高灵敏度GPS信号快速捕获新方法
2018-06-21 00:57杨久东王文军
电光与控制 2018年6期
杨久东,王文军,孙 跃
(华北理工大学矿业工程学院,河北 唐山 063210)
0 引言
全球定位系统(Global Positioning System,GPS)泛指美国于1964年投入使用的一种全球卫星定位系统,它实现了在地球任何地方都可以享用实时、可靠、精确的定位服务,而GPS接收机是其实现精确快速定位的关键。相比于硬件接收机,软件接收机将所有信号处理过程都移植到可编程的微处理器中实现,具有灵活性高、可扩展性强和升级方便等显著优势。例如,要进行算法测试或者当GPS导航电文发生变化时,软件接收机只需对内部的软件程序进行升级,而无需对系统整体进行大的改动,就可以完成这些需求[1-3]。
GPS信号捕获问题是一个在多普勒频率域和C/A码相位域的二维搜索问题[4]。早期GPS接收机通常采用滑动相关捕获算法,该算法是一种串行捕获算法,运算量很大,捕获时间较长[5]。为了提高捕获速度,基于FFT的并行快速捕获框架被提出。并行捕获算法的捕获速度得到很大提升,但这并没有解决弱信号条件下的信号捕获问题[6-8]。文献[9]提出基于分段移位平均周期图的高动态GPS信号捕获算法,实现了低信噪比下大动态范围的GPS信号捕获,但算法的复杂度较高。文献[10]设计了一种并行频域搜索捕获算法,该算法在同一时间对所有码时延进行处理,可以减少运算量,但是其对弱信号的捕获能力较差。文献[11]采用差分相干累积,并引入峰值比作为判决变量,实现了GPS信号的精密捕获。
针对弱信号条件下的GPS信号捕获问题,本文提出了一种兼顾捕获灵敏度与捕获速度的捕获算法。
1 算法原理
进入GPS软件接收机的基带信号可表示为
x(tn)=ADk(tn)Ck[(1+η)(tn-tτ)]cos[(ωIF-ωD)tn+φ0]+v(tn)
(1)
式中:A为信号幅度;tn为采样后的时间序列;Dk(tn)为间隔20 ms在±1中随机取值的GPS导航电文数据;Ck(tn)为卫星的伪随机编码,即要捕获的C/A码;tτ为C/A码的起始码相位;η为多普勒频偏对C/A码相位的影响因子;ωIF为混频后输出的中频频率;ωD为GPS接收机与卫星之间相对运动产生的多普勒频偏;φ0为初始相位;v(tn)为加性高斯白噪声。
为实现信号捕获,首先在软件接收机中生成对应卫星的C/A码信号。将本地信号与GPS软件接收机的中频信号进行相关运算,可得
z(tm)=0.5ADk(tn)R(Δtτ)sinc[Δωdtm]e-j[Δωdtm+φ]+w(tm)(2)

1.1 提高捕获灵敏度

首先对高速采样的接收信号进行分组,然后将分组信号与本地分组信号进行相关运算完成捕获。信号分组如图1所示,采样后每个码片内包含M个采样点,将M个采样点作为一个预设码片,提取各个预设码片的第一个采样点构成第一组信号,依次提取各个预设码片内后续采样点,形成M组接收信号。将本地信号进行同样分组处理后,经过FFT和IFFT获得M组相关结果,对M组相关结果叠加后提取峰值实现信号捕获。
图1 平均分组示意图
Fig.1 Average grouping diagram
假设C/A码为矩形码片,码片宽度为T,当|Δtτ≤Tc|时,C/A码的自相关函数可以表示为
(3)
传统相关捕获算法的码搜索步长通常设为码片宽度的一半[2],此时码片误差|Δtτ≤Tc/4|,C/A码自相关函数损耗为
(4)
当采用平均相关捕获时,假设高精度采样后的码搜索步长是Tc/32,此时码片误差|Δtτ≤Tc/64|,则C/A码自相关函数的损耗为
(5)
相比传统捕获算法,平均相关的自相关损耗大约改善了约2.4 dB。
此外,GPS接收信号中存在多普勒频偏,这不但要求接收机对载频进行步进搜索捕获,而且还会影响C/A码的周期。GPS信号相关捕获过程中,需要对多个C/A码周期进行叠加运算,多普勒频偏就会使得C/A码叠加结果存在误差,影响捕获性能,必须对多普勒频偏进行补偿。
根据多普勒频偏对C/A码相位的关系,对每一个搜索频点,可以按照
(6)
对本地复制的GPS信号进行线性插值,矫正多普勒频偏对C/A码相位的影响。
频偏影响还体现在本地生成信号的频点搜索步长中,即
(7)
自相关峰值与载频误差呈现辛格函数关系,频点搜索步长越小,自相关峰值的误差就越小,但搜索步长减小会导致计算量增加。因此,实际应用中,要综合考虑捕获灵敏度与捕获速度的关系。
1.2 缩短捕获时间
信号捕获过程中,大量、重复且耗时的运算就是相关运算(平均分组后大量的运算仍然是相关运算),因此减少相关运算的计算量就可以降低整个GPS信号捕获的计算量。
首先对需要相关运算的信号进行叠加处理,然后再利用FFT完成相关运算,即采用叠加相关方法。设xp(tn)为平均分组后的某一组需要进行相关运算的GPS接收信号,信号时长为1 ms,y(tn)为本地复制的包含同向载波和正交载波的C/A码信号,则此次相关运算可以表示为
Z(k)=Xp(k)Y(k)
(8)
式中,Xp(k),Y(k)分别表示xp(tn),y(tn)的FFT。
设信号的相关累积长度为P(单位ms),则共需要进行P次相关累加,即
(9)
式(9)表明,只需一次相关运算和少量累加运算就可以取得多次相关运算所取得的结果,显著降低了相关累加的计算复杂度。
此外,降低频率搜索过程的计算复杂度,可以进一步缩短捕获时间。因此,采用频域循环移位代替时域频率步进补偿来降低频率搜索过程的耗时,具体实现方法如下。
接收信号中含有多普勒频偏,需要对接收信号进行频率步进补偿搜索,每个步进补偿频率均需要与本地生成信号进行自相关,频率补偿的接收信号可以表示为
(10)
式中,q为补偿的多普勒频偏。x(tn,q)与本地生成信号自相关的FFT形式可以表示为

(11)
式中,X(k+q)表示信号FFT的循环移位。式(11)表明,对接收信号进行频率补偿等价于信号FFT的循环移位。只需在计算出接收信号的FFT后,对FFT结果进行循环移位就能实现频率步进补偿搜索,可以减少频率搜索过程的时间消耗。
2 算法实现与性能分析
为了进一步提高处理增益,实现弱信号条件下的信号捕获,相干累积、非相干累积和差分相干累积相继被应用到GPS信号捕获中。相干累积能够有效消除噪声,提高捕获灵敏度,且抑制噪声的能力正比于累积时间,是弱信号捕获的最优选择,但由于GPS信号的导航电文数据存在相位跳变,限制了相干累积的时间。非相干累积不受导航电文数据跳变的影响,可以进行长时间累积,但累积中包含非线性运算(平方运算),存在信噪比损耗,对微弱信号捕获性能不佳。差分相干累积利用相邻相关数据的差分值取代非相干累积的平方运算,能够降低噪声影响,且对导航电文数据跳变不敏感,但相邻的相关数据会存在一定的差异,这在信噪比较低时会影响捕获性能。
基于本文提出的改进并行捕获算法,分别采用相干非相干累积方法[9]以及差分相干累积方法[11]进行捕获。其中,相干非相干累积是指首先进行一段相干累积,然后对相干累积结果进行非相干累积。具体的捕获算法实现方案如图2所示。
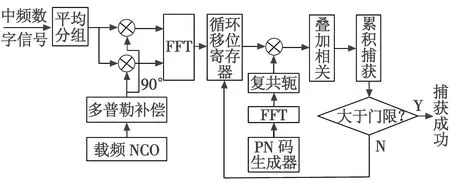
图2 捕获方案流程图Fig.2 Flow chart of acquisition scheme
2.1 弱信号捕获仿真分析

(12)
式中,RS,N表示信噪比,单位为dB。GPS高灵敏度捕获要求能够捕获到信号强度在-188~-174 dBW之间的弱信号,换算为信噪比约为-47~-33 dB之间。
本文提出的改进并行捕获算法与传统并行捕获算法,分别与相干非相干累积方法以及差分相干累积方法结合进行微弱GPS信号捕获测试,各个捕获方法的检测概率与信噪比的关系如图3所示。
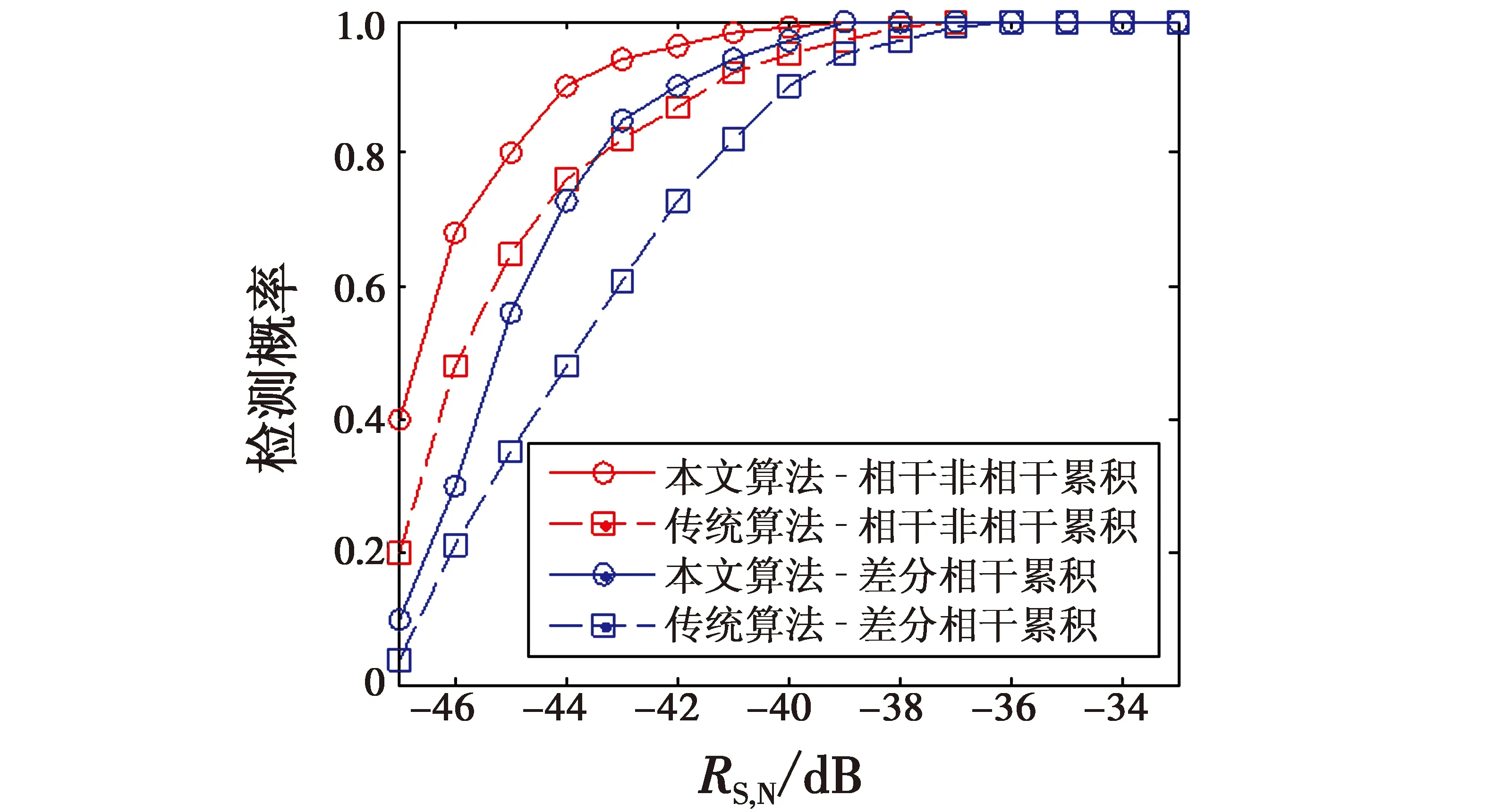
图3 捕获算法性能比较Fig.3 Performance comparison of the acquisition algorithms
图3结果表明,随着GPS信号信噪比的增加,各类捕获方法的检测概率均逐渐增加。对比相干非相干累积方法和差分相干累积方法这两种累积方法对不同信噪比GPS信号的捕获测试可知,采用改进并行算法的捕获性能均优于传统并行算法。例如,当利用相干非相干累积方法捕获信号时,传统并行捕获算法要达到90%的正确捕获概率,要求信噪比为-41 dB以上,而本文算法在信噪比约为-44 dB时即可实现90%的正确捕获要求,对弱信号的捕获性能优于传统并行捕获算法。改进并行算法的相干累积和差分累积捕获性能也优于传统并行捕获算法。这是因为,相比传统并行捕获方案,改进并行算法采用了平均相关技术和多普勒补偿方法。首先,平均相关技术可以在高采样频率下,以很小的码相位搜索步长实施信号捕获,虽然传统并行捕获方案也可以提高采样频率、减小码相位搜索步长,但由此带来的时间消耗问题会使得传统并行捕获方案不够实用;其次,多普勒补偿方法可以降低多普勒频偏对C/A码累积的影响,提高信号处理增益,捕获弱信号。
此外,对比图3中采用不同累积方法的改进并行捕获算法的捕获性能可知,基于相干非相干累积方法的检测性能优于差分累积方法。这是因为,差分相干累积虽然不存在平方运算,但相邻的数据相关会有一定误差,对弱信号的捕获有一定影响;相干非相干累积首先对无导航跳变的数据进行相干累积提高处理增益,然后再利用非相干累积进一步提高处理增益,能够适应信噪比较低的弱信号环境。因此,下一节的实测数据实验中采用相干非相干累积方法。
2.2 实测分析
利用美国SiGe半导体公司的SE4120L射频前端,混频后输出的信号频率为4.092 MHz,采样频率为16.368 MHz,将实际采集数据导入计算机中。捕获过程中,码相位搜索步长为Tc/64,采用相干非相干累积,相干累积12次,基于Matlab进行算法的捕获测试。图4为分别采用传统并行算法和改进并行算法结合相干非相干累积,对2017年8月18日15时左右10号GPS卫星的捕获结果。

图4 实际信号相干非相干累积捕获结果Fig.4 Coherent-incoherent acquisition results of practical GPS signal
结果表明,基于传统并行算法和改进并行算法的相干非相干累积均能够实现对GPS信号的有效捕获,但传统算法的峰值噪声比低于改进算法,难以完成对微弱信号的捕获。更为重要的是,在衡量捕获算法的另一个重要指标捕获时间消耗上,二者的差距很大。在同一台计算机中,对传统并行算法和改进并行捕获算法的时间消耗进行对比测试,码相位搜索步长同样设为Tc/64,采用相同的相干非相干累积方法,两种算法均运行1000次,测试结果如表1所示。

表1 时间消耗比较Table 1 Comparison of time consumption s
时间消耗的测试结果表明,本文算法的时间消耗远远低于传统并行算法,而正是由于时间消耗问题,传统并行算法无法应用于码相位精细搜索。本文算法的叠加相关作用于相干累积阶段,能够有效降低相干累积的时间消耗,而循环移位能够有效降低频率步进搜索过程中的时间消耗,因此能够满足码相位精细搜索的时间要求。
3 总结
本文研究了GPS软件接收机的C/A码高灵敏度快速捕获问题,提出了一种并行快速捕获算法,该算法采用平均相关技术和载频误差补偿提高捕获灵敏度,基于叠加相关和循环移位降低相干累积与频率步进搜索的时间消耗。实验结果表明,该算法能够有效捕获微弱GPS信号,且运算量适中,具有一定的工程应用价值。
参考文献
[1] HURD W J,STAT’MAN J I,VILNROTTER V A.High dynamic GPS receiver using maximum likelihood estimation and frequency tracking[J].IEEE Transactions on Aerospace and Electronic Systems,1987,23(4):425-437.
[2] 王尔申,张晴,雷虹,等.GPS空间信号可用性评估算法[J].电光与控制,2017,24(2):39-42.
[3] LEDVINA B M,PEIAKI M L,POWELL S P,et al.Bitwise parallel algorithms for efficient software correlation applied to a GPS software receiver[J].IEEE Transactions on Wireless Communications,2004,3(5):1469-1473.
[4] 唐斌,董绪荣,杨保平.GPS软件接收机基带信号处理研究[J].电光与控制,2007,14(1):115-119.
[5] MAO W L,CHEN A B.New code delay compensation algorithm for weak GPS signal acquisition[J].International Journal of Electronics and Communications,2009,63(8):665-677.
[6]STARZYK J A,ZHU Z.Averaging correlation for C/A code acquisition and tracking in frequency domain[C]//IEEE Midwest Symposium on Circuits and Systems, 2001:905-908.
[7] TANG B,LIU S S,TANG W T,et al.Design a L1 software receiver based on IF GPS signal simulator[C]//The 8th International Conference on Signal Processing,Beijing, 2006:112-115.
[8] 陈希,张锐,帅涛.基于FFT的GPS快速并行捕获算法[J].宇航学报,2011,32(1):162-166.
[9] 熊竹林,刘策伦,安建平,等.低复杂度高动态低信噪比环境下的GPS信号捕获算法[J].通信学报,2015, 36(3):179-184.
[10]ABOUD A H,RAMADAN R,ALSHARABATI T.Software defined radio implementing GPS parallel frequency space search acquisition algorithm in real time environment[C]//International Conference on Information and Communication Technology Research,2015:234-237.
[11] 李新山,郭伟.基于平均相关和差分相干累积的微弱GPS C/A码信号精密捕获算法[J].通信学报,2015, 36(5):1-4.
猜你喜欢
成都信息工程大学学报(2021年5期)2021-12-30
科技创新导报(2021年31期)2021-05-10
现代电子技术(2016年15期)2016-12-01
湖南城市学院学报(自然科学版)(2016年2期)2016-12-01
无线电工程(2016年5期)2016-10-13
河北科技大学学报(2015年5期)2015-03-11
时间频率学报(2014年2期)2014-06-21
电测与仪表(2014年2期)2014-04-04
电子设计工程(2014年18期)2014-02-27
电力自动化设备(2013年11期)2013-09-18