
摆线针行星机构传输性能数学模型的创建
2018-05-31 01:18冯蕾
西部皮革 2018年9期
冯蕾
(湖北工程职业学院,湖北黄石435002)
1 简介
齿差2K-H摆线针行星机构,由于它的简单、紧凑和自锁性能被广泛应用于汽车座椅调角器中。可是,在应用中,由于组装工序、制造误差、齿廓修饰和润滑条件的影响,调角器机构的实际齿廓不是通常意义上的短振幅外摆线。这样导致节距圆的形状和大小存在微小的变化。严重影响齿形的传输性能,无法满足自锁的性能。本文研究的目的在于找到驾驶时运动学参数的依赖性以及自锁时刻。
2 正传输的性能
正传输在设计时要求当在转动臂H.给予1 Nm的最小力矩,针齿轮b1就能旋转。如果此时输入部件H的力矩>1 Nm,输出力矩必须Mb1>零。
据力学分析,建立如图1所示的直角坐标系。b1为针齿轮旋转中心,Ob为原点。
2.1 转臂H作为隔离体力学建模
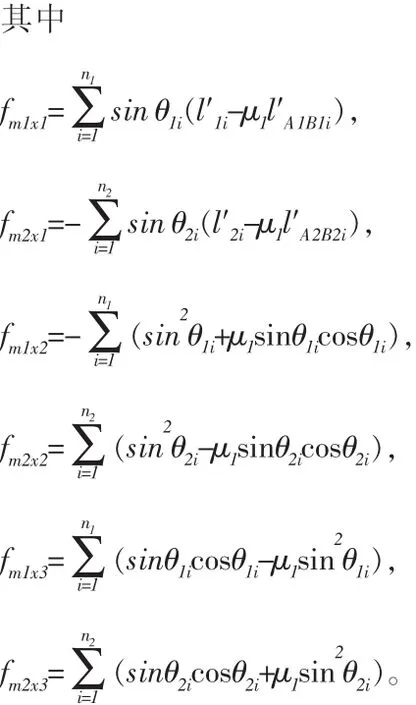
转臂H是一个偏心轮,分析其受力情况如图1所示。包括外力矩TH、支持力FR1、摩擦力 μ2FR1、支反力 Qx和 Qy。假设转臂在做匀速转动,则其力学平衡方程为:

其中,d01为内滚道直径;e=OgOb为轮与针轮中心间的距离;α1为支反力R1与x轴夹角;μ2为径向推摩擦系数。
2.2 联摆轮g1_g2隔离体
设μ1是齿轮副的滑动摩擦系数。联摆轮g1_g2的受力示意图如图2所示。法向力F1i作用于啮合点针齿轮b1,法向力F2i和切向摩擦力μ1F2i,切向摩擦力μ1F1i作用于销齿轮b2的啮合点处,切向摩擦力μ2F2作用于R2与由轴的臂轴承间。
设P1i(i=1 ,2 ,....,n1)和P2i(i=1 ,2 ,....,n2)分别为两对齿轮副b1和g1,在啮合点齿廓公法线方向与转臂的交点为b2和g2;两个共轭对的齿轮之间的实际啮合齿数分别是n1和n2;销齿轮b1和b2的第i个圆柱形啮合元件的中心分别为 Z1i和 Z2i。ObZ1i,ObZ2i与 y 轴的夹角分别是 θb1i和 θb2i。A1i侧是齿轮b1和g1的啮合点。
根据∑MOg=0,∑Fx=0,∑Fy=0,得出三个力学方程为:

其中 l′1i是点 Og到线 P1iA1i的距离。
根据弹性,在针齿轮b1与摆线齿轮g1啮合齿间形成的正应力F1i,将与形变方向的力Fi[13,14]成正比,即:

其中,F1max(本文中简写为Fm1)为b1和g1尺廓啮合间的最大正应力。

与此类似,b2和g2的啮合齿间的正应力 F2i,即:

上述方程代入方程(2),则:
2.3 针轮b1为隔离体
进一步分析针轮b1的受力图,如图3所示。在针轮b1上的作用力包括:法向应力F1i和切向摩擦力μ1F1i,法向作用力R1和切向摩擦力μ2R1。
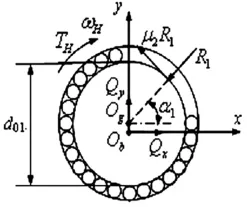
图1

图2
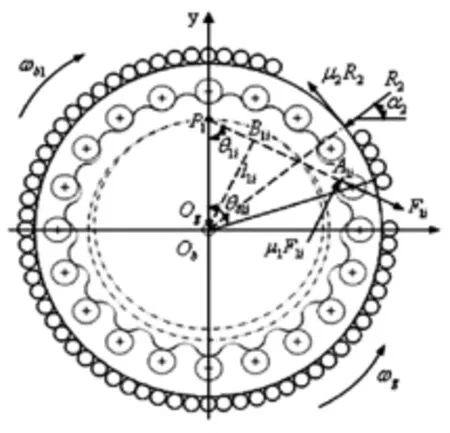
图3

图4
其力平衡方程为:
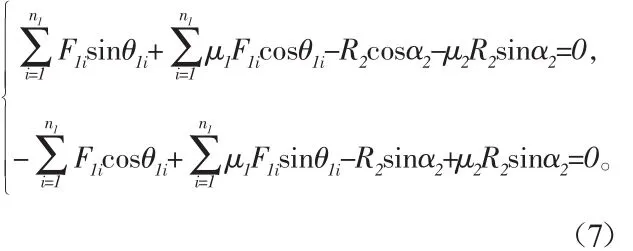
根据公式(4)和(5),则:
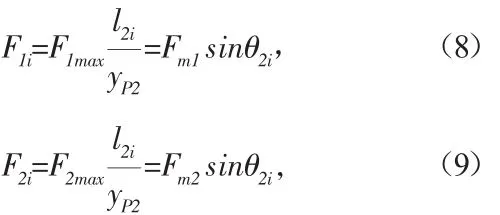
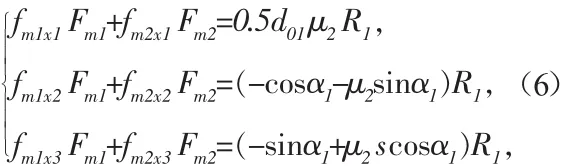
将方程组(7)、(8)、(9)组合,可简化为:
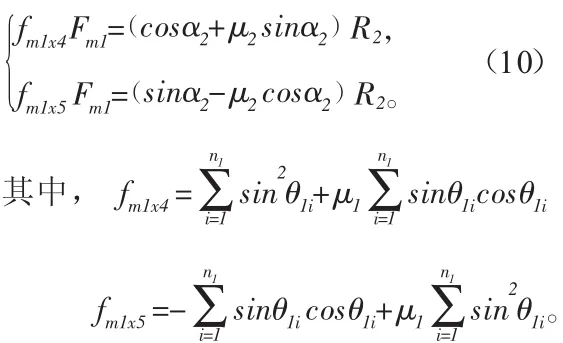
如果要让针轮b1旋转,必须满足以下条件:
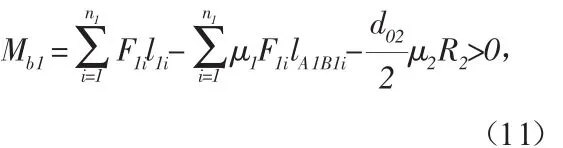
它也可以表示为
首先,从几何关系中找到几何参数。其次,系数可以由所有几何参数代入系数方程来获得。再次,由方程式算出Fm1和R2。最后,求得针齿轮b1的力矩Mb1。
2.4 几何参数
从已知参数如齿轮的齿数算几何参数;圆柱形销齿轮的半径;销齿轮定位中心圆的半径、偏心距。
2.4.1 间隙角 δb1和 δb2
销摆线传动情况如图4所示,其中,实线和虚线分别代表一对齿轮齿形的理论啮合和实际啮合的状态。由此针齿轮在接触摆线轮之前需要从位置D1i到位置C1i转动一个角度 δb1。假设初始间隙符号是 Δ( φ1),如图 4i所示。齿隙是按照下列公式计算:

其中,(xC1i,yC1i)是的坐标。由图4几何关系,(xC1i,yC1i)可被计算如下:
将 离 散 点 的 坐 标 ( x1ij,y1ij)和 表 达 式(14)带入公式(13),得到一个函数:

因此,Δ ( φ1)是 δb1的函数,其中,0≤δb1i
因为粗糙度优于负载引起的形变值,ε由齿廓面的粗糙度决定。
使用二进制搜索方法获得它的数值解,如下表示:
在它们共同的正方向的一个或几对齿廓之间的距离 Δ( φ1)≤一个设计阈 ε而任何其它对之间的距离 Δ( φ1)≥ε。集合 [im1,im2]的元素的数目为n1,也就是在同步啮合情况下牙齿的对数。
代表摆线轮g1实际啮合点的坐标必须满足条件以下:

其中 Δ ( φ1)是 ( x1ij, y1ij)的子集,对于针i齿轮b1的圆柱形啮合齿来说,其相关的中心坐标为 (xZ1i, yZ1i)(i∈ ( 1,n1)),Δ ( φ1)也是i(xC1i, yC1i)的子集。
由于摆线齿轮由线切割机来制造而成 ,这 些参 数 如 δb1,(xA1i, yA1i),( xZ1i,yZ1i)和n1可以通过已知的数值迭代一次后依照加工步骤生产而获得。
类似的方法也可以得到齿轮副b2和b1 的参数 δb2, (xA2i, yA2i), ( xZ2i,yZ2i)和 n2,并加工出齿轮副b2和b1。
3 结论
基于实际啮合传动过程的静态分析,考虑齿轮副之间的摩擦,提出了一个齿差2K-H摆线针行星机构的传输性能的数学模型,。在此理论的指导下,汽车的座椅调角器机构的自锁性能被提高,也为进一步的调查打下坚实的基础。
[1]万志成.六自由度排爆机械臂控制系统设计[D].上海交通大学,2008.
[2]Bar-Cohen,Yoseph,et al.Biologically Inspired Intelligent Robotics.Proceedings of the Academy of Natural Sciences of Philadelphia,2012.
[3]黄纯颖.机械创新设计[M].北京:高等教育出版社,2008.
猜你喜欢
北京信息科技大学学报(自然科学版)(2022年6期)2023-01-12
中学生数理化·八年级物理人教版(2022年3期)2022-03-16
中学生数理化·八年级物理人教版(2022年3期)2022-03-16
汽车实用技术(2021年23期)2022-01-05
中学生数理化·八年级物理人教版(2021年3期)2021-07-22
防爆电机(2021年1期)2021-03-29
组合机床与自动化加工技术(2019年3期)2019-04-08
制造技术与机床(2017年11期)2017-12-18
制造技术与机床(2017年3期)2017-06-23
制造技术与机床(2017年3期)2017-06-23
