无人机分布式飞行控制计算机故障诊断研究
2018-05-18 00:55张榕,陈欣
电光与控制 2018年5期
张 榕, 陈 欣
(南京航空航天大学自动化学院,南京 211106)
0 引言
飞行控制系统的可靠性和安全性一直是航空飞行器的重要研究方向,飞行控制系统包括飞行控制计算机(FCC)、执行机构(Actuator)、传感器(Sensor)以及其他机载计算机(Task Computer)。其中,飞行控制计算机的工作职责是完成无人机的飞行控制任务并对机载设备进行管理和调度,实现资源共享以及数据信息的融合,是空中和地面指挥系统的联系枢纽。目前,无人机的任务数量和复杂度增加、传感器多数据融合以及飞行范围和性能边界增大等对飞行控制计算机可靠性和安全性提出了更高的要求。
飞行控制系统的故障诊断主要分为基于模型、基于知识以及基于数据信号的方法[1]。基于模型的故障诊断方法对被监控系统过程机理和特性的定性描述,可以获得系统运行的状态信息和预测系统未来的动态特性;基于知识的故障诊断方法依赖对系统运行机理、故障特性以及故障行为与成因之间因果关系等先验信息的分析,利用逻辑推理的方法进行故障的检测和分离;基于数据的故障诊断方法对测量到的信号和数据进行分析处理,提取故障信号特征,检测和隔离故障。国内对基于模型的故障观测器有广泛的研究,针对执行机构和传感器的突变故障和渐变故障有了较为成熟的算法[1-6],飞行控制系统各传感器的输出因系统特性而具有内在的一致性,发生故障时会打破内在一致性,奇偶动态方程是能够反映传感器之间内在一致性的数学模型[5,7]。执行机构和传感器故障属于飞行控制计算机外部故障,飞行控制计算机对执行机构的输出控制和传感器的信息接收均由飞行控制计算机内部对外接口完成,执行机构和传感器故障检测无法与此接口故障分离,也无法对飞行控制计算机的内部故障进行检测和隔离。
分布式飞行控制计算机中的各个功能单元独立分开,各部分运行不同的功能程序,将复杂的飞行控制和通信任务进行分离。余度技术可以通过在设计中使用多个相同的功能单元和模块,接收相同的信息,通过余度表决和检测来获取单元的工作状态,但是由于余度资源成本和代价高,一般只在飞行控制计算机内部重要功能单元进行冗余备份。
分布式飞行控制计算机可以在各个单元上使用不同的模型观测器构造相应的模型解析余度,降低软件程序的复杂度,提高飞行控制计算机的可靠性。本文针对传统单一观测器覆盖率不足的问题,提出了一种结合硬件余度和模型观测器的故障诊断方法,提高飞行控制计算机的可靠性和故障诊断覆盖率。
1 分布式飞行控制计算机结构
分布式飞行控制计算机将功能单元独立分开,使用内部总线进行通信。常见的分布式飞行控制计算机余度结构有主从备份模式和多余度表决模式:主从备份模式在同一个时刻,只有一个主单元继续工作,其他单元处于备份状态,只有当主单元故障时,切换至备份单元工作,备份方式分为热备份和冷备份,热备份指主从单元同步运行,冷备份指备份时单元不运行;多余度表决模式需要3个及3个以上的相似单元同步运行,对各个单元的输出信息继续表决,多数一致作为正确信息。
本文所研究的分布式飞行控制计算机包含了中央处理单元(CPU)、串行通信单元(SIO)、模拟量接口单元(AIO)以及开关量接口单元(DIO)[8],如图1所示。

图1 分布式飞行控制计算机结构图Fig.1 Structure of distributed flight control computer
CPU为分布式飞行控制计算机的主控制单元,主要功能为控制结算、外围设备管理等,是飞行控制计算机的核心单元;SIO负责接收与发送机载和地面串行通信量信息;AIO包含A/D输入模块和D/A输出模块,负责采集模拟量信息、输出控制指令到舵回路;DIO包含D/I输入模块和D/O输出模块,负责采集机载设备状态信息及输出开关控制指令。飞行控制计算机中央处理单元采用三余度配置,串行通信单元和模拟量单元采用双余度配置,计算机内部总线采用四余度配置。
2 飞行控制计算机故障模型
飞行控制计算机与传感器系统、舵回路和其他机载系统之间的信息流如图2所示。

图2 飞行控制计算机与外部设备连接与信息流示意图Fig.2 The connection and information flow indication between flight control computer and external device
本文将飞行控制计算机的故障分为分布式单元功能故障和单元功能模块故障:分布式单元功能故障为板卡级,表示板卡单元已经无法正常工作;单元功能模块故障为功能部件级,表示单元上某个功能模块无法正常工作,但不影响单元上其他的功能模块。
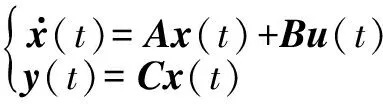
飞行控制计算机模拟量控制模块与执行机构进行数据交互,串行通信接收传感器信息,两者发生故障会影响执行机构和传感器的正常运行,模拟量控制模块的D/A和A/D通道故障和传感器串行通信通道有恒偏差、突变及渐变故障等类型,如图3所示[3]。
图3 故障类型示意图Fig.3 The chart of fault types
飞行控制计算机与外部设备接口信息需要能够检测出图3所示的故障类别,以便让控制器进行故障调节,使得故障不会影响飞行器的安全飞行。
3 基于模型观测器的故障诊断
设某控制系统的动态方程为
(1)
式中:x(t)∈Rn,u(t)∈Rm,y(t)∈Rp分别为系统的状态向量、输入向量和输出向量;A,B,C分别为已知的适维矩阵;(A,C)为可观测对。
执行机构和传感器等故障可分为加性故障和乘性故障,本文以加性故障为例,执行机构控制链路故障模型和传感器通信故障模型分别为
(2)
(3)
式中:E和D为适维矩阵;fa(t)为系统的执行机构故障;fs(t)为系统的传感器故障。
执行机构控制故障观测器[3]为
(4)
令
(5)
传感器通信故障观测器为
(6)
令
(7)

执行机构误差动态方程表示为
(8)
传感器误差动态方程表示为
(9)
突变故障和渐变故障的故障估计算法分别为
(10)
(11)
式中:Γ为适维矩阵,表示故障估计的学习率;F为故障估计的适维矩阵。文献[3]描述了运用线性矩阵不等式求解故障观测器矩阵L和H的方法,文献[3-4]描述了基于式(10)故障估计算法的观测器,此算法能够提升故障估计的性能。
4 分布式飞行控制计算机故障诊断
4.1 通信总线故障诊断
分布式飞行控制计算机内部单元之间通过总线通信进行心跳检测算法实现分布式单元的故障检测,可以分为Push方式和Pull方式[9],两种方式按照一定周期ΔT发送状态检测帧来检测单元的状态。Push方式是被检测单元主动向主控制单元发送状态帧,Pull方式是由主控制单元向被检测单元发送状态检测帧,被检测单元接收到检测帧后,向主控制单元发送状态检测应答帧。采用余度结构的飞行控制计算机,各个余度之间使用多机表决方法检测主控制单元的故障,避免因为主控制单元故障影响其他单元的心跳检测。Pull分布式结构心跳检测方法如图4所示。
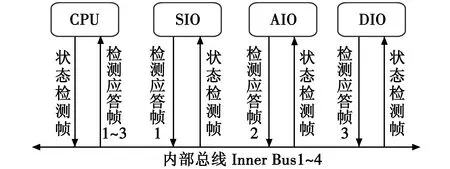
图4 Pull分布式结构心跳检测方法Fig.4 Pull heartbeat detection method for distributed structure
飞行控制计算机内部通信总线采用四余度配置,一路总线是主通信通道,另外三路进行热备份,优先级固定。每条总线上都使用心跳检测方法检测总线上的节点通信是否正常。
CPU单元发送状态检测帧,开始周期计数,在接收检测应答帧后,清除相应单元的周期计数,一旦计数超过预先设计的阈值,判定单元与CPU节点通信故障,当判定CPU节点与其他节点均通信故障,则认为总线故障,按照优先级切换至备份总线通道工作。
通信总线的故障诊断阈值可以根据实际的系统确定,飞行控制系统对控制输出的实时性要求较高,阈值不能超过飞行控制的周期,一般飞行控制计算机控制周期为20 ms,通信总线心跳检测周期为5 ms,因此进行周期计数时,设计的阈值不能超过4。由此得出通用心跳检测阈值的条件,设飞行控制的控制周期为T,通信总线心跳检测周期为Th,心跳检测阈值设计条件为0<μ≤T/Th,在此区间的取值不同会影响心跳检测的灵敏度。
4.2 主控制单元输出表决故障诊断
飞行控制计算机的主控制单元采用三余度配置,故障诊断所采用的输出表决结构如图5所示。
图中:CPU单元运行执行机构控制故障观测器Ob_a(U,Y),U和Y分别表示观测器控制输入和传感器反馈信息,用 (Ua,Ub,Uc)和YsM表示,(Ua,Ub,Uc)分别为CPU-A,CPU-B,CPU-C解算出的控制数据;Ur为进行三余度表决输出的控制解算数据,且Ur∝{Ua,Ub,Uc}。
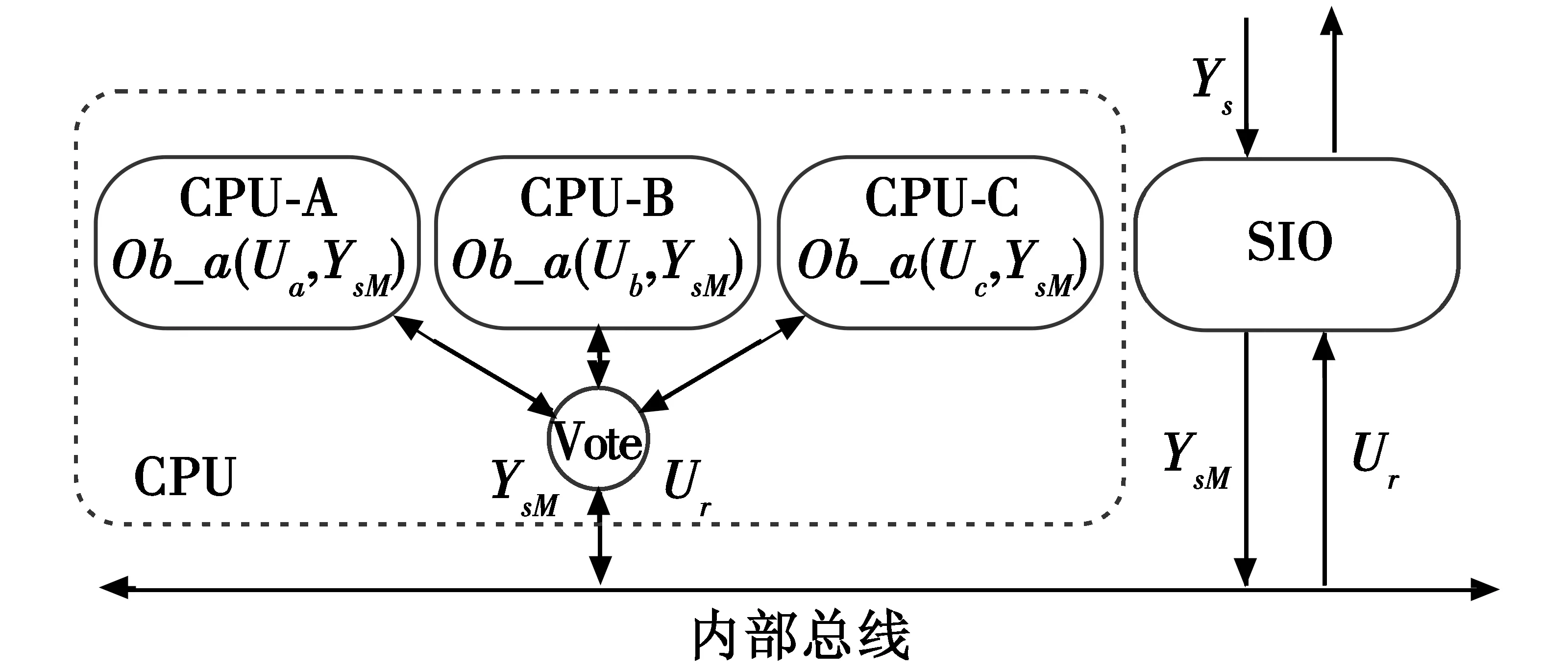
图5 主控制单元输出表决结构图Fig.5 Output voting structure of main control unit
三余度CPU单元输入相同的传感器信号Ys,在主控制单元中进行三余度控制解算或者执行机构故障观测器的余度表决。常见的余度表决方法有多数一致表决法、加权平均表决法以及中值表决法等[10],系统按照表决结果进行主控制CPU单元的切换。
4.3 功能单元外部设备接口故障诊断
串行通信单元采用硬件双余度输入表决和传感器通信故障观测器组成多余度故障诊断结构,见图6。
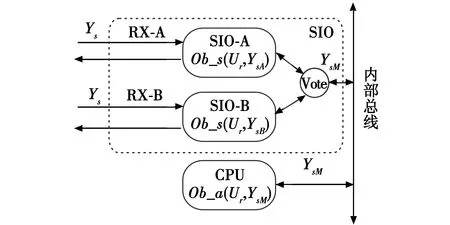
图6 串行通信单元故障诊断结构图Fig.6 Fault diagnosis structure of serial communication unit
图中:串行通信单元运行传感器通信故障观测器Ob_s(U,Y);反馈回CPU单元的信号为YsM。双余度串行通信单元输入相同的传感器信号Ys,经过串行接口输入为YsA,YsB,两者组成主从备份方式,配合使用观测器Ob_s(U,Y)解析余度,在主串行通信单元中形成四余度形式,并依据YsA,YsB以及Ob_s(U,Y)结果进行串行通信接口的故障诊断。
如表1所示:序号1~4表示两组的串行接口输入相同,且两者故障模型观测器输出故障信息时,执行机构处于故障状态,两者故障模型观测器输出信息不相同时,将非故障单元的信息作为YsM;序号5~7表示两组的串行接口输入不相同,可以判断单元接口故障;只有序号8无法确定具体故障单元,需要与CPU单元进行交互判断。
表1中:×表示观测器输出判别为故障状态,√表示观测器输出判别为无故障状态,下同。
模拟量单元采用双余度与执行机构冗余备份结构,结构如图7所示。

表1 串行通信单元外部接口故障诊断
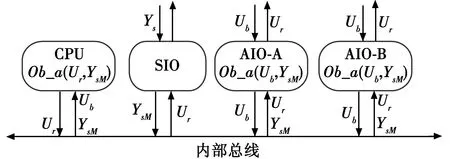
图7 模拟量单元接口故障诊断结构图Fig.7 Fault diagnosis structure of analog unit interface
图7中,CPU单元运行执行机构控制故障观测器Ob_a(U,Y),观测器控制输入为CPU单元解算控制数据Ur。模拟量单元运行执行机构控制故障观测器,观测器控制输入为执行机构反馈控制数据Ub,飞行器传感器状态为YsM。模拟量单元使用观测器组合方式诊断模拟量单元内部A/D,D/A功能模块故障和执行机构故障。
如表2所示,依照CPU单元故障观测器和模拟量单元故障观测器结果的不同组成4种判断结果,能够有效覆盖无故障状态和3处故障定位,并且根据故障估计算法来估计故障类型,反馈回主控制单元,进行相应的故障调节。
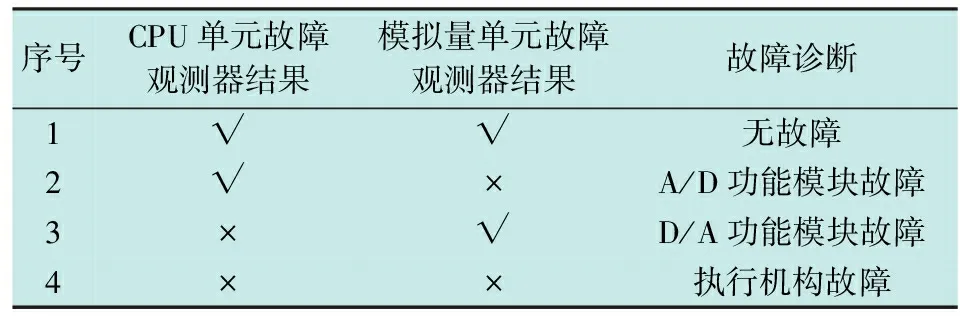
表2 模拟量单元外部接口故障诊断
5 仿真实例
考虑飞行器纵向运动方程

状态向量x(t)由俯仰角速率q、真空速vt、迎角α和俯仰角θ组成。控制输入u(t)由推力TN和升降舵偏角δe组成。以执行机构故障为例,故障发生在控制输入通道,因此E=B。式(10)中自适应学习率Γ取值为diag(2,2),由3节描述的模型观测器方法计算得出
假设恒偏差故障发生2 s处,幅值为
(12)
假设渐变故障发生2 s处,变化率为
(13)
以升降舵偏角δe为例,恒偏差故障估计的仿真结果如图8所示。
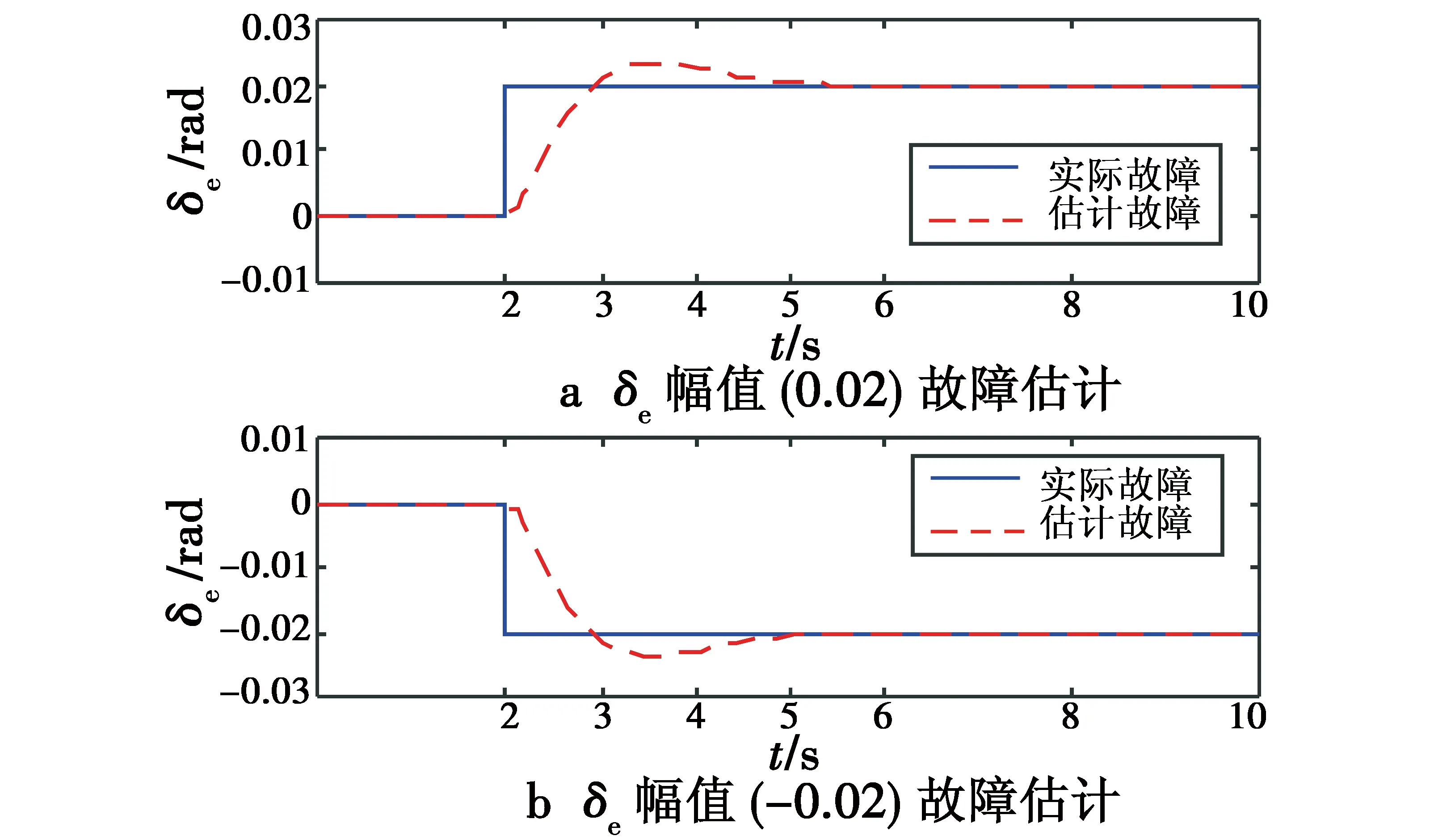
图8 执行机构恒偏差故障及故障估计曲线Fig.8 Curves of constant deviation fault and its estimated value
以升降舵偏角δe为例,渐变故障估计的仿真结果如图9所示。
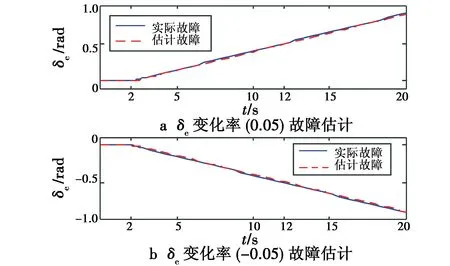
图9 执行机构渐变故障及故障估计曲线Fig.9 Curves of time-varying fault and its estimated value
由图8和图9可以看出,故障发生于2 s处,δe恒偏差故障估计时间为3~4 s,渐变故障估计为±0.05,模型观测器故障估计算法可以较好地对恒偏差故障及渐变故障进行跟踪和估计,与执行机构相关联的飞行控制计算机模拟量单元外部接口A/D,D/A功能模块故障,通过本文提出的故障诊断方法和模型观测器组合结构,按照表2总结的模拟量单元诊断表格进行A/D,D/A功能模块故障以及执行机构故障的检测和分离。
6 总结
本文以分布式飞行控制计算机为对象,提出了一种硬件余度和模型解析余度相结合的方法,该方法可以对计算机外部传感器、外部执行机构以及计算机内部功能模块进行故障诊断。针对飞行控制计算机传感器接口、执行机构接口故障无法与传感器故障和执行机构故障分离的问题,使用组合观测器的方式进行飞行控制计算机外部设备接口的故障诊断。本文方法能够有效进行飞行控制系统中的控制器、执行机构和传感器的故障检测和隔离,解决了传统单一故障观测器无法诊断计算机内部故障的不足,提高了飞行控制系统的故障诊断覆盖率和可靠性。
参 考 文 献
[1] 姜斌,冒泽慧,杨浩,等.控制系统的故障诊断与故障调节[M].北京:国防工业出版社,2009.
[2] 邱静,刘冠军,吕克洪,等.机电系统机内测试降虚警技术[M].北京:科学出版社,2009.
[3] ZHANG K,JIANG B,PENG S.Observer-based fault estimation and accomodation for dynamic systems[M].Berlin:Springer,2012.
[4] 张珂,姜斌.一种改进的自适应故障诊断设计方法及其在飞控系统中的应用[J].航空学报,2009,30(7):1271-1276.
[5] 刘剑慰,姜斌.基于动态奇偶动态空间法的传感器故障诊断[J].控制工程,2012,19(5):870-876.
[6] 冒泽慧,姜斌.基于自适应观测器的MIMO系统执行器故障调节[J].山东大学学报:工学版,2005,35(3):17-19.
[7] 刘剑慰.基于模型的飞行控制系统故障诊断方法研究[D].南京:南京航空航天大学,2014.
[8] 王琴.飞行控制计算机余度管理与总线通信技术研究[D].南京:南京航空航天大学,2012.
[9] 董剑.分布式系统故障检测的关键技术研究[D].哈尔滨:哈尔滨工业大学,2007.
[10] 郑雷.无人机余度飞行控制计算机设计及研究[D].南京:南京航空航天大学,2011.
猜你喜欢
天然气与石油(2022年5期)2022-11-01
天然气与石油(2022年4期)2022-09-21
科技与创新(2021年2期)2021-01-29
西北工业大学学报(2018年4期)2018-09-07
舰船科学技术(2017年11期)2017-11-27
西北工业大学学报(2015年1期)2016-01-19
铁道科学与工程学报(2015年5期)2015-12-24
深空探测学报(2015年3期)2015-12-07
电测与仪表(2015年19期)2015-04-09
导航定位与授时(2014年2期)2014-04-27