基于PHD滤波的箱粒子划分多目标跟踪算法
2018-05-18 05:32吴孙勇宁巧娇蔡如华刘义强孙希延
电光与控制 2018年5期
吴孙勇, 宁巧娇, 蔡如华, 刘义强, 孙希延
(1.桂林电子科技大学数学与计算科学学院,广西 桂林 541004; 2.广西精密导航技术与应用重点实验室,广西 桂林 541004)
0 引言
多目标跟踪是指对获得的多个量测信息进行处理,实现对多个目标的状态估计。非线性动态随机系统的多目标检测与跟踪方法中的量测具有随机性、集合论以及数据联合不确定性[1]3个不确定性。美国数学家MAHLER在随机有限集理论(RFS)的基础上,提出了有限集统计学理论(FISST)[2],随后提出了概率假设密度(Probability Hypothesis Density,PHD)滤波[3]。PHD滤波是用一阶统计矩近似后验概率密度函数,该算法将复杂的多目标状态空间运算转化为单目标状态空间运算,有效避免了复杂数据联合问题。文献[4]给出了PHD滤波的序贯蒙特卡罗实现,也称粒子滤波,可以解决非线性、非高斯条件下的多目标跟踪。
虽然粒子滤波可以解决非线性、非高斯条件下的多目标跟踪,但为了达到较好的效果,通常需要大量的粒子去拟合。粒子数量较大时,会导致计算量增加,需要更多的运行时间。近年来,国外学者ABDALLAH,GNING和RISTIC等将区间分析的方法引入到粒子滤波中,提出了箱粒子滤波算法,箱粒子滤波既能有效减少粒子数,又能很好提高跟踪性能[5-6];随后SCHIKORA等[7-8]结合随机有限集滤波提出了BOX-PHD滤波的多目标跟踪算法,该算法只需更少的粒子就能达到传统粒子PHD滤波的跟踪效果,计算效率更高。所以近年来,箱粒子滤波因其优势已经应用于机动目标跟踪[9]、未知杂波环境下的目标跟踪[10]、扩展目标[11-13]和群目标跟踪[14]等研究。箱粒子滤波在目标的观测值偏离真实或观测噪声较大时, 目标的状态估计是有偏的[15-17]。考虑到现有的箱粒子概率假设密度滤波[7-8]在目标比较靠近,且区间量测大小由于观测噪声的影响须取得较大时,区间量测在更新阶段不能较好地压缩箱粒子,最后箱粒子包含的信息就会有冗余,此时直接采用箱粒子的中心估计目标的状态,就会产生较大的偏差。
本文针对现有箱粒子概率假设密度(BOX-PHD)滤波存在箱粒子冗余问题,提出一种基于概率假设密度滤波的箱粒子划分多目标跟踪算法。该改进算法将通过状态转移传递得到的箱粒子进行划分,使得箱粒子由一个变多个,再利用区间量测对箱粒子的大小和权值进行修正,最后采用箱粒子的中心去估计目标的状态。仿真实验表明,所提算法能提高目标的跟踪性能,对目标状态估计有偏起到了很好的修正作用。
1 问题描述
考虑在k(k=1,2,…)时刻,存在Nk个目标和Mk个量测,则目标的状态和量测可以用一个随机有限集表示为
(1)
k时刻目标i(i=1,2,…,Nk)的运动方程以及对应的量测方程可表示为
(2)
式中:xk-1,i和xk,i分别为k-1时刻和k时刻目标i的状态向量;zk,i为k时刻目标i对应的量测;fk-1(·)和hk(·)为非线性函数,分别表示状态向量xk-1,i从k-1时刻到k时刻目标的状态转移函数和k时刻状态xk,i与量测zk,i的非线性关系;vk,i和wk,i分别为已知的k时刻目标i的过程噪声和观测噪声。
根据贝叶斯理论,滤波的实现可以分为预测阶段和更新阶段,预测是实现目标状态的转移,更新则是在预测的基础上利用当前量测来做出修正。根据目标的状态转移服从一阶马尔可夫过程,所以预测和更新过程可以分别描述为

(3)
(4)
式中:fk|k-1(Xk|Xk-1)为状态转移概率密度;gk(Zk|Xk)为似然函数。最后再利用后验概率密度去估计目标的状态。
2 基于概率假设密度滤波的箱粒子划分
BOX-PHD滤波是基于序贯蒙特卡罗的概率假设密度(Sequential Monte Carlo Probability Hypothesis Density,SMC-PHD)滤波和区间分析结合提出的。区间分析可以有效地处理某些参数不精确已知的情况,从而实现对数据的存储和计算。在BOX-PHD滤波中,新生的箱粒子是根据前一个时刻的区间量测产生的,通常那些有量测出现的位置更容易出现目标,这样就避免了采用大量的箱粒子去拟合,降低一定的计算效率。当观测噪声比较大时,区间量测的选取为了保证包含真实信息,区间必须足够大,此时箱粒子是根据量测信息产生的,这样的箱粒子除了包含真实目标状态信息外必然还会引入更多的无效信息。本文针对估计目标的状态时采用箱粒子的信息有冗余而导致估计目标状态有偏的情况,在原有的BOX-PHD滤波的基础上进行补充,描述如下。

(5)
(6)

3) 对上述得到的箱粒子集通过区间量测进行权值更新
(7)
(8)
其中,似然函数为广义似然函数,即
(9)

4) 估计目标状态。为了避免杂波的影响,本文采用文献[8]方法,首先计算出所有划分后箱粒子对应的各个区间量测的更新权值,即
(10)
再求出各个量测的权值和
(11)
从而将得到的权值和作为第j个量测是真实目标量测的概率,当这个概率大于一定的门限τ时,一般τ=0.75,则认为对应的量测为真实目标的量测。
J={j|Wj>τ,j=1,…,mk}
(12)
最后对于所有的j∈J提取目标的状态,即
(13)
利用每一个区间量测去更新箱粒子的权值,最后估计目标的状态时是根据每一个量测对应所有箱粒子的权值和作为判断该量测是否为真实目标量测,从而估计目标的状态和数目。可以有效避免当多个目标距离较近时,由于各个目标产生的量测较为接近,而引起的目标估计不准确情况。

3 仿真分析与对比
在二维仿真场景中,存在4个变化的目标,目标的状态转移模型为
[xk+1]=F[xk]+Γw
(14)

[z]k=[hk(X)+vk-0.5Δ,hk(X)+vk+0.5Δ]
(15)
式中:区间的长度为Δ=[20,20]T;vk为零均值高斯白噪声。目标的存活概率为PS=0.99,OSPA距离[18]的参数分别为p=2,c=70。
假设共有4个目标:初始状态为x1=[40,16,800,-15]T,从1到31时刻存活;x2=[100,12,80,15]T,从4到60时刻存活;x3=[900,-10,960,-16]T,从7到52时刻存活;x4=[400,0,80,16]T,从16到60时刻存活。图1所示为杂波均值r=3和检测概率PD=0.99条件下的一个量测信息,图2所示为目标状态的估计图。
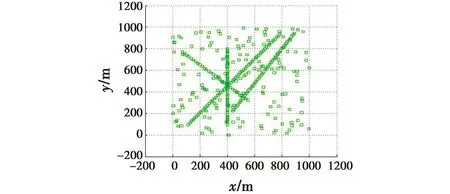
图1 区间量测分布图Fig.1 Interval measurement distribution
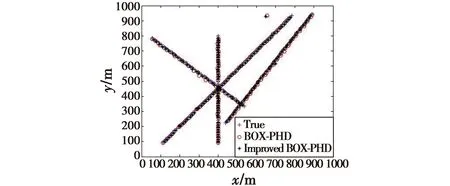
图2 目标状态估计Fig.2 Target states estimation
从图中可以看出,区间量测近似散布在区间[0,1000]×[0,1000]范围内,并且两种方法都能实现对目标的跟踪。
本文改进箱粒子概率假设密度(Improved BOX-PHD)滤波的目标跟踪算法使用Matlab R2013a运行100次蒙特卡罗实验。图3所示为杂波均值r=3和检测概率PD=0.99条件下改进算法与原有算法的目标状态估计的平均OSPA距离误差。
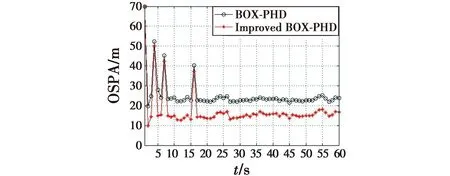
图3 平均OSPA距离误差估计(r=3,PD=0.99)Fig.3 The average OSPA distance error estimation when r=3 and PD=0.99
由图可知,由于在初始时刻,目标的初始状态选取为空集,所以两种算法在开始都还不能估计出目标的状态,且在目标出现时,估计都出现了一定的延时。改进的算法在目标状态估计的平均OSPA距离误差上始终都比原有BOX-PHD滤波要小,说明该算法能有效地修正由于采用压缩不充分的箱粒子去估计目标状态而引起的偏差。
图4所示为100次蒙特卡罗实验得到的平均目标数目估计。
由图可知,改进的算法与原有算法在目标数目估计上是类似的,而当目标的数目改变时,目标数目的估计出现了延时,这也是导致图3中估计的OSPA距离误差出现较大峰值的原因。表1为两种算法单次运行时间的比较,Improved BOX-PHD滤波由于划分使得箱粒子的个数增多,计算效率会有所降低。

图4 平均目标数目估计(r=3,PD=0.99)Fig.4 The average number of target estimation when r=3 and PD=0.99

BOX⁃PHDImprovedBOX⁃PHD单次运行时间19.93315934.970475
图5所示为杂波均值r=8和检测概率PD=0.95条件下的OSPA距离误差,图6所示为目标个数估计的平均数目。

图5 平均OSPA距离误差估计(r=8,PD=0.95)Fig.5 The average OSPA distance error estimation when r=8 and PD=0.95
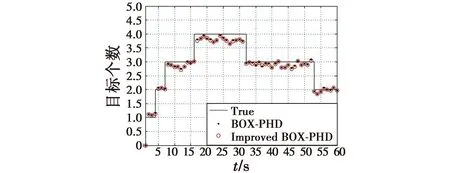
图6 平均目标数目估计(r=8,PD=0.95)Fig.6 The average number of target estimation when r=8 and PD=0.95
图5、图6与图3、图4对比可知,当杂波率变大、检测概率变小时,对于目标的估计都有影响,但改进算法的估计效果都比原有算法要好。将1个箱粒子划分为等价的4个箱粒子,这样的方式对于目标的检测影响并不大,在新目标出现时都会出现漏检现象。从图6可知,当杂波率变大时,杂波量测参与了权值的计算和目标位置的加权,导致了目标数目估计不准确。
4 结论
本文对箱粒子概率假设密度滤波进行深入分析和研究,在现有的箱粒子概率假设密度滤波的多目标跟踪算法的基础上,通过在预测与更新阶段之间增加箱粒子划分为更小箱粒子的方法,有效地改进了目标跟踪过程中状态估计有偏的情况,对最终目标的状态估计起到了很好的修正作用。
参 考 文 献
[1] GNING A,RISTIC B,MIHAYLOVA L.Bernoulli particle/box-particle filters for detection and tracking in the presence of triple measurement uncertainty[J].IEEE Transactions on Signal Processing,2012,60(5):2138-2151.
[2] MAHLER R P S.Statistical multisource-multitarget information fusion[M].London:Artech House,2007.
[3] MAHLER R P S.Multitarget Bayes filtering via first-order multitarget moments[J].IEEE Transactions on Aerospace Electronic Systems,2003,39(4):1152-1178.
[4] VO B N,SINGH S,DOUCET A.Sequential Monte Carlo methods for multitarget filtering with random finite sets[J].IEEE Transactions on Aerospace Electronic Systems, 2005,41(4):1224-1245.
[5] ABDALLAH F,GNING A,BONNIFAIT P.Box particle filtering for nonlinear state estimation using interval analysis[J].Automatica,2008,44(3):807-815.
[6] GNING A,RISTIC B,MIHAYLOVA L,et al.An introduction to box particle filtering[J].IEEE Signal Processing Magazine,2013,30(4):166-171.
[7] SCHIKORA M,GNING A,MIHAYLOVA L,et al.Box-particle PHD filter for multi-target tracking[C]//The 15th International Conference on Information Fusion,Singapore, 2012:106-113.
[8] SCHIKORA M,GNING A,MIHAYLOVA L,et al.Box-particle probability hypothesis density filtering[J].IEEE Transactions on Aerospace and Electronic Systems,2014,50(3):1660-1672.
[9] 梁萌.基于箱粒子滤波的多目标跟踪算法研究[D].西安:西安电子科技大学,2015.
[10] 魏帅,冯新喜,王泉.未知杂波状态下基于箱粒子滤波的PHD算法[J].探测与控制学报,2017,39(2):94-105.
[11] ZHANG Y Q,JI H B,HU Q.A box-particle implementation of standard PHD filter for extended target tracking[J].Information Fusion,2017(34):55-69.
[12] 宋骊平,严超,姬红兵,等.基于箱粒子的多扩展目标PHD滤波[J].控制与决策,2015,30(10):1759-1765.
[13] 刘艳君,刘祖鹏.基于箱粒子的ET-CBMeMBer滤波算法[J].电光与控制,2017,24(8):56-60.
[14] 李振兴,刘进忙,李松,等.基于箱式粒子滤波的群目标跟踪算法[J].自动化学报,2015,41(4):785-798.
[15] LI W,HAN C Z.Clustering based box-particle probability hypothesis density filtering[C]//The 20th International Conference on Information Fusion,2017:1-7.
[16] 宋骊平,刘宇航,程轩.箱粒子PHD演化网络群目标跟踪算法[J].控制与决策,2018,33(1):74-80.
[17] 于洁,刘昌云,李志汇.箱粒子滤波理论综述[J].电光与控制,2015,22(11):56-60.
[18] RISTIC B.Particle filters for random set models[M].New York:Springer,2013:20-22.
猜你喜欢
成都信息工程大学学报(2022年3期)2022-07-21
环球人物(2022年4期)2022-02-22
科学与信息化(2021年30期)2021-12-24
小资CHIC!ELEGANCE(2021年32期)2021-09-18
沈阳师范大学学报(教育科学版)(2021年2期)2021-02-01
自动化学报(2017年7期)2017-04-18
现代电子技术(2016年15期)2016-12-01
西北工业大学学报(2015年3期)2015-12-14
遥测遥控(2015年2期)2015-04-23
小学阅读指南·高年级版(2014年2期)2014-05-27