Mirosot机器人带球避障研究
2018-05-15 08:31孙绍华王魁生雷娜
软件导刊 2018年4期
关键词:路径规划
孙绍华 王魁生 雷娜
摘 要:Mirosot机器人避障路径规划在不考虑球体运动的情况下,大多采用蚁群算法、神经网络算法以及策略配合等方法。Mirosot机器人在带球避障过程中应同时考虑球体受力和初始角度两个限制条件。在考虑球体运动的情况下,采用物理运动学受力分析方法建立球体受力运动路径轨迹方程,以解决机器人带球避障路径规划问题。
关键词:Mirosot;避障运动;路径规划;机器人足球
DOIDOI:10.11907/rjdk.172616
中圖分类号:TP301
文献标识码:A 文章编号:1672-7800(2018)004-0016-03
Abstract:The problem of a path planning of Mirosot robot avoiding obstacle, without considering the ball movement, most of the use of ant colony algorithm, neural network algorithm and methods of strategy cooperation,etc.to realize the path planning of robot obstacle avoidance.The purpose of this paper is to solve the problem of a path planning of Mirosot robot avoiding obstacle considering the ball movement.In this paper, the physical kinematic force analysis method is used to analyze and solve the problem, and the trajectory equation of the moving path of the ball is established.The results show that the Mirosot robot has two limiting conditions for ball force and initial angle selection in the process of avoiding obstacle with ball.It is concluded that the two constraints of the ball force and the initial angle should be taken into account in the process of a path planning of robot avoiding obstacle with ball.
It is common to apply ant colony optimization, neural network algorithm and strategy matching to avoid obstructions with the ball in Mirosot robot path planning. The two constraint conditions of sphere stress and initial angle should be considered in Microsot robot's path planning. This paper adopts the physical kinematic force analysis to establish the trajectory equation of the sphere movement path, which helps to solve the robot path planning avoiding obstructions with the ball.
Key Words:Mirosot; obstacle avoidance; path planning; robot soccer
0 引言
Mirosot机器人足球比赛中,如何高效地对球体进行控制进而避开防守队员带球射门,是决定比赛结果的关键因素。如何提升机器人避障控球效率研究较多,主要包括以博弈论[1-3]、模糊理论[4]、神经网络以及蚁群算法等为代表的从策略角度进行的分析,文献[5]从策略选择的角度对以上研究进行了对比;以机器人协同合作[6-8]为代表的多机器人协作配合策略;以运动路径规划、截球避障[9-14]为代表的机器人单兵作战策略。以上机器人控球运动研究主要以机器人配合为主,往往忽视了球体的受力运动情况。
研究人员一般将机器人抽象为矩形而忽略其实际构造,以文献[10]为例,将机器人模拟为矩形,搭建运动学模型,设计模糊控制算法。首先,在实际比赛中机器人的外观构造会对控球运动产生很大的影响,所以远远无法满足可以忽略的要求;其次,实际比赛过程中机器人避障往往需要带球运动,文献中作者并未考虑球体运动轨迹,无法实现带球避障。
综合上述问题,本文研究了机器人外观与球体之间的联系,提出机器人带球避障过程中存在球体受力和初始角度选择两个限制条件,并针对机器人带球避障的限制条件拟合路径轨迹范围图。
1 实验条件
Mirosot半自主型机器人要求每个机器人尺寸不能超过7.5cm×7.5cm×7.5cm,见图1。球体质量为46g,直径为42.7mm。比赛要求机器人抓球或持球不能超过球体体积的30%,见图2。
在满足上述比赛规则的基础上,本研究基于以下假设:①机器人和球体初始状态静止并保持紧密贴合;②场地摩擦力可忽略不计,球体竖直方向上受力忽略不计,仅进行水平方向上的受力分析;③机器人球槽包含两侧,本文仅进行单侧分析,另一侧同理。
2 数据分析
2.1 机器人持球角度限制
球体直径为42.7mm,机器人持球不超过球体30%,即球体与机器人接触的实际深度不超过12.81mm。如图3所示,机器人在单侧球槽带球时,根据球体直径以及机器人边长计算得出球体与机器人接触的深度为11.14mm。也就是说,按照比赛规则设计的机器人在进行带球运动时,无法实现机器人和球体接触的极限深度12.81mm,即30%,机器人与球体接触的实际最大深度为11.14mm,即26%,见图4。
机器人在进行带球避障时受到力的作用,根据上述条件,计算得出受力角度δ的取值范围为0≤δ≤1.072 2。
2.2 机器人持球受力限制
图5中F1和F2分别表示球体受力的极限方向,球体受力避障的运动路径轨迹不仅受角度δ限制,而且受到力F大小的影响。其中,力F的大小受机器人带球运动加速度的限制,即机器人带球运动加速度越大,球体受力F越大;反之,机器人带球运动加速度越小,球体受力F越小。
2.3 球体受力分析
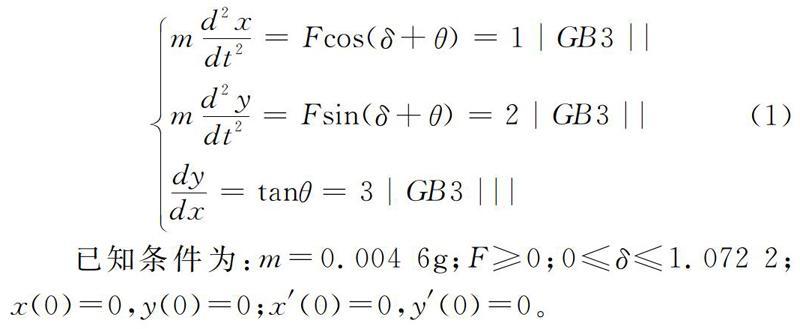
将上述条件精简后,如图6所示,机器人在进行曲线运动时为了与球体始终保持紧密贴合,需要沿球体运动方向的δ角施加力F。
式(1)表示x轴方向加速度与质量的乘积等于x轴方向受力的大小;式(2)表示y轴方向加速度与质量的乘积等于y轴方向受力的大小;式(3)表示曲线斜率。其中,角度θ表示机器人带球转向角,t为时间。
3 轨迹拟合
根据上述方程组可知,时间t为自变量,x,y为关于时间t的因变量,并且力F和角度δ人为取某一定值。
首先,取时间t为0-100s,角度θ为定值1.072 2,力F分别取1N(加号线)、10N(虚线)、20N(实线),进行轨迹拟合,如图7所示。
从图7可以看出,在受力角度θ不变的情况下,随着力F的不断增大,机器人带球运动的轨迹弧度和单位时间内发生的位移都在不断增大,但弧线趋于平缓。
其次,取时间t为0-100s,力F为定值20N,角度θ分别取0(加号线),0.15(虚线),1.072 2(实线)进行轨迹拟合,图像如图8所示。
从图8可以看出,在力F大小不变的情况下,随着受力角度的不断增大,机器人带球进行曲线运动的旋转角度也在不断增大,但是曲线趋于平缓。
4 结论
通过推理和计算得出以下几点结论:
(1)角度限制:机器人带球避障运动初始旋转角度存在限制条件,即 0≤δ≤1.072 2。
(2)受力限制:机器人带球避障运动时,球体受力大小与机器人运动的加速度大小表现为正相关,且机器人带球避障过程中,若加速度不变则球体运动为弧度减小的弧线运动,即为保证机器人带球以某一特定弧度运动时,机器人必须满足加速度增大的加速运动。
(3)球体轨迹:机器人带球进行曲线运动存在力F以及受力夹角δ两个限制因素。力F的大小影响机器人带球运动单位时间内所运动的位移和弧度大小,位移和弧度随着力F的增大而增大。夹角δ影响机器人带球运动的弧度大小,弧度随着δ的增大而增大。利用物理运动学受力分析方法,提出机器人带球避障路径的轨迹方程。
5 结语
通过本文研究可以发现,在Mirosot机器人足球比赛中,机器人带球避障运动路径研究不能忽略机器人的外形构造及球体的运动路径。在未来研究中通过加入本文考虑的球体运动角度以及受力的限制條件,可以有效改善机器人带球避障过程中丢球情况的发生。
参考文献:
[1] 李柏依,刘钊,胡镓伟.动态环境下机器人博弈战术自动产生机制[J].计算机与数字工程,2015(6):1023-1028.
[2] 黎波,李磊民.博弈论的足球机器人进攻策略研究[J].计算机工程与应用,2011,47(30):224-226.
[3] MARTINOVIC J. Robot soccer-strategy description[EB/OL].http:∥www.doc88.com/p-9913174226366.html
[4] MEHTA S. A multiple level MIMO FL based intelligence for multi agent robot system[EB/OL]. http:∥ipasj.org/IIJIT/Volume4 Issue4/IIJIT-2016-04-05-1.pdf
[5] WU J.Analysis of strategy in robot soccer game[J]. Neurocomputing,2013(109):66-75.
[6] 韩家新,刘彦伯,张旭华,等.改进的足球机器人直冲射门算法[J].计算机工程与设计,2013,34(11):4077-4080.
[7] PRATOMO A H. Multiple robots coordination and shooting strategy in robotic soccer game[M]. Next Wave in Robotics,Springer Berlin Heidelberg, 2011:280-289.
[8] LEE D H, NA K I, KIM J H. Task and role selection strategy for multi-robot cooperation in robot soccer[C].Trends in Intelligent Robotics, Fira Robot World Congress, Fira 2010, Bangalore, India, September 15-17, 2010. Proceedings. DBLP, 2010:170-177.
[9] 王发智.一种改进算法在机器人足球截球动作中的应用[J].计算机仿真,2014,31(4):352-354.
[10] 杨小菊,张伟,高宏伟,等.基于模糊神经网络的移动机器人避障研究[J].电子世界,2016(21):189-191.
[11] LAI L C. Parameter estimation of potential field method with fuzzy control for motion planning of soccer robot[M]. Next Wave in Robotics. Springer Berlin Heidelberg, 2011:186-192.
[12] REYES N H, BARCZAK A L C, SUSNJAK T. A reconfigurable hybrid intelligent system for robot navigation[EB/OL]. http:∥onlinelibrary.wiley.com/doi/10.1002/rob.20109/abstract.
[13] JAMESON J. Error analysis in applying fuzzy logic based obstacle avoidance algorithm for robot soccer[M]. FIRA RoboWorld Congress. Springer Berlin Heidelberg, 2013.
[14] LEE D H, NA K I. Task and role selection strategy for multi-robot cooperation in robot soccer[M]. FIRA RoboWorld Congress. Springer Berlin Heidelberg, 2010.
(责任编辑:杜能钢)