一种用于狭窄空间的多功能拾取爪的设计
2018-05-07 09:32刘斌
电力安全技术 2018年3期
刘 斌
(国网安徽省电力公司阜阳供电公司,安徽 阜阳 236000)
0 引言
目前,在现场狭窄空间拆装小零件,如在环网柜、高压分支箱电缆终端头进行螺帽、垫片的拆装工作时,对细小零件的安装与拆卸都比较困难。特别是在电缆分支箱肘型终端头工作时,由于肘型终端头内部空间狭小,在拆装螺帽与垫片等时,一般是用起子或钢丝类的工具将其缓慢掏出或安装。这种方法很容易导致螺帽与垫片掉落到其他空间,并且难以拾取,给设备的安全运行带来一定的隐患。同时,如果小零件掉落或放置后,带绝缘手套工作时难以拾取;如果取下绝缘手套,则会带来一定的安全风险,在带电作业过程中就出现过因戴绝缘手套无法拾取掉落的螺帽部件而擅自取下绝缘手套造成触电的事故。
另外,在工作中还需要携带较多的检修工具,容易造成遗漏,给现场工作带来不便。
为解决以上问题,某供电公司研究了一种简便、快捷的多功能检修工具;将其应用到现场作业时,不仅可以在狭小空间进行操作,还极大缩短了工作时间,提高了作业效率,保障作业人员的人身安全,确保了设备的安全可靠运行。
1 结构设计
针对在现场狭小空间中拆装螺帽、垫片等细小零件无专用的工具,带绝缘手套难以拾取细小部件的问题,在考虑现场条件与使用的便捷性后,设计了一种简易、可靠且多功能的检修拾取爪。其简化结构示意如图1所示。
图2为活动支撑臂与拾取爪和主杆连接部位结构图。
拾取爪与滑动环连接部位结构和附杆结构如图3,4所示。
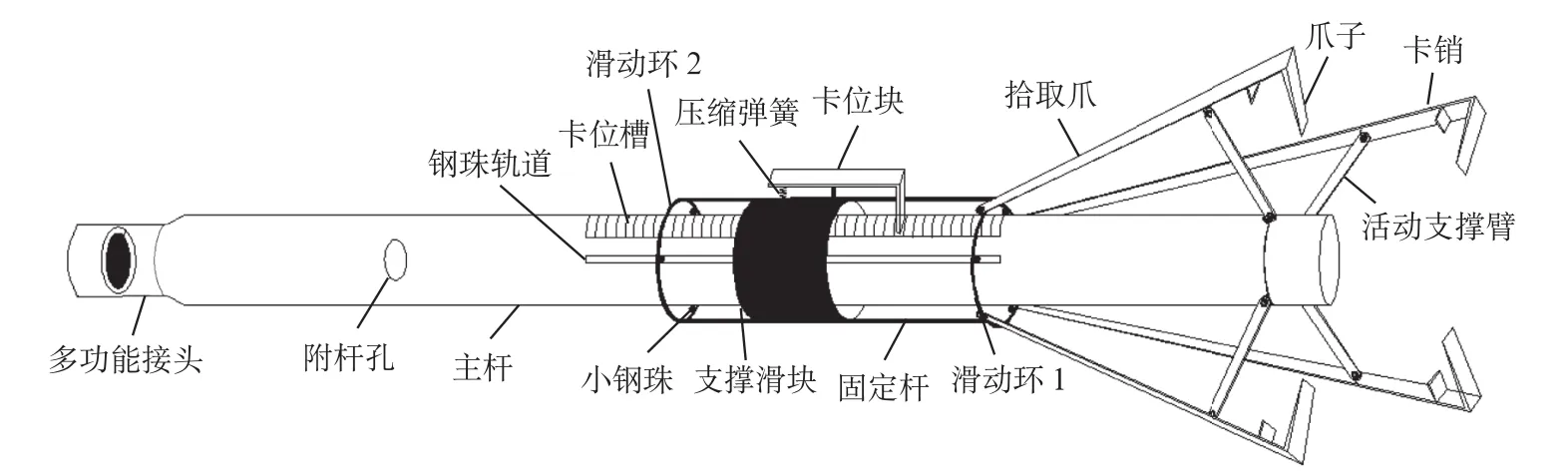
图1 拾取爪简化结构示意
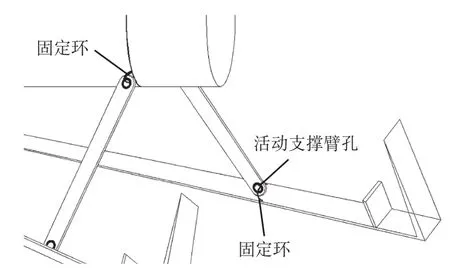
图2 活动支撑臂、拾取爪和主杆连接部位结构示意
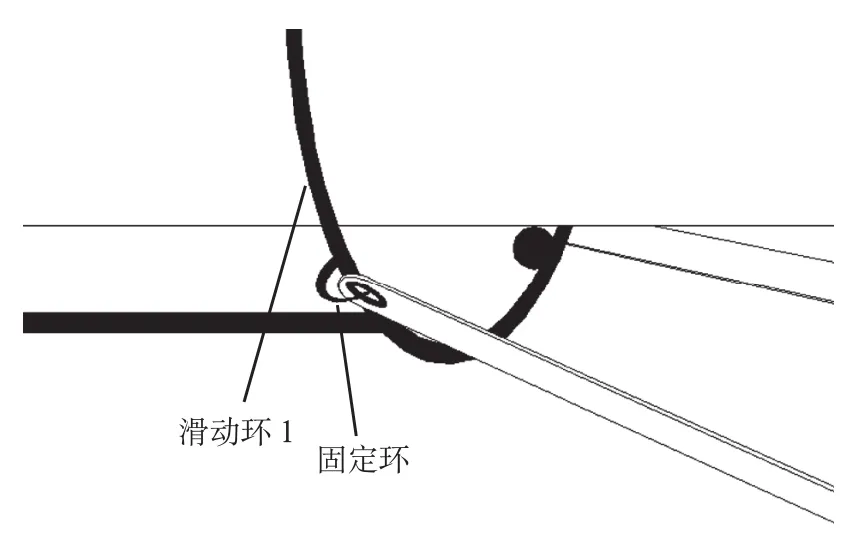
图3 拾取爪与滑动环连接部位结构示意

图4 附杆结构示意
以上设计的拾取爪及各部件均达到一定的机械强度、硬度以及力矩要求,材质为不锈钢,耐锈蚀。其爪子的宽度与厚度是制造工艺的难点之处。该工具为整体结构,具有灵活、不卡涩、可靠、连接牢固且携带方便的优点。
2 拾取爪工作原理分析
由图1—3可知,滑动环1和2直径比主杆直径稍大,并通过固定杆与支撑滑块相连,卡位块通过压缩弹簧固定在支撑滑块上。拾取爪通过滑动环上的固定环与滑动环相连,并可以在滑动环上灵活转动。活动支撑臂通过固定环和与主杆和拾取爪相连,起支撑作用并可以转动。6个小钢珠分别置于滑动环1和2上,可以沿着钢珠轨道运动。
当需要在狭窄空间装拆或拾取细小零部件(如螺帽、垫片等)时,先按住压缩弹簧处的卡位块,使卡位块从卡位槽中离开,同时推动支撑滑块向拾取爪方向移动,促使拾取爪开口逐渐增大至适合位置;再将拾取爪子放在需要被装拆或拾取的细小零部件(如螺帽、垫片等)处;最后将支撑滑块向背离拾取爪方向移动,从而夹紧细小零部件,将其放置于需要的位置处。由于卡销起卡位作用,所以被拾取物不会从爪子上掉落。同时,由于小钢珠是在预定的钢珠轨道内移动的,因此移动过程中不会卡涩,拾取爪也不会在主杆上转动。
另外,当未对卡位块用力时,卡位块就会卡入到卡位槽中,使支撑滑块、滑动环1和2以及拾取爪保持在固定位置不动。
当需要松紧螺帽时,可以利用多功能接头接上不同型号的扳手套筒,再将图4的附杆插入到主杆的附杆孔内,用力紧固螺帽。使用该多功能检修拾取爪,能快速、方便地在狭小空间对细小零件进行拆装与拾取,提高作业效率,并防止细小零部件掉落在带电间隔内,保障人身与设备安全。
3 加工制造与特性分析
根据设计图纸进行该器具的加工生产时,加工的关键部位为轨道及活动支撑臂、爪子等。通过不断的改进与三维动态设计,最终完成了该新型拾取爪的制作,并在实验室中对机构的机械特性、灵活性与可操作性进行了试验验证,如表1所示。
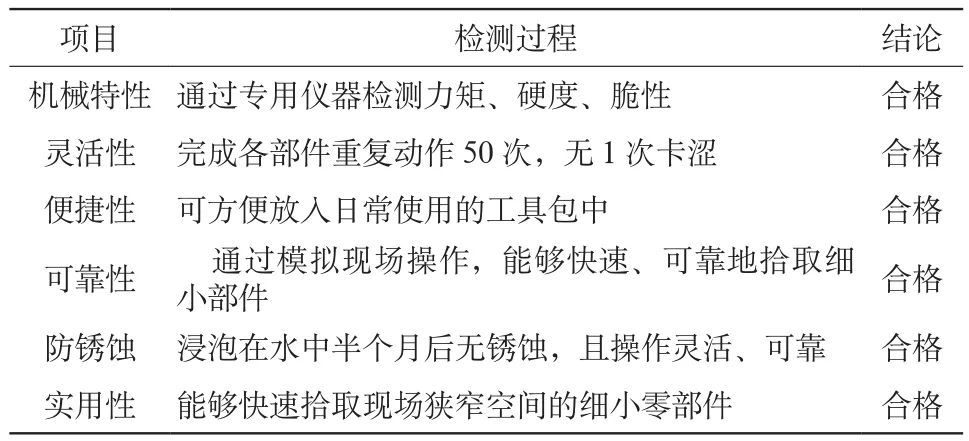
表1 拾取爪各特性试验结果
该工具已通过该供电公司的评审,并向国家专利局申请了实用新型和发明专利,已获得受理。
该工具不仅可应用于环网柜、高压分支箱电缆终端头狭小空间,还可应用于配电带电作业中,无需取下绝缘手套即可快速拾取细小零部件。另外,该工具还可应用于其他任何需要拾取、拆装细小零部件的地方,具有灵活、可靠的优点。
由于该拾取爪较小,不能用于较大零部件及超过750 g的物体,也不能用爪子用力敲击物体,并且需要对固定环进行运定期维护保养。
4 结论
从新型拾取爪的理论分析及试验结果可知,该器具的机械强度和其他性能均满足设计与安全要求,能在现场狭窄空间对细小零部件进行快速地拾取,提高工作效率;还能防止细小零部件的掉落,保证设备的安全可靠运行;同时解决了带电作业携带绝缘手套难以拾取细小零件的问题,提高了作业人员和设备的安全性。
参考文献:
1 朱宏峰,谢海滨.一起高压电缆终端炸裂事故分析[J].电力安全技术,2011,13(2):24-26.
猜你喜欢
家教世界(2022年1期)2022-11-21
家教世界·创新阅读(2022年1期)2022-02-19
意林·少年版(2021年22期)2021-12-09
民用飞机设计与研究(2021年3期)2021-10-19
陕西农业科学(2021年12期)2021-02-21
实验室研究与探索(2020年6期)2020-08-25
山东林业科技(2019年2期)2019-06-03
传媒评论(2018年3期)2018-06-21
NBA特刊(2018年7期)2018-06-08
NBA特刊(2017年8期)2017-06-05