基于三角形距离能量的距离选通三维成像算法
2018-06-22 11:24侯云海魏洪鹏
长春工业大学学报 2018年2期
侯云海, 马 莹, 魏洪鹏, 穆 琳
(1.长春工业大学 电气与电子工程学院, 吉林 长春 130012;2.2956部队, 辽宁 大连 116000)
0 引 言
随着激光技术的发展,激光因其较好的穿透性、单色性而被引入主动成像技术中,激光主动成像技术的作用距离远,获取的图像效果清晰,因而受到人们的重视。后来,为了克服雨雪雾霾等恶劣天气对成像效果的影响,又将视线转移到了距离选通技术。十几年来研究了多种距离选通的方法,超分辨率三维成像技术就是其中的一种。该技术不但可以得到目标二维图像,还可以推算目标的距离信息,而且可以得到较高的分辨率,使其备受瞩目[1]。
文中介绍了三角形距离能量相关算法原理,并基于此算法对距离为17 m处的目标进行实验研究,给出了实验数据以及分析结果。
1 基于三角形距离能量相关算法的距离选通三维成像技术原理
激光距离选通三维成像原理示意图如图1所示。
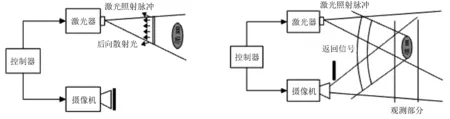
(a) 选通门关闭时 (b) 选通门打开时
距离选通工作过程:首先由激光器经匀光扩束处理后向目标物体发射激光,此时接收设备处于关闭状态,以屏蔽其他光的干扰(见图1(a)),待目标物体的反射光到达时,控制ICCD设备开启,接收目标的反射光(见图1(b))。通过控制ICCD的选通可以有效抑制大气的后向散射光对成像的影响,减小图像噪声[2]。
三角形距离能量相关算法原理如图2所示。
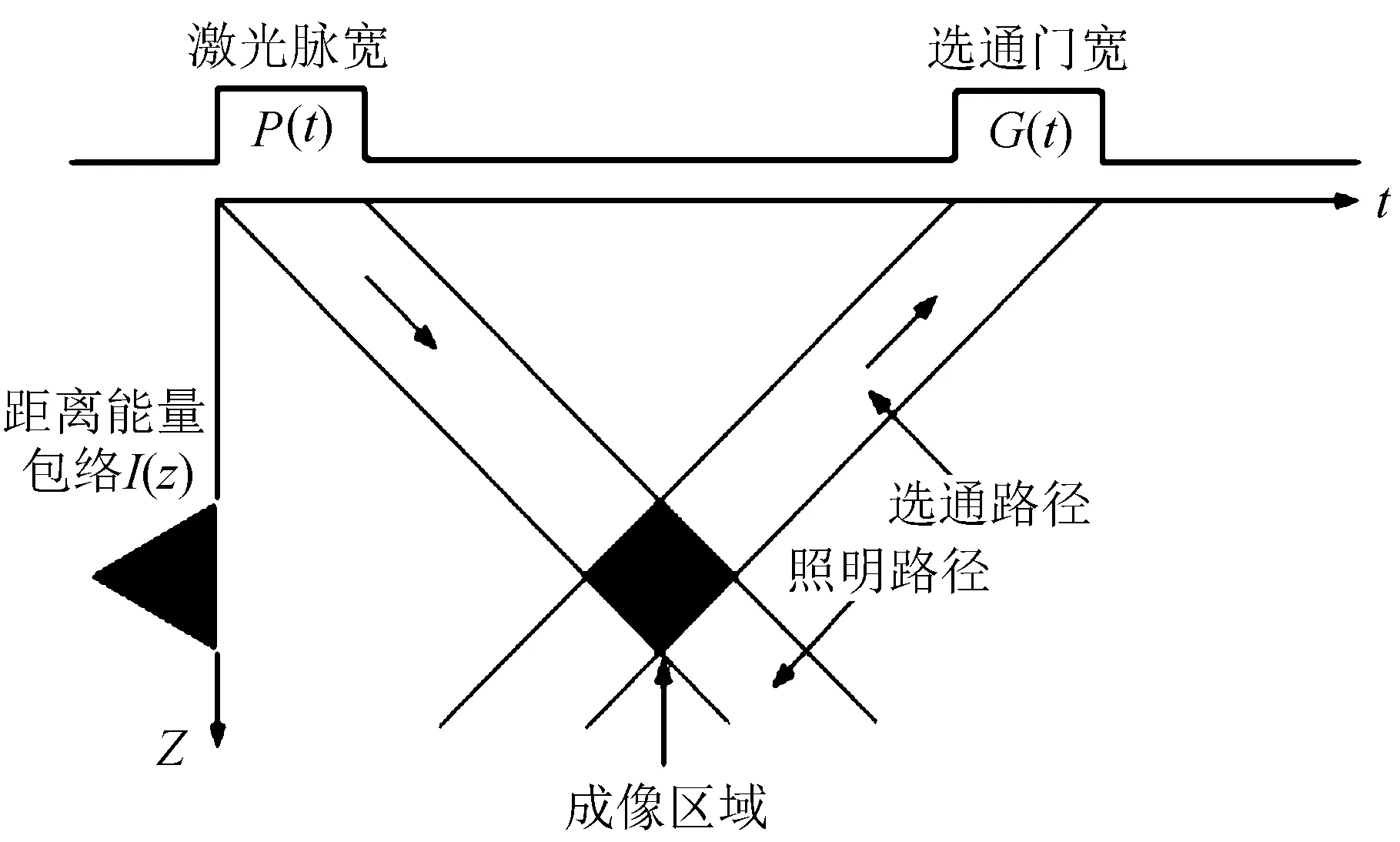
图2 三角形距离能量相关算法原理图
激光器发射一定宽度的激光脉冲照射目标物体,接收设备ICCD在预设时间延时后打开,选通一定时间,成像区域为激光照射部分与选通接收部分的焦点重叠区域,即图中阴影部分。
由于回波展宽效应,图像的能量强度可以由激光脉冲函数P(t-2r0/c)与选通函数G(t-τ)的卷积来表示,如下:
(1)
式中:c——光速;
r0——目标初始距离;
τ——激光脉冲上升沿与选通门开启之间的延时时间。
当激光脉宽与选通门宽相等时,图像强度能量包络为三角形,且头信号(上升边)与尾信号(下降边)宽度相等,均为tplsc/2。
激光器与选通ICCD的时序图如图3所示。
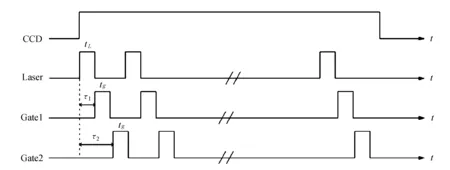
图3 激光器与选通ICCD的时序图
按此触发ICCD选通便可得到对应的二维图像。再将其相邻两张图像的信息按式(2)对图像强度值进行反演运算,得到目标的距离信息[3-4]如下:
(2)
式中:Ihead,B——第二张图像的头信号(三角形的上升边);
Itail,A——第一张图像的尾信号(三角形的下降边);
D——景深,D=tplsc/2。
2 实验及数据分析
实验使用的激光器波长为532 ns、重复频率为10 Hz、脉宽为13 ns,ICCD接收系统的门宽与激光脉宽相等设置为13 ns,实验目标为距离接收平台17 m处的纸盒箱。ICCD距离接收平台15 cm(即目标距离ICCD初始距离为17.15 m),目标物体长95 cm,水平投影长度为90 cm,实验实物图及结果如图4所示。
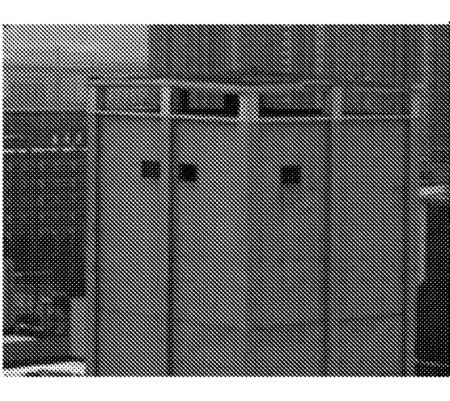
(a) 实景拍摄图像
(b) 实物灰度图像
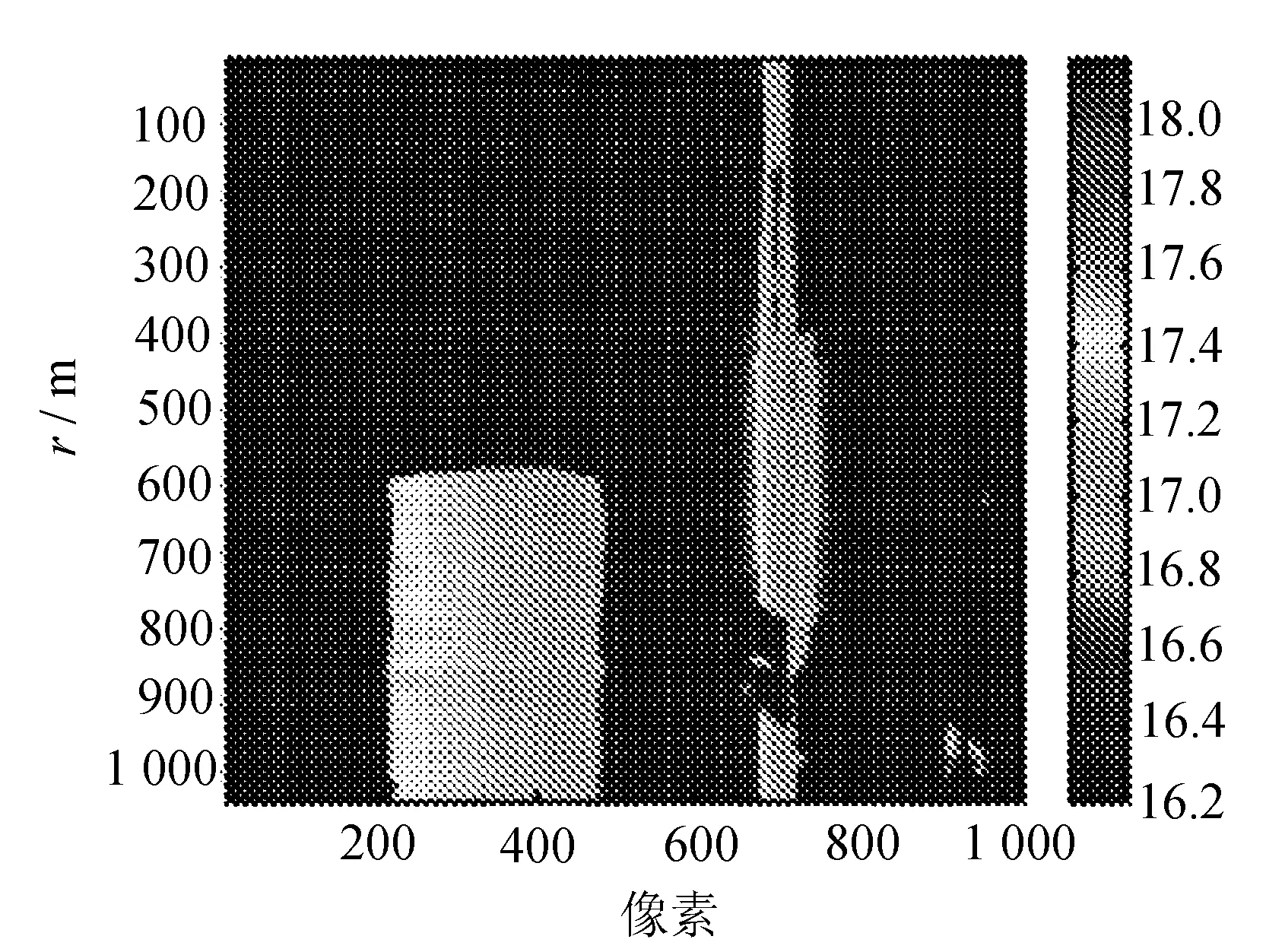
(c) 三维反演伪色彩图像
图4(a)为开灯时的实景拍摄图,图4(b)为ICCD实验中拍摄的实物灰度图像,图4(c)为距离能量相关算法计算处理后的三维反演伪色彩图像。由于镜头视场的原因,实验场地走廊右侧的门也进入了视野,由近及远伪色彩图像结果与预设结果一致。下面取目标箱子的图像数据,对计算得到的距离信息进行了进一步的验证[5]。
实验数据分析结果如图5所示。
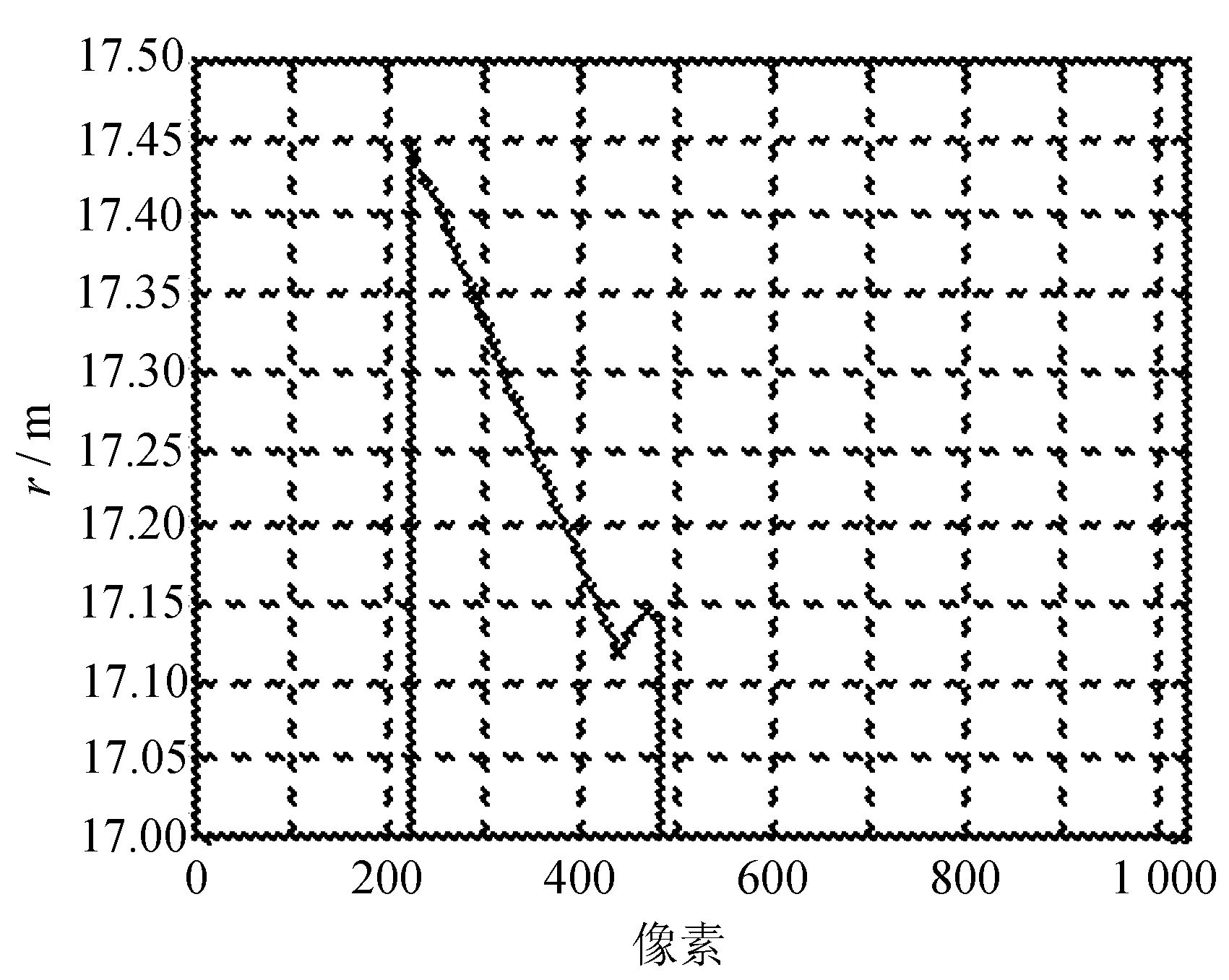
(a) 距离信息
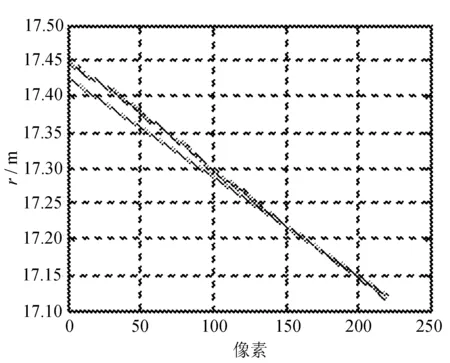
(b) 结果对比
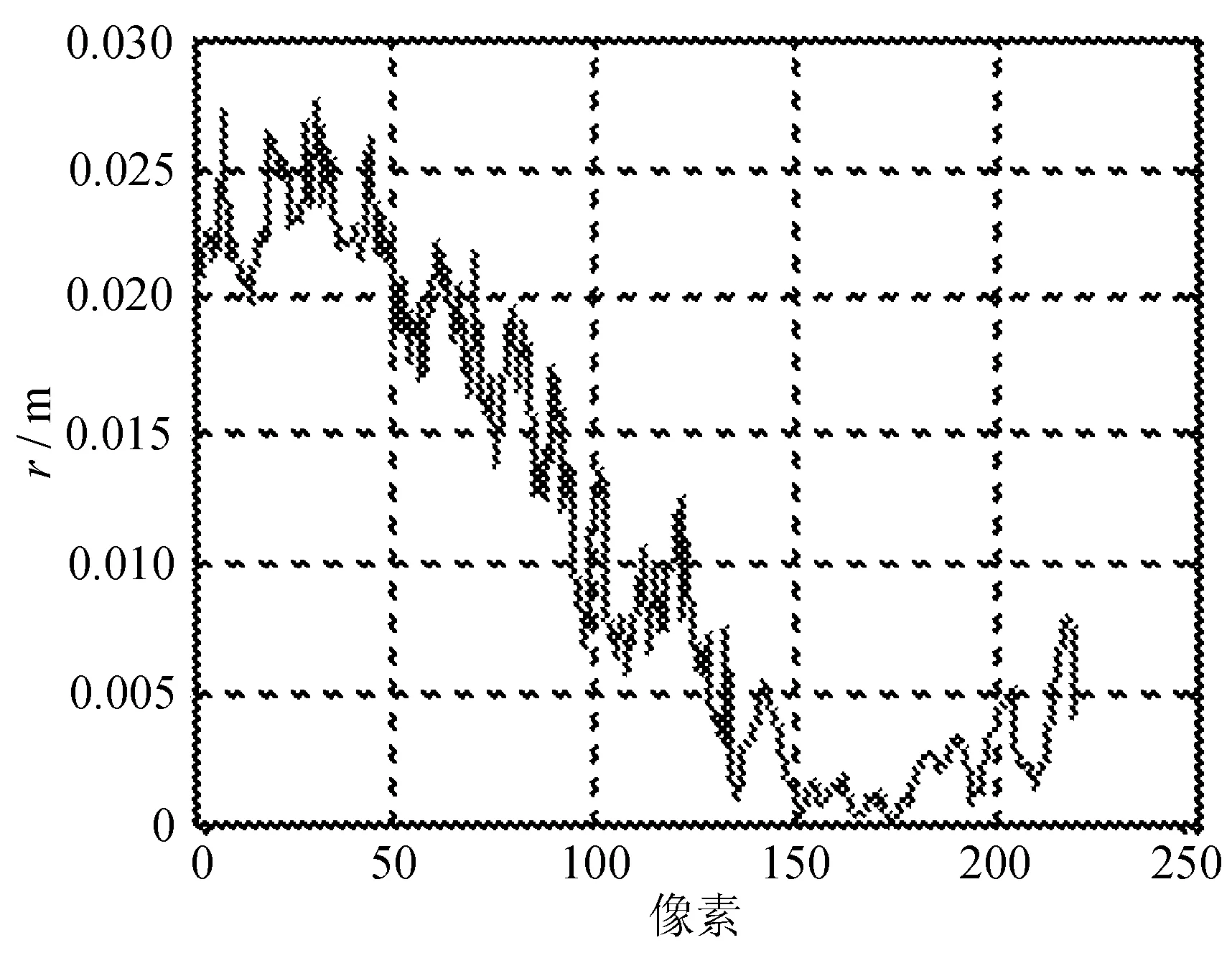
(c) 误差分析
图5(a)为对目标物体每列灰度值做均值处理后目标物体的距离信息,从图像中曲线走势可以看出其与实际情况相符;将实际距离进行计算,并将结果与算法所得结果进行对比(见图5(b));并且对测量值与实际值的误差进行分析,分析结果见图5(c),最大误差距离为0.027 5 m。
我们使用该设备在室外场景进行了实验,实验目标为205 m处小楼,接收设备与楼正面角度为45°,实验拍摄图及其三维距离伪色彩图像如图6所示。
(a) 实景拍摄图像

(b) 实物灰度图像

(c) 三维反演伪色彩图像
图6(a)为白天时候对该目标的取景,图6(b)为实验中对ICCD拍摄的其中一张灰度图像,图6(c)为距离能量相关算法计算处理后的三维反演伪色彩图像。由于是俯拍,激光反射回来会有一定的角度,所以从拍摄图像及处理图像中会有一定的角度而不是垂直的距离分段。
从实验结果可以看出,由中间向两侧距离逐渐增加,实验结果与实际一致。实验当天空气中雾霾较大,但从实验中拍摄的图像以及处理后的结果来看,该技术有效屏蔽了雾霾对成像及三维重构的影响[6-7]。
3 结 语
距离选通技术因其成像距离远,分辨率高,获取图像信息丰富等优势,近些年备受重视,该技术也得到了快速的发展。延时步进、增益调制、超分辨率等三维反演算法也被应用于该项技术中。文中对距离选通以及距离能量包络算法的原理进行了阐述,并基于三角形距离能量相关算法在室内外进行了实验,分析所得结果准确。该技术可以应用于军事探测侦察、丛林探测等方面,在军用、民用、国防等领域有着广泛的发展空间。
参考文献:
[1] 何欢.距离选通ICCD及其控制电路设计与实现[D].西安:中国科学院研究生院(西安光学精密机械研究所),2015.
[2] 马莹,侯云海,魏洪朋.激光距离选通三维成像技术原理及其应用[J].科技与创新,2017(22):152-153.
[3] 李达,李云霞,蒙文,等.激光主动成像技术应用及发展[J].电光与控制,2013,20(9):59-63.
[4] 侯云海,董雪芳,刘东东.嵌入式风速风向传感器精度检测仪[J].长春工业大学学报,2016,37(5):465-469.
[5] Xiuda Zhang, Huimin Yan, Yanbing Jiang. Pulse-shape-free method for long-range three-dimensional active imaging with high linear accuracy [J]. Optics Letters,2008,33(11):1219-1221.
[6] Zhang Xiuda, Yan Huimin. Three-dimensional active imaging with maximum depth range [J]. Applied Optics,2011,50(12):1682-1686.
[7] Wang Xinwei, Li Youfu, Zhou Yan. Triangular-range-intensity profile spatial-correlation method for 3D super-resolution range-gated imaging [J]. Applied Optics,2013,52(30):7399-7406.
猜你喜欢
昆明医科大学学报(2021年6期)2021-07-31
科学(2020年5期)2020-11-26
小哥白尼(趣味科学)(2019年2期)2019-04-17
小学生导刊(2018年34期)2018-12-18
文理导航·科普童话(2017年7期)2018-02-10
小天使·四年级语数英综合(2017年6期)2017-06-07
小天使·二年级语数英综合(2017年3期)2017-04-01
小学生导刊(低年级)(2016年6期)2016-07-02
儿童故事画报·发现号趣味百科(2016年3期)2016-06-24
山东青年(2016年3期)2016-02-28