对串联、并联以及混联机器人的结构尺寸,其优化过程大多需考虑机构的奇异性、关节约束、机构几何尺寸约束、力的传递性能和动态性能等条件。在机器人的设计阶段,机器人性能评价指标是对机器人性能的量化;用性能指标对机器人进行性能评价,可对机器人的设计起指导性作用。
2.1 并联机构2RPU/UPR尺寸优化
上述5-DOF混联机器人的机构简图如图2所示。根据并联部分2RPU/UPR的运动性质,可将其分解成2个含有约束的平面机构,所以该并联机构可以结合传动角的概念对其传递性能进行量化描述。
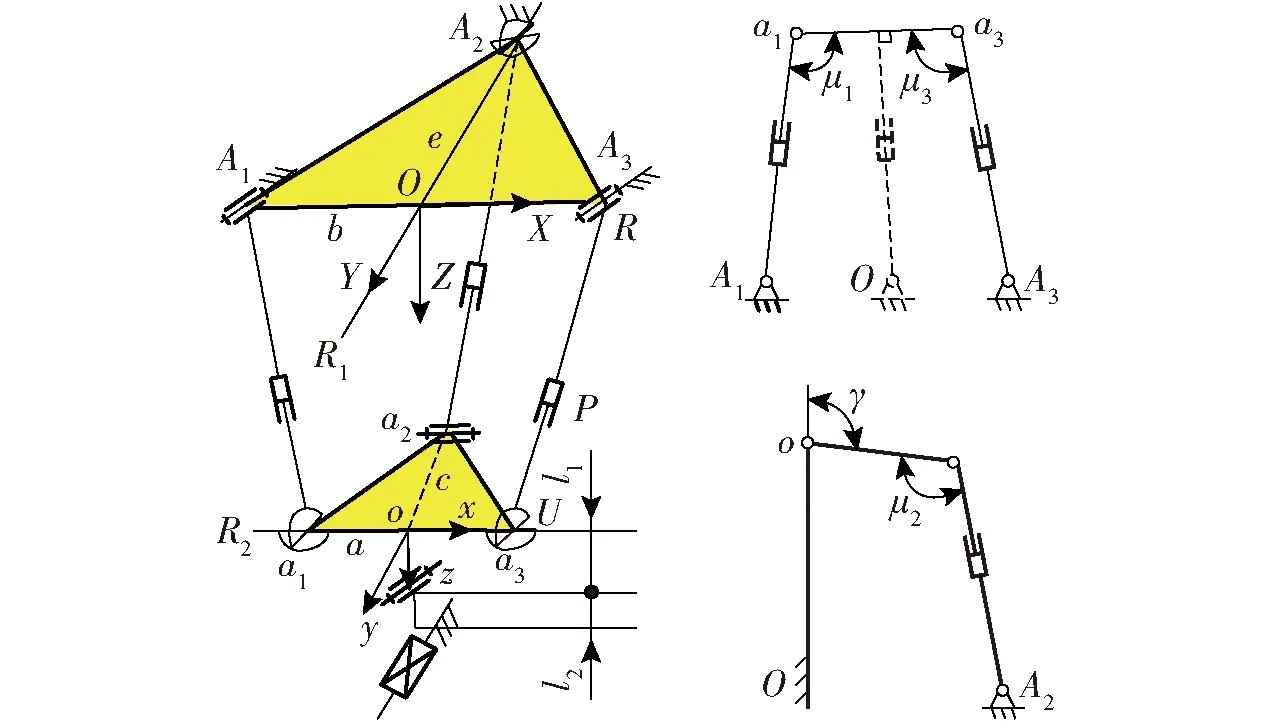
图2 2RPU/UPR并联机构Fig.2 2RPU/UPR parallel mechanism
参照文献[22],具有此类运动性能的并联机构可利用局部力传递性能指标(LTI)进行度量,LTI可表示为
χ=sin(TA)
(1)
其中
TA=μi(i=1,2,3)
由式(1)可知
0≤χ≤1
(2)
结合式(1)和式(2)以及传动角的概念可知,LTI的取值越大,机构的传递性能越好,反之,机构的传递性能较差,且易使机构接近于奇异位型,进而改变机构的运动性质,对机构造成损害。目前学者常用的有效传动角的取值范围为(45°, 135°)或(40°, 140°)[22]。该并联机构将基于下述3个性能指标进行尺寸优化:
(1)鉴于并联机构的空间运动性,LTI仅能反映机构瞬时位姿的力传递性能,所以为了在机构的工作空间范围内对其进行优化,可以将力传递性全域性能指标(GTI)作为尺寸优化的1个性能评价指标。GTI的表达式为
(3)
式中n——样点个数
(2)如图2所以,动平台的转动能力可以用角度γ进行描述,所以可将γ的大小在机构的整个工作空间范围内定义为动平台转动能力全域性能指标(GOC)。
(3)驱动分支的驱动力稳定性全域性能指标(GFS),可用于描述并联机构在整个工作空间范围内运动时,驱动关节的受力波动情况。GFS的表达式为
(4)
式中fi——分支i驱动力
上述3个性能指标中所涉及公式推导过程予以忽略。如图2所示,ai和Ai(i=1,2,3)分别为动平台和定平台运动副的中心点;动平台所在三角形为△a1a2a3,定平台所在三角形为△A1A2A3,且2个三角形为等腰相似三角形(其中a2和A2分别为三角形的顶点)。机构待优化参数为a、b、c和e,其中a为a1o的距离,b为A1O的距离,c为a2o的距离,e为A2O的距离;因为参数e可根据动平台和定平台的相似比求得,所以后续内容选取参数a、b和c为优化参数。为了便于并联机构2RPU/UPR尺寸优化,需要消除机构优化参数的物理属性,使物理参数a、b和c转换为无量纲参数变量r1、r2和r3,即
(5)
其中
式中D为归一化因数,为保障机构拥有3个自由度,并能顺利装配,无量纲参数r1、r2和r3应满足
(6)
根据式(5)和式(6),可将三维设计空间转换为等效的二维平面空间,其转换关系式为
(7)
式中s、t——二维空间的横纵坐标,如图3所示

图3 性能设计空间Fig.3 Performance design spaces
优化目标:力的全域传递性指标GTI大于0.94,动平台的转动能力全域性能指标GOC大于110,分支驱动力稳定性全域性能指标GFS小于0.865。基于上述所规划的3个性能指标:GTI、GOC和GFS可得到如图4所示的性能图谱。图4d中深色背景区域为满足上述3个性能指标的公共区域。例如,当选取图4d中坐标(1.4,0.7)时,并设a=200 mm,进而求得3个无量纲参数为(0.7, 1.438, 0.862),所以可求得D=285.714,然后借助式(5)可分别得到结构参数b、c和e。在对性能影响特别小的情况下,为加工制造方便,分别对求得参数取整可得b=410 mm,c=246 mm,e=506 mm。

图4 并联部分性能图谱Fig.4 Performance atlases of parallel part
2.2 串联单自由度摆头尺寸优化
机器人的一阶速度影响系数矩阵和二阶加速度影响系数矩阵是对机器人动态性能分析的基础,混联机器人速度、加速度求解过程中涉及了一阶影响系数和二阶影响系数矩阵。为了获得混联机器人较佳的动力学性能指标,对图2中结构尺寸l1和l2进行优化。
并联机构的结构尺寸根据上节优化数据可知(a,b,c)=(200, 410, 246) mm。令l1和l2为可变参数,其中l1和l2的变化范围是200~400 mm,变化步长为5 mm。机构性能指标分别为速度全域性能指标ηv和加速度全域性能指标ηa[23],二者的表达式为
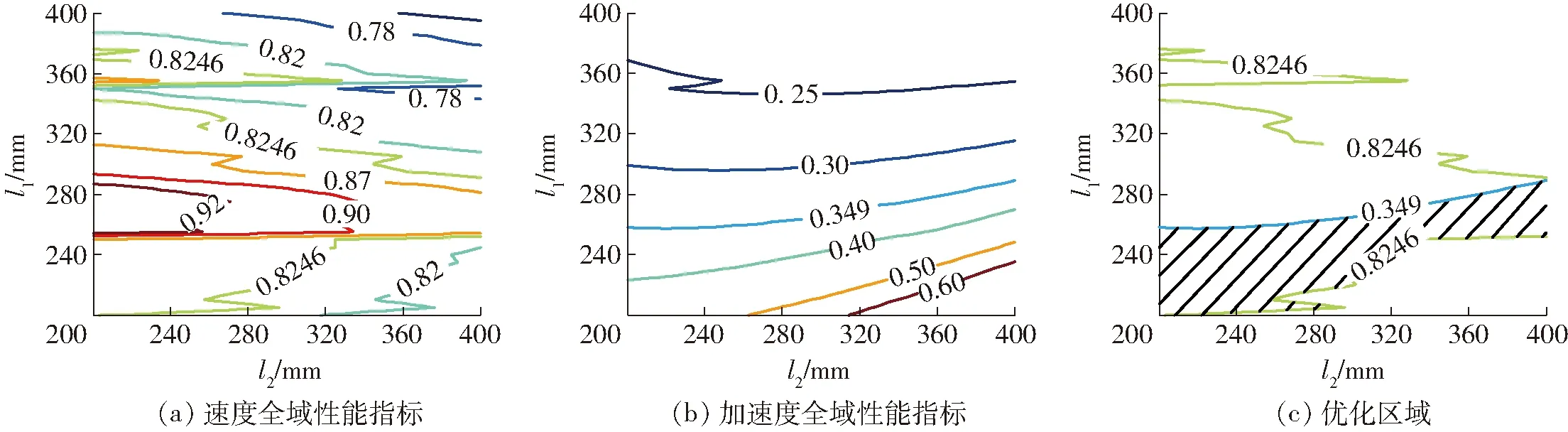
图5 串联部分性能图谱Fig.5 Performance atlas of serial part
(8)
其中
KJ=‖J‖‖J+‖
式中J——一阶速度影响系数矩阵
Hi——二阶加速度影响系数矩阵
在确定了变量和取值范围后,搜索整个工作空间,并在工作空间内计算速度和加速度全域性能指标。为使分析结果表达的清晰,类似于并联机构结构尺寸的优化,将性能指标和结构尺寸结合,得到二维的全域性能图谱,如图5所示。
图5a为不同尺寸机构的速度全域性能指标ηv,图5b显示的是不同尺寸机构的加速度全域性能指标ηa,图5c给出了基于速度全域性能指标ηv和加速度全域性能指标ηa所得的优化区域,图中ηv=0.349和ηa=0.8246为优化区域的中间值。
由图5可知,可以选出合适的l1和l2满足机构速度和加速度性能均较好的条件,所以在设计和选型时最好考虑上述优化的数据范围。
3 混联机器人的机械结构设计
机器人的结构设计对于机器人的整体性能,尤其是对机器人刚度、动态性能及工作空间等具有重要影响[24]。本节将针对混联机器人的动平台、并联机构分支及机架等关键部件的结构进行设计与分析。
3.1 动平台
动平台是混联机器人串联模块电主轴的载体,并通过转动副、虎克铰联接3条分支杆的关键部件。故设计时应考虑分支杆与动平台联接的运动副结构,以及于摇摆头连接的转动副结构。根据上述因素,设计出动平台三维模型如图6所示。图6中给出的2种不同形式的动平台结构主要区别在于电主轴驱动电机的安装位置和安装方式。
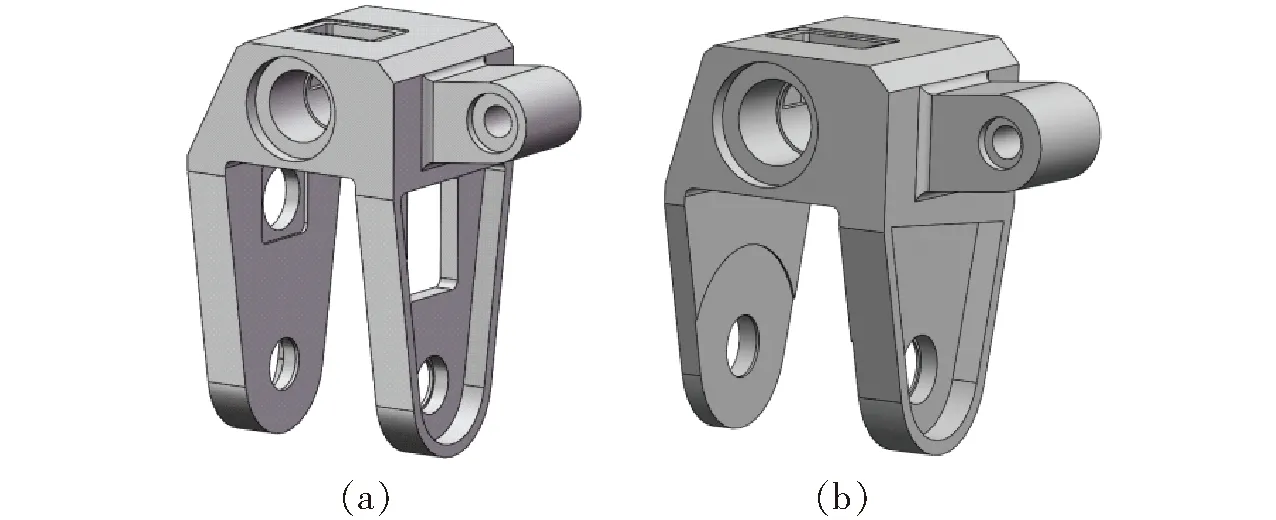
图6 动平台三维图Fig.6 3D-models of moving platform
在动平台上布置1个电机用以驱动电主轴作±45°的摆动(即单自由度摆头的摆角范围)。不同的动平台结构,单自由度摆头的驱动方式、传动方式及驱动器的布置方式将有所不同。为使结构紧凑并降低电主轴与动平台上端的距离,将摇摆头的驱动电机置于动平台座前端,电机直接联接减速器后输出转矩驱动电主轴摆动,在减轻动平台质量的同时,减小了机器人工作时末端对动平台的弯矩,有助于提高了动平台的相对刚度。2种不同结构的动平台与电主轴的装配结构关系如图7所示。
以图7b动平台结构为基准,设计动平台和3条分支杆的链接。动平台通过虎克铰与分支1、3链接,通过转动副与分支2链接,其中2个虎克铰设计为T型结构,如图8所示。此种设计方式有助于保障动平台虎克铰装配孔的同轴度,如图8中虚线所示通孔。
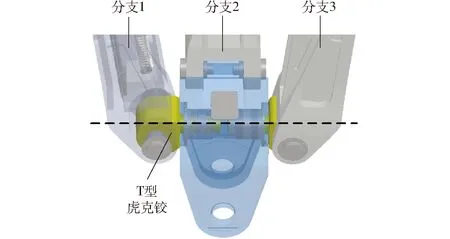
图8 分支杆与动平台的链接Fig.8 Connection between limbs and moving platform
3.2 分支杆
分支杆的结构分为固定杆长和可变杆长2种。固定杆长相比于可变杆长具有较大的刚度、制造容易等优势。本文设计的混联机器人3条分支均选用固定杆长的形式。为使结构更加紧凑,减小系统的转动惯量,选择体积较小的直流伺服电机固定在各分支与机架链接的运动副上,使其仅随分支摆动而不随分支移动。滚珠丝杠的驱动一端固定链接,另一端滑动链接(而非悬空),从而增强驱动环节的刚度和运动稳定性。伺服电机输出的扭矩通过联轴器联接滚珠丝杠传递到丝杠螺母上,丝杠螺母将回转运动转换为分支杆的直线运动,实现了移动副的运动形式。分支1和3结构完全相同,分支杆具体结构如图9所示。
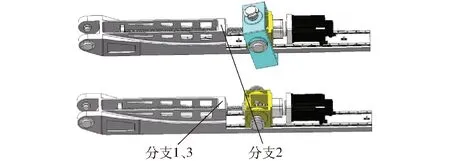
图9 分支杆结构Fig.9 Limb structure
3.3 机架设计
混联机器人机架是与工作台和地面联接的部件,它的刚度与结构强度直接影响到机器人的精度与寿命。本文将定平台与混联机器人机架一体化,上述分支链接机架的转动副和虎克铰相联的3对轴承座呈等腰三角形布置并直接固联于机架,整体拟采用铸造、螺栓链接和焊接3种加工及固结方式,具体结构方案如图10所示。
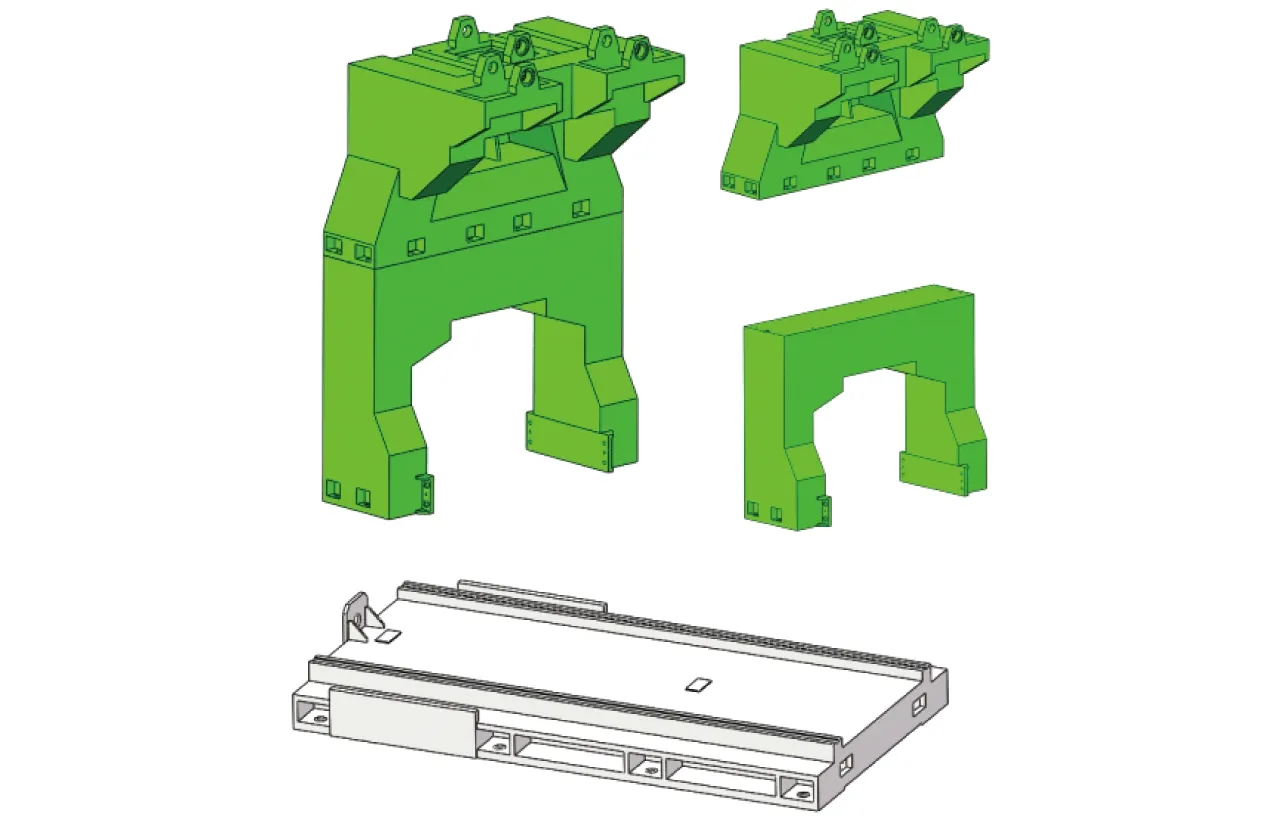
图10 混联机床机架结构图Fig.10 Base structure diagram of hybrid manipulator
4 有限元仿真
借助ANSYS有限元仿真软件对混联机器人进行静力学仿真。图11给出了混联机器人处于初始位姿时的整体边界约束及载荷施加情况。
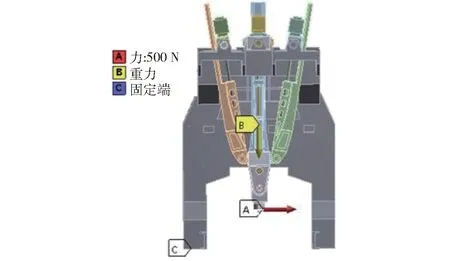
图11 初始位姿整机约束及载荷图Fig.11 Diagram of constraint and external loads at initial pose
在有限元中选取以下4个姿态进行静力学分析:① 位姿1:机床处于水平位置,电主轴偏移0°。② 位姿2:机床处于水平位置,电主轴前摆30°。③ 位姿3:机床处于水平位置,电主轴后摆30°。④ 位姿4:机床处于水平位置,电主轴左摆30°。
模型建立完成之后,分别对这4种位姿下的有限元模型进行相同的处理,如模型简化、结合部等效处理及网格划分等,然后进行仿真计算,得到5-DOF混联机器人整体变形量云图如图12a~12d所示,应力云图如图12e~12h所示。
将上述4种位姿下的机器人的变形及应力云图结果进行整理,结果如表1所示。
根据上述关于机器人的静力学分析研究可知,机器人的强度很大,刚度较为薄弱,故需针对机器人的主要部件分别进行结构优化。机架作为基础部件,其机构采用悬臂方式,主要是将机架底部和上部伸出部分改为中空结构,以筋板形式加强刚度,机架结构修改后如图13a所示。

图12 5-DOF混联机器人变形量/应力云图Fig.12 Deformation/stress cloud charts of 5-DOF hybrid manipulator
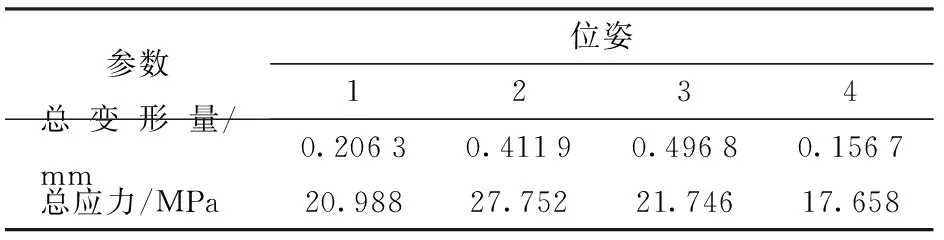
参数位姿1234总变形量/mm0.20630.41190.49680.1567总应力/MPa20.98827.75221.74617.658
分支杆的刚度对机器人整机的影响最大,需要尽可能提高其刚度,因而对支链上靠近转动关节处的加强肋板等进行了改进,优化前后的支链结构如图13b所示。动平台结构采用的是图7b所示结构。

图13 改进后结构Fig.13 Structures after modification
限于篇幅,以位姿1为例,对优化后机器人整机进行了静力学仿真分析,然后将变形量和应力仿真结果与结构改进前的仿真结果进行统计对比,如表2所示。
由表2中可看出,经过优化后机器人的整体刚度得到了较大程度的提高,整机质量减小了6.21%,其中Y方向的刚度提高最大为52.63%,并且X、Y和Z方向的刚度相差不大,尤其是X、Y方向刚度;另外,优化后机器人整体应力有所提高,但最大应力均不超过50 MPa,发生在动平台的驱动关节处,此处仿真材料选用的是铸钢310,其强度极限远远大于50 MPa,所以混联机器人优化后的整体性能进一步得到提升。

表2 机器人优化前后整体变形量、应力及质量对比Tab.2 Comparison of deformation, stress and mass before and after structure modification
5 结论
(1)基于力全域传递性能指标GTI、动平台转动能力全域性能指标GOC、分支驱动力稳定性全域性能指标GFS、速度全域性能指标ηv及加速度全域性能指标ηa分别对5-DOF混联机器人的并联和串联部分进行了尺寸优化设计,给出了相应的性能图谱及优化区域。
(2)为保证结构刚度,满足高精度作业的需求,按预定优化尺寸设计了关键零部件合理的机械结构形式。
(3)借助ANSYS有限元仿真软件对5-DOF混联机器人典型位姿进行静力学分析,根据仿真结果对机械机构进行优化,并对机器人优化前后的变形量及应力仿真结果进行对比分析,结果表明优化后机器人整体性能有显著提升。
1MERLET J P. Parallel robots[M]. New York:Springer Science & Business Media, 2012.
2李秦川, 柴馨雪, 陈巧红. 两转一移三自由度并联机构研究进展[J]. 科学通报, 2017(14):1507-1519.
LI Qinchuan, CHAI Xinxue, CHEN Qiaohong. Review on 2R1T 3-DOF parallel mechanisms[J]. Science China Press, 2017(14):1507-1519.(in Chinese)
3陈修龙, 蒋德玉, 陈林林,等. 冗余并联机构运动学性能分析与优化[J/OL]. 农业机械学报, 2016, 47(6): 340-347.http:∥www.j-csam.org/jcsam/ch/reader/view_abstract.aspx?flag=1&file_no=20160645&journal_id=jcsam. DOI: 10.6041/j.issn.1000-1298.2016.06.045.
CHEN Xiulong, JIANG Deyu, CHEN Linlin, et al. Kinematics performance analysis and optimal design of redundant actuation parallel mechanism[J/OL]. Transactions of the Chinese Society for Agricultural Machinery, 2016, 47(6): 340-347.(in Chinese)
4ZHANG D, XU Y, YAO J, et al. Kinematics, dynamics and stiffness analysis of a novel 3-DOF kinematically/actuation redundant planar parallel mechanism[J]. Mechanism and Machine Theory, 2017, 116: 203-219.
5汪满新, 刘海涛, 黄田,等. 3-S(P)R并联机构运动学性能评价[J]. 机械工程学报, 2017,53(5): 108-115.
WANG Manxin, LIU Haitao, HUANG Tian, et al. Kinematics performance evaluation of a 3-SPR parallel manipulator[J]. Journal of Mechanical Engineering, 2017,53(5): 108-115.(in Chinese)
6YAO J, GU W, FENG Z, et al. Dynamic analysis and driving force optimization of a 5-DOF parallel manipulator with redundant actuation[J]. Robotics and Computer-Integrated Manufacturing, 2017, 48: 51-58.
7WU J, WANG J, WANG L, et al. Study on the stiffness of a 5-DOF hybrid machine tool with actuation redundancy[J]. Mechanism and Machine Theory, 2009, 44(2): 289-305.
8LIU H, HUANG T, MEI J, et al. Kinematic design of a 5-DOF hybrid robot with large workspace/Limb-Stroke ratio[J]. ASME Journal of Mechanical Design, 2007, 129(5): 530-537.
9WU J, WANG J, WANG L, et al. Dynamic model and force control of the redundantly actuated parallel manipulator of a 5-DOF hybrid machine tool[J]. Robotica, 2009, 27(1): 59-65.
10OLAZAGOITIA J L, SL P, WYATT S. New PKM Tricept T9000 and its application to flexible manufacturing at aerospace industry[C]. SAE Technical Papers 07ATC-94, 2007.
11ZHANG J, ZHAO Y, JIN Y. Kinetostatic-model-based stiffness analysis of Exechon PKM[J]. Robotics and Computer-Integrated Manufacturing, 2016, 37: 208-220.
12LI M, HUANG T, MEI J, et al. Dynamic formulation and performance comparison of the 3-DOF modules of two reconfigurable PKM-the Tricept and the TriVariant[J]. ASME Journal of Mechanical Design, 2005, 127(6): 1129-1136.
13CHEN X, LIU X J, XIE F G, et al. A comparison study on motion/force transmissibility of two typical 3-DOF Parallel manipulators: the Sprint Z3 and A3 tool heads[J]. International Journal of Advanced Robotic Systems, 2014, 11(1):1-10.
14XU Y, ZHANG D, YAO J, et al. Type synthesis of the 2R1T parallel mechanism with two continuous rotational axes and study on the principle of its motion decoupling[J]. Mechanism and Machine Theory, 2017, 108: 27-40.
15李秦川, 柴馨雪, 陈巧红,等. 2-UPR-SPR并联机构转轴分析[J]. 机械工程学报, 2013, 49(21):62-69.
LI Qinchuan, CHAI Xinxue, CHEN Qiaohong, et al. Analysis of rotational axes of 2-UPR-SPR parallel mechanism[J]. Journal of Mechanical Engineering, 2013, 49(21): 62-69.(in Chinese)
16张东胜, 许允斗, 姚建涛,等. 五自由度混联机器人逆动力学分析[J/OL]. 农业机械学报, 2017,48(9):384-390. http:∥www.j-csam.org/jcsam/ch/reader/view_abstract.aspx?flag=1&file_no=20170949&journal_id=jcsam. DOI:10.6041/j.issn.1000-1298.2017.09.049.
ZHANG Dongsheng, XU Yundou, YAO Jiantao, et al. Inverse dynamic analysis of a novel 5-DOF hybrid manipulator [J/OL]. Transactions of the Chinese Society for Agricultural Machinery, 2017, 48(9):384-390.(in Chinese)
17解则晓, 商大伟, 任凭. 基于Lamé曲线的Delta并联机器人拾放操作轨迹的优化与试验验证[J]. 机械工程学报, 2015, 51(1):52-59.
XIE Zexiao, SHANG Dawei, REN Ping. Optimization and experimental verification of pick-and place trajectory for a Delta parallel robot based on Lamé curves[J]. Journal of Mechanical Engineering, 2015, 51(1):52-59.(in Chinese)
18WANG P, HUO X, WANG Z. Topology design and kinematic optimization of cyclical 5-DOF parallel manipulator with proper constrained limb[J]. Advanced Robotics, 2017, 31(4): 204-219.
19朱大昌, 冯文结, 安梓铭. 整体式平面三自由度全柔顺并联机构构型拓扑优化设计[J]. 机械工程学报, 2015, 51(5):30-36.
ZHU Dachang, FENG Wenjie, AN Ziming. Topology optimization integrated design of 3-DOF fully compliant planar parallel manipulator[J].Journal of Mechanical Engineering, 2015, 51(5):30-36.(in Chinese)
20WANG Hao, ZHANG Linsong, CHEN Genliang, et al. Parameter optimization of heavy-load parallel manipulator by introducing stiffness distribution evaluation index[J]. Mechanism and Machine Theory, 2017, 108: 244-259.
21XIE Fugui, LIU Xinjun, WANG Jinsong, et al. Kinematic optimization of a five degrees-of-freedom spatial parallel mechanism with large orientational workspace[J]. Journal of Mechanisms and Robotics, 2017, 9(5): 051005.
22LIU X J, WANG L P, XIE F, et al. Design of a three-axis articulated tool head with parallel kinematics achieving desired motion/force transmission characteristics[J]. Journal of Manufacturing Science and Engineering, 2010, 132(2): 021009.
23郭希娟, 耿清甲. 串联机器人加速度性能指标分析[J]. 机械工程学报, 2008, 44(9):56-60.
GUO Xijuan, GENG Qingjia. Analysis for acceleration performance indices of serial robots[J]. Chinese Journal of Mechanical Engineering, 2008, 44(9): 56-60. (in Chinese)
24TANG Tengfei, ZHANG Jun. Conceptual design and comparative stiffness analysis of an Exechon-like parallel kinematic machine with lockable spherical joints[J]. International Journal of Advanced Robotic Systems, 2017, 14(4): 1-13.
猜你喜欢
微特电机(2022年9期)2022-10-15
中学生数理化·中考版(2021年10期)2021-11-22
上海大中型电机(2021年1期)2021-06-09
石油沥青(2021年1期)2021-04-13
空间科学学报(2020年4期)2020-04-22
电子制作(2019年23期)2019-02-23
消费导刊(2018年8期)2018-05-25
考试周刊(2017年7期)2017-02-06
电脑爱好者(2016年23期)2017-01-05
燕山大学学报(2015年4期)2015-12-25