基于案例和MAX-MIN云推理的UCAV双层战术决策
2018-05-18 05:34刘小平唐传林
电光与控制 2018年5期
刘小平, 王 杰, 李 聪, 唐传林
(1.内江师范学院,四川 内江 641112; 2.空军工程大学航空航天工程学院,西安 710038)
0 引言
无人作战飞机作为一股新生力量,在越战、海湾战争、阿富汗战争、伊拉克战争等局部战争中展现出的巨大作战潜力,使其迅速成为世界各国的研究热点,从理论到工程领域的研究热度都在持续升温,世界上各个军事大国都在探索和发掘无人机在作战方面的新用途和新技术[1]。现阶段对无人作战飞机空战的研究还主要局限于理论和技术领域,但随着理论的逐渐成熟和技术的突破,研究重点必将逐渐转向作战应用层面。
针对无人作战飞机战术决策问题,现阶段常用的方法有微分对策[2]、粗糙集[3]、贝叶斯网络[4]、群智能算法[5]、动态规划[6]等方法。文献[7]使用影响图对一对一空战条件下的飞行员决策进行仿真和分析。在决策模型中,为每个改变空战态势的机动动作都赋予了概率和效用值,影响图将总的效用值做概率分布,用来表示机动动作的成功概率,并给出一个合理的机动决策结果。文献[8]对水下航行器规避鱼雷的战术决策问题进行研究,阐述了一种基于模糊逻辑的战术决策方法,并用Python语言对决策过程进行脚本化,在工程应用仿真平台上进行试验。文献[9]将粗糙集与贝叶斯网络相结合,提出一种超视距条件下的空战决策方法。首先基于粗糙集对态势信息特征进行约简,然后利用贝叶斯网络的概率推理能力,对超视距空战战术决策进行概率推理。文献[10]对空战决策的方法进行了综述,比较了微分对策、影响图、专家系统等方法在空战决策中的应用特点,预测了未来空战决策方法的发展趋势。文献[11]用专家系统解决了无人机空战决策的问题,其决策性能取决于基于专家经验构造的规则库的大小,但随着考虑因素的增多,将会出现组合爆炸的问题。
在漫长的人脑决策机理探究过程中,具有深远影响的是认知和社会心理学领域专家提出的双重加工理论。文献[12]提出的双重加工系统将推理决策过程分为2个阶段:第1阶段为内隐无意识的启发式加工阶段;第2阶段为受意识控制的分析加工阶段。双重加工系统既能支持“人类条件推理具有显著的概率成分”这个特性,又能整合统一人类直觉推理和理性推理,为决策推理系统提供了很好的理论指导。针对无人机空战决策的具体工程问题,本文提出了一种案例推理(启发式加工阶段)与MAX-MIN云推理机制(分析加工阶段)相结合的双层战术决策方案。战术决策过程中,当给定输入后,首先通过检索、匹配案例库中的案例,得到相应的输出。然而,在更多的输入情况下,常常无法完全匹配一个典型案例,或者无法不同程度地同时激活几个典型案例,无法覆盖所有的可能。因此,本文提出了相似度阈值的概念,对案例推理的结果进行评价,若是问题情景和源案例匹配度不高,则转向云模型定性规则推理。云推理过程中,基于云理论对这些确定案例进行抽象,生成用不同粒度的语言值表达的定性概念,并生成代表经验的规则集,构成一条条粒度不同的定性规则。一旦有了这些变粒度的、足够数量的定性规则集合,在一个确定输入条件下就可以激活相应的规则,通过云推理机制,产生不确定性输出,最终实现无人作战飞机空战战术决策。
1 案例推理的启发式决策
飞行员在日常飞行训练和演习中获得了大量宝贵的作战经验,但因飞行员易于提供实际作战案例而难以提供纯粹的知识,故本文选用了只需将作战经验以案例形式完全表达的案例推理方法以实现第一层的直觉决策。案例推理是利用目标案例的提示而得到历史记忆中的源案例,并由源案例来指导目标案例求解的一种策略。案例推理的求解过程一般分为知识表示、案例检索、案例修正以及案例库的维护与更新。本文重点研究可提高推理效率的知识表示形式以及案例检索方法。
1.1 战术决策知识表示
案例推理的基础——案例知识库来源于专家在解决本领域难题时的一些具体做法,本文所使用的战术决策案例库则来自对飞行员实战经验的提取和描述。知识表示是案例库构造的前提,文献[13]对现阶段几种知识表示方法从认知层面、本体层面、实现层面进行了比较,结果如表1所示。

表1 知识表示方法比较
考虑到战术决策知识的复杂、不确定特点等特性,根据表1所示的多种知识表示方法,综合考虑3个层面的各项性能,本文在构建战术决策库时选用面向对象的知识表示方法,其具体表示方法描述如下。
CLASS |
<类名> |<类变量表>|
STRUCTURE
<案例静态结构描述>
METHOD
<案例的操作定义>
RESTRAINT
<限制条件>
END
类名为战术决策案例在系统中的识别标志,具有唯一性;类变量表则为应用于战术决策的特征属性集合,如接近率、相对距离、敌方位和航向等属性;案例静态结构描述则为态势系统获取的上述特征属性的具体描述;案例操作定义则是给出了具体的战术决策结果,如保持当前飞行状态、防御型或进攻型机动、火力攻击或电子战等战术行为;限制条件为UCAV自身性能如速度、高度和过载的极限值等。
1.2 案例检索策略
根据前文所述的面向对象法的知识表示方法,案例推理过程中选用与之相匹配的最近邻检索策略,相似度计算时首先进行结构相似度计算,然后结合属性相似度进行全局相似度计算,从而得出源案例与问题情境的相似度,并与预先设定的相似度阈值进行比较,以判断是否进行第二层基于云推理机制的分析决策过程。
1.2.1 结构相似度计算
结构相似度概念的提出及相似度数值的计算可有效解决关键特征属性缺失的问题,提高了案例推理的效率,其算式为
(1)
式中:Jsim(Q,C)为问题案例Q和源案例C的结构相似度;ωi表示Q和C交集中的第i个属性的权重;ωj为Q和C并集中的第j个属性的权重。
1.2.2 属性相似度计算
根据空战特征属性的特点,属性相似度计算可分为确定符号属性和确定数属性,计算如下所述。
1) 确定符号属性。
(2)
问题案例与源案例的值均为0或1时,则Ssim(s0,sji)=1,其余情况则Ssim(s0,sji)=0。
2) 确定数属性。
欧氏距离为
(3)
式中,zi表示第i个特征属性的取值范围。
1.2.3 全局相似度
(4)
式中:Ssim(Q,C)为Q和C的属性加权相似度;WQ∩C为Q和C交集的权重之和;Ssim(s0,sji)表示Q和C之间第i个属性的相似度。
利用式(1)~式(4)即可实现问题情境与案例库中的源案例进行相似度匹配,得到一定的相似度值。但是案例推理不是万能的,其推理结果是否符合实际需求取决于案例库的大小,案例库中案例越丰富,则案例推理的效率越高。在案例库大小一定的情况下,需要设置相似度阈值,以免得到相似度过低而不符合实际需求的推理结果。当问题案例与源案例的相似度小于相似度阈值时,则第1层直觉决策失败,遂进行第2层分析决策,据此,可提出UCAV战术总体决策框架,如图1所示。
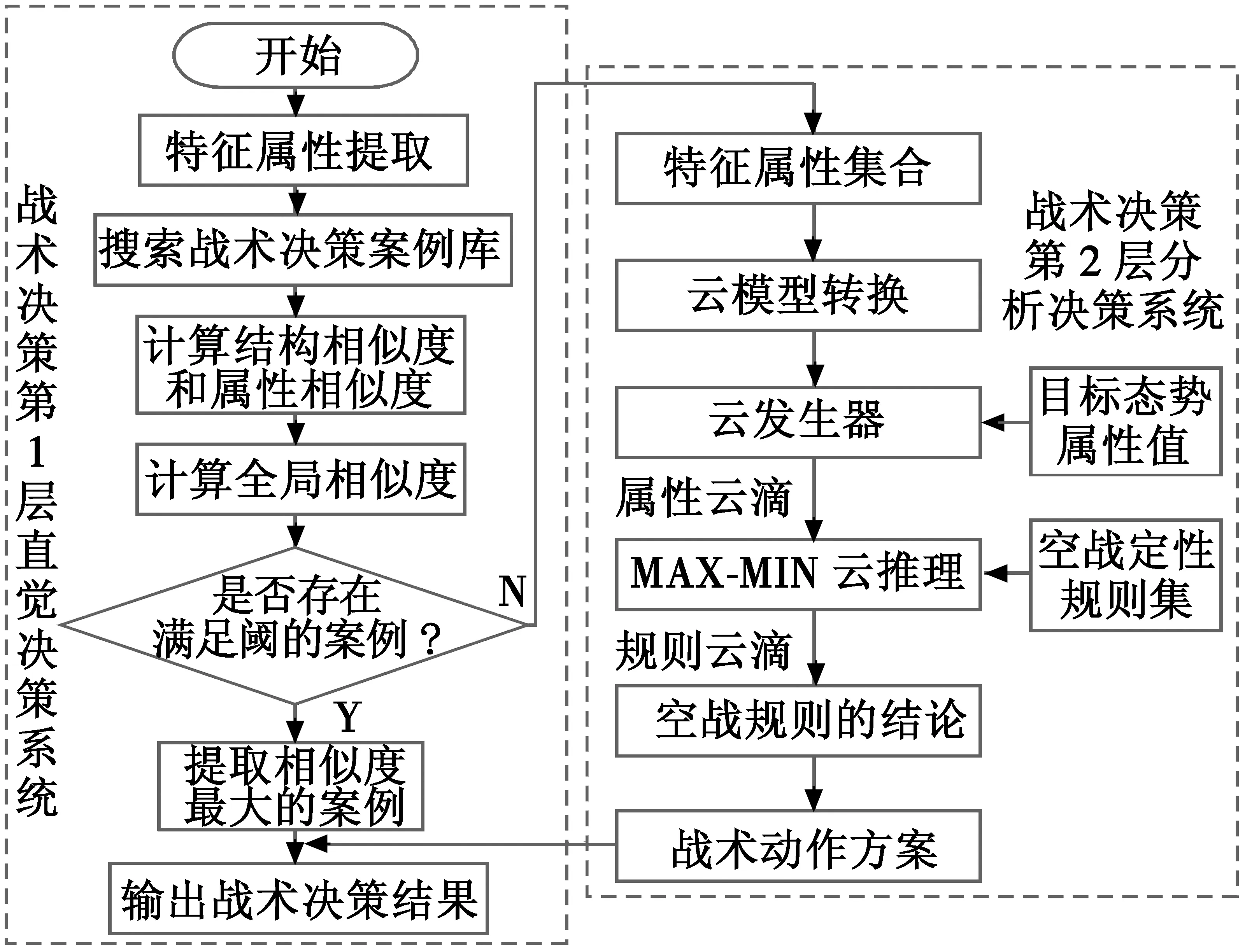
图1 UCAV战术总体决策框架Fig.1 Overall decision-making framework of UCAV tactics
2 MAX-MIN云推理的分析决策
2.1 云模型及云发生器
2.1.1 云模型
设U为一个用精确数值表示的定量论域,C为U上的定性概念,若定量值x∈U,且x为定性概念C的一次随机实现,x对C的确定度μ(x)∈[0,1]是已有稳定倾向的随机数
μ:U→[0,1]∀x∈Ux→μ(x)
(5)
则x在论域U上的分布称为云,每一个x称为一个云滴,如图2所示。
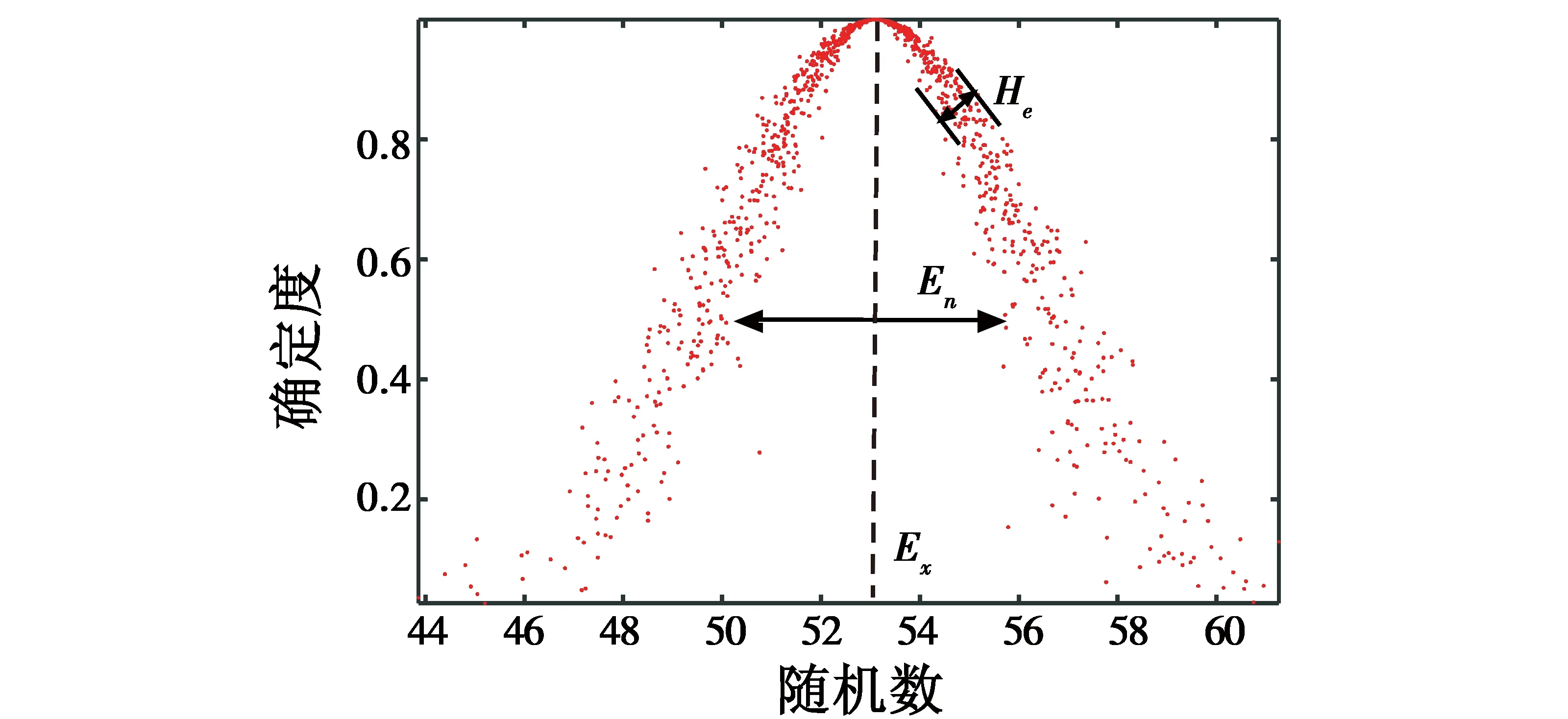
图2 云模型数字特征示意图Fig.2 Digital features of cloud model
期望(Ex)是云滴在论域空间分布中的数学期望,是能够代表定性概念的点[14];熵(En)是定性概念的不确定性度量,决定了论域空间中可被概念接受的云滴的不确定度;超熵(He)是熵的不确定性度量,对于一个常识性概念,被普遍接受的程度越高,超熵越小。
2.1.2 云发生器
云发生器可实现定性概念与定量数值之间的转换。云发生器分为前件云发生器和后件云发生器,前件云发生器实现从定性概念到定量值的映射,后件云发生器实现定量值到定性概念的转化[15]。本文主要用到的是前件云发生器。
对于精确量值论域中任意一个定量值a,通过正向云发生器得到属于定性概念的确定度μ(a),称为前件云发生器,如图3所示。
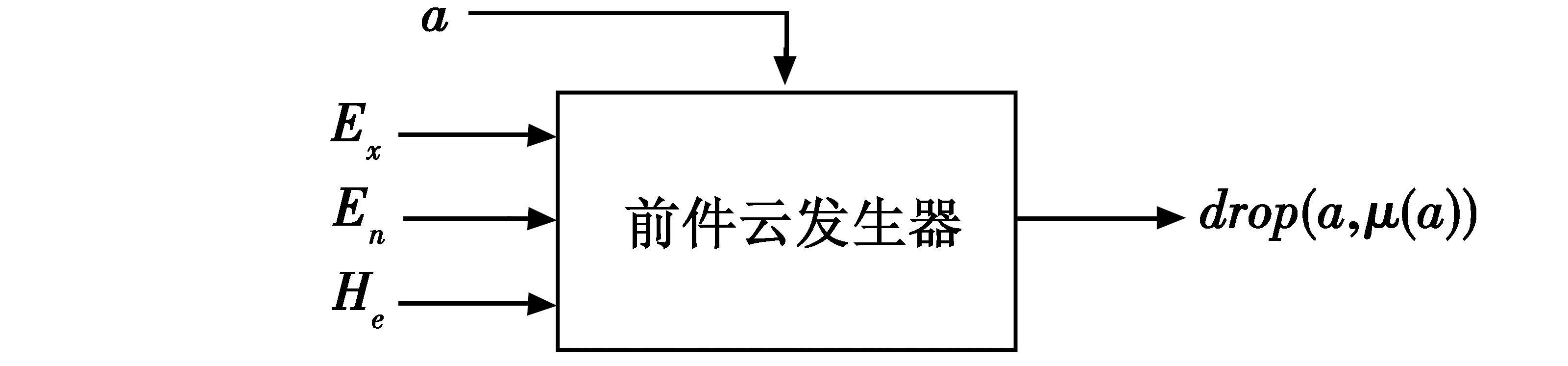
Input:数字特征(Ex,En,He) Output:云滴drop(x,u)图3 前件云发生器Fig.3 Forward cloud generator
前件云发生器的实现算法为:


2.2 战术决策云推理机制
基于MAX-MIN云推理的UCAV战术决策方法如图1所示。首先,在态势获取的基础上,对推理所需的特征属性利用前件云发生器进行云模型转换以生成属性云滴;其次,结合空战定性规则集,采用MAX-MIN云推理算法得到规则云滴,进而得出战术动作方案。
2.2.1 云模型转换
将关键因素集合中的特征属性进行云化,从而构建特征属性云模型,是UCAV在空战过程中利用基于自然语言描述的定性空战规则进行战术决策的前提。以相对距离为例进行说明,设定此特征属性对应的精确量值论域为[0,150],将其划分为[0,30],[30,80]和[80,150](单位:km)3个子论域,并分别对应近、中、远;设定“近”语言值(CD1)的数字特征为(15,8,0.5),“中”语言值(CD2)的数字特征为(55,15,1),“远”语言值(CD3)的数字特征为(115,20,1),相对距离概念云族如图4所示。
依据现代空战常识,将关键因素集合中的特征属性进行论域划分,并设置不同语言值的数字特征,以构建所有特征属性的云族用于后期推理过程。
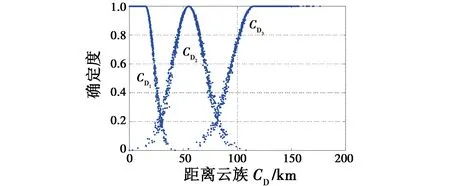
图4 相对距离云族Fig.4 Relative distance cloud family
2.2.2 MAX-MIN云推理方法
推理规则的形式为ifAthenB,A为规则的前件,即被触发的前提,可以是单个条件或多个条件,B为规则的后件,表示具体的战术决策方案,前件和后件中的概念都可能存在不确定性。
设定特征属性的数量为m,Ti(vj)表示特征属性i的语言值为vj,j=1,2,…,Ni,则推理算法可以形式化表示如下。
规则1ifT1(v1),T2(v1),…,Tm(v1) thena1
规则2ifT1(v1),T2(v1),…,Tm(v2) thena2
⋮
规则lifT1(vj),T2(vi),…,Tm(vk) thenal
⋮
其中,推理规则l中的下角标j,i,k分别表示相应的特征属性的自然语言值序号,j=1,2,…,N1;i=1,2,…,N2;k=1,2,…,Nm;al表示战术动作方案集中第l个战术方案。
设态势获取系统提供的信息为q1,q2,…,qm,基于图1,可得MAX-MIN云推理过程如下所述。
1) 将各个特征属性的qi作为前件云发生器的输入,求qi属于特征属性Ti的确定度μTi(qi),即
μTi(qi)=max{μTi(v1)(qi),…,μTi(vj)(qi),…},
j=1,2,…,Ni
(6)
式中,μTi(vj)(qi)为信息qi对特征属性Ti各个论域的确定度。在μTi(qi)确定后,保存该特征属性对应的语言值以及其在战术规则集中的位置。
2) 根据推理算法确定战术规则,并得到该规则相对应的确定度μ*。μ*满足
μ*=min{μTi(Va)(qi),…,μTi(Vc)(qi),…}
(7)
其中,a,…,c表示各个特征属性的语言值序号。μ*确定后,根据{μT1(Va)(q1),…,μTi(Vc)(qi),…}对应的语言值确定推理选定的规则位于规则集中的位置。至此,基于云推理的分析决策结束并得到了相应的战术决策方案。
3 仿真及验证
基于Matlab GUI平台对本文设计的基于案例推理和MAX-MIN云推理的双层战术决策策略进行仿真分析验证。UCAV关键因素集合中特征属性的云模型设置如表2所示。

表2 云族数字特征
对于敌雷达是否锁定,武器是否发射以及敌方是否电子干扰等态势情况属于0-1的二值特征属性,不存在模糊属性,不需要云化,云推理过程中直接进行推理即可。
假设无人作战飞机态势获取系统可以得到本文仿真中所需特征属性的态势值。仿真时设定空战态势如图5所示。首先进行第1层基于案例推理的直觉决策,案例推理过程中的相似度阈值预设为0.8。通过案例检索,选取相似度最高的案例,相似度为0.935 65,大于预设的相似度阈值,因此不必进行第2层分析决策过程,直接给出战术决策结果为“电子干扰,拉起,前向超视距接敌”。

图5 案例推理战术决策方案Fig.5 Case-based tactical decision-making scheme
设定空战态势如图6所示,经过第1层基于案例推理的直觉决策可得问题情境与源案例的最大相似度仅为0.653 42,小于相似度阈值,不符合要求,遂进行第2层基于MAX-MIN云推理机制的分析决策,通过MAX-MIN云推理得到与态势最匹配的战术定性规则为释放箔条干扰弹,摆脱锁定,机动规避电子干扰,并可得确定度为0.712 35,耗时为0.054 2 s,理论上满足时间约束要求。通过分析可知,基于MAX-MIN云推理得到的战术决策结果符合人在回路中参与决策的思维逻辑,证明了此种方法的有效性。
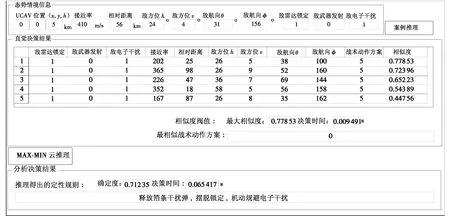
图6 MAX-MIN云推理仿真结果Fig.6 MAX-MIN cloud reasoning simulation results
4 结论
为了推进UCAV在实战中的应用,本文提出了案例推理和MAX-MIN云推理机制相结合的双层战术决策策略。战术决策过程中,首先进行基于案例推理的启发式决策过程,在预设的相似度阈值的指导下对案例推理的结果进行评价。若是问题情境和源案例的匹配度低于相似度阈值,则转向基于MAX-MIN云推理方法的分析决策过程。MAX-MIN云推理借助云模型实现了空战规则定量与定性之间的转化,并以关键属性集合中的特征属性为基础,引入MAX-MIN云推理方法实现了UCAV空战战术决策。仿真表明,决策结果符合专家经验,仿真时间满足实时性需求。战术决策方案为UCAV具体机动动作的规划与执行提供了依据,关于具体机动动作的实现将是下一步的努力方向。
参 考 文 献
[1] 刘大臣,贺晨光,王万金.无人机的应用与发展趋势探讨[J].航天电子对抗,2013,29(4):15-17,21.
[2] OSHMAN Y,ARAD D.Differential-game-based guidance law using target orientation observations[J].IEEE Tran-sactions on Aerospace and Electronic Systems,2006,42(1):316-326.
[3] 梅丹,吴文海,徐家义,等.决策影响图在三维空战决策中的应用[J].电光与控制,2008,15(2):66-69,77.
[4] 王晓帆,王宝树.基于贝叶斯网络和直觉模糊推理的态势估计方法[J].系统工程与电子技术,2009,31(11):2742-2746.
[5] 邹志刚,刘付显,夏璐.从时间角度看作战决策同步[J].电光与控制,2013,20(3):25-29.
[6] LINK C,MCGREW J S,HOW J P,et al.Air combat strategy using approximate dynamic programming[C]//AIAA Guidance,Navigation and Control Conference,2008:1-20.
[7] VIRTANEN K,RAIVIO T,HAMALAINEN R P.Decision theoretical approach to pilot simulation[J].Journal of Aircraft,1999,36(4):632-641.
[8] SON M J,KIM T W.Torpedo evasion simulation of underwater vehicle using fuzzy logic based tactical decision making in script tactics manager[J].Expert Systems with Applications,2012,39(9):7995-8012.
[9] 陈军,高晓光,符小卫.基于粗糙集理论与贝叶斯网络的超视距空战战术决策[J].系统仿真学报,2009,21(6):1739-1742.
[10] 傅莉,李伟.战机空战决策方法及分析[J].沈阳航空航天大学学报,2013,30(6):48-52.
[11] GUIERREZ L B,VACHTSEVANOS G,HECK B. An ap-proach to the adaptive mode transition control of unmanned aerial vehicle[C]//American Control Confe-rence,2003:3911-3912.
[12] SHAO G W,SANG N.Regularized max-min linear discriminant analysis[J].Pattern Recognition,2017,66(6):353-363.
[13] 马创新.论知识表示[J].现代情报,2014,34(3):21-24,28.
[14] 李德毅,刘常昱,杜鹢,等.不确定性人工智能[J].软件学报,2004,15(11):1583-1594.
[15] 李德毅,刘常昱.论正态云模型的普适性[J].中国工程科学,2004,6(8):28-34.
猜你喜欢
小哥白尼(军事科学)(2022年1期)2022-04-26
成都信息工程大学学报(2021年5期)2021-12-30
成都信息工程大学学报(2021年6期)2021-02-12
中成药(2018年12期)2018-12-29
测控技术(2018年10期)2018-11-25
军营文化天地(2017年6期)2017-06-28
广东石油化工学院学报(2016年3期)2016-05-17
电源技术(2016年2期)2016-02-27
百科探秘·航空航天(2015年10期)2015-11-07
中国检察官(2015年14期)2015-02-27