
基于数值分析的船舶斜航运动水动力研究
2018-07-03 02:17廉静静
重庆交通大学学报(自然科学版) 2018年7期
廉静静,杨 晓,尹 勇
(1.大连海事大学 航海学院,辽宁 大连 116026; 2. 大连海事大学 航海动态仿真和控制实验室,辽宁 大连 116026)
0 引 言
船舶操纵性能与船舶航行的安全性紧密相关,为了提高船舶的航行安全,负责海事安全的国际海事组织IMO(International Maritime Organization)于1993年颁布实施了InterimStandardsforShipManeuverability[1]以及2002年通过了StandardsforShipManeuverability[2],这使得船舶的操纵性能越来越受到关注和重视。近年来,由于采用数值计算方法能够提供船体和螺旋桨叶面周围独特的定性和定量流场信息,它已成为求取船舶操纵性水动力导数主流方法之一,可将取得船舶操纵性水动力导数代入船舶操纵运动方程,对船舶的操纵性实现预报,同时,采用数值计算方法也逐步成为船模实验方法的主要辅助手段。
利用计算流体动力学(computational fluid dynamics,CFD)方法研究船舶水动力性能,国内外学者均开展了相关研究工作 , B. J. GUO等[3]研究了在顶浪中KVLCC2船舶运动的附加阻力;Y. T. JIN等[4]考虑了船舶尺度大小对KVLCC2船舶水动力系数的影响;田喜民等[5],刘晗等[6]对KVLCC2不同漂角的斜航运动进行了模拟,但这些研究对船体周围漩涡流场分布情况并未关注,且船体周围漩涡对船体的阻力、噪声密切相关,从而对船舶操纵性产生影响。笔者选用国际操纵性标准船型KVLCC2为研究对象,采用ANSYS FLUENT 14.5软件对该船模的斜航运动的黏性流场进行了数值模拟,对黏性流场中数值模拟中的计算网格、湍流模型等关键技术问题进行了深入研究,获得作用在船舶上的纵向水动力、横向水动力、艏摇力矩,并将计算的数值结果与日本海上技术安全研究所(National Maritime Research Institute,NMRI)实验结果进行比较分析,同时采用最小二乘法进行曲线拟合,求得船舶操纵水动力导数,采用Q准则获得了船舶周围的漩涡流场。
1 数学模型
1.1 控制方程
求解各种计算模型流场及流体动力所采用的基本方法是RANS方法[7],其RANS方程的形式如下:
(1)
1.2 湍流模型
分析比较了几种湍流模型的适用性,笔者选用的湍流模型为重整化群RNG(Renormalization Group)κ-ε模型,与求解高雷诺数的标准Standard κ-ε湍流模型相比,重整化群RNG κ-ε湍流模型考虑了低雷诺数的影响,通过在大尺度运动和修正后的湍流黏度项体现了小尺度的影响,使得在平均流动中的旋转及漩流流动情况得以处理,同时,在重整化群RNG κ-ε模型中引入时均应变率Eij,从而使得高应变率和流线弯曲程度较大的流动该模型能够更好地处理。该模型由V. YAKHOT等[8]于1986年提出的。该湍流模型是通过重整化数学方法推导出瞬时的NS方程,重整化群RNG κ-ε模型方程[9]为
ρε-YM+Sκ
(2)
(3)

1.3 Q准则
Q准则是由J. C. R. HUNT等[10]提出的,通过使用正值Q来作为流场漩涡的识别方法,当Q值为正时,说明该流场区域内的流体微元以旋转运动为主导,当Q值为负时,则说明该流场区域内的流体微元的旋转运动较弱。定义流场中速度梯度张量的第二矩阵不变量Q可表达为
(4)
式中:Wij为速度梯度张量的旋转率张量,代表纯粹旋转运动;Sij为速度梯度张量应变率张量。
2 数值计算
笔者研究对象为国际标准船型KVLCC2油轮,船舶模型如图1,其船模的主要参数如表1。

图1 KVLCC2 船模Fig. 1 KVLCC2 ship model
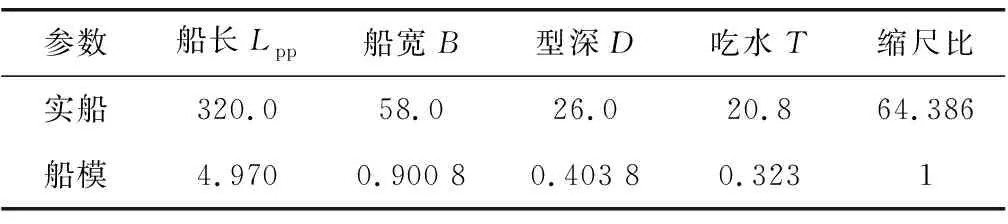
m
首先构建计算域的几何模型,即求解计算时的离散积分空间,依据船舶斜航运动的物理问题,确定计算域的大小。计算域如图2(以下船长记为L),距离船首1.5L设置为上游边界,距离船尾3L设置为下游边界,向下距离1.5L处设置为水深方向,左右两侧方向为1.5L。只有根据物理条件,给出合理的边界条件,才能获得流场的正确解,上游边界是速度进口边界,船舶航速是0.994 m/s,对应的Froude数为0.142 4,为低速船,自由面兴波影响较小,故采用“叠模”模型,将自由面视为对称边界,船舶的两侧和计算域的底面视为无滑移壁面边界条件,船体看作无滑移壁面边界条件,下游边界看作出流outflow边界。
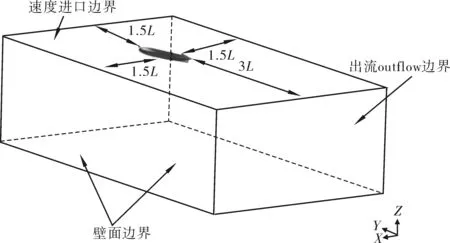
图2 计算域Fig. 2 Computational domain
采用有限体积法对微分方程进行离散时,需要将控制方程在空间区域上进行离散,随后求解得到离散方程组,需要生成网格将控制方程在空间区域上进行离散,且网格质量和数量直接影响计算精度与计算速度,可通过前处理软件ICEM CFD对整个计算域进行网格划分,如图3船舶表面网格。在整个网格划分过程中,尽量使用结构网格以减少网格数量,提高计算速度,在船舶球鼻首和船舶尾部的地方采用结构网格比较困难,可以利用非结构网格进行划分,网格生成方法采用自上而下的方法,船舶首尾部曲率大的线条部分线网格加密尺寸小,使得该部分网格较为密集,相比之下,船舶首尾部和舭部面网格加密尺寸较大,以便减少整个计算域内网格数量。当处理近壁面流动时,边界层内的位置通常用无量纲形式y+来表示,y+是以垂直于壁面的距离为长度尺度,即为第一个网格点到壁面距离,此处将边界层棱柱网格y+可设置为30,整个计算域网格总数为70万左右,图4为整个计算域的网格划分远观图。为提高计算效率,计算域内网格数量不能过多,但考虑精度,某些区域的网格数量还需加密,主要依据计算时耗时和计算的精度,从两者中折中确定网格数量。采用压力耦合方程组的半隐式SIMPLE算法求解连续方程中建立的压力修正方程,得到压力场的修正值,利用压力修正值更新速度场和压力场,不收敛时重复迭代,最终得到压力场和速度场的收敛解,为了保证计算过程中空间离散不发散,在初始阶段,采用一阶迎风格式离散动量、湍流动能和湍流耗散率等参数,待计算稳定后采用二阶迎风格式即可,这样即可以保证稳定性又提高准确性,同时,为保证计算的收敛性,改变亚松弛因子。

图3 船舶体表网格Fig. 3 Ship hull surface mesh
3 结果与分析
笔者计算了KVLCC2斜航船模漂角分别为0°、3°、6°、9°和12°时的纵向力系数、横向力系数和艏摇力矩系数,如图5,并将计算得到的结果与日本NMRI获得的试验结果[11]进行对比,从图5中可以看出,实验结果吻合较好,漂角较小时,数值计算的船舶的横向力系数与试验结果比较误差约为6%左右,在整个计算过程中,船舶纵向力系数与试验结果误差较大,约为12%左右,误差与离散时间步长、离散方法和网格疏密等因素有关,湍流动能值和湍流耗散值会对横向阻力系数和纵向阻力系数产生影响,选择合适的湍流动能值和湍流耗散值是非常重要的。

图5 纵向力系数、横向力系数及艏摇力矩系数Fig. 5 Longitudinal force coefficientlateral force coefficient and yaw moment coefficient
根据最小二乘法原理进行曲线拟合,求得船舶水动力导数,如表2,图6为不同侧向速度下水动力导数的曲线拟合结果。
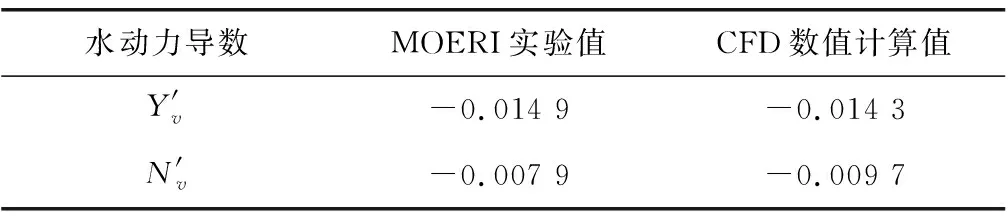
表2 船舶水动力导数Table 2 Ship hydrodynamic derivatives
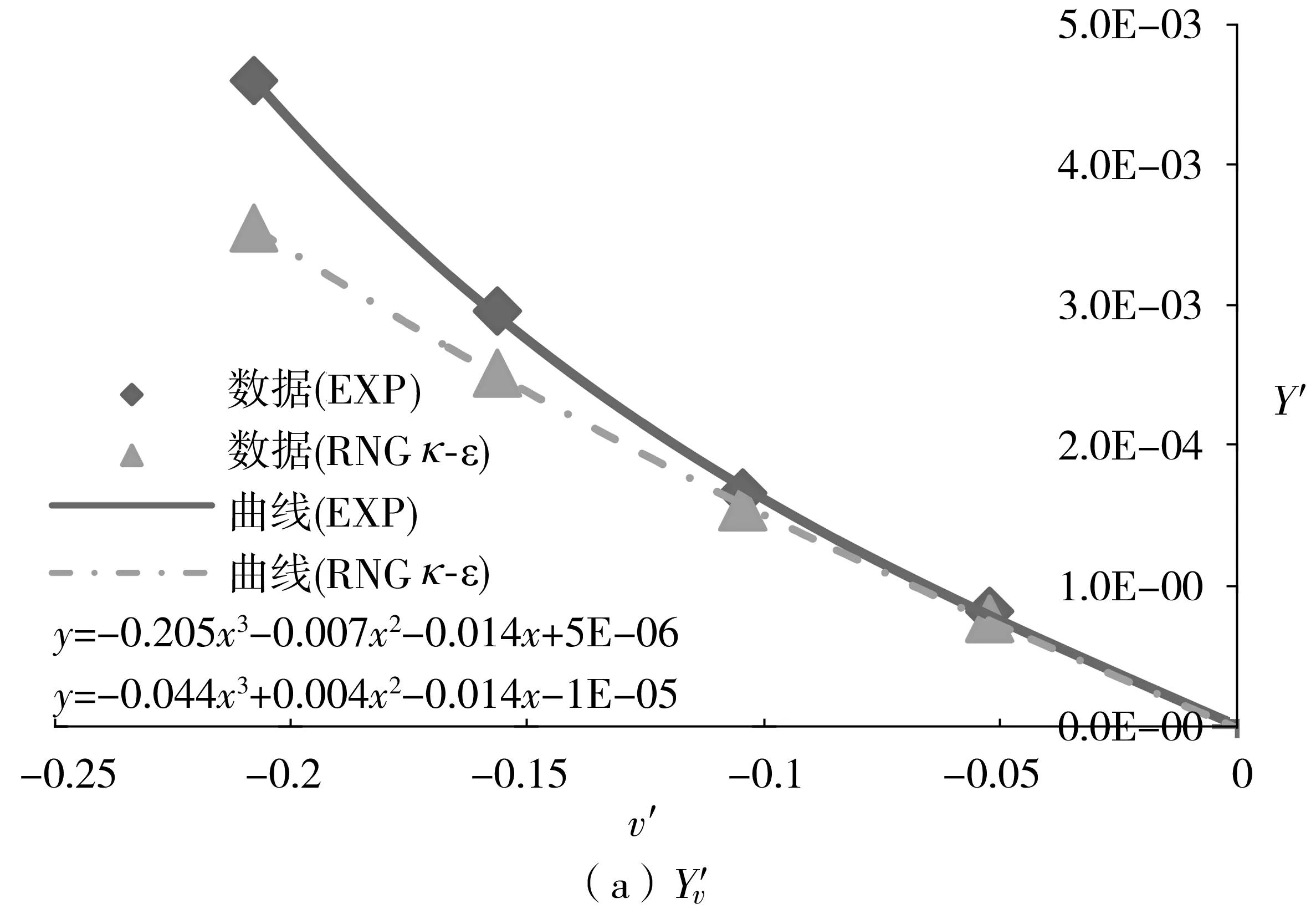

图曲线和曲线拟合Fig. curve and curve fitting
将漂角为12°时船体艏部和尾部表面压力系数分布与日本NMRI[12]实验数据进行比较如图7。从图7中可以看出采用数值计算的结果和实验数据结果相似,在船首部迎风面所受的压力较大,背风面所受压力较小,而船尾则相反。两者不同之处为,实验数据在船舶尾部背风面和迎风面压力系数曲线中某条线出现了闭合,数值模拟并非发现该现象。
图7 β=12°时船体表面压力系数分布Fig. 7 Hull pressure coefficient distribution(β=12°)
通常Q准则可观测到船舶周围的涡结构,图8是漂角为0°、3°、6°、9°和12°时船舶周围的漩涡流场。
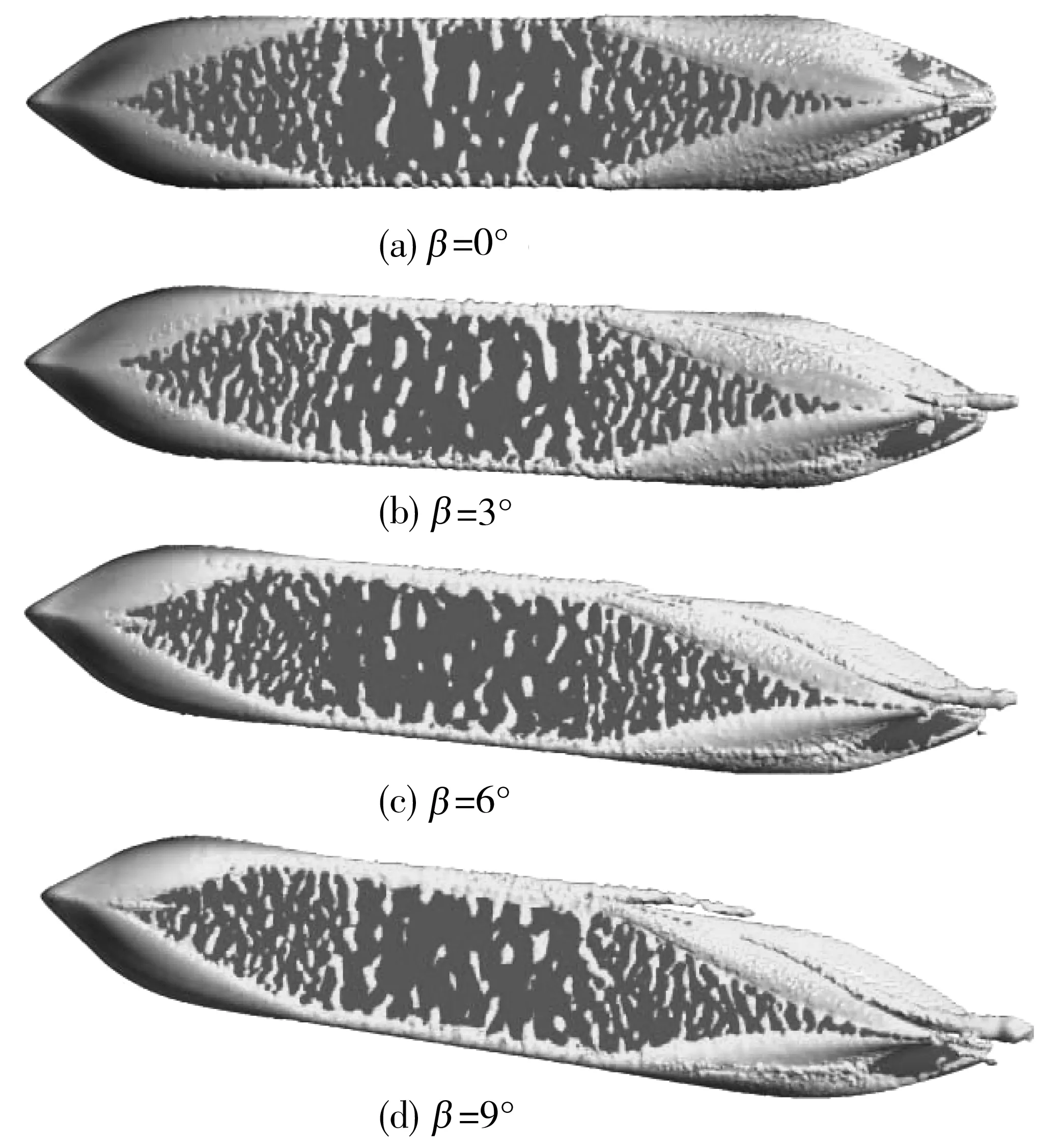
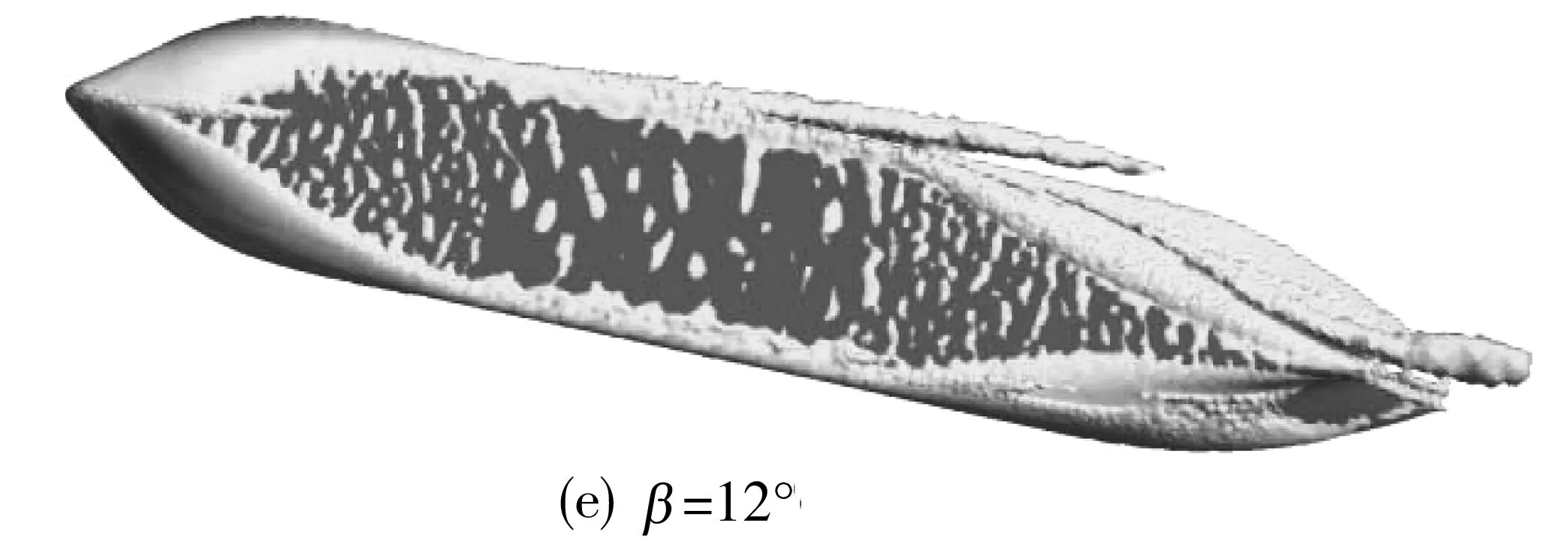
图8 船体周围的漩涡流场Fig. 8 Vorticity flow distribution around ship
从图8中可以看出,随着漂角逐渐增加,船舶周围的漩涡流场变得更加复杂,尤其是船舶尾部锥形部分和船中部周围流场高度复杂,这是因为随着漂角逐渐增加从船舶中部侧漩涡越发明显,逐渐出现分离,这使得漩涡结构得到了充分发展。当漂角为0°时,船舶KVLCC2周围的漩涡流场受到船首和船尾锥形部分边界层发展支配。当漂角为12°时,船首舭部漩涡、船首侧涡、船尾漩涡、侧漩涡逐渐形成,同时,船舶尾部漩涡在迎风面与船舶尾部侧涡合并在一起,如图9,在背风面与船舶尾部发卡涡合并在一起,在船首舭部漩涡看起来有些卡门涡脱落,而船舶首部侧漩涡有些螺旋不稳定,产生了一些螺旋波动和螺旋漩涡。
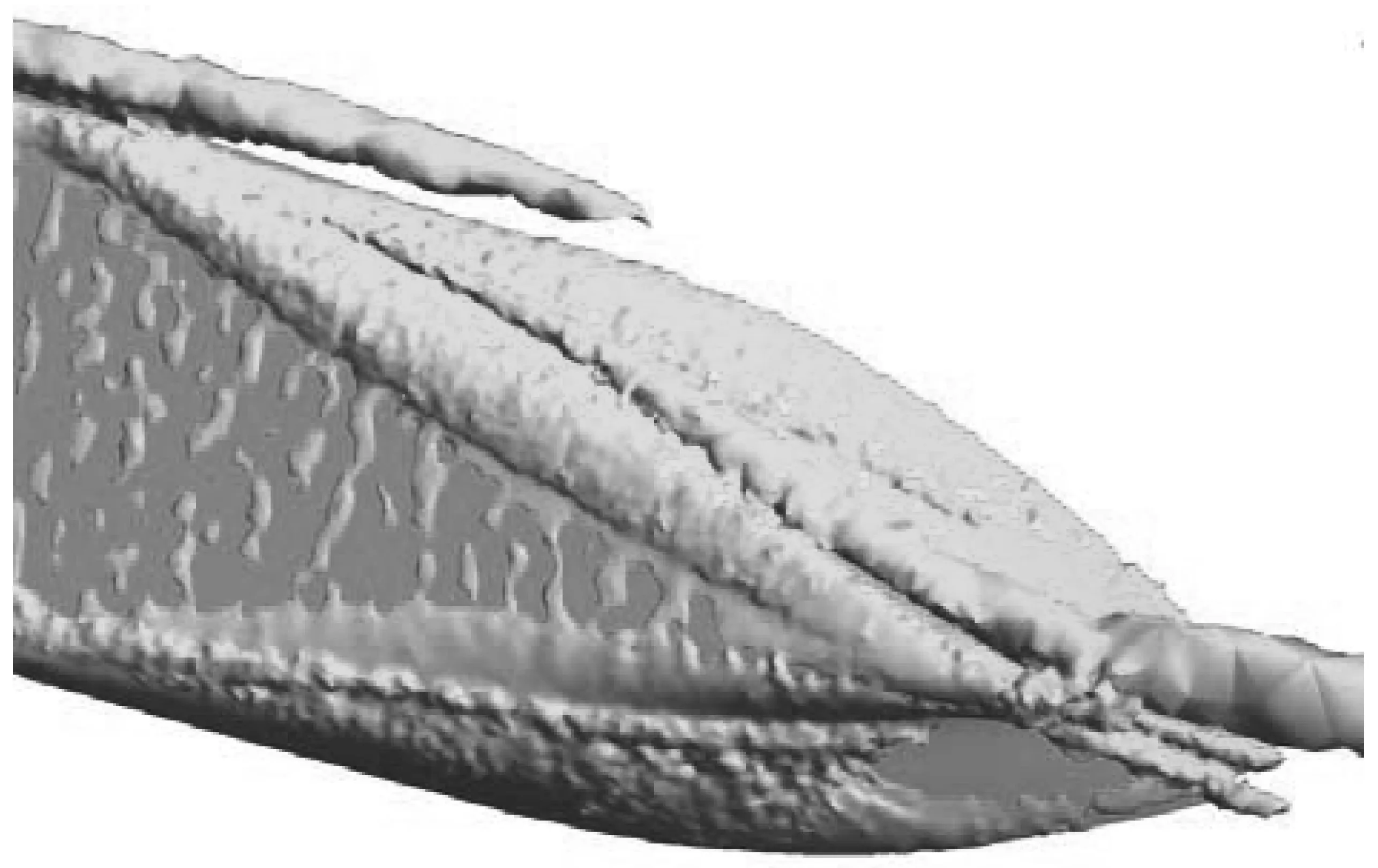
图9 船尾局部漩涡流场(β=12°)Fig. 9 Vorticity flow distribution around ship stern(β=12°)
4 结 语
通过求解不可压缩黏性流的RANS方程,结合重整化群RNGκ-ε湍流模型,对KVLCC2船舶斜航运动的黏性流场进行数值模拟,计算不同漂角下船舶所受的纵向水动力、横向水动力、艏摇力矩,并将其计算获得的结果与实验数据相比较,吻合较好,计算结果产生的误差在允许的范围内,湍流动能值、湍流耗散值、离散时间步长、离散方法和网格疏密对计算结果有影响,同时采用最小二乘法进行曲线拟合,求得船舶操纵水动力导数,采用Q准则获得了船舶周围的漩涡流场,当船舶漂角逐渐增加时,船体周围
的漩涡越发复杂。采用数值分析的方法求取水动力导数,将计算的结果带入船舶运动方程中,为船舶CFD实现实用化提供一种有效的思路。
参考文献(References):
[1] International Maritime Organization (IMO).ResolutionA. 751(18):InterimStandardsforShipManeuverability[S]. London: IMO, 1993.
[2] International Maritime Organization (IMO).ResolutionMSC.137 (76):StandardsforShipManeuverability[S]. London: IMO, 2002.
[3] GUO B J, STEEN S, DENG G B. Seakeeping prediction of KVLCC2 in head waves with RANS[J].AppliedOceanResearch, 2012, 35:56-67.
[4] JIN Y T, DUFFY J, CHAI S H,et al. URANS study of scale effects on hydrodynamic manoeuving coefficients of KVLCC2[J].OceanEngineering, 2016, 118:93-106.
[5] 田喜民, 邹早建, 王化明. KVLCC2 船模斜航运动黏性流场及水动力数值计算[J]. 船舶力学, 2010,14(8):834-840.
TIAN Ximin, ZOU Zaojian, WANG Huaming. Computation of the viscous flow and hydrodynamic forces on a KVLCC2 model in oblique motion[J].JournalofShipMechanics,2010,14(8): 834-840.
[6] 刘晗,马宁,邓德衡,等. 循环水槽平面运动机构试验及其斜航试验的数值模拟[J]. 大连海事大学学报, 2016,42(2):8-13.
LIU Han, MA Ning DENG Deheng ,et al. Planar motion mechanism tests in circulating water channel and numerical simulation of oblique towing[J].JournalofDalianMaritimeUniversity, 2016, 42(2):8-13.
[7] 王福军.计算流体动力学分析——CFD软件原理与应用[M].北京:清华大学出版社,2004:7-10.
WANG FuJun.ComputationalFluidDynamicsanalyzer:softwareprincipleandapplication[M].Beijing: Tsinghua University Press, 2004:7-10.
[8] YAKHOT V, ORSZAG S A, PANDA R. Computational test of the renormalization group theory of turbulence[J].JournalofScientificComputing, 1988, 3(2):139-147.
[9] ORSZAG S A, YAKHOT V, FLANNERY W S, et al. Renormalization group modeling and turbulence simulations[C]//InternationalConferenceonNear-WallTurbulentFlows,Tempe,Arizona. Tempe, Arizona:[s.n.], 1993.
[10] HUNT J C R, WRAY A A, MOIN P. Eddies, stream and convergence zones in turbulent flows[C]//StudyingTurbulenceUsingNumericalSimulationDatabases,Proceedingsofthe1988SummerProgram. United States:[s.n.], 1988: 193-208.
[11] JACQUIN E, GUILLERM P E, DROUET A, et al. Simulation of unsteady ship maneuvering using free-surface RANS solver[C]//Proceedingof26thSymposiumonNavalHydrodynamics. Rome,Italy:[s.n.],2006.
[12] KUME K, HASEGAWA J, TSUKADA Y, et al. Measurements of hydrodynamic forces, surface pressure, and wake for obliquely towed tanker model and uncertainty analysis for CFD validation[J].JournalofMarineScienceandTechnology, 2006, 11(2): 65-75.
猜你喜欢
空气动力学学报(2020年1期)2020-11-29
中国特种设备安全(2018年10期)2018-12-18
汽车观察(2018年10期)2018-11-06
中外文摘(2017年19期)2017-10-10
海洋信息技术与应用(2017年2期)2017-06-21
中国卫生(2016年4期)2016-11-12
汽车实用技术(2015年8期)2015-12-26
中国石油大学学报(自然科学版)(2015年2期)2015-11-10
专用汽车(2015年8期)2015-03-01
国外科技新书评介(2014年5期)2014-12-17
