
一种航向控制设计在直升机的应用
2018-05-10 09:00明星
机械研究与应用 2018年2期
明 星
(中国直升机设计研究所, 江西 景德镇 333001)
0 引 言
关于实现直升机自动稳定系统所需要的系统设备形式的研究工作,国外开展的比我们早些,我国也于20世纪70年代先后在直-5、直8飞机上进行了直升机驾驶仪的研制工作[1-2]。近几十来随着随直升机性能要求的日益提高,其飞行控制技术得到了迅速发展,飞控系统已从传统的模拟式增稳装置、自动驾驶仪发展到今天的多余度电传/光传操纵系统[3]。直升机的结构特点和飞行特点决定了航向姿态系统的工作环境严酷、工作条件恶劣,振动强度大、温度变化快[4]。从应用实践总结得出,航向姿态会出现虚假信号,这种虚假信号影响了航向姿态稳定性,降低了直升机的航向操纵性能,严重影响了飞行员的操纵感受和飞行的出勤率。笔者提出了一种新的航向保持功能的控制方法,该方法结构简单,针对非主观因素引起的微动开关受力断开航向稳定模态精度差的问题起到了很好的控制作用,经过试飞和试验验证,该方法有效可行,并在此基础上改进了航向控制系统设计方案,最后对此设计的可行性进行了验证。
1 航向系统体系结构
对直升机的航向进行闭环控制,就需要相应的硬件传感器。如图1所示在航向通道中来自速率陀螺的信号去控制一个有限行程的串联舵机,该舵机再对尾旋翼加必要操纵运动。接受来陀螺罗盘测量来的航向角,航向角速率信号,去控制一个和脚蹬并联作用的全行程的并联舵机。航向保持已接通,脚蹬阻尼器便旁路,并联舵机便产生对尾旋翼的控制作用[2]。微动开关装在脚蹬上,驾驶员可以用脚蹬下或者松开脚蹬断开或者重新接通系统,由于硬反馈的存在,所以直升机机动之后,系统跟踪在新的航向。
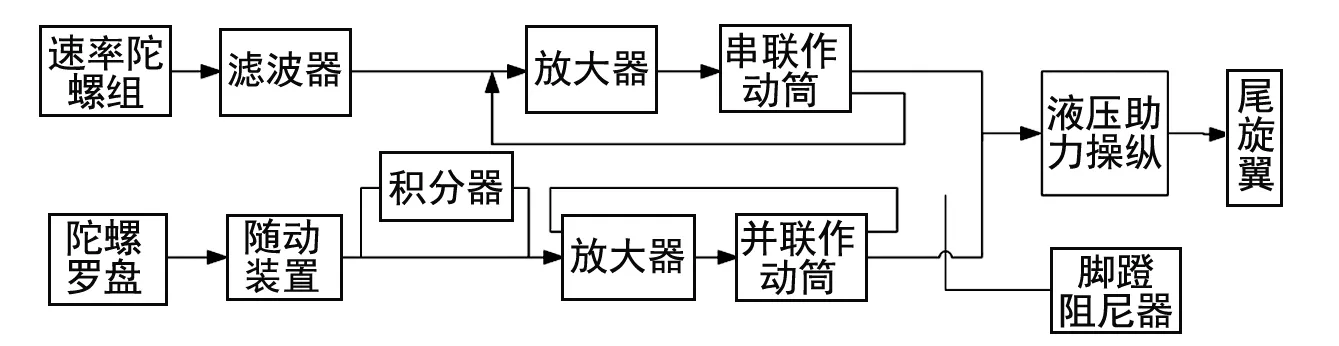
图1 航向稳定保持系统
2 航向保持模态
航向姿态保持一般具有如图2所示的机构。姿态保持适用于全包线飞行,在稳定飞行状态下,一般要求姿态保持精度±1°[1,5]。
以典型的角控制比例式自动驾驶仪为例,对直升机三轴具有相同的控制规律,为尽量的减小航向角的稳定误差而不会产生严重震荡,还能缩短恢复初始状态的时间,增大KΨ的同时,比例式控制规律中引进角速度信号。苏制米-8自动驾驶仪,法制“小羚羊”、“海豚”等直升机选装的SFIM公司的AP-85、AP-155型自动驾驶仪都具有相同的控制规律如航向姿态的控制为[2]:
(1)


图2 航向保持模态一般结构
3 航向控制方案
航向通道处于是否处于航向保持模态,通过判别微动开关的状态来实现,微动开关的状态直接影响并联舵机是否产生作用使得执行机构带动尾桨运动。经典控制方式如图3所示。
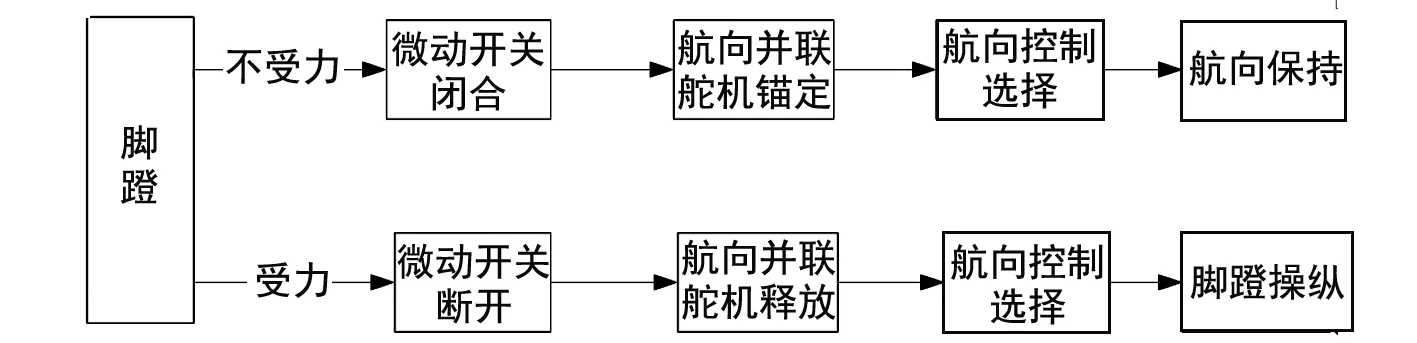
图3 传统的航向控制框图
航向通道控制策略是脚蹬受力微动开关断开航向并联舵机的离合器释放,达到一定时间后飞控计算机发出指令控制航向通道工作模式切换到脚蹬操纵,这种工作方使得短时间微动开关断开自动驾驶仪在航向保持但直升机操纵系统无响应。笔者提出的是一种对脚蹬短时受力微动开关断开这种虚假信号处理方法,航向状态控制方法如图4所示。通过飞控计算机采集到的微动开关状态,对微动开关信号进行判别后实现微动开关状态、航向并联舵机离合器状态和航向通道模态实时同步。飞控计算机控制策略为当采集到微动开关闭合时,飞控计算机发出指令自动驾驶仪工作在航向保持状态,航向并联舵机离合器处于锚定;当采集到微动开关闭断开时飞控计算机发出指令航向进入了脚蹬操纵,控制并联舵机离合器工作在释放状态,跟随航向操纵系统运动。

图4 优化的航向控制框图
在微动开关短时受力断开情况下,飞控系统继续工作在航向保持模态下,响应直升机的状态,实时实现航向通道控制。这种方法既能达到飞行员真实蹬脚蹬实现人工操纵的功能性能,又能解决了非主观因素微动开关断开,并联舵机不工作而飞控系统有输出引起的航向偏差大的问题。
4 试验结果
为验证文中提出的一种关于虚假信号处理方法对航向保持功能性能的影响,搭建了飞行控制系统地面试验台架进行验证。模拟空中飞行中航向保持功能接通,模拟空中飞行过程飞行员非主观原因短时蹬舵,安装于脚蹬下方的微动开关受力断开,观察经典航向控制基础上增加了预警信号处理的航向控制方法对航向通道控制精度的影响。试验中,微动开关受力断开时间设置不大于500 ms。
如图5,经典的航向控制策略微动开关断开状态对应并联舵机离合器处于释放状态,当处于断开状态的时间低于设定值200 ms航向通道一直处于航向保持,在这个过程中由于并联舵机伴随微动开关断开瞬时释放,未起到修正航向角的作用,保持精度在2°~4°范围内,图6为增加预处理的航向保持控制精度图。

图5 航向控制保持精度
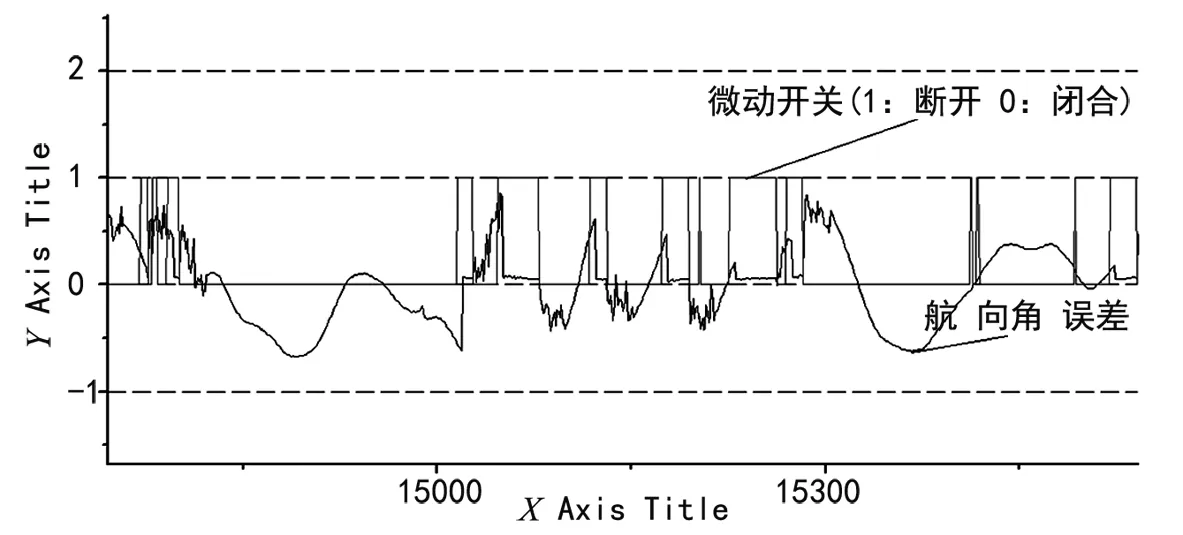
图6 增加预处理的航向保持控制精度
如图6所示当采集到微动开关断开,未超过预定时间200 ms时,飞控计算机发出指令航向通道处于保持状态并输出信号控制并联舵机离合器处于锚定,起到了修正航向角的作用,航向角误差在1°范围内。
5 结 语
航向控制通道是直升机基本的三轴之一,航向通道的保持精度对于直升机的特性和飞行员的操纵感受起着关键作用。对于由于非主观因素操纵脚蹬受力微动开关短时间内断开的情况,传统的航向控制方法会出现航向偏差大,姿态修正效果差的现象。文中设计的一种基于对微动开关断开信号的预处理办法,解决了传统控制策略对离合器释放航向角不修正的问题,明显地达到了提高航向角保持精度。文中提出的方案切实可行,确保了短时微动断开航向精度满足使用要求。
参考文献:
[1] 杨一栋.直升机飞行控制[M].北京:国防工业出版社,2011.
[2] 王昆玉.直升机飞行控制系统[M].北京:蓝天出版社,1991.
[3] 李林华.直升机飞行控制技术发展概述[J].直升机技术,2007,150(2):62-65.
[4] 刘冠军,徐 哲,邱 静.振动、测试与诊断[J].2008,28(3):256-258.
[5] 张明廉.飞行控制系统[M].北京:航空工业出版社,1994.
猜你喜欢
教练机(2022年4期)2022-03-13
现代电子技术(2022年2期)2022-02-13
军民两用技术与产品(2021年8期)2021-11-24
新生代·上半月(2019年6期)2019-09-10
中小企业管理与科技(2019年9期)2019-05-28
中国惯性技术学报(2018年4期)2018-11-08
中国自行车(2018年7期)2018-08-14
系统工程与电子技术(2016年11期)2016-11-11
电子设计工程(2015年6期)2015-02-27
汽车科技(2014年6期)2014-03-11
