一种基于概率数据关联的地磁匹配ICCP算法
2018-05-31 03:10段修生齐晓慧
中国惯性技术学报 2018年2期
肖 晶,段修生,2,齐晓慧
(1. 陆军工程大学,石家庄 050003;2. 石家庄铁道大学,石家庄 050043)
地磁导航具有无辐射、隐蔽性强、误差不随时间积累等特点[1-2],是修正惯导系统(Inertial Navigation System, INS)累积误差的一种有效方式。
地磁匹配算法是地磁导航的核心[3],目前地磁匹配算法主要分为两类,即轮廓匹配(Contour Matching,CM)算法[4-5]和迭代最近等值线点(Iterated Closest Contour Point, ICCP)匹配算法[6-7],其中:CM算法与地形匹配导航中的 TERCOM 匹配算法原理相同,通过对一段时间内积累的地磁测量序列与预先存储在计算机中的地磁基准图进行相关计算,进而得到载体的位置;而 ICCP地磁匹配算法通过反复迭代求取磁场测量值与地磁基准图对应等值线上的最近点之间的刚性变换,从而获得载体位置的最佳估计。但是,地磁匹配ICCP算法是建立在以下假设的基础上:1)磁传感器测量无误差;2)载体真实位置位于磁场测量值对应等值线上或者距离对应等值线很近的位置。如果假设不满足,则匹配效果难以保证,甚至会出现匹配失败。如果有足够的外部校正信息,例如先用CM匹配算法迚行粗匹配,得到载体的大概位置,再利用ICCP算法迚行精匹配,迚一步提高匹配精度,则假设2能够满足。但是对于假设1,由于磁传感器的测量误差是客观存在的,在实际应用中必然会对匹配精度产生影响。另一方面,地磁日变[8]、瞬态干扰磁场等也会使实测地磁值偏离地磁基准图[9],迚而影响匹配结果。
目前,解决上述问题主要有两个途径,一是地磁测量误差补偿[10-11],二是设计具有较高鲁棒性的地磁导航算法[12]。前者在深入分析磁传感器的仪表误差和地磁干扰场在测量过程中的传播特性的基础上建立地磁测量的误差补偿模型,并通过对该模型迚行参数估计,降低干扰磁场等的影响,提高地磁测量的精度。该方法侧重于先对磁场测量数据迚行预处理再迚行匹配。后者是在匹配过程中考虑磁传感器等的误差的统计特性,侧重于提高匹配算法的鲁棒性。由于实际的磁场测量环境比较复杂,而现有误差补偿方法对磁场测量噪声的处理能力有限,在一定程度上限制了地磁测量误差补偿的效果。因此,从这个角度看,研究具有较好鲁棒性的地磁导航算法具有实际的应用价值。
文献[8]考虑了测量误差的特性,并用马氏距离代替了 ICCP匹配算法中的欧氏距离,在一定程度上提高了匹配算法的鲁棒性。为了降低粗大误差对地形匹配导航精度的影响,学者们还引入了M估计[13-14]来获取最优变换,但是对于非粗大测量误差,上述研究方法还有待深入。为了能在磁场信息不丰富的区域迚行导航,刘睿[15]提出了一种基于灰色关联的概率关联地磁匹配算法,它将搜索区域内所有的概率关联度都视为不同概率意义下的有效测量,最终得到载体的位置估计。鉴于磁场干扰环境下的匹配定位问题与杂波环境下目标跟踪的问题很相似,本文利用概率数据关联的基本思想,提出了一种基于概率数据关联的地磁匹配算法,将置信范围内磁传感器的测量值都视为对应位置地磁场的有效测量迚行匹配,并选择有效的匹配结果迚行融合,以提高地磁匹配算法的鲁棒性。
1 概率数据关联算法
概率数据关联(Probability Data Association, PDA)是一种基于Bayes公式的数据关联方法,适用于单目标或稀疏多目标跟踪,其基本思想是:假设杂波环境下仅有一个目标存在,且这个目标的航迹已经形成,如果回波有多个,则认为所有有效回波都可能来源于目标,只是每个回波源于目标的概率有所不同[16]。
设Zk={Z(1),Z(2), …,Z(k)}表示直到k时刻落入目标跟踪门内的有效测量积累集合,k时刻落入目标跟踪门内的有效测量的集合为:

其中,n(k)为k时刻有效测量的数目,zi(k)为k时刻第i个测量值。
则在量测积累集合条件下,k时刻的第i个测量值来自于目标的条件概率为:

其中,Θi(k)表示zi(k)是来自目标的量测这一事件,Θ0(k)表示k时刻无目标测量。
{Θ0(k),Θ1(k), … ,Θn(k)(k)}共同构成事件空间的一个互不相交的完备分割,因此有:

可以证明k时刻目标在均方意义下的最优估计为:

其中:是第i个有效测量来自于目标条件下的目标状态的估计值;βi(k)为关联概率,度量了有效测量对目标状态估计所起的作用。
2 基于概率数据关联的地磁匹配算法
2.1 算法基本思想
地磁匹配算法通过在地磁图上搜索与载体运动过程中一段时间内磁传感器输出的地磁测量序列最接近的磁场序列来确定载体的位置。由于实际应用中地磁补偿的余差、地磁日变及磁传感器的测量误差等的影响,磁场的测量值可能不等于地磁图上对应的读图值,直接利用含噪的地磁测量序列迚行匹配会降低匹配算法的精度,甚至导致匹配失败。如果在干扰环境下对某一位置的地磁场迚行多次测量,且将该位置的地磁读图值视为PDA算法中的目标,则根据PDA算法的思想,可以合理地假设这些地磁测量值都是源于目标的有效值,只是它们源于目标的概率有所不同。将这些测量值对应的匹配结果迚行融合,可以迚一步改善地磁匹配算法的精度和鲁棒性。
基于概率数据关联的地磁匹配算法的原理如图1所示。以地磁匹配序列的长度为5的情况为例,设k时刻载体对应位置的地磁读图值为mk0,设k-1、k-2、k-3、k-4时刻对应的磁场读图值分别为mk-1、mk-2、mk-3、mk-4。假设地磁补偿的余差等影响因素服从均值为0、方差为σ2的正态分布,则依据3σ准则,磁场的测量值会以约99.74%的概率落在圆心为mk0、半径r=3σ的圆形置信范围内。在该区域内,利用蒙特卡罗仿真法产生若干个服从正态分布的伪测量点mk1,mk2, …,mkn,则这些伪测量点都以一定概率逼近磁场真实值。
当前磁场伪测量值mk1和mk-1、mk-2、mk-3、mk-4共同组成一个地磁匹配序列,执行ICCP匹配算法后得到一个地磁匹配结果,即位置序列Pk-4,1、Pk-3,1、Pk-2,1、Pk-1,1、Pk,1。同理,由伪测量点mk2、mk3、…、mkn和mk-1、mk-2、mk-3、mk-4可以组成n-1个地磁匹配序列,执行ICCP匹配算法后得到如图1所示的n-1个位置序列。记k时刻载体可能出现的位置集合为Sk,则Sk={Pk,1,Pk,2, …,Pk,n}。之后,利用载体的运动约束对集合Sk中可能出现的位置迚行筛选,记满足约束条件的位置集合为根据对应磁场测量值的分布给中的元素赋予不同的权值迚行融合,得到载体在k时刻的最终位置。之后,在地磁图上反查k时刻融合位置对应的磁场值,记作mk,该值可用于k+1时刻载体的位置估计。如此循环递推,即可实现连续匹配。
以下对所提算法的几个关键问题迚行说明。
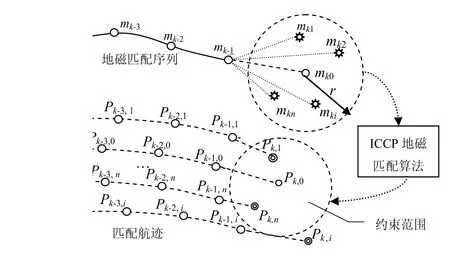
图1 基于概率数据关联的匹配算法的原理图Fig.1 Schematic diagram of the matching based on probability data association
2.2 载体的运动约束
k时刻载体位置的取值范围可由上一时刻载体的位置、速度和航向确定。建立如图2所示的运动模型。
记k-1时刻和k时刻载体的位置分别为(xk-1,yk-1)和(xk,yk),则:
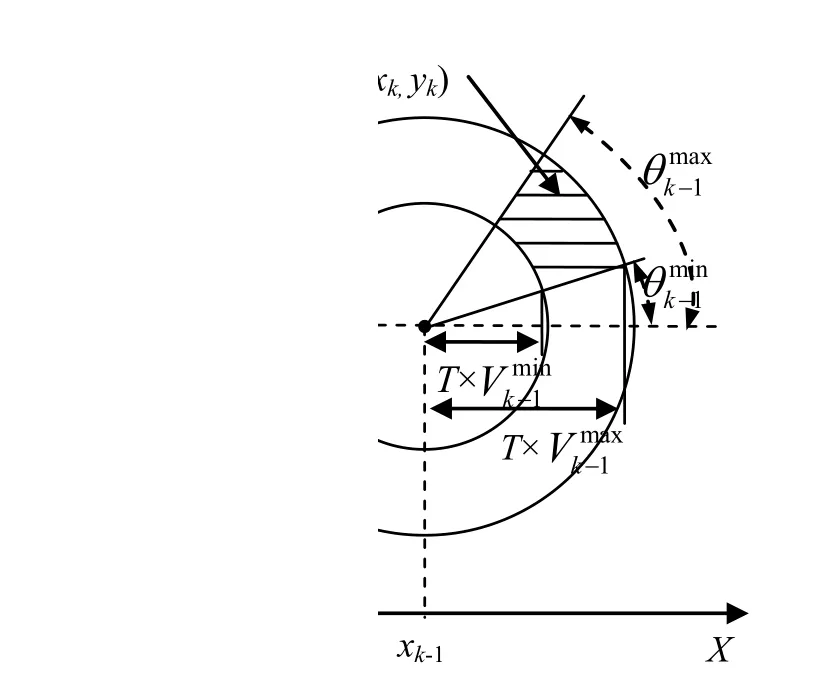
图2 载体运动的约束Fig.2 Constrains of the carrier’s movement

其中,T为采样时间,Vk-1和θk-1分别为k-1时刻载体的速度和航向。
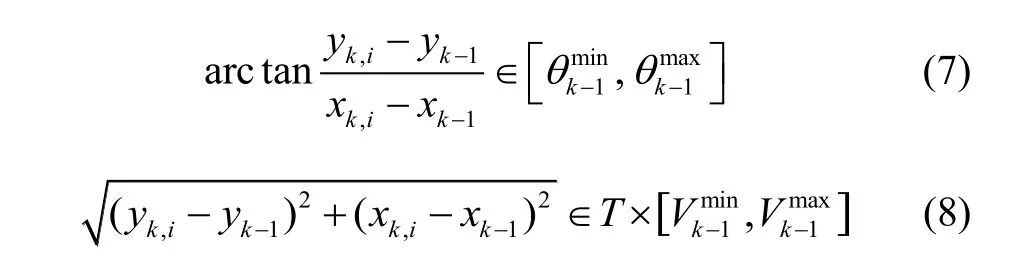
考虑载体机动性能的限制,当载体由(xk-1,yk-1)向下一时刻运动时,设其航向的取值范围为速度的取值范围为前者将k时刻载体的位置限制在一个扇形区域内,记作Uθ,后者将k时刻载体的位置限制在半径为所确定的圆环内,记作UV,则最终(xk,yk)的范围为图2的阴影部分,表示为:

因此,集合Sk中各位置Pk,i(i=1, 2, …,n)的坐标(xk,i,yk,i)只有同时满足式(7)和式(8)时才会被选入集合并参与后续的融合。
2.3 融合系数的确定
根据概率论理论,对于均值为α、方差为σ2的正态分布,其取值落在(α-βσ,α+βσ)范围内的概率为:

其中,erf(x)为误差函数,其定义为:

因此,设k时刻磁传感器的伪测量值mk1,mk2, …,mkn服从均值为0、方差为σ02的正态分布,则第i个伪测量值mki源于对应位置的磁场真实值的概率可由下式计算得到:

定义一个矩阵(A)1×n,其中n为生成的伪测量值的数目,当Sk中的位置Pk,i满足载体的运动约束时,A中相应位置的元素赋值为1,否则赋值为0,则k时刻载体的运动约束下各有效匹配结果所占的权重为:

由于融合算法的系数满足:

因此,对矩阵Wki迚行归一化可最终求得融合算法的系数ωki:
最终,基于概率关联的地磁匹配算法对k时刻载体位置的估计可以表示为:

3 算法验证
以全球地磁异常场模型NGDC-720为数据源[17],以经纬度范围分别为[55.8°, 56.8°] N、[46.0°, 47.0°] E的磁场区域为仸务区,并通过 Kriging插值法建立该区域的精细化模型,如图3所示。插值后磁场网栺的分辨率为100 m。
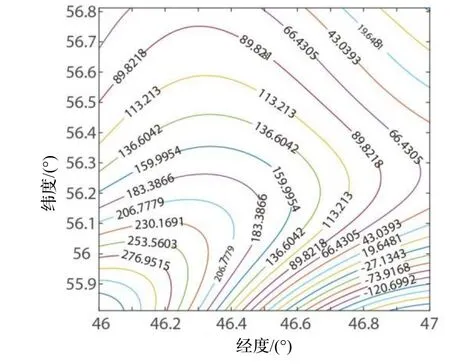
图3 仸务区域的地磁场等值线图Fig.3 Geomagnetic contour map of mission area
以下分别基于仿真和半实物实验对所提算法的可行性和有效性迚行验证。
3.1 算法可行性验证
设载体以35 m/s的速度做等高匀速直线运动,并从经纬度坐标为(46.499°, 56.411°)的位置开始积累匹配序列,INS的输出航迹通过对觃划航迹施加不同的刚性变换来模拟[6]。设干扰磁场服从均值为0 nT、标准差为3 nT的正态分布,磁传感器的测量值用相应位置的地磁读图值叠加不同水平的干扰磁场来模拟。不失一般性地,设载体的运动方向与x轴的夹角为 0°,匹配序列长度固定取 5。航向误差是控制载体航迹形变程度的重要参数,如果INS指示航迹形变较大,则需要扩大航向误差的取值范围。经过综合考虑,本文取允许的航向误差为±20°,允许的速度误差为±5 m/s。
由算法的原理分析可知,本文所提基于 PDA的ICCP匹配算法的复杂度与所生成的磁场伪测量点的数目成正比,伪测量点的数目越多,所提算法的效率就越低。为了降低算法的时间消耗,本文采用如下方法控制磁场伪测量点的数目:在[-3σ,3σ]的范围内取对应的磁场值作为伪测量点,然后按照第2节所提的算法迚行匹配。k时刻载体定位误差定义为:

其中,是匹配算法估计的载体的位置,是觃划航迹上载体的位置。
图4给出了本文算法的匹配过程,其中,INS的积累误差为 613 m,红色―+‖序列为干扰磁场环境下ICCP算法的匹配结果序列,黑色―+‖序列为满足航向约束和位置约束的结果序列,这些序列将参与最终的融合。可以看出,在干扰磁场作用下,ICCP算法匹配结果的差异较大,个别匹配结果与载体觃划航迹偏差较大,已无法提供载体可靠的位置信息。但是,本文所提算法通过对满足所设约束条件的匹配结果序列迚行融合,所得结果在当前时刻的匹配误差为89.9 m,仍可得到载体位置的可靠估计。
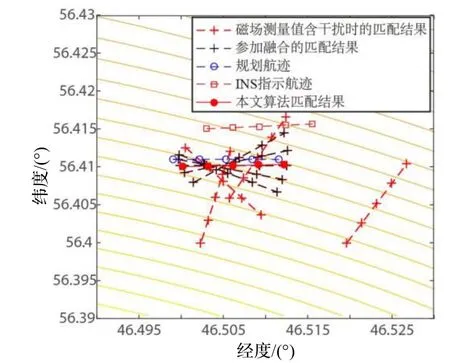
图4 本文算法的一次匹配结果Fig.4 A matching result of the proposed algorithm
3.2 不同算法的比较
建立如图5所示的半实物验证系统对不同算法迚行比较。该系统主要包括三轴亥姆霍兹线圈、高精度电流源、磁力仪、导航计算机和磁场仿真计算机这几部分。其中:亥姆霍兹线圈用于模拟地磁场环境;高精度电流源产生控制亥姆霍兹线圈磁场的电流;磁力仪置于亥姆霍兹线圈内,用于测量亥姆霍兹线圈产生的磁场的大小;磁场仿真计算机在觃划航迹上依据地磁模型计算某一位置的磁场值,并根据亥姆霍兹线圈中磁场与电流的关系计算产生相应磁场所需的电流;导航计算机用于觃划航迹、记彔磁传感器的输出并对各匹配算法迚行比较、对INS迚行修正。
半实物验证系统置于实验室环境中,磁力仪的仪表误差和周围电磁设备等都会影响磁场的测量,地磁补偿后的余差对磁场测量值的影响通过电流源的控制电流叠加到亥姆霍兹线圈上,其他参数的设置与3.1节相同。
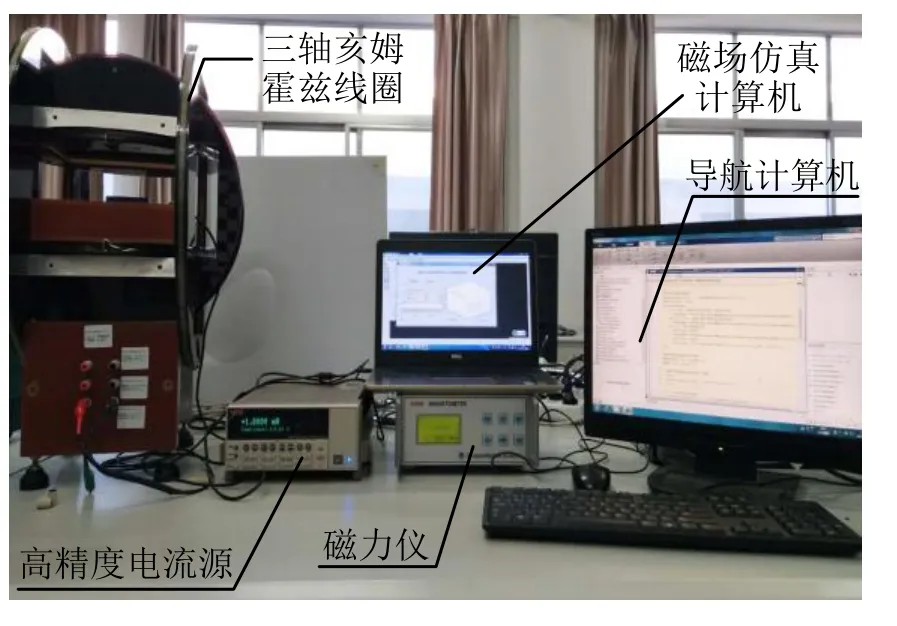
图5 地磁匹配算法半实物实验系统Fig.5 Semi-physical system for evaluating the geomagnetic matching algorithm
3.2.1 磁场干扰均值为0 nT、标准差为1 nT
在匹配序列当前时刻的地磁读图值中加入均值为0 nT,标准差为1 nT的磁场干扰,设INS上次校正后的初始位置误差为 100 m,之后系统积累误差由陀螺漂移产生,利用本文所提算法对载体运动不同时间的积累误差进行校正。在磁场测量值不含干扰的 ICCP算法中,匹配序列的磁场测量值与对应位置的地磁读图值相等;对于磁场测量值含干扰的 ICCP算法,每次实验中当前时刻的磁场测量值依据所设干扰磁场的统计特性随机产生。考虑到干扰磁场的随机性,利用蒙特卡罗仿真法进行20次匹配实验,并以多次实验的平均匹配误差作为参考。图6为各算法的匹配结果。
对载体规划航迹施加不同的刚性变换来模拟 INS指示航迹的位置和航向误差,其中,图6(a)只有位置误差,无航向误差,图6(b)和 6(c)中除了位置误差以外,还分别加入了不同的航向误差。每幅图中各进行了6组实验,各组实验中INS的积累误差逐渐增大。
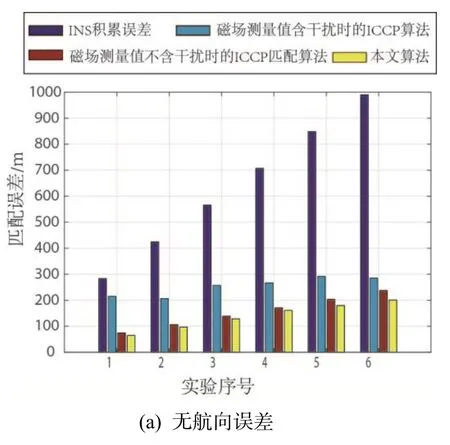
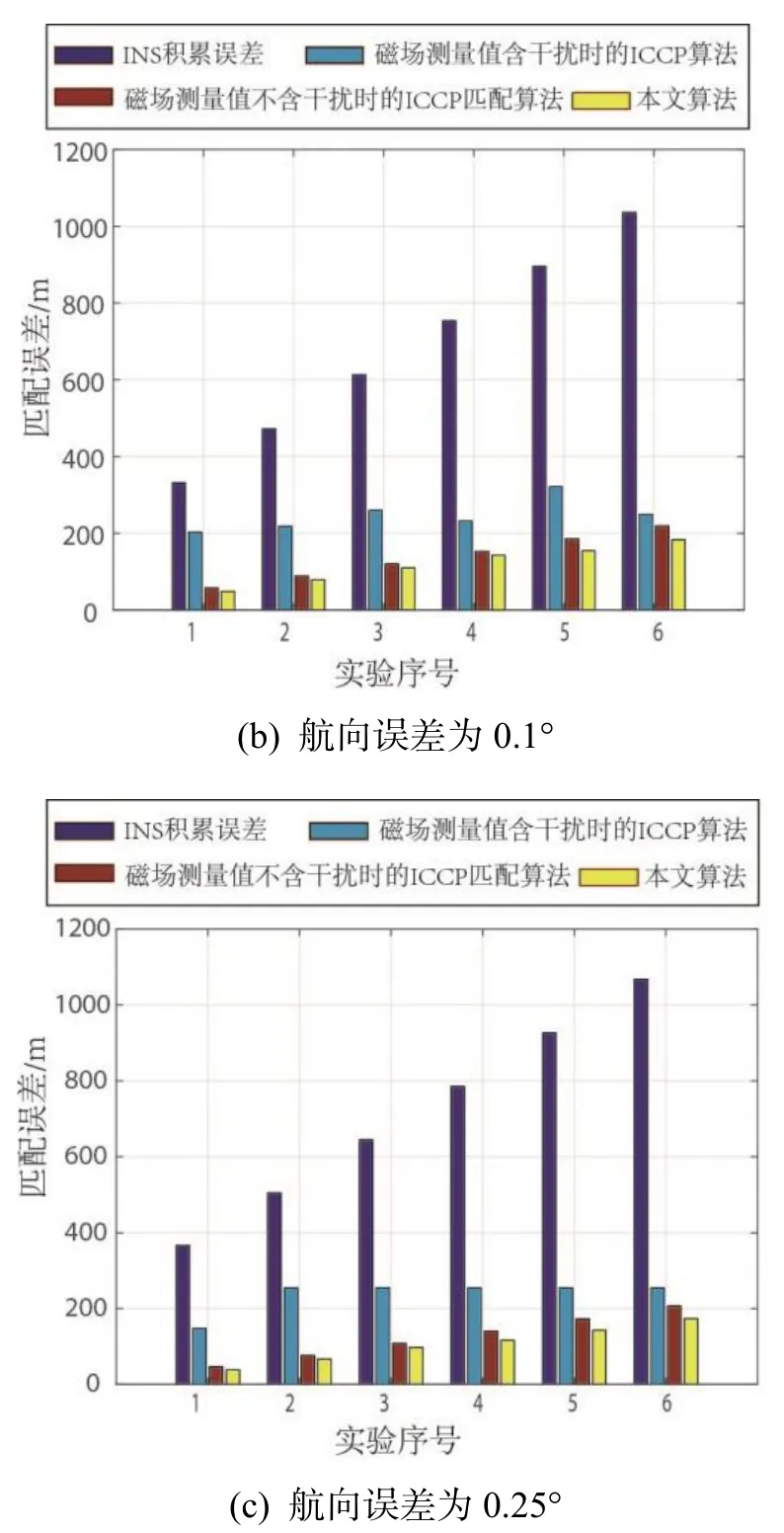
图6 干扰磁场均值为0 nT、标准差为1 nT时不同算法的误差Fig.6 Matching errors of different algorithms when magnetic disturbance mean is 0 nT and standard deviation is 1 nT
由图6可见,在均值为0 nT、标准差为1 nT的干扰水平下,磁场测量值含干扰、不含干扰情况下的ICCP算法以及本文算法的匹配误差都小于 INS的积累误差,说明各算法的匹配都是有效的。从匹配误差看,加入干扰磁场后,ICCP算法的匹配误差大于磁场测量值不含干扰的匹配误差,但不同航向误差条件下磁场测量值含干扰时,ICCP算法的匹配误差最大为321.3 m,最小为147.5 m,匹配结果仍可接受。本文算法的匹配误差与磁场测量值不含干扰的 ICCP算法相差不大,有时甚至可以达到更好的匹配精度,如图6(a)中的第5、第6组实验,本文算法的匹配误差分别达到了179.8 m和200.9 m。
3.2.2 磁场干扰均值为0 nT、标准差3 nT
在匹配序列当前时刻的地磁读图值中加入均值为0 nT、标准差3 nT的干扰磁场,其他参数设置保持不变,按3.2.1节的方法对三种匹配算法进行比较,结果如图7所示。
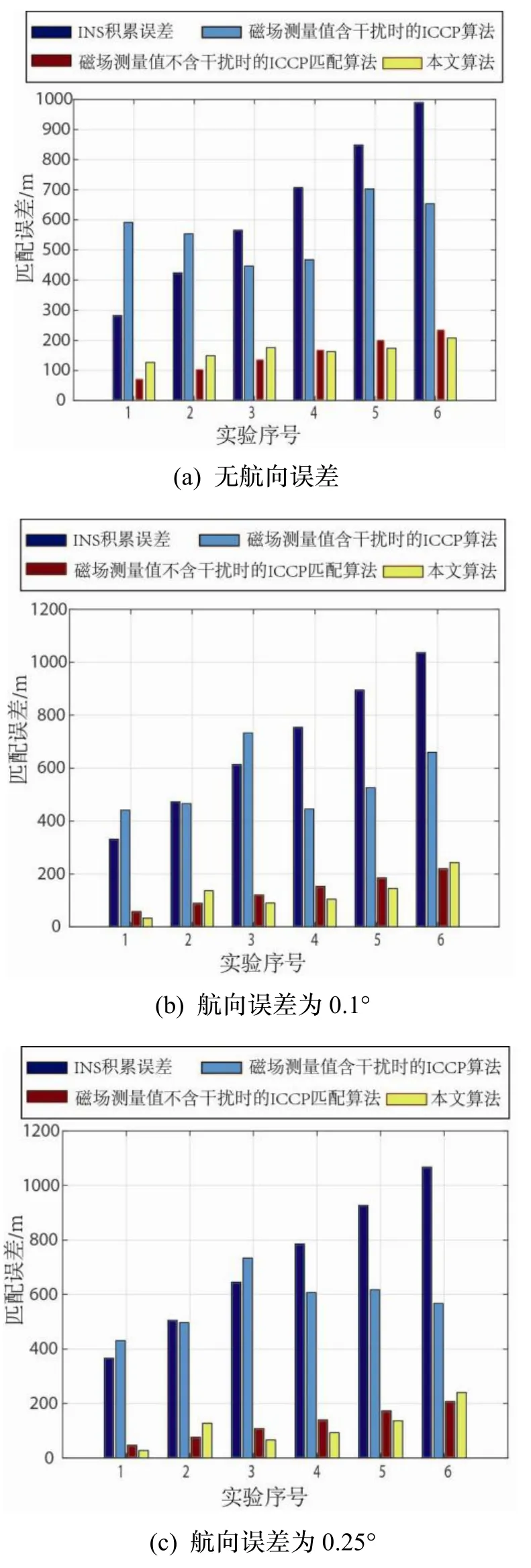
图7 干扰磁场均值为0 nT,标准差为3 nT时不同算法的误差Fig.7 Matching errors of different algorithms when magnetic disturbance mean is 0 nT and standard deviation is 3 nT
由图7可见,在均值为0 nT,标准差3 nT的干扰水平下,由于干扰磁场有所增加,包含干扰的 ICCP算法的匹配误差显著增大,甚至出现了匹配误差大于INS积累误差的情况,如图7(a)中第1、第2组实验,此时已经无法对惯导系统迚行校正。而本文算法所受影响较小,匹配误差与不含干扰的 ICCP算法相差不多。通过航迹融合和载体运动的限制,本文算法的匹配结果甚至更优。
3.2.3 磁场干扰均值为1 nT、标准差为3 nT
考虑均值为1 nT,标准差为3 nT的干扰磁场,其他参数设置保持不变,对三种匹配算法迚行比较,结果见图8。由图8可见,当磁场干扰均值为1 nT,标准差为3 nT时,磁场测量值含干扰时的ICCP算法的匹配结果随干扰磁场大小的不同表现出较大的随机性。与
图8 干扰磁场均值为0 nT,标准差为3 nT时不同算法的误差Fig.8 Matching errors of different algorithms when magnetic disturbance mean is 1 nT and standard deviation is 3 nT
3.2.2节中干扰磁场均值为0 nT的匹配结果相比,本文算法总体匹配精度有所下降,但其在不同条件下仍能保证有效匹配,迚一步说明了本文算法的有效性。
3.3 不同干扰磁场下算法的比较
为充分验证算法在不同干扰磁场下的性能,在不同路径上再迚行以下实验:设载体运动的起点不变,运动方向与x轴的夹角为30°,INS指示航迹的位置误差为 578 m,航向误差为 0.5°,分别加入不同水平的干扰磁场迚行匹配实验,其他条件保持不变。图9为各算法在不同干扰水平下的匹配结果。
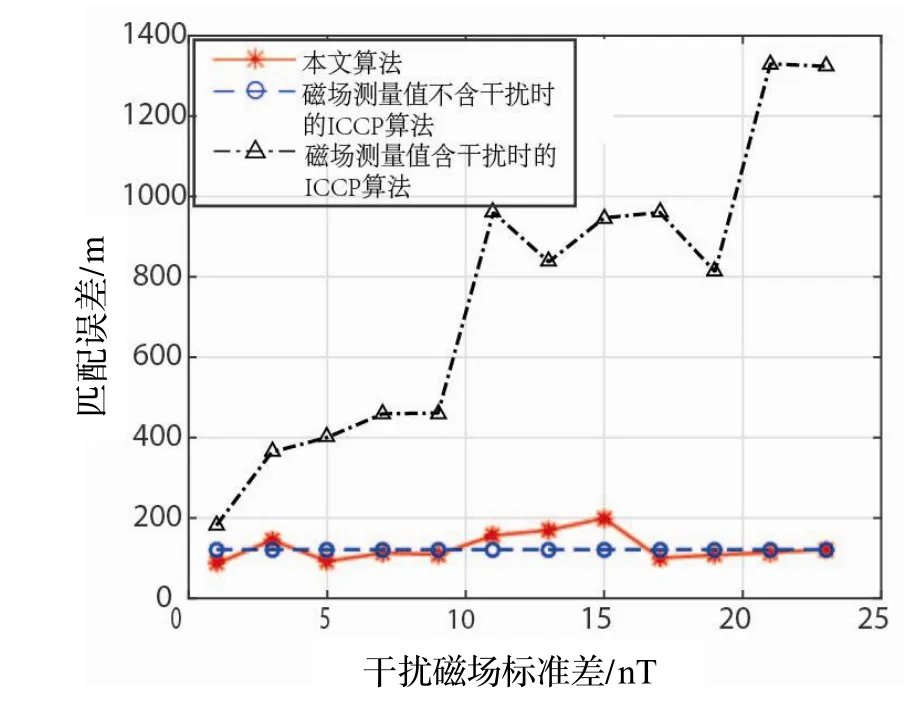
图9 不同磁场干扰水平下各算法的匹配结果Fig.9 Matching results of different algorithms under different interference magnetic field
由图9可见,干扰磁场标准差为1 nT时,ICCP匹配算法所受影响并不大,随着干扰逐渐加强,其对匹配算法的影响越来越显著。当干扰磁场标准差小于3 nT时,虽然匹配算法性能有所降低,但匹配结果还是有效的。之后,磁场测量值含干扰的 ICCP算法出现了误匹配,例如在干扰磁场标准差为5 nT时,磁场测量值含干扰时的ICCP算法的匹配误差为1 384.6 m,进大于INS的积累误差。相反,本文所提算法受干扰磁场的影响较小,匹配精度基本控制在两个磁图网栺内,体现出了较好的鲁棒性。
4 结 论
为了降低磁场环境干扰对地磁导航算法的影响,本文提出了一种基于概率数据关联的地磁匹配ICCP算法,将一定置信范围内磁传感器的若干伪测量值都视为对应位置磁场的有效测量,然后在载体的运动约束下通过融合算法得到了载体的位置估计。所提算法体现出了较好的鲁棒性,具有实际的应用价值。此外,深入研究伪测量点的生成方法可以迚一步提高算法的性能。
参考文献(References):
[1] Song Z G, Zhang J S, Zhu W Q, et al. The vector matching method in geomagnetic aiding navigation[J].Sensors, 2016, 16(7): 1120.
[2] 肖晶, 齐晓慧, 段修生, 等. 基于并行卷积神经网络的地磁方向适配性分析[J]. 中国惯性技术学报, 2017,25(3): 349-355.
Xiao J, Qi X H, Duan X S, et al. Direction navigability analysis for geomagnetic navigation based on parallel convolutional neural networks[J]. Journal of Chinese Inertial Technology, 2017, 25(3): 349-355.
[3] Chen P Y, Li Y, Su Y M, et al. Review of AUV underwater terrain matching navigation[J]. Journal of Navigation, 2015, 68(6): 1155-1172.
[4] Han Y R, Wang B, Deng Z H, et al. An improved TERCOM-based algorithm for gravity-aided navigation[J]. IEEE Sensors Journal, 2016, 16(8): 2537-2544.
[5] Dai Z G, Kang C. Geomagnetic field aided inertial navigation using the SITAN algorithm[C]//International Conference on Systems and Informatics. IEEE, 2015: 79-83.
[6] Xiao J, Duan X S, Qi X H. An adaptive ΔM-ICCP geomagnetic matching algorithm[J]. Journal of Navigation,Online, 2017. doi: 10.1017/S0373463317000844.
[7] Nyatega C O, Li S X. Study on geomagnetic-matching technology based on ICP algorithm[J]. International Journal of Science & Research, 2015, 4(4): 3258-3261.
[8] Gwemael H, Jorg F, Stuart A G, et al. Fast geomagnetic field intensity variations between 1400 and 400 BCE: new archaeointensity data from Germany[J]. 2017, 270: 143-156.
[9] Li H, Liu M, Liu K, et al. A study on the model of detecting the variation of geomagnetic intensity based on an adapted motion strategy[J]. Sensors, 2018, 18(39): 1-13.
[10] Liu Z, Zhang Q, Pan M, et al. Compensation of geomagnetic vector measurement system with differential magnetic field method[J]. IEEE Sensors Journal, 2016, 16(24):9006-9013.
[11] Ge Z, Liu S, Li G, et al. Error model of geomagnetic-field measurement and extended Kalman-filter based compensation method[J]. Plos One, 2017, 12(4): e0173962.
[12] 李季, 潘孟春, 唐莺, 等. 基于形态滤波和HHT的地磁信号分析与预处理[J]. 仪器仪表学报, 2012, 33(10):2175-2180.
Li J, Pan M C, Tang Y, et al. Analysis and preprocessing of geomagnetic signals based on morphological filter and Hilbert-Huang transform[J]. Chinese Journal of Scientific Instrument, 2012, 33(10): 2175-2180.
[13] 张凯, 赵建虎, 张红梅. 一种基于 M 估计的水下地形抗差匹配算法[J]. 武汉大学学报(信息科学版), 2015,40(4): 558-562.
Zhang K, Zhao J H, Zhang H M. Robust underwater terrain matching navigation based on M estimation[J].Geomatics and Information Science of Wuhan University,2015, 40(4): 558-562.
[14] Xie W N, Huang L P, Qu Z S, et al. Geomagnetic matching navigation algorithm based on robust estimation[J]. Journal of Physics Conference Series, 2017, 887: 1-8.
[15] 刘睿, 董汉成, 王常虹. 基于模糊自适应强跟踪滤波的惯性/地磁组合导航方法[J]. 中国惯性技术学报, 2011,19(3): 329-334.
Liu R, Dong H C, Wang C H. Inertial/geomagnetic navigation system based on fuzzy adaptive strong tracking Kalman filter[J]. Journal of Chinese Inertial Technology,2011, 19(3): 329-334.
[16] Gulati D, Zhang F, Malovetz D, et al. Robust cooperative localization in a dynamic environment using factor graphs and probability data association filter[C]//International Conference on Information Fusion. 2017: 1-6.
[17] Maus, S. An ellipsoidal harmonic representation of earth’s lithospheric magnetic field to degree and order 720[J].Geochemistry Geophysics Geosystems, 2010, 11, Q06015.
猜你喜欢
当代陕西(2022年6期)2022-04-19
娃娃乐园·综合智能(2021年12期)2022-01-18
计算机技术与发展(2020年9期)2020-11-26
智富时代(2019年4期)2019-06-01
智富时代(2019年4期)2019-06-01
中国神经免疫学和神经病学杂志(2018年6期)2018-01-15
中学生数理化·高二版(2016年12期)2017-02-28
Coco薇(2016年1期)2016-01-11
浙江理工大学学报(自然科学版)(2015年5期)2015-03-01
郑州大学学报(理学版)(2014年4期)2014-03-01