
基于支持向量机的塔机驾驶员操作行为分析
2018-05-18 12:33曲寒冰王加强
建筑机械化 2018年4期
董 良,曾 勃,曲寒冰,王加强,靳 薇
(1.北京市科学技术研究院,北京 100094;2.北京市新技术应用研究所,北京 100094;3.北京城市副中心行政办公区工程建设办公室,北京 101117;4.北京市住房和城乡建设委员会,北京 100037)
1 引 言
塔机是建筑施工领域常见的特种作业设备,具有容错率低、事故风险高、操作难度大的特点,相对于其他建筑施工设备更容易发生安全生产事故,往往会造成重大的人员伤亡,对施工人员及周围设施造成重大危害。因此,对塔机安全操作的研究一直是国内外建筑行业的研究重点。
目前,国内关于塔机安全使用的研究大多集中在塔机防碰撞系统构建和塔机受力分析方面。许景波等基于超声波测距技术设计了一种用于障碍物检测的防碰撞探测器,并在MATLAB中成功地进行了仿真测试;黄建文等利用GPS/RFID组合定位技术,增强了防碰撞系统的可靠性;李志国在塔机受力方面利用有限元分析和ANSYS技术对快架塔塔身的几种危险工况进行分析,并从塔机机身设计的角度提出了塔机安全优化方案。
文献调研显示,现有的研究还较少关注塔机驾驶员(以下简称塔司)的自身行为如何对塔机安全生产产生影响。事实上,经过对塔机事故的统计发现,操作人员的素质是造成塔机事故的重要因素之一。在国外关于塔机风险因素的分析研究中,Raviv G.等将收集到的51起已发事故与161起未遂事故划分成五类并使用层次分析法对造成事故的风险因素进行定量分析,最终得到所有潜在风险事件的总风险值并进行比较。研究结果发现技术因素和人为因素是造成塔机事故的核心要素,塔机从业人员的专业知识和技能不足已经成为塔机事故频发的普遍诱因。因此,对塔司操作行为的个性化分析与定量化研究已显得愈发重要。
在塔机黑匣子广泛运用的今天,传感器记录的塔机运行数据可以有效地记录按照《GB3811起重机设计规范》定义的完整吊装过程。因此,塔机操作记录可以看作是一种长度有限的周期信号。图1给出了塔机回转机构传感器所记录的打回车、提前刹车和规范吊装3种典型操作行为的时域波形及其频谱。其中,打回车和提前刹车是塔司操作水平较低的体现,表现为时域波形抖动并有超调现象,而标准操作行为的曲线则比较平滑,没有超调现象。

图1 三种典型操作角度时频图
2 理论依据
2.1 快速傅里叶变换
快速傅里叶变换(Fast Fourier Transform,缩写为FFT)是离散傅里叶变换的一种快速实现方法。对于N点时间序列信号x(n),若要求出N点x(k)需要运算N2次复数乘法及N(n-1)次复数加法,当N很大时,其计算量也较大。为了降低其运算量,Cooley和Tukey于1956年提出了快速傅里叶变换算法,使N点DFT的复数乘法计算量N2由降低为次,可以大幅提升离散傅里叶变换的计算速度。
2.2 支持向量机
支持向量机(Support Vector Machine,缩写为SVM)是Corinna Cortes和Vapnik等于1995年首先提出的一种有监督的机器学习方法。SVM通过学习一部分“优劣”已知样本的特征,最终达到对“优劣”未知样本分类的目的。在本文中,“优劣”即为塔司的每个操作行为所属的类别,即打回车、提前刹车和规范操作,样本的特征即为回转机构传感器所记录的塔司一个循环内操作信号的频谱特征。
假设存在样本数据集其中x是样本特征向量,y是类别标签,满足yi∈Y={+1,-1}(二分类情况)。根据支持向量机理论,在线性可分情况下,则至少存在一个超平面
使得样本集中的正、负样本集各自处于超平面H0两侧,且H0距离两类样本距离之和最远。
3 数据采集及预处理
本文所采用的实验数据来源于北京某大型工地,塔机传感器数据平台记录了98位塔司在2016年11月到2017年1月间,36台塔机生成的约548万条塔机运行监控数据,记录了塔机吊钩起升高度、小车变化幅度、吊臂回转角度、起吊吊重和生成时间等数据,每条记录间隔10s,这些数据为典型的时间序列数据,如表1。本文遵循GB 3811《起重机设计规范》中对循环的定义:“从起吊一个物品起,到能开始起吊下一个物品时止,包括起重机运行及正常的停歇在内的一个完整的过程”,综合利用多路传感器信号从数据集中分解出每个吊装过程。

表1 实验数据样例
为了验证提出方法的可行性,通过以下步骤人工筛选出276个循环作为实验数据:①对运行记录添加循环标志位,分解出每个吊装过程;②去除原始数据集中无载重的循环;③通过可视化手段,标注打回车、提前刹车及规范操作3类操作行为,如图2所示。最后,标注了276个循环数据作为实验样本,其中,打回车82例,提前刹车104例,规范操作90例。
由图2可知,每个循环内回转角度变化的长度、角度值均不相同,没有统一的特征空间,所以我们通过对操作信号的补齐和归一化来去除信号长度和操作角度值对于频谱分析的影响。对276个样本数据进行如下预处理:①补齐数据,统一时域信号长度。为了统一原始信号的FFT频率分量的度量空间,将波形统一补齐至128个数据,长度不足128的使用首、末尾数值进行填补。②角度值归一化,消除FFT模值量纲影响。首先,将时域波形减去最小值使其向上平移,然后,除以最大值将角度幅值归一化至同一量纲[0,1]内。图3给出了数据预处理的完整过程。
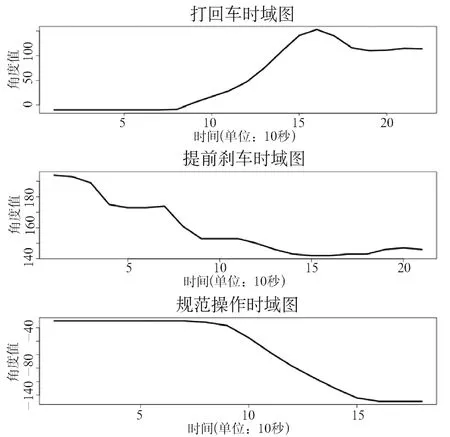
图2 打回车、提前刹车和规范操作时域波形变化图

图3 数据预处理过程
4 实验分析
4.1 频谱变换
根据2.1节知识,对预处理后的276个样本数据进行FFT变换,得到各样本数据的频域波形图。图4给出了3类操作在区间n∈[2,64]的频谱系数振幅分布情况。

图4 三种操作叠加12个样本的时域图与FFT振幅值谱图
通过观察3类操作FFT变换后的频域振幅的分布情况可以发现,3种操作在各个频率分量的振幅相差明显,其中打回车与提前刹车在大于0.02Hz的频段有明显的频率分量,而规范操作的频率分量则主要在集中在小于0.02Hz的频段。此外,规范操作的低频分量波形相对光滑,而打回车与提前刹车操作的低频分量波动明显。因此,我们可以将3类操作的63维频率分量的振幅作为SVM分类器的备选特征。
4.2 特征选择
4.2.1 特征筛选
首先,使用Pearson相关系数法对63维特征进行相关性分析。相关系数高于0.8的特征如表2所示。

表2 强相关性特征
由于高相关性特征可以互相代替,表2中4组特征中去除任一特征,都不会对分类器性能产生较大影响,因此,去除表2中第二列特征,得到59维特征。
其次,利用随机森林模型确定最佳特征及其个数。去除相关特征后的59维特征输入随机森林模型,可以得到特征维数与模型袋外(Out of Bag,缩写为OOB)样本精度的关系曲线,如图5所示。其中,横轴代表输入特征的个数,纵轴代表模型的袋外样本识别精确度。当特征数目为9维时,模型的OOB精确度最高,为87.2%。此外,随机森林模型使用Mean Decrease Accuracy度量特征的重要程度,如表3所示。

图5 利用随机森林模型确定最佳特征数

表3 特征选择结果
4.2.2 降维可视化
利用线性判别分析(Linear Discriminant Analysis,缩写为LDA)降维对随机森林方法筛选出的9维特征降低至2维进行可视化,276个样本在2维空间中分布的情况如图6所示,3类违章操作被较好地区分,这些特征可以作为特征输入分类器。
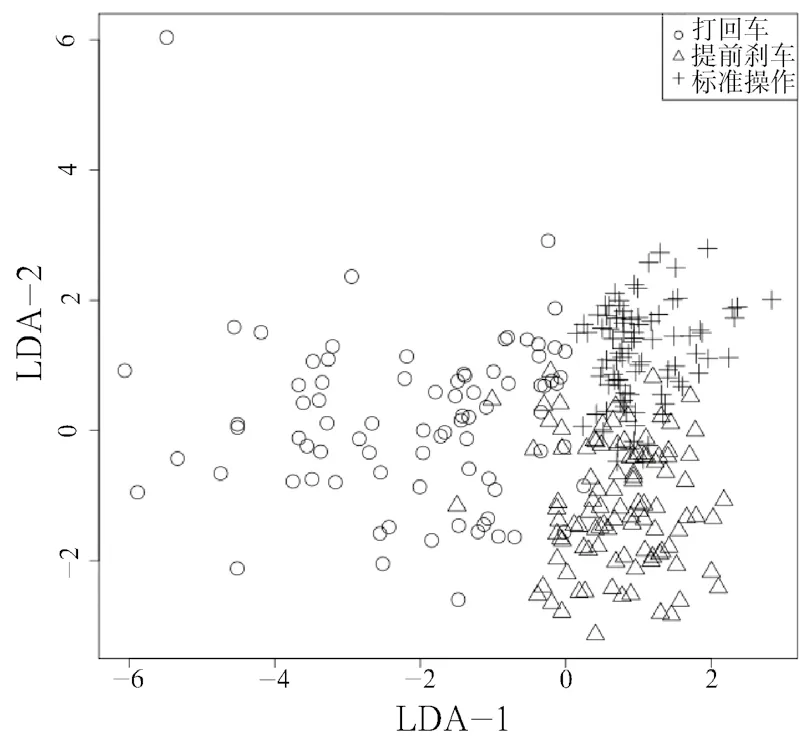
图6 LDA降维可视化图
4.3 分类器设计
本文使用SVM作为分类器,对塔司每个循环的操作行为进行识别。采用LIBSVM工具箱实现SVM,选用线性核函数。首先,使用276个数据对支持向量机分类器进行训练,整体考察SVM分类器对塔司单次循环的操作类型分类效果。图7给出276个样本以及SVM支持向量机在二维空间的分布情况。

图7 支持向量机分类结果
表4给出了本次分类的混淆矩阵,可以看出SVM分类器在对打回车操作的识别精度为92.5%,对提前刹车操作的识别精度为84.7%,对规范操作的识别精度为91.7%。

表4 SVM分类器混淆矩阵
为了考察SVM分类模型的泛化能力,本文以7∶3的比例将276个实验数据分为训练集与测试集,即193个数据用于训练分类器,83个数据用于测试分类器的精度。通过200次的重复实验,我们可以得到SVM分类的训练误差和测试误差的分布情况(图8),以及训练误差和测试误差的平均误差水平(表5)。
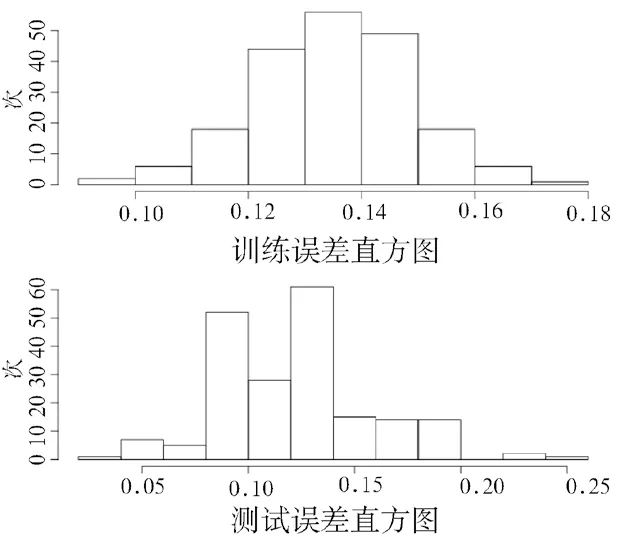
图8 交叉确认误差分布直方图
表5 交叉确认误差平均值
计算发现,SVM对训练集的分类准确率约为87.3%,对测试集分类准确率约为86.9%。从分类结果可以看出,我们提出的基于塔司操作特性曲线频域特征的SVM分类器可以很好地对3类操作行为进行分类。基于本文提出的方法,对实验中涉及的8位塔司的所有21917个循环操作曲线进行整体分类识别,如表6所示,操作最好的塔司为张某晶,其规范操作占比约28%,最差的陈某华规范操作占比约为25%。
5 结 论
本文提出了一种在机器学习框架下,基于频谱特征对塔司3种典型操作行为—打回车、提前刹车与规范操作进行行为识别的SVM分类器的设计与实现。该方法中涉及的主要分析流程为特征提取、特征选择与分类器设计3大模块,采用的技术主要包括快速傅里叶变换、随机森林与支持向量机。通过对采集数据的分析,本方法对3类操作行为实现了约87%的识别精度,能够可靠地识别出塔司的3类操作行为,从而实现对塔司操作行为的定量评价。
该方法不但有助于管理人员规范工人操作行为,还有助于安全部门更加精准地评价塔司的操作水平。通过对每个塔机传感器实时上传数据的分析,可以及时地发现塔司的不良操作,为避免塔机安全事故提供了理论指导和技术支撑,对智慧工地精准化管理进行了有益的探索。
致谢:感谢中国建筑科学研究院建筑机械化研究分院的李守林研究员、罗文龙研究员以及姚金柯研究员,各位专家为本课题研究提出的宝贵的指导意见并为本课题研究提供了塔机传感器数据及相关资料。
[参考文献]
[1]许景波,赵 宇,沈永滨,等.基于超声波测距的塔机防碰撞探测器设计[J].传感器与微系统,2016,35(3):127-129.
[2]黄建文,祝建军,张 婷.基于GPS/RFID组合定位的缆机塔机防碰撞系统研究[J].中国安全生产科学技术,2015,11(10):90-95.
[3]李志国,鲍会丽,田春伟.基于ANSYS的快架塔塔身静力学分析[J].建筑机械化,2017,38(1):29-31.
[4]余群舟,孙博文,骆汉宾,等.塔机事故统计分析[J].建筑安全,2015,30(11):10-13.
[5]Raviv G,Shapira A,Fishbain B.AHP-based analysis of the risk potential of safety incidents: Case study of cranes in the construction industry[J].Safety Science,2017,91(c):298-309.
[6]Raviv G,Fishbain B,Shapira A.Analyzing risk factors in crane-related near-miss and accident reports[J].Safety Science,2017,91(c):192-205.
[7]全国起重机标准化技术委员会组织编写.GB/T 3811-2008《起重机设计规范》释义与应用[M].北京:中国标准出版社,2008.
[8]Cooley J W,Tukey J W.An Algorithm for the Machine Calculation of Complex Fourier Series[C]// Math.Comp.1965.
[9]Vapnik,Vladimir N.The nature of statistical learning theory[J].Technometrics,1997,(6):15-64.
[10]Breiman L.Random Forests[J].Machine Learning,2001,45(1):5-32.
[11]靳 薇,曾 勃,董 良,等.面向智慧工地的塔机安全管理大数据分析初探[J].建筑机械化,2018,(3):22-27.
猜你喜欢
北部湾大学学报(2022年1期)2022-06-22
北部湾大学学报(2022年2期)2022-06-21
现代仪器与医疗(2021年4期)2021-11-05
北部湾大学学报(2021年4期)2021-04-28
电子技术与软件工程(2017年14期)2017-09-08
计算机应用(2017年4期)2017-06-27
科普童话·百科探秘(2015年6期)2015-10-13
伴侣(2015年5期)2015-09-10
大众科学(2015年10期)2015-09-10
航天返回与遥感(2014年5期)2014-07-31
