基于Simulink的机电伺服系统负载特性仿真方法
2018-04-21 03:43高健杨金鹏陈鹏刘春庆姜玉峰
中国设备工程 2018年7期
高健,杨金鹏,陈鹏,刘春庆,姜玉峰
(北京精密机电控制设备研究所,北京 100076)
目前,许多航天飞行器在飞行过程中采用空气舵以控制姿态与轨迹。传统的型号多使用液压伺服系统作为空气舵的执行机构,近年来,随着机电伺服技术的发展,中小功率机电伺服系统因其具有比功率大、成本相对较低、维护简单等优点,逐渐替代了液压伺服系统。
在实际应用中,需要机电伺服系统的负载特性进行研究与分析,为系统设计、控制参数的优化和性能调试提供依据。本文对航天用机电伺服系统的工作原理进行阐述,并建立数学模型,在Simulink中建立仿真模型。然后使用模拟负载测试系统的试验数据对仿真模型的负载特性参数进行优化,进而对各种负载条件下的机电伺服系统特性完成仿真分析。
1 机电伺服系统工作原理
目前该机电伺服系统采用较为成熟的三环控制策略,其基本工作原理为:上位机将控制信号通过1553B数字总线送至伺服控制驱动器,伺服控制驱动器将摆角指令解算为舵机行程,同时采集舵机内部的位移传感器信号和永磁同步伺服电机状态数据,运行闭环控制算法,按照指令要求控制舵机摆动空气舵,其原理见图1。图中,负载力矩梯度的大小和符号会使舵系统回路传递函数发生很大的变化,甚至出现正根,即舵系统发生了静不稳定状态,因此研究机电伺服系统的负载特性问题需分析负载力矩梯度对整个机电伺服系统性能的影响。
2 仿真模型
2.1 物理模型
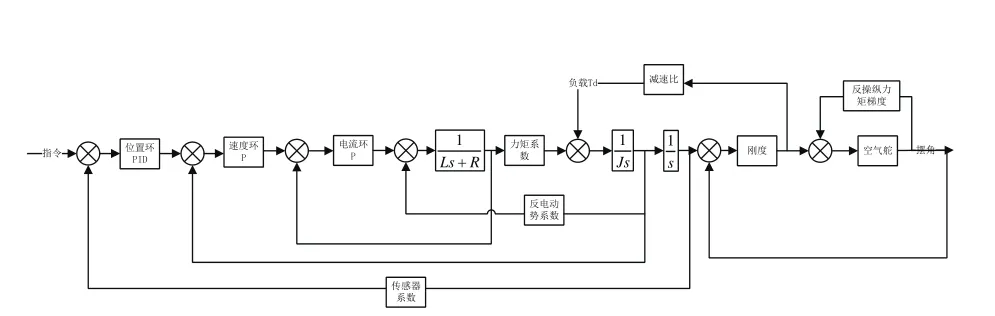
图1 伺服系统工作原理
舵机机电伺服系统采用的主要驱动部件是永磁同步电机,采用空间矢量控制算法,即SVPWM。其中其理想控制状态下, id≡ 0,此时其电枢电压平衡方程及电磁转矩方程同直流电机是完全一样的,只是电枢电流ia换成了交轴电流分量。为简化建模及仿真过程,在本机电伺服系统建模过程中,将永磁同步电机等效为直流电机。
空气舵机电伺服系统的物理模型如图2所示。

图2 物理模型
(1)电压平衡方程

(2)伺服电机转矩平衡公式

(3)负载力矩平衡公式

(4)传递函数
经拉氏变换后,通过以上方程可以得出最终舵面摆角和指令之间的传递函数如下。

图3 原理框图

Ra-电机电枢电阻; La-电机电枢电感; Jm_电机转子转动惯量(含齿轮箱丝杠等); KL_折合到丝杠轴上刚度; BL_舵轴转动阻尼系数;Mθ_负载力矩梯度; Kt_电机力矩系数; Ke_反电动势系数;n_减速比; JL_负载转动惯量。
2.2 仿真模型
模型中位置环采集电机旋转编码器信息以闭环反馈,负载环节在闭环控制外,因此负载作用到永磁同步电机上的只有惯量和扭矩。在进行建模仿真时,主要基于以下原则。
首先,确定控制参数,主要是根据从指令到舵面实际摆角的传递函数的开环bode图,进行参数匹配,然后运用Simulink中的线性化工具,得出伺服控制回路(带载)传递函数的开环bode图。
然后,进行暂态特性测试,判断超调量大小,并适当调整PID控制参数。
最后,进行动态性能测试,处理角位移的频率特性测试结果,确认是否满足指标要求。
2.3 参数修正
为提高模型的仿真结果的准确性,首先用模拟负载测试系统实测结果对仿真模型中的关键参数进行修正。
模拟负载测试系统采用弹性钢板加载方式,底部控制舵机构舵面转轴通过转接工装与试验台主轴固连,试验台主轴经过联轴器与扭矩转角传感器连接后与弹性钢板连接。底部控制舵机构舵面转动过程带动主轴等幅度摆动,主轴转角使弹性钢板发生弹性变形,实现力矩加载;扭矩传感器和角度传感器的输出信号,经板卡采集后输入测试仪,实现实时的信号测量和记录。
按照理论分析,影响系统动态性能的重要参数为转动惯量和系统的综合刚度。这两个参数均能影响系统的频宽。为避免机械谐振,提高系统的固有频率,一般通过提高系统的综合刚度和降低舵轴上的转动惯量来考虑。一般转动惯量可以定量计算,但系统的综合刚度由于存在间隙、多传动环节等非线性因素,较难计算,因此结合实际试验数据,对模型中系统的综合刚度进行参数修正。另外,根据对机构的认识,当舵轴上存在较大的负载力矩时,需在仿真模型中对库伦摩擦力进行调整。因为当负载力矩增大时,舵轴上的摩擦力矩也会相应增大。
参数修正后,在模型中对机电伺服系统分别在零位和偏置20°条件下进行1°幅值频率特性仿真。通过对零位的仿真和实测数据对比,可知实际数据和仿真结果在零位时,有无弹性负载,对于系统的频率特性影响较小。
在正偏20°无弹性负载和有弹性负载条件下,仿真模型频率特性结果曲线均位于实测数据包络范围内。其幅频特性与实测数据在谐振峰附近有一定差异,主要体现在幅值大小(w=200rad/s之前,幅值最大相差2dB,但是在w=200rad/s处,幅值相差较大,原因是作为Simulink仿真模型,虽然含有部分非线性环节,但其建模仍是线性化建模,真实系统的高阶非线性很难用本仿真模型来体现,所以在高频段,与实测系统存有差异)。但是幅频特性变化趋势一致,反映了偏置条件下,力臂减小,等效负载惯量相对增大,谐振峰提前,符合理论预期。
2.4 负载特性仿真
模型参数修正完成后,按照实际的负载情况,进行位置特性、暂态特性和频率特性仿真。仿真结果表明,受系统刚度影响,在位置特性仿真时,负载力矩梯度的符号对位置特性有影响,符号为负时相对其符号为正时,舵面摆角会偏大;在暂态特性时,负载力矩梯度符号为负时的超调量相对变大;在频率特性时,负载力矩梯度符号为负时,在中高频相位相对滞后,幅值相有一定程度衰减。
3 结语
利用Simulink工具,以航天机电伺服系统为研究对象,进行了仿真,并结合模拟负载测试系统的试验结果对模型进行了修正,得到了负载特性进行了初步辨识,后续将依据仿真结果优化机电伺服系统设计。
参考文献:
[1]吕飞,郑鹍鹏.舵机反操纵对于自动驾驶仪稳定性德影响[J].四川兵工学报, 2013(2): 113-116.
[2]王明彦,郭犇,王金梁.惯量和刚度对电动负载模拟器频宽影响的分析[J].电机与控制学报,2004,8(1):71-74.
[3]高钟毓. 机电控制工程[M].北京: 清华大学出版社, 2011.
猜你喜欢
农业工程学报(2022年13期)2022-10-09
灌溉排水学报(2022年6期)2022-07-13
北京航空航天大学学报(2022年6期)2022-07-02
导弹与航天运载技术(2022年2期)2022-05-09
水泥工程(2020年4期)2020-12-18
制造技术与机床(2017年3期)2017-06-23
中国教育技术装备(2016年22期)2017-03-02
北京航空航天大学学报(2016年4期)2016-02-27
中国电子科学研究院学报(2015年1期)2015-06-07
现代电子技术(2015年1期)2015-04-13