四轴飞行器控制系统的研究
2018-04-27 11:51王增彩徐立刘旗周继民石业成大连理工大学城市学院
数码世界 2018年4期
王增彩 徐立 刘旗 周继民 石业成 大连理工大学城市学院
引言
四轴飞行器与其他飞行器相比,其优点在于构造简单、飞行灵活较传统的直升机更容易接近任务目标;更重要的是,四轴飞行器的研究涉及到众多领域的高、精、尖技术,如:空气动力学、自动控制、自主导航、传感技术等等;目前随着传感器技术和计算机技术的不断发展,四轴飞行器也为这些领域提供了一个综合的研究平台。因此,无论是科学研究,还是综合应用四轴飞行器的研究都有着极高的研究价值。
1 四轴飞行器的控制原理
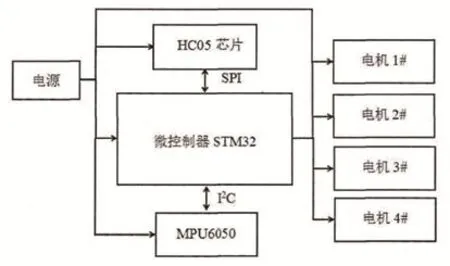
图1. 1四轴飞行器基本结构图。。
四轴飞行器属于利用旋翼来提供上升力的飞行器的一种,拥有四个螺旋奖,这四个螺旋桨对称的分布在四轴飞行器前、后、左、右的四个方位,其机械结构非常简单,要控制四轴飞行器改变飞行的姿态,只需要调整两对螺旋桨的转速就可以了。
2 姿态表示及姿态解算
飞行器的姿态采用欧拉角表示方法,即为翻滚角ρ、倾仰角e和偏航角γ。欧拉角即飞行器机体对于机体坐标系的X、Y、Z轴的旋转角度,分别用滚转角、仰俯角和偏航角进行表示。根据欧拉旋转定理,通过三次旋转即可使得机体坐标系旋转到与地理坐标系重合或者飞行器平衡姿态位置,三次坐标变换的旋转矩阵的乘积即是欧拉角姿态矩阵。假设全局坐标系(地理坐标系)XY-Z固定于地面保持静止,飞行器坐标系x-y-z初始时与全局坐标系重合。
为了得到当前飞行器的飞行姿态,在应用中,采用互补的方法对三个轴的数据分别进行融合,算法中,加速度和角速度测量的数据作为输入;得到的输出为相对于地球坐标的倾角和角速度。以得到正确的角度值,互补融合算法原理如图1.2所示:。。
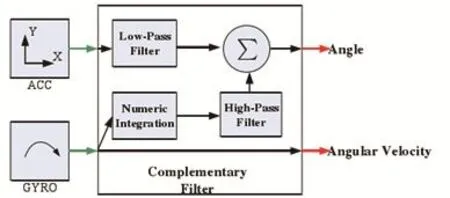
图2. 1融合算法
3 四轴飞行器的硬件电路设计
四轴飞行器的硬件电路设计主要包含:微控制模块电路设计、传感器模块电路设计、蓝牙模块电路设计、电源模块电路设计、电源电压检测模块电路设计等。微控制器。用STM32F103C8T6芯片,传感器模块选用整合了三轴陀螺与三轴加速器的新型MEMS传感器MPU6050,蓝牙模块选用了能够与手机蓝牙相连接的HC05芯片。电源模块选用了一款性价比比较高的芯片SP6205。电源电压检测模块则设计了一个ADC电路。
4 四轴飞行器软件的设计。
遥控器是一种用来远程控制某个装置的器件。四轴飞行器的遥控器就是用来给四轴飞行器传递指令,指示四轴飞行器应该。取什么样的动作的器件。四轴飞行器的遥控器使用手机来代替,所以本次设计借助了eclipse软件对四轴飞行器的遥控APP的手机应用进行编写,采用JAVA语言编程。APP界面上设有油门滑块,偏航滑块用来控制四轴飞行器螺旋奖转速的快慢和偏航方向.
5 总结
本文主要介绍了飞行器完成的结果,已初步完成了基本的飞行动作,达到预期的标准;同时对系统中姿态解算算法进行了分析,另外文中还对系统的设计缺陷进行了分析,许多方面还有待进一步研究和改进。
[1]刘杰.四轴飞行器研究与设计[D].南京:南京邮电大学,2013.
[2]聂博文.微小型四旋翼飞行器的研究现状与关键技术[A].电光与控制,2007.
[3]杨庆华,宋召青.四旋翼飞行器的建模控制与仿真[J].海军工程学院学报,2009.。。
[4]陈振兴.基于STM32的微型四轴飞行器研究与设计[D].河北工业大学硕士学位论文,2013.
[5]张浩.四旋翼飞行器航姿测量系统的数据融合方法[J].兵工自动化,2013.
猜你喜欢
导航定位学报(2022年2期)2022-04-11
北京航空航天大学学报(2021年9期)2021-11-02
小哥白尼(军事科学)(2021年4期)2021-07-28
军民两用技术与产品(2021年9期)2021-03-09
电子制作(2019年22期)2020-01-14
电子制作(2019年13期)2020-01-14
电子制作(2019年16期)2019-09-27
电子制作(2019年9期)2019-05-30
电子制作(2019年23期)2019-02-23
数学大世界(2018年1期)2018-04-12