一种混联软性抛光机器人的设计与开发
2018-05-16 09:44余运昌
五邑大学学报(自然科学版) 2018年1期
余运昌
一种混联软性抛光机器人的设计与开发
余运昌
(厦门海洋职业技术学院 机电工程系,福建 厦门 361100)
针对当前抛光行业还停留在人工操作、生产效率低、生产质量不稳定和中小微企业的实际现状,设计出一款混联软性抛光机器人系统. 该机器人系统具有抛光接触力自适应调节能力,适用于平面、回转体等金属铸件表面的抛光. 通过PLC对该抛光机器人系统的变频电机、伺服电机及力平衡气缸进行控制,实现机器人对金属表面的全自动抛光功能. 实验证明,本机器人具有抛光效率高、抛光质量稳定的特点,特别适合中小型抛光企业.
混联控制;软性抛光机器人;抛光接触力自适应
砂带磨削是一种软性磨削加工方法,具有较高的磨削效率和生产质量. 砂带磨削抛光具有磨削、研磨、抛光的多重作用,是金属表面磨削抛光的一种常见加工方法. 目前,金属表面的磨削抛光以人工为主,由于磨削抛光过程产生的金属粉尘对人体危害大,导致相关企业严重的“用工荒”;同时,人工操作难以控制产品的抛光质量和生产效率[1]. 对金属产品表面抛光工艺分析发现,磨头胶轮与工件接触力的大小直接影响抛光效果,因此抛光机器人系统应具有抛光接触力自调节功能[2]. 六自由度工业机器人和砂带恒定力抛光系统[3]虽然能实现自动打磨抛光,但设备昂贵,难以在薄利的打磨抛光中小微企业大规模应用. 本文考虑厦门某企业的实际状况,设计并开发了适合金属铸件抛光力自适应的低成本软性磨削抛光机器人系统,系统采用一个伺服电机、一个三相异步电机和力平衡气缸组成的混合驱动方式.
1 抛光主机结构设计

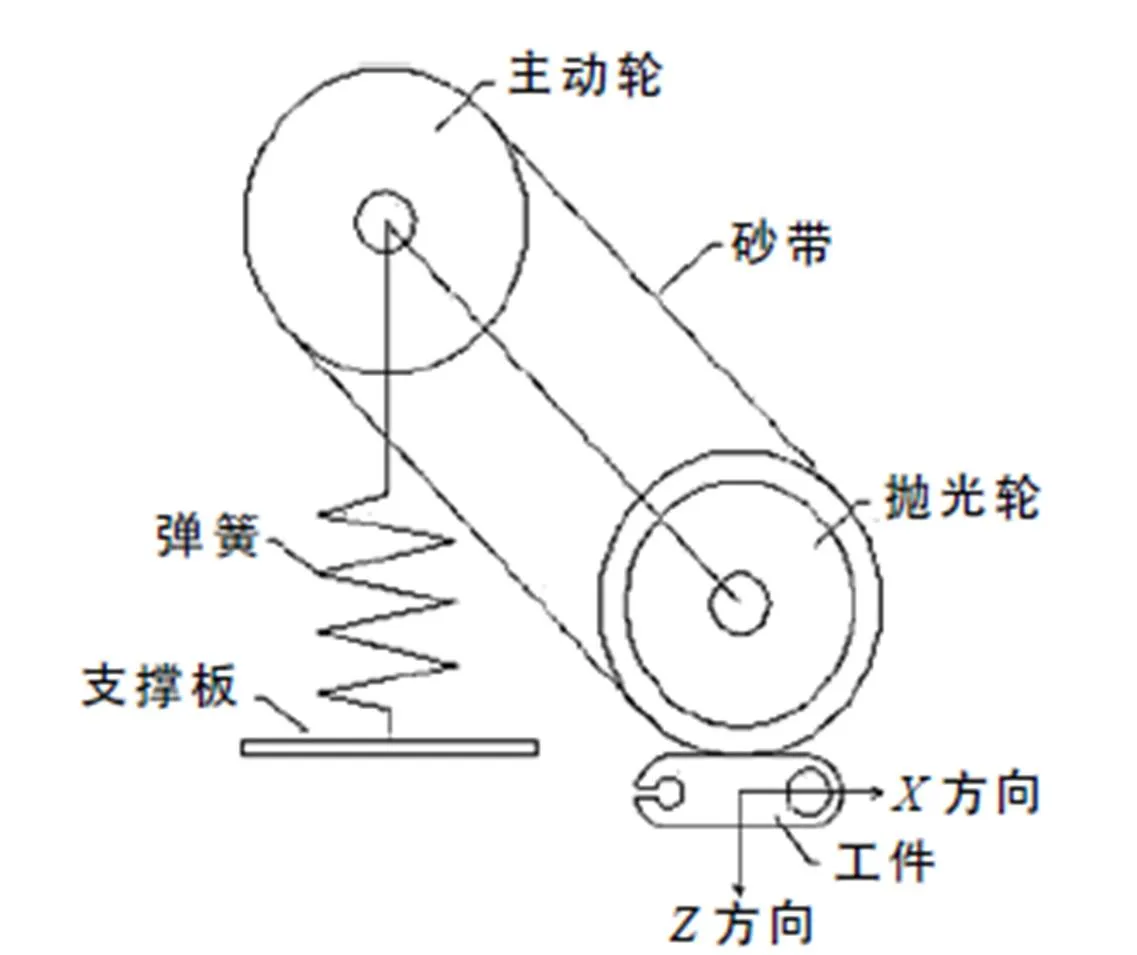
图1 抛光系统工作原理
1.1 主动轮直径

1.2 砂带张力


根据已知的电机功率和抛光轮的直径,在电动机额定转速下,计算出砂带的张力为

1.3 张紧气缸缸径


1.4 抛光接触力


表1 抛光机构主要部件及参数
完成抛光机构主要部件的计算和技术选型后,采用PROE5.0绘制的抛光机三维结构如图2所示.
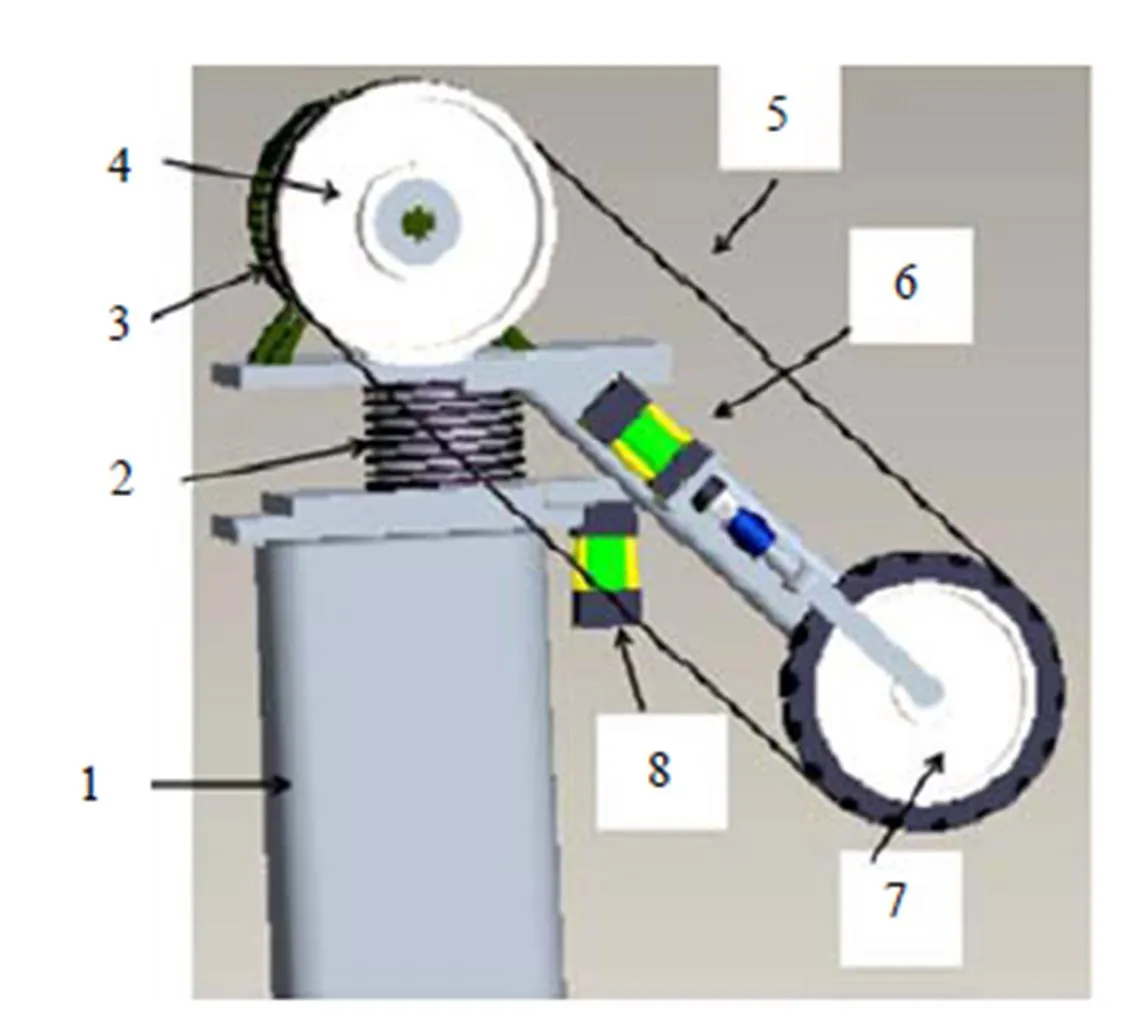
1.抛光机底座;2.大弹簧;3.抛光电机;4.全铝轮;5.抛光砂带;6.张紧气缸;7.抛光槽轮;8.顶起气缸
2 混联抛光机器人控制系统设计
本混联磨削抛光机器人属于企业自用设备,综合考虑经济效益和开发周期,选择PLC作为控制器、触摸屏作为人机交互界面. 变频调节三相电机的转速从而控制砂带的磨削线速度,以适应不同材料的砂带磨削抛光工艺.
2.1 PLC及电机控制
信捷XC3-24T-C具有14位输入信号端口、10位输出信号端口(2路高速数字脉冲输出端口). 2个通信口均能用于编程下载和通信,通常,通信口1用作程序下载,通信口2用作网络通信. 本设计用通信口2与三菱变频器通信以调节抛光电机的转速.
2.2 抛光机器人工作流程设计
本机器人主要用于金属铸件的全自动磨削抛光过程. 在一个工件的磨削抛光过程中,机器人通过运行PLC程序完成工件夹紧、定位、磨削抛光加工、工件松开等动作. 具体抛光工作流程如图3所示:
1)由机械手或工人将待加工件放置在夹具上完成工件的上料;

图3 机器人抛光工作流程
2)按下启动按钮,夹具将工件夹紧,抛光电机启动并达到系统设定的转速;
3)磨头气缸将自适应抛光系统释放,胶轮磨头压到工件表面并开始磨削抛光工作,工件按照预定的轨迹进行直线移动和旋转运动;
4)完成抛光工作后,磨头气缸将自适应抛光磨头顶起,抛光电机停止运行,工作台回原点,夹具释放工件,由机械手或工人取走工件;
5)上述4个步骤为一个抛光循环周期. 完成一个循环周期后,PLC计数器累加1,已完成加工工件数显示到触摸屏上.
表2是根据以上工作流程设计的PLC输入输出端口分配详情.

表2 PLC输入输出端口分配明细
2.3 人机交互系统设计
本设计的人机交互系统选用台达DOP-B系列触摸屏,型号为B07S411,用于设备信息状态的监视和控制命令、数据的输入. 图4为本设计的抛光机器人系统的人机界面,包括手动模式控制界面、自动控制界面和参数设置界面. 手动控制界面主要用于系统的调试与维修,可以实现对伺服电机、抛光电机或者单个气缸的控制. 自动控制界面主要用于机器人状态的监视以及抛光完成工件的计数. 参数设置界面用于设置机器人运行参数,主要包括自适应抛光系统释放和抬起位置、工件旋转速度、夹具松紧时间及横移气缸的移动位置.

图4 人机交互系统界面
3 混联软性抛光机器人的实验验证
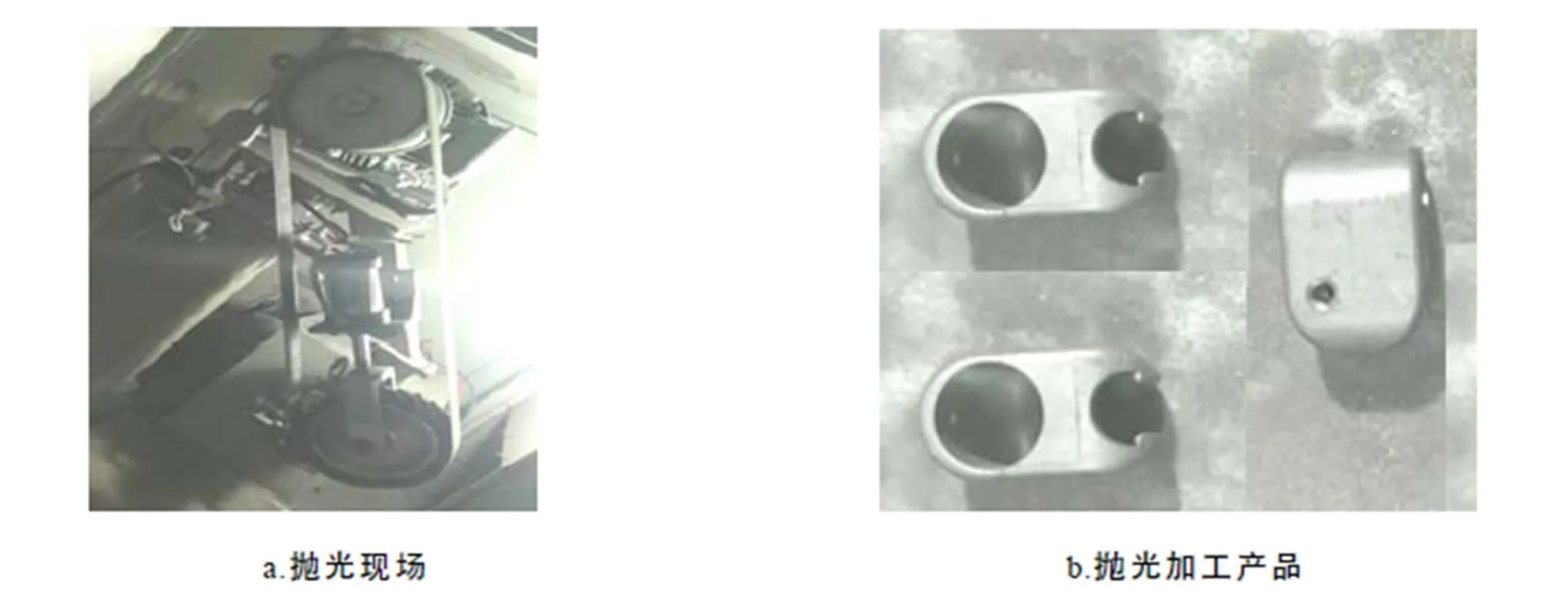
图5 机器人抛光实验
4 结束语
本设计的混联软性抛光机器人控制系统由PLC和触摸屏组成,能实现气缸和伺服电机的混合控制,完成工件的全自动抛光过程. 由弹簧、胶轮、砂带、电机等组成的抛光力自适应系统,能使作用在工件上的抛光力均匀,达到较佳的抛光质量. 本混联软性抛光机器人具有成本低、效率高和抛光质量稳定的特点,具有广阔的市场前景.
[1] 江励,杜天才,徐文杰,等. 一种混联自动抛光机器人控制系统的设计[J]. 五邑大学学报(自然科学版),2017, 31(2): 58-61.
[2] 唐杰,王涛,常青,等. 模具抛光机器人柔性终端执行器设计与分析[J]. 机械设计与制造,2016(2): 263-266.
[3] 黄海滨,柯小龙,林晓辉. 铝合金机器人砂带恒定力抛光系统设计及仿真[J]. 重庆理工大学学报(自然科学版),2014, 28(11): 32-36.
[责任编辑:熊玉涛]
Design and Development of a Hybrid Soft Polishing Robot
YUYun-chang
(Department of Mechanical Engineering, Xiamen Ocean Vocational College, Xiamen 361100, China)
In light of the needs of the current polishing enterprises, which are still stuck at the manual operation stage with low production efficiency and unstable quality, a hybrid soft polishing robot system with adaptive polishing contact force is designed to solve the problem. Different kinds of surface such as plane surface and revolved bodies can be polished by the system. A PLC system is used to control a sever motor, a frequency conversion motor and force balancing cylinders to achieve automatic polishing. Experiments show that the efficiency and quality of polishing is improved by using the robot system, which is especially suitable for small and medium polishing enterprises.
hybrid control; soft polishing robots; polishing contact force self-adoption
1006-7302(2018)02-0067-05
TP242
A
2018-03-10
余运昌(1979—),男,福建建宁人,讲师,硕士,研究方向为移动机器人、数控技术.
猜你喜欢
湖南电力(2022年3期)2022-07-07
科学大众·教师版(2021年9期)2021-09-05
上海采风月刊(2021年2期)2021-04-29
制造技术与机床(2019年7期)2019-07-22
电子制作(2018年17期)2018-09-28
制造技术与机床(2017年5期)2018-01-19
制造技术与机床(2017年11期)2017-12-18
财经科学(2014年8期)2015-04-21
组合机床与自动化加工技术(2014年12期)2014-03-01