
六轴工业机器人控制系统研究与设计
2018-06-25 08:31吴德君
装备制造技术 2018年4期
吴德君
(陕西国防工业职业技术学院,陕西 西安 710300)
20世纪50年代末,通用性强的工业用自动操作装置被美国研制出来,后来被称为工业机器人[1]。该装置能够代替人类在危险、多变、要求严谨的环境中工作,甚至在多数场合能比人工更为可靠而高效的工作;在深海、太空等人类难以企及的环境中,机器人能完成人类根本不能胜任的任务。工业机器人研制出后,各国家均十分重视工业机器人的设计与研究,在该装置的研究上取得了很大的进步。控制系统作为工业机器人的核心,成为了机器人研究领域的研究重点。现在大多数控制系统通用性弱不强,开放性差且不易于扩展。本文设计的双级控制系统能满足多种领域的工业机器人控制要求,可以提高工业机器人控制系统的开放性及灵活性,具有一定的研究价值及意义。
1 工业机器人结构
如图1所示,工业机器人一般由机械本体、驱动装置、控制系统、传感器系统与视觉系统等部分构成[2]。机械本体是是工业机器人的执行机构,属于机器人的机械结构,主要由底座、臂部、腕部、关节以及末端执行器构成。末端执行器上面装配不同夹持器、夹具、手部等就能实现不同的功能,是直接执行操作的装置。驱动装置主要提供动力给机械本体,电气传动、液压传动以及气压传动是常用的三种驱动方式,目前使用较多的是电气传动,能源便于获得,效率较高。电气传动一般使用交流伺服驱动系统,由交流伺服电机、驱动器和减速器等部分构成[3-4]。
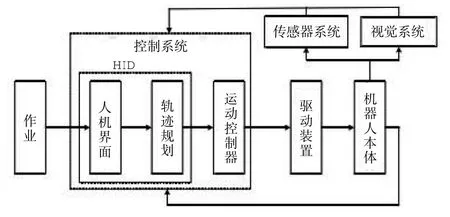
图1 工业机器人系统结构
2 控制系统硬件架构
控制系统硬件实现采用两级计算机控制结构,如图2所示。该结构的最大优势在于当系统需要完成复杂、精密度高的任务时,工业机器人的控制系统能够快速、有效、可靠的分解和规划工作任务,对于不同的工作部分还可以并行实现。
2.1 上位机
工业机器人控制系统硬件结构顶层上位机采用工控机控制,工控机具有技术成熟、可靠、接口丰富等明显优势,如果系统需更换下位机,只要选择合适控制接口与下位机连接即可。除此之外,工业机器人路径规划、插补运算还有运动学的正逆向求解都需要上位机拥有快速运算能力和较大容量存储能力。与此同时,工控机能够根据用户需要选择Linux或者Windows等主流操作系统,并在选择的系统上安装相对成熟的软件工具为工业机器人控制系统提供软件上的扩展,现阶段常在工控机上安装MicroSoft VisualC++或Qt等可视化软件开发环境,用以开发友好直观的人机交互界面,以此作为工业机器人控制软件。
2.2 下位机
采用DMC-2163运动控制卡作为下位机控制系统。该运动控制卡是Galil公司DMC-21x3系列运动控制卡的一种。DMC-2163作为独立型运动控制卡,具有灵活多变的特点,同时能够控制多达6个不同类型的电机,所配置的RS232和Ethernet等接口能够和触摸屏与上位机等上层设备连接进行数据传递。

图2 控制系统硬件结构
3 关节伺服电机和驱动器
本设计采用日本松下MINAS系列交流伺服电机及驱动器,该驱动器控制模式灵活多样,如转矩、位置、速度控制以及组合控制等,本设计伺服驱动器采用位置控制模式。MINAS系列驱动器能够快速处理来自DMC-2163运动控制卡的指令,按照指令要求快速准确地驱动伺服电机;该驱动器可以自动调整增益从而使伺服电机尽最大可能按照运动控制卡所发指令运行。系统所配置的伺服电动机末端均安装有光电编码器,与伺服电动机一同连接到伺服驱动器对应的接口;工控机发出指令到DMC运动控制卡,该卡与伺服驱动器相连,这就能够获得电动机所转过的角度,整个控制系统便构成一个闭环系统。
工业机器人伺服驱动系统与DMC-2163运动控制卡必须正确连接,才可以确保顶层控制软件对工业机器人各个关节进行准确可靠的控制。ICM-20105D通过表1的对应方式与松下MINASA4-CNI/F伺服驱动器相互连接。
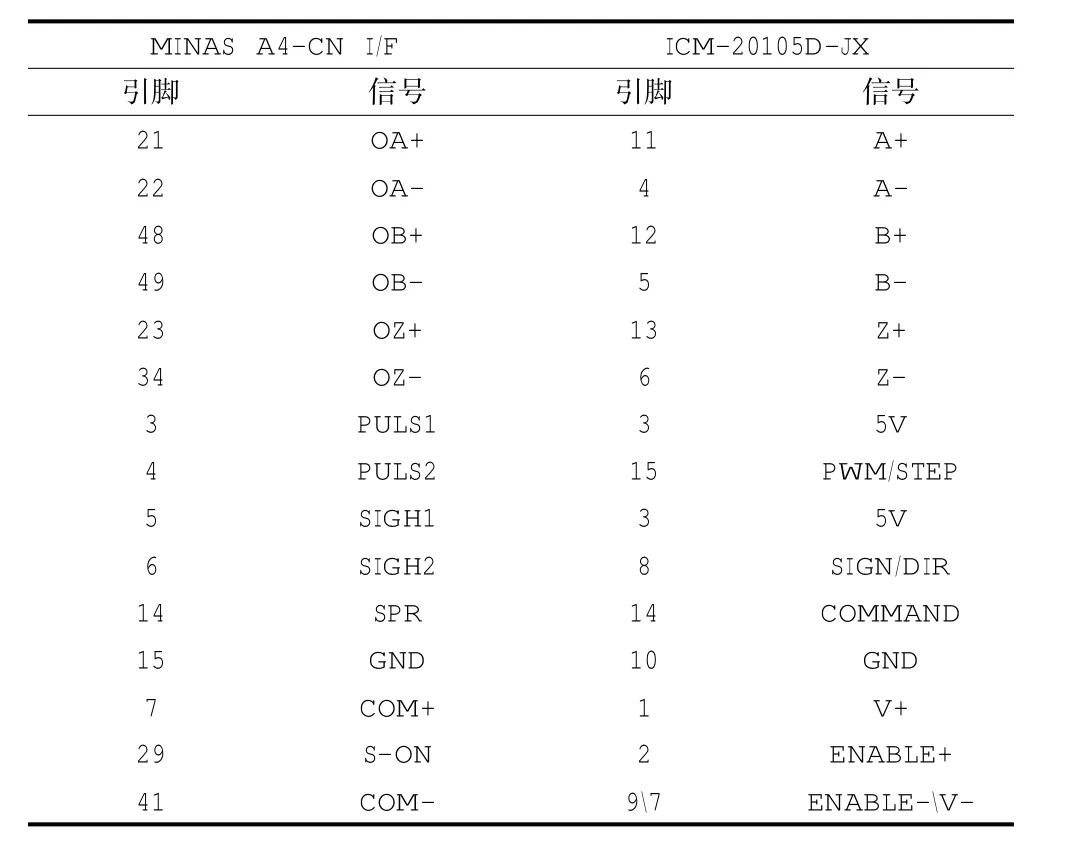
表1 ICM-20105D与松下MINASA4-CNI/F伺服驱动器信号对应关系
4 工控机软件设计
据工业机器人控制软件设计要求搭建了模块化的机器人控制软件系统,如图3所示。第一步在Win7上配置Qt开发环境。第二步,新建工程,添加DMC-2163运动控制卡的动态链接库、头文件(dmcwin.h)和实现文件(dmcwin.cpp)到新工程中。第三步,使用作为主类的QMain Window,QWidget和QDialog的派生类达到各控制模块要求。通过Qt信号、全局变量、配置文件、事件管理等方式进行各控制模块间信息传递。机器人控制软件系统划分为指令程序管理、控制卡操作、机器人操作、轨迹规划、示教再现以及系统设置六个功能模块。
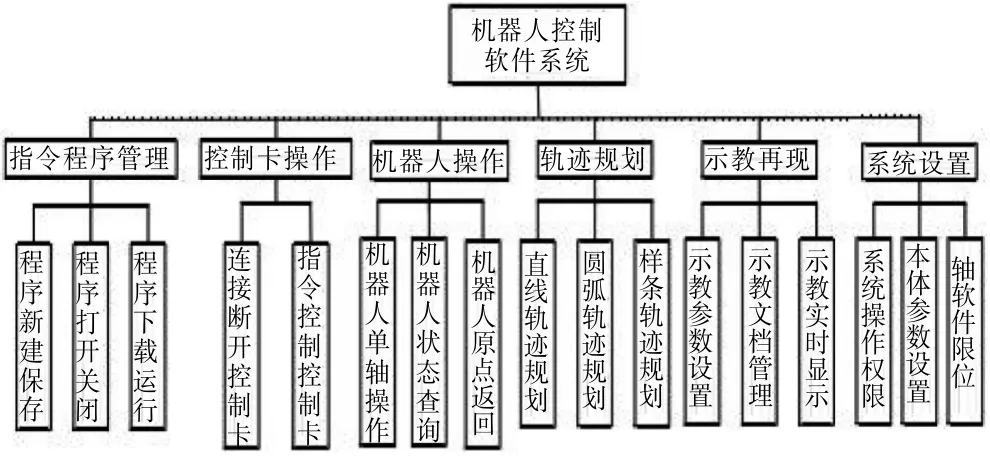
图3 机器人控制软件框图
DMC-2163运动控制卡本身具有32位高速处理器、随机存储器和Flash闪存,可实现程序解析、指令解析、运动方式规划以及通信等。所以可以将程序下载至运动控制卡存储器中,再脱机主机运行,这样主机就能转而处理其他工作任务。此种程序后缀名是dmc,是已提供的ASCII格式指令,部分程序如下:
#AxisD; ′标号
KSD=8; ′伺服电动机速度平滑处理
DPD=0; ′设定D轴电动机当前位置为0
FLD=30000; ′设定正向软限位30000
BLD=-30000;′设定反向软限位-30000
PRD=20000; ′向右转20000计数单位
SPD=8000; ′设定D轴运动速度
ACD=25600; ′设定D轴运动加速度
DCD=25600; ′设定D轴运动减速度
SHD; ′打开电动机
EN; ′结束程序
在主窗口工具栏和“文件”菜单均提供了程序下载与执行功能,能够把编辑好的程序下载至运动控制卡中再执行。机器人控制软件系统中模块指令程序管理用于测试运动控制卡功能,编写用户指令程序可以采用DMC-2163运动控制卡所提供的两字符指令集。
5 结束语
本设计在现有六轴工业机器人机械本体与配套的松下伺服驱动系统基础上,构建了一套使用DMC-2163运动控制卡作为控制系统下位机,以PC机作为上位机的六轴工业机器人控制系统。控制系统具有较强的通用性和扩展性,控制软件将不同功能设计成不同的模块,并提供了改变机器人参数的界面,使得系统结构清晰、便于操作,能够可靠有效的应用于工业机器人。
[1]刘极峰,易际明.机器人技术基础[M].北京:高等教育出版社,2006.
[2]徐 灏.疲劳强度设计[M].北京:机械工业出版社,1980.
[3]郭 伦.六自由度并—串结构工业机器人的设计[D].青岛:青岛科技大学,2013.
[3]林 威,江五讲.工业机器人笛卡尔空间轨迹规划[J].机械工程与自动化,2014(5):141-143.
[4]Lee C S G.Robot arm kinematics,dynamics,and control[J].Computer,1982,15(12):62-80.
猜你喜欢
北华大学学报(自然科学版)(2021年3期)2021-07-13
微特电机(2020年11期)2020-12-30
电脑爱好者(2020年6期)2020-05-26
铁道通信信号(2020年12期)2020-03-29
电子制作(2018年17期)2018-09-28
铁道通信信号(2018年6期)2018-08-29
通信电源技术(2018年3期)2018-06-26
北京航空航天大学学报(2017年5期)2017-11-23
电子制作(2016年1期)2016-11-07
自动化博览(2014年6期)2014-02-28
