
基于速度修正模型的车辆行驶跑偏量误差分析
2018-05-14 19:44赵显新李明忠周兴林李俊
中国测试 2018年2期
赵显新 李明忠 周兴林 李俊


摘要:为实现车辆行驶跑偏量的高精度实时测量,针对测量误差大、重复性低的问题,运用GPS-RTK(卫星实时差分定位)技术进行车辆行驶跑偏量测量,将移动站接收机置于待测车辆上实时接收车辆位置信息,通过坐标转换软件转化为平面坐标计算跑偏量,同时建立车辆速度波动误差修正模型,将修正后的结果与传统陀螺仪检测结果进行对比。结果表明:车速的波动是导致车辆行驶跑偏量测量误差大、重复性低的主要因素,通过车辆速度波动修正模型修正后的百米跑偏量结果误差<5cm,且离散程度明显减小,提高检测的可重复性,实现车辆行驶跑偏量的高精度实时检测。
关键词:车辆工程;车辆行驶跑偏;卫星实时差分定位;速度修正模型;误差分析
文献标志码:A
文章编号:1674-5124(2018)02-0016-04
0引言
GB 7258-2012《机动车运行安全技术条件》中第6.7条对车辆行驶跑偏给出了定性的规定:机动车在平坦、硬实、干燥和清洁的道路上行驶不应跑偏,其方向盘(或方向把)不应有摆振、路感不灵或其他异常现象。而在即将修订的版本中,GB 7258-2012将对车辆的行驶跑偏量给出定量的规定,因此对车辆行驶跑偏量检测的精度和重复性要求极高。
目前车辆行驶跑偏量检测的方法相对较多,常见的有机器视觉、光纤传感器、激光扫描和测距、GPS检测法和传统的陀螺仪检测,但是由于CCD相机标定复杂,光纤传感器的安装和维护比较困难,激光检测法还处于理论研究阶段,并且这5种方法都不能实现实时检测。广泛使用的主要是GPS检测法和陀螺仪,而单纯的GPS测量误差可达5~10m,陀螺仪安装十分复杂,不适合流水线式检测。在已有的GPS检测法的基础上进行改进,提出RTK(real timekinematic)检测方法,该方法具有安装维护方便、检测精度高等优点,且受环境影响小,可实现车辆行驶跑偏量的全天候高精度流水线式实时检测。
由于采用GPS-RTK技术检测车辆行驶跑偏对试验精度要求较高,采样频率高达20hz,文中针对卫星实时差分定位技术测量结果误差大、重复性低的问题,提出了控制该误差的方法。
1车辆跑偏检测原理及方法
1.1GPS-RTK系统的基本原理
GPS-RTK系统主要由基准站和移动站两部分组成,基准站架设在测试道路旁的固定位置,基准站接收机通过输入一个高精度的已知坐标值,完成基准站接收机模式初始化和定位解算,基准站接收机在完成定位解算后,会根据这个已知坐标值实时解算出伪距修正量、载波修正量、坐标修正量的差分改正数,并通过串口输出差分改正数,移动站主机内置电台接收到所述差分改正数,并发送到移动站主机,移动站主机安装在被测车辆上,实时进行移动站主机的位置、速度和时间解算,在接收到基准站接收机发送的差分改正数后,实时对移动站主机的位置、速度和时间解算结果进行修正,以达到高精度相对于基准站的位置差分,获得高精度移动站主机坐标。在40km范围内,卫星差分定位技术的精度可以达到厘米级。
1.2车辆行驶跑偏检测方法
GPS-RTK系统检测方法如图1所示,首先在检测路段边架设RTK基准站及基准站电台,当被测车辆进入到待测区时,将移动站接收机固定在被测车辆上,并将便携式计算机以及无线AP放置在待测车辆内,启动工作电源,等待1-2min让GPS接收机锁定卫星,保证至少能够接收到5-12颗卫星信号以确保检测的顺利完成。被测车辆在测试准备区沿道路中心线加速到待测速度(待测速度参考国家标准),进入跑偏测试区后驾驶员不对方向盘施加任何外力让车辆保持速度自由行驶至测试区终点。便携式计算机实时接收移动站采集的车辆行驶轨迹点。计算机通过分析车輛各轨迹点处的速度、位置和方向等信息,对数据进行计算,得到车辆的百米行驶跑偏量和跑偏角并在显示器中显示出来,同时通过AP将数据传输到手持终端。
1.3跑偏量的计算
计算机接收到移动站发送的车辆各检测点的经纬度数据,通过坐标转换软件转换成平面坐标,记各检测点的位置坐标依次为(X0,Y0),(X1,Y1),(X2,Y2),…,(Xn,Yn),对应的车速依次为V0,V1,V2,…,Vn,对应的航向角为θ0,θ1,θ2,…,θ0,记GPS接收机采样频率为f,则接收信号的时间间隔为△T,被测车辆在△T内的跑偏角依次为△θ1=θ1-θ0,△θ2=θ2-θ1,…,△θn=θn-θn-1,被测车辆单位时间内的跑偏量△L由下式求得:
2误差分析
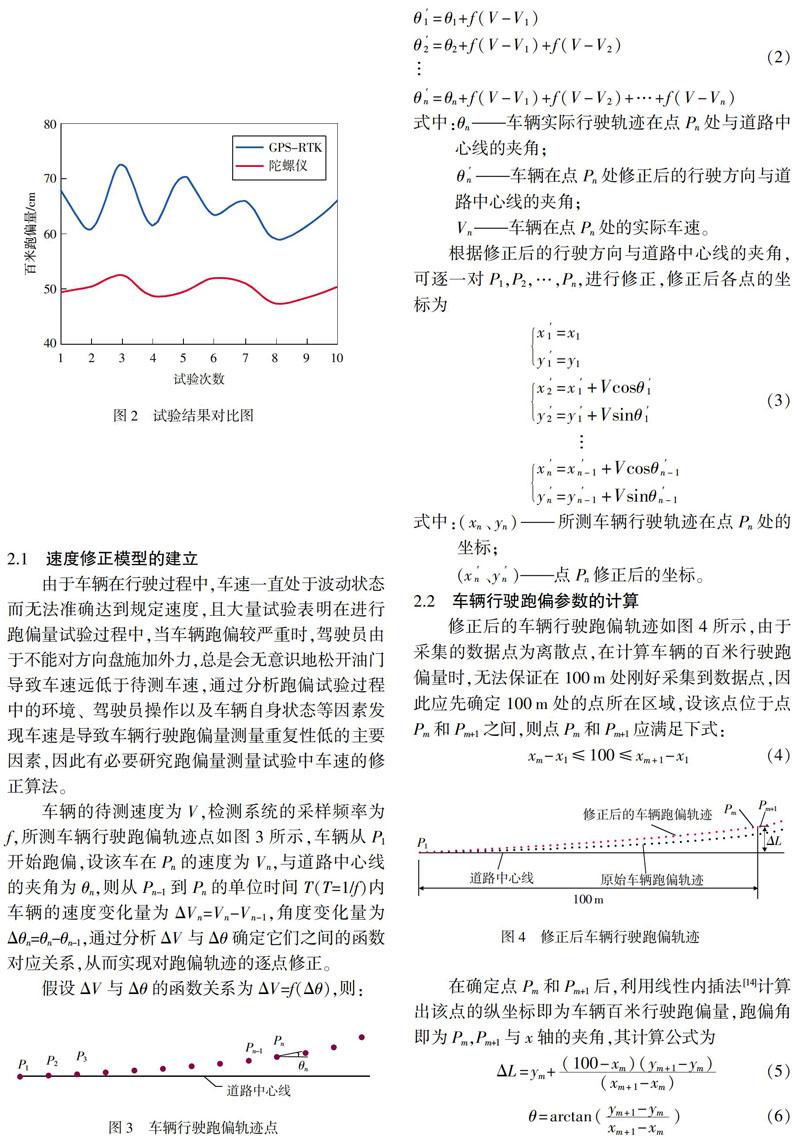
大量的试验表明同一车辆行驶跑偏的测量结果具有一定的离散性,存在一定的误差,以东风某一乘用车型为例,试验车上安装有GPS-RTK检测系统和陀螺仪。在某一路面平整且纵向坡度不超过0.10%、横向坡度不超过0.50%的汽车试验场地进行跑偏测试。
分别计算10组同向且车速为60km/h的百米跑偏量,测试结果对比如图2所示,GPS-RTK系统的跑偏量试验结果在50~70cm范围内波动,波动幅度最大可达11.5cm,而陀螺仪检测的试验结果集中在50cm上下,波动幅度很小,两种实验结果的对比分析,可发现GPS-RTK系统与陀螺仪的跑偏测试结果最大相差20.8cm,由此可见采用GPS-RTK技术进行车辆行驶跑偏量的检测存在测试结果误差大、重复性低等问题。
2.1速度修正模型的建立
由于车辆在行驶过程中,车速一直处于波动状态而无法准确达到规定速度,且大量试验表明在进行跑偏量试验过程中,当车辆跑偏较严重时,驾驶员由于不能对方向盘施加外力,总是会无意识地松开油门导致车速远低于待测车速,通过分析跑偏试验过程中的环境、驾驶员操作以及车辆自身状态等因素发现车速是导致车辆行驶跑偏量测量重复性低的主要因素,因此有必要研究跑偏量测量试验中车速的修正算法。
2.3修正算法验证试验
东风某一乘用车型以60km/h的速度在给定的跑偏量测量路段进行10次单向跑偏量测量试验,试验的过程中尽量保证相同的车型在不同次测量过程中的环境及操作人员相同,分别计算车速修正前后车辆行驶跑偏量,表1为速度修正前后的行驶跑偏量试验结果,由表可以看出,同种车型不同次测量所得车辆百米行驶跑偏量相差较大,与陀螺仪的检测结果相差可达20cm,经速度波动修正后的试验结果均方根误差由3.711减小为0.879,说明速度波动修正可以在一定程度上减少速度波动对检测结果的干扰,且相对于陀螺仪的测量误差在5cm以内。
由此证明,速度的波动是影响GPS-RTK系统跑偏量测试结果的重要因素。通过速度修正模型对车速进行修正后,大大减小了多次测量中车辆百米行驶跑偏量的离散程度,同时试验误差得到了有效控制,在一定程度上提高了跑偏量检测的可重复性。验证了该修正模型的有效性。
3结束语
1)采用GPS-RTK技术进行车辆行驶跑偏量的检测,克服了传统GPS定位技术检测精度低、误差大的问题,实现车辆行驶跑偏量的全天候高精度实时检测。
2)试验结果表明车速的波动是GPS-RTK系统中车辆行驶跑偏量结果误差的主要来源,同时也是导致测量重复性低的主要因素。
3)通过建立速度波动误差修正模型,减小了多次测量中车辆百米行驶跑偏量的离散程度,提高了跑偏量检测的可重复性。修正后的结果趋于稳定并且误差在5cm内。
猜你喜欢
物联网技术(2016年12期)2017-01-21
东方教育(2016年8期)2017-01-17
大学教育(2016年12期)2017-01-03
物理教学探讨(2016年11期)2016-12-19
大学教育(2016年11期)2016-11-16
科学与财富(2016年28期)2016-10-14
考试周刊(2016年76期)2016-10-09
大学教育(2016年7期)2016-07-27
考试周刊(2016年48期)2016-06-29
